机器视觉运动控制一体机在DELTA并联机械手视觉上下料应用

市场应用背景
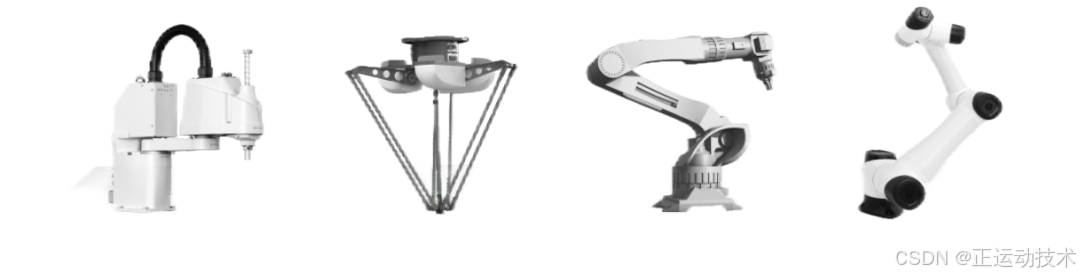
DELTA并联机械手是由三个相同的支链所组成,每个支链包含一个转动关节和一个移动关节,具有结构紧凑、占地面积小、高速高灵活性等特点,可在有限的空间内进行高效的作业,广泛应用于柔性上下料、包装、分拣、装配等需要快速重复操作的领域。
DELTA并联机械手结合柔性振动盘、视觉定位系统,能够高效地完成对各种物料的无损、柔性上下料操作,可提高生产效率,满足了小批量、多品类生产的需求。

DELTA并联机械手工作原理:
DELTA并联机械手的工作原理是基于并联结构学和运动学原理,通过精确控制每个分支的运动,实现末端执行器的快速、准确稳定的运动。控制方式通常采用运动控制器和伺服电机,通过实时计算和调整每个分支的运动轨迹,实现所需的工作效果。

正运动技术解决方案:
正运动技术根据市场需求,开发了基于VPLC系列视觉运动控制一体机和RTFuse视觉系统所拓展的DELTA柔振上下料专用系统,实现即插即用一站式解决方案,满足市场对灵活供料的需求,可克服传统供料方式的局限,实现了快速物料切换和配置工艺,提升兼容性。
- 专用柔振上料工艺系统,操作简单易理解,可定制界面与品牌logo;
- 系统支持单/双相机,单相机识别物料,双相机二次纠偏;
- 重复定位精度高、超高速拾取物料,单次节拍可达0.39s;
- 软硬件集成度高:VPLC532E控制器集成DELTA并联机械手控制、机器视觉、工控机、输入输出控制于一体,替代传统的机器人电柜箱、工控机、PLC等。

◆基于VPLC系列视觉运动控制一体机和RTFuse视觉系统也可应用于桌面式DELTA的小范围高速抓取或传送带DELTA的同步抓取与放置等应用。
01 机器视觉运动控制一体机在DELTA并联机械手视觉上下料应用
DELTA柔振上下料系统
正运动DELTA视觉上下料解决方案设计
- 24DI:启动/复位/停止按钮、气压检测、柔振盘信号等;
- 12DO:下相机飞拍、供料器、破/吸真空、三色灯蜂鸣器等;
- EtherCAT接口:接EtherCAT总线驱动器,控制DELTA并联机械手;
- 4路单端脉冲输出:接步进/脉冲驱动器、编码器轴;
- EtherNET接口:千兆网口,接支持Gige协议的面阵相机,实现视觉定位、纠偏应用。
运动控制与机器视觉实现过程
(1)机器视觉
上相机首先对柔振盘进行视觉拍照定位,DELTA并联机械手获取视觉定位数据去柔振盘内进行取料摆盘或编带上料。(对于精度要求较高的产品也可以增加下相机,柔振盘取料后在下相机进行飞拍二次纠偏)
视觉定位主要用到形状匹配功能,通过预设的形状、尺寸、Mark点等特征,实现目标物料的匹配定位。通过坐标系校准,将物料的世界坐标传送给DELTA并联机械手。

视觉参数设置
(2)运动控制
供料器将零散物料放入柔性振动盘,控制器通过IO信号触发振动盘进行振动散开,使物料在盘内均匀分布。每次振动后,DELTA并联机械手根据视觉系统提供的定位数据,沿预设路径移动,依次拾取物料并放置到指定位置(用户可快速示教拾取、放置、拍摄等运动轨迹)。若当前无可抓取的物料,系统会继续控制振动盘振动,直至出现可抓取的物料,并依次循环抓取至料盘摆满。

动作轨迹设置

运动模式类型
DELTA视觉上下料系统工艺流程

方案核心优势
- 技术门槛低:拖拽式中文组态视觉,应用工程师经过简单培训可轻松上手;
- 项目开发周期快:成熟的视觉机械手柔振工艺系统,减少用户开发时间成本;
- 软硬件集成性强:集成EtherCAT总线、脉冲混合控制,机器视觉、运动控制、集软硬于一体易于设备调试与排除问题;
- 降低企业用人成本:一人即可调试设备的运动控制、视觉、IO逻辑控制等,解决工程人员流失、用人成本高等问题;
- 柔性化生产:系统可保存多个物料的视觉和运控配置程序,一键完成工艺包切换。可灵活处理不同尺寸和形状的工件,无需频繁更换硬件,降低产线停机时间。

DELTA柔振上下料系统主界面
解决方案硬件配置

02 VPLC532E机器视觉运动控制一体机
VPLC532E机器视觉运动控制一体机是一款基于Linux系统的EtherCAT总线视觉运动控制器,可脱机运行,内置了丰富的视觉和运动控制功能,大幅简化视觉与运控项目的配置流程,核内数据交互快,可显著降低时间和成本投入。VPLC532E机器视觉运动控制一体机的安装与拆卸过程便捷,占地空间小,还能与其它控制单元部件(如伺服驱动器、传感器、编码器、控制阀等)无缝集成,提供一个完整端到端的视觉运动控制解决方案。

VPLC532E机器视觉运动控制一体机,本身最多支持32轴,支持24+6数字输入,12+6数字输出,4路高速锁存输入,4路高速PWM和PSO硬件输出,自带6路高速脉冲轴+编码器反馈,速度可达10M。
03 RTFuse视觉柔振上下料系统

正运动针对市场需求,特此基于VPLC系列的视觉运动控制一体机开发了RTFuse视觉柔振上下料解决方案,通过点位示教与RTFuse快组态的结合,实现一站式、快速开发上下料设备,有效缩短项目周期,操作员通过简单调整视觉、运动控制功能模块参数,即可在最短时间内完成物料转换,实现高速高精的机械手柔性上下料。
▌相机支持
支持市面上大部分主流相机,支持4个相机并行采集、视觉飞拍。
▌快速配置
机械手、轴组、振动盘、相机和矩阵料盘、工具参数。
▌示教功能
提供取料、飞拍及放料路径等多个点位的一键示教功能。
▌坐标校准
支持相机标定,包括修改XY坐标方向和世界坐标位置补正。
▌走位标定
通过示教好的运动点位,一键即可完成自动标定。
▌系统切换
可切换至RTfuse快组态系统,实现视觉检测流程。
▌可视化界面
界面友好,便于用户数据监控,实时显示使能状态、回原状态、定位数量和摆放计数等。
▌支持机械手类型
4轴模组、SCARA机械手、DELTA并联机械手、直角坐标机械手、6关节等
相关文章:
机器视觉运动控制一体机在DELTA并联机械手视觉上下料应用
市场应用背景 DELTA并联机械手是由三个相同的支链所组成,每个支链包含一个转动关节和一个移动关节,具有结构紧凑、占地面积小、高速高灵活性等特点,可在有限的空间内进行高效的作业,广泛应用于柔性上下料、包装、分拣、装配等需要…...

RHCE-web篇
一.web服务器 Web 服务器是一种软件或硬件系统,用于接收、处理和响应来自客户端(通常是浏览器)的 HTTP 请求。它的主要功能是存储和提供网站内容,比如 HTML 页面、图像、视频等。 Web 服务器的主要功能 处理请求…...

Java - 人工智能;SpringAI
一、人工智能(Artificial Intelligence,缩写为AI) 人工智能(Artificial Intelligence,缩写为AI)是一门新的技术科学,旨在开发、研究用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统…...
MFC开发,给对话框添加定时器
定时器简介 定时器的主要功能是设置以毫秒为单位的定时周期,然后进行连续定时或单次定时。 定时器是用于设置有规律的去触发某种动作所用的,这种场景也是软件中经常可以用到的,比如用户设置规定时间推送提示的功能,又比如程序定…...
LED灯珠:技术、类型与选择指南
目录 1. LED灯珠的类型 2. LED灯珠技术 3. 如何选择LED灯珠 4. 相关案例和使用情况 5. 结论 LED(Light Emitting Diode)灯珠是一种半导体发光器件,通过电流在固体半导体中流动时,其工作原理是电子与空穴的结合,通过…...

C语言二刷
const #include<stdio.h> int main() {const int amount 100;int price 0;scanf("%d", &price);int change amount - price;printf("找您%d元\n", change);return 0; } 浮点数类型 输入输出float(单精度)%f%f %l…...
C++模块化程序设计举例
1、模块1 在main.cpp里输入下面的程序: #include "stdio.h" //使能printf()函数 #include <stdlib.h> //使能exit(); #include "Static_Variable.h" //argc 是指命令行输入参数的个数; //argv[]存储了所有的命令行参数; //argv[0]通常…...
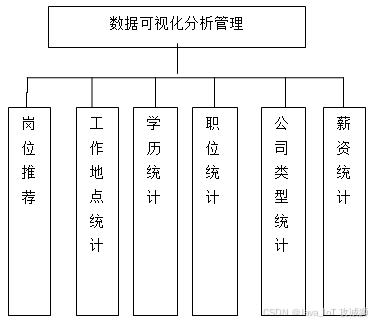
毕业设计选题:基于Python的招聘信息爬取和可视化平台
开发语言:Python框架:djangoPython版本:python3.7.7数据库:mysql 5.7数据库工具:Navicat11开发软件:PyCharm 系统展示 采集的数据列表 招聘数据大屏 摘要 本系统通过对网络爬虫的分析,研究智…...

机器人学习仿真框架
机器人学习仿真框架一般包含(自底向上): 3D仿真物理引擎:对现实世界的模拟仿真机器人仿真平台:用于搭建工作场景,以实现agent与环境的交互学习学习算法框架集合:不同的策略学习算法的实现算法测…...

力扣每日一题打卡 3180. 执行操作可获得的最大总奖励 I
给你一个整数数组 rewardValues,长度为 n,代表奖励的值。 最初,你的总奖励 x 为 0,所有下标都是 未标记 的。你可以执行以下操作 任意次 : 从区间 [0, n - 1] 中选择一个 未标记 的下标 i。如果 rewardValues[i] 大于…...
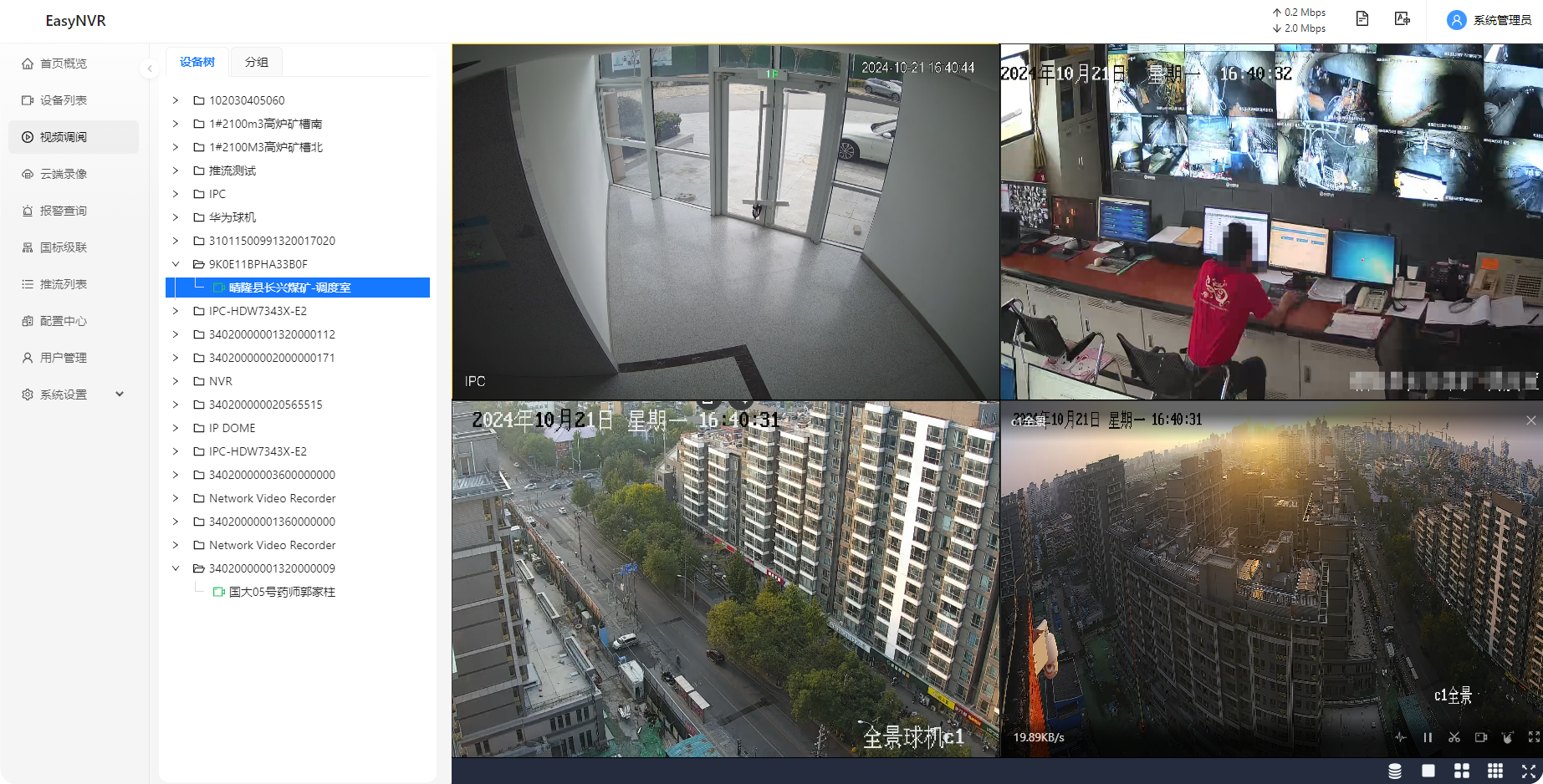
NVR录像机汇聚管理EasyNVR多品牌NVR管理工具/设备视频报警功能详解
在科技日新月异的今天,视频监控系统作为现代社会的“第三只眼”,正以前所未有的方式深刻影响着我们的生活与社会结构。从公共场所的安全监控到个人生活的记录分享,视频监控系统以其独特的视角和功能,为社会带来了诸多好处…...

springboot073车辆管理系统设计与实现(论文+源码)_kaic.zip
车辆管理系统 摘要 随着信息技术在管理上越来越深入而广泛的应用,管理信息系统的实施在技术上已逐步成熟。本文介绍了车辆管理系统的开发全过程。通过分析车辆管理系统管理的不足,创建了一个计算机管理车辆管理系统的方案。文章介绍了车辆管理系统的系统…...

2024.10月22日- MySql的 补充知识点
1、什么是数据库事务? 数据库事务: 是数据库管理系统执行过程中的一个逻辑单位,由一个有限的数据库操作序列构成,这些操作要么全部执行,要么全部不执行,是一个不可分割的工作单位。 2、Mysql事务的四大特性是什么? …...

Java中的对象——生命周期详解
1. 对象的创建 1.1 使用 new 关键字 执行过程:当使用 new 关键字创建对象时,JVM 会为新对象在堆内存中分配一块空间,并调用对应的构造器来初始化对象。 示例代码: MyClass obj new MyClass(); 内存变化:JVM 在堆…...
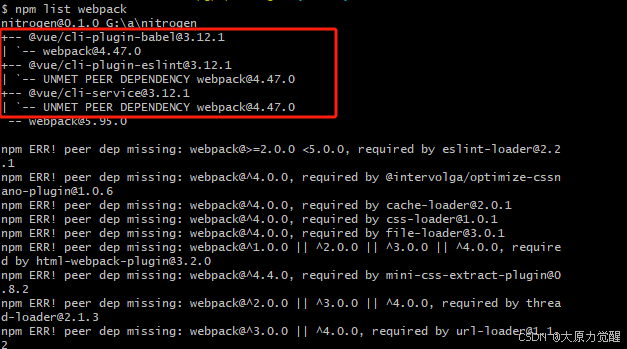
vue文件报Cannot find module ‘webpack/lib/RuleSet‘错误处理
检查 Node.js 版本:这个问题可能与 Node.js 的版本有关。你可以尝试将 Node.js 的版本切换到 12 或更低。如果没有安装 nvm(Node Version Manager),可以通过以下命令安装: curl -o- https://raw.githubusercontent.co…...
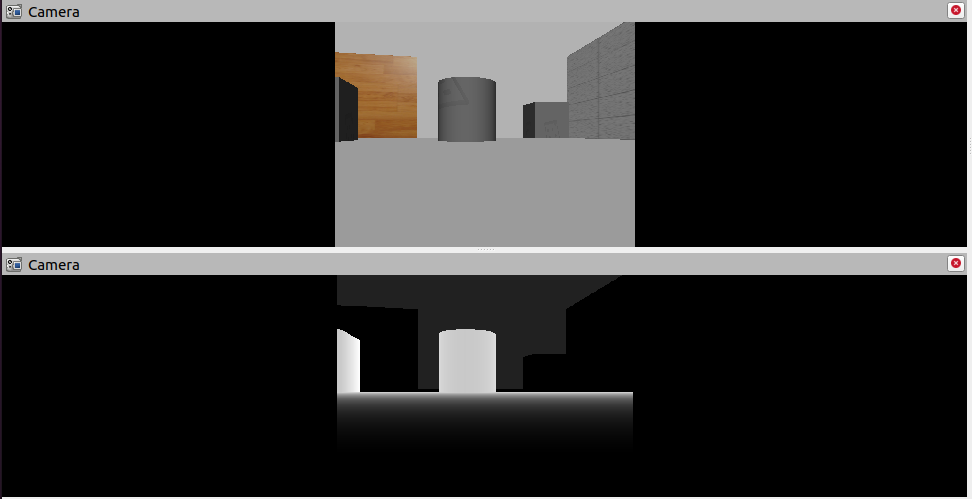
第 6 章 机器人系统仿真
对于ROS新手而言,可能会有疑问:学习机器人操作系统,实体机器人是必须的吗?答案是否定的,机器人一般价格不菲,为了降低机器人学习、调试成本,在ROS中提供了系统的机器人仿真实现,通过仿真&#x…...

爬虫——scrapy的基本使用
一,scrapy的概念和流程 1. scrapy的概念 Scrapy是一个Python编写的开源网络爬虫框架。它是一个被设计用于爬取网络数据、提取结构性数据的框架。 框架就是把之前简单的操作抽象成一套系统,这样我们在使用框架的时候,它会自动的帮我们完成很…...
聚类分析算法——K-means聚类 详解
K-means 聚类是一种常用的基于距离的聚类算法,旨在将数据集划分为 个簇。算法的目标是最小化簇内的点到簇中心的距离总和。下面,我们将从 K-means 的底层原理、算法步骤、数学基础、距离度量方法、参数选择、优缺点 和 源代码实现 等角度进行详细解析。…...
【Sublime Text】设置中文 最新最详细
在编程的艺术世界里,代码和灵感需要寻找到最佳的交融点,才能打造出令人为之惊叹的作品。而在这座秋知叶i博客的殿堂里,我们将共同追寻这种完美结合,为未来的世界留下属于我们的独特印记。 【Sublime Text】设置中文 最新最详细 开…...
C++学习路线(二十四)
静态成员函数 类的静态方法: 1.可以直接通过类来访问【更常用】,也可以通过对象(实例)来访问。 2.在类的静态方法中,不能访问普通数据成员和普通成员函数(对象的数据成员和成员函数) 1)静态数据成员 可以直接访问“静态数据成员”对象的成…...

番茄小说下载器完整指南:如何快速搭建个人离线图书馆
番茄小说下载器完整指南:如何快速搭建个人离线图书馆 【免费下载链接】Tomato-Novel-Downloader 番茄小说下载器不精简版 项目地址: https://gitcode.com/gh_mirrors/to/Tomato-Novel-Downloader 你是否厌倦了每次阅读小说都要依赖网络?是否想要将…...

python在生活中的实际应用
1.Python的简洁语法适合教学编程基础。科研中,NumPy和SciPy用于数值模拟,SymPy进行符号计算,例如推导物理公式或分析实验数据曲线。2.Pygame库允许快速开发2D游戏或交互式应用。教育领域常用Python编写数学模拟程序(如分形生成&am…...

AugGPT:基于上下文感知的AI代码生成器设计与实现
1. 项目概述:当代码生成器遇上“增强现实”如果你和我一样,长期在代码的海洋里“游泳”,那么对GitHub上琳琅满目的代码生成工具一定不陌生。从早期的代码片段补全,到如今能生成完整函数甚至模块的AI助手,它们确实极大地…...

ARM ETE Trace技术:非侵入式调试与TRCEVENTCTL寄存器详解
1. ARM ETE Trace技术概述在嵌入式系统开发中,调试和性能分析一直是极具挑战性的任务。传统的断点调试方式会中断程序执行流,难以捕捉实时性问题。ARM架构下的ETE(Embedded Trace Extension)技术通过非侵入式的指令跟踪机制,为开发者提供了强…...

RocketMQ 入门到原理实战全讲明白了!第二章
文章目录1、客户端消息确认机制2、广播模式详解3、消息过滤机制4、顺序消息机制5、延迟消息、批量消息6、事务消息机制7、ACL 权限控制机制8、SpringBoot 整合 RocketMQ9、RocketMQ 客户端注意事项10、MQ 如何保证消息不丢失11、MQ 如何保证消息的顺序性12、MQ 如何保证消息的幂…...

基于LLM的GitHub智能助手:用自然语言驱动自动化工作流
1. 项目概述:当GitHub遇到AI,自动化工作流的新范式 最近在折腾一个挺有意思的开源项目,叫 MPK2004/github-agent 。乍一看名字,你可能会想,这又是一个基于GitHub API的机器人或者自动化脚本吧?没错&#…...

使用 SaySo 语音输入提升内容创作效率,从灵感到初稿的工作流实践
作为一个日更科技内容创作者,我每天都需要完成大量文字输出。包括工具测评、产品体验、干货笔记、技术趋势观察,以及一些观点类内容。长期写下来之后,我发现真正消耗时间的,不只是选题和思考,还有一个很容易被忽略的环…...

RDP Wrapper Library技术架构深度解析
RDP Wrapper Library技术架构深度解析 【免费下载链接】rdpwrap RDP Wrapper Library 项目地址: https://gitcode.com/gh_mirrors/rd/rdpwrap RDP Wrapper Library是一个Windows系统服务层中间件,通过在服务控制管理器与终端服务之间建立拦截层,为…...

《2026 年生成电商主图最好的 5 个软件,实测后我只留了这几款》
做电商 5 年,从淘宝做到亚马逊,我用过的主图设计工具不下 20 款。2026 年 AI 工具爆发后,很多老软件其实已经被淘汰了。这篇把我目前还在用的 5 款整理出来,都是真金白银测过的,不是广告。先说结论:如果你只看一句话——想一键出主图详情页全套:选潮际好麦只做白底主图:选佐糖要…...

iCloud 会保留多少份备份?
“iCloud 会保留多少份备份?” 是很多想要保障数据安全的 iPhone、iPad 用户常问的问题。苹果的云存储服务 iCloud 通常会保存多份设备备份,确保你在数据丢失或损坏时能访问并恢复数据。iCloud 备份的具体份数取决于可用存储空间、使用习惯等因素。 本文…...