C++基于opencv的视频质量检测--图像清晰度检测
文章目录
- 0.引言
- 1. 原始算法实现
- 2. 优化思路
- 3. 优化后的代码
- 4. 代码详细解读
0.引言
视频质量图像清晰度检测已在C++基于opencv4的视频质量检测中有所介绍,本文将详细介绍其优化版本。
1. 原始算法实现
原始代码:
double sharpnessDetect(const cv::Mat& srcImg) {const int kGaussianSize = 3; // 高斯模糊的核大小cv::Mat grayImg;if (srcImg.channels() != 1) {cv::cvtColor(srcImg, grayImg, cv::COLOR_BGR2GRAY);} else {grayImg = srcImg;}cv::Mat blurredImg;cv::GaussianBlur(grayImg, blurredImg, cv::Size(kGaussianSize, kGaussianSize), 0);uint64_t sumFver = 0;uint64_t sumFhor = 0;uint64_t sumVver = 0;uint64_t sumVhor = 0;double blurFactor = 0.0;for (int r = 0; r < grayImg.rows; ++r) {for (int c = 0; c < grayImg.cols; ++c) {uint64_t diffFver = 0;uint64_t diffFhor = 0;uint64_t diffBver = 0;uint64_t diffBhor = 0;if (r != 0) {diffFver = static_cast<uint64_t>(std::abs(grayImg.at<uchar>(r, c) - grayImg.at<uchar>(r - 1, c)));}if (c != 0) {diffFhor = static_cast<uint64_t>(std::abs(grayImg.at<uchar>(r, c) - grayImg.at<uchar>(r, c - 1)));}if (r != 0) {diffBver = static_cast<uint64_t>(std::abs(blurredImg.at<uchar>(r, c) - blurredImg.at<uchar>(r - 1, c)));}if (c != 0) {diffBhor = static_cast<uint64_t>(std::abs(blurredImg.at<uchar>(r, c) - blurredImg.at<uchar>(r, c - 1)));}uint64_t verDiff = (diffFver > diffBver) ? (diffFver - diffBver) : 0;uint64_t horDiff = (diffFhor > diffBhor) ? (diffFhor - diffBhor) : 0;sumFver += diffFver;sumFhor += diffFhor;sumVver += verDiff;sumVhor += horDiff;}}double bFver = (static_cast<double>(sumFver - sumVver)) / (static_cast<double>(sumFver) + 1.0);double bFhor = (static_cast<double>(sumFhor - sumVhor)) / (static_cast<double>(sumFhor) + 1.0);blurFactor = (bFver > bFhor) ? bFver : bFhor;return 1.0 - blurFactor;
}
以下是原始代码的主要步骤:
- 图像预处理:将输入图像转换为灰度图。
- 高斯模糊:对灰度图像进行高斯模糊处理,得到模糊图像。
- 梯度计算:通过遍历每个像素,计算原始图像和模糊图像在垂直和水平方向上的梯度差异。
- 模糊因子计算:根据梯度差异,计算模糊因子,进而评估图像的清晰度。
存在的问题:
- 效率低下:使用嵌套的
for循环遍历每个像素,手动计算梯度,处理大尺寸图像时效率较低。
2. 优化思路
为了解决上述问题,我们对原始算法进行了以下优化:
- 向量化操作,避免显式循环:利用OpenCV的矩阵运算和函数,对整个图像进行批量处理,提高计算效率。
- 使用Sobel算子计算梯度:Sobel算子是常用的梯度计算方法,能够有效地提取图像的边缘信息。
3. 优化后的代码
以下是优化后的sharpnessDetect函数:
double sharpnessDetect(const cv::Mat& srcImg) {const int kGaussianSize = 3; // 高斯模糊的核大小cv::Mat grayImg;if (srcImg.channels() != 1) {cv::cvtColor(srcImg, grayImg, cv::COLOR_BGR2GRAY);} else {grayImg = srcImg;}// 对灰度图像进行高斯模糊cv::Mat blurredImg;cv::GaussianBlur(grayImg, blurredImg, cv::Size(kGaussianSize, kGaussianSize), 0);// 计算原始图像和模糊图像的梯度cv::Mat gradXOrig, gradYOrig;cv::Mat gradXBlur, gradYBlur;cv::Sobel(grayImg, gradXOrig, CV_64F, 1, 0, 3);cv::Sobel(grayImg, gradYOrig, CV_64F, 0, 1, 3);cv::Sobel(blurredImg, gradXBlur, CV_64F, 1, 0, 3);cv::Sobel(blurredImg, gradYBlur, CV_64F, 0, 1, 3);// 计算梯度的绝对值cv::Mat absGradXOrig = cv::abs(gradXOrig);cv::Mat absGradYOrig = cv::abs(gradYOrig);cv::Mat absGradXBlur = cv::abs(gradXBlur);cv::Mat absGradYBlur = cv::abs(gradYBlur);// 计算梯度差的正值部分cv::Mat diffX = absGradXOrig - absGradXBlur;cv::Mat diffY = absGradYOrig - absGradYBlur;diffX = cv::max(diffX, 0);diffY = cv::max(diffY, 0);// 计算梯度的总和double sumFhor = cv::sum(absGradXOrig)[0];double sumFver = cv::sum(absGradYOrig)[0];// 计算梯度差的总和double sumVhor = cv::sum(diffX)[0];double sumVver = cv::sum(diffY)[0];// 计算模糊因子double bFver = (sumFver - sumVver) / (sumFver + 1e-6);double bFhor = (sumFhor - sumVhor) / (sumFhor + 1e-6);double blurFactor = std::max(bFver, bFhor);// 返回清晰度得分return 1.0 - blurFactor;
}
4. 代码详细解读
流程说明:
- 开始:函数
sharpnessDetect开始执行。 - 检查图像通道数:判断输入图像是否为灰度图。
- 如果不是,转换为灰度图。
- 如果是,跳过转换。
- 高斯模糊:对灰度图像进行高斯模糊处理,得到模糊图像。
- 计算梯度:使用Sobel算子计算原始图像和模糊图像在x和y方向的梯度。
- 计算梯度的绝对值:对梯度矩阵取绝对值。
- 计算梯度差的正值部分:计算原始梯度和模糊梯度之间的差异,保留正值部分。
- 计算梯度的总和:分别计算原始梯度和差异梯度的总和。
- 计算模糊因子:根据梯度总和计算模糊因子。
- 返回结果:根据模糊因子计算清晰度得分,返回结果。
优化细节解读
-
使用Sobel算子计算梯度:
cv::Sobel函数可以高效地计算图像在x和y方向的梯度,避免了手动计算相邻像素差异的繁琐过程。 -
向量化操作:通过
cv::abs、cv::sum等函数,对整个矩阵进行操作,充分利用了底层的优化和并行计算能力。 -
梯度差的正值部分:使用
cv::max函数,将梯度差中的负值置零,保留正值部分,与原始代码的逻辑一致。 -
防止除零错误:在计算模糊因子时,分母加上了一个很小的值
1e-6,防止除以零的情况。 -
数据类型选择:使用
CV_64F(双精度浮点型)确保计算的精度,避免数据溢出和精度损失。
相关文章:

C++基于opencv的视频质量检测--图像清晰度检测
文章目录 0.引言1. 原始算法实现2. 优化思路3. 优化后的代码4. 代码详细解读 0.引言 视频质量图像清晰度检测已在C基于opencv4的视频质量检测中有所介绍,本文将详细介绍其优化版本。 1. 原始算法实现 原始代码: double sharpnessDetect(const cv::Ma…...

力扣11.1
2518. 好分区的数目 给你一个正整数数组 nums 和一个整数 k 。 分区 的定义是:将数组划分成两个有序的 组 ,并满足每个元素 恰好 存在于 某一个 组中。如果分区中每个组的元素和都大于等于 k ,则认为分区是一个好分区。 返回 不同 的好分区…...

打印室预约系统|基于java和小程序的打印室预约系统设计与实现(源码+数据库+文档)
打印室预约系统 目录 基于java和小程序的打印室预约系统设计与实现 一、前言 二、系统设计 三、系统功能设计 四、数据库设计 五、核心代码 六、论文参考 七、最新计算机毕设选题推荐 八、源码获取: 博主介绍:✌️大厂码农|毕设布道师&#x…...

操作系统-多线程案例
一、单例模式(是一种设计模式) 设计模式有很多种,不同的语法中也有不同的设计模式 单例 单个实例(对象) 某个类,在一个进程中,只应该创建出一个实例,(原则上不该有多个ÿ…...
什么是FUSE用户态文件系统
零. 文件系统 1. 为什么要有文件系统 文件系统是操作系统中管理文件和目录的一种机制。它提供了组织、存储、检索和更新文件的方法,主要如下: 数据组织:文件系统将数据组织成文件和目录,使用户能够更方便地管理和查找文件。每个…...
)
[每日一练]销售分析(通过数据的0/1转换进行是否存在的查询)
#该题目来源于力扣: 1083. 销售分析 II - 力扣(LeetCode) 题目要求: 表:Product----------------------- | Column Name | Type | ----------------------- | product_id | int | | product_name | varch…...

.NET Core WebApi第7讲:项目的发布与部署
一、理解 前端跟后端拿数据,然后在前端页面中展示,就是我们要完成的事情。 把前端跟后端开发好之后,我们需要落地部署,这个时候就需要一个服务器。 服务器就是一台电脑,只要windows里面有一个叫IIS的管理器。 二、项目…...

【python 将数据写入csv文件】正确方式
data [{username: jack, password: 1234}, ……]# 保存为CSV文件 with open(IP_output.csv, w, newline, encodingutf-8) as file:fieldnames [username, password]writer csv.DictWriter(file, fieldnamesfieldnames, quotingcsv.QUOTE_NONE)writer.writeheader() # 写入列…...

OpenCV4.8 开发实战系列专栏之 10 - 像素值统计
大家好,欢迎大家学习OpenCV4.8 开发实战专栏,长期更新,不断分享源码。 专栏代码全部基于C++ 与Python双语演示,专栏答疑群 请联系微信 OpenCVXueTang_Asst 本文关键知识点:像素值统计 最小(min)最大(max)均值(mean)标准方差(standard deviation)API知识点 最大最小值min…...

pandas计算相关性并画热力图
实现这个功能有很多方法,但是下面的方法还是比较优雅的: cols ["ASSET", "HOUSES", "INCOME", "DEBT", "EDUC"] corr df[cols].corr() corr.style.background_gradient(axisNone)讲解: …...
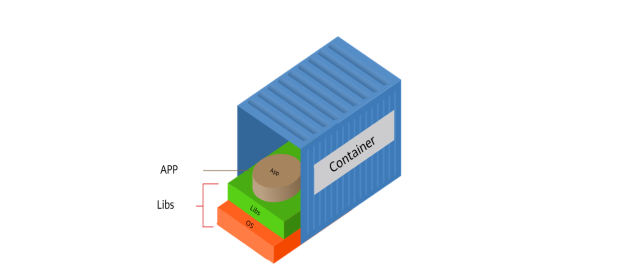
初始Docker
概述: 容器,作为云原生技术的重要组成部分,与虚拟机一样,均属于虚拟化技术的范畴。然而,容器技术以其独特的优势,在虚拟化领域中脱颖而出。与虚拟机不同,容器能够摆脱操作系统的束缚࿰…...

Redis-概念、安装、基本配置
文章目录 一、Redis及Redis集群概念、分布式系统概念一-1 Redis是什么一-2 什么是分布式系统、分布式缓存一-3 什么是Redis集群、实现Redis集群的方法有哪些、这些跟Redis的sentinel和cluster有什么关系一-4 Redis的库一-5 Redis中的Key与Value是什么、如何进行操作使用它们添加…...

qt QPlainTextEdit详解
QPlainTextEdit是一个功能强大、易于使用的纯文本编辑器/查看器。它使用与QTextEdit相同的技术和概念,但是为纯文本的处理进行了优化,因此更适合处理大型纯文本文档。QPlainTextEdit不提供富文本编辑功能,如字体、颜色、大小等的格式化&#…...

【机器学习】23. 聚类-GMM: Gaussian Mixture Model
1. 定义和假设 定义:probabilistic clustering(model-base) 假设:数据服从正态分布 2. 算法内容 我们假设数据是由k个高斯(正态)分布混合生成的。每个分布有2个参数:μ和σ。 一个分布对应一…...

深度探索C++对象模型
文章目录 前言一、关于对象C对象模型 二、构造函数实例分析 拷贝构造函数程序转化语意学(Program Transformation Semantics)成员初始化列表 三、数据语义学(The Semantics of Data)数据存取多种继承情况讨论仅单一继承加上虚函数多重继承虚拟继承 Pointer to Data Members 四、…...
电脑怎么设置开机密码:保障个人信息安全的第一步
在数字化时代,个人信息的安全至关重要。电脑作为我们日常工作和生活中不可或缺的设备,存储了大量的私人数据和敏感信息。为了防止未经授权的访问,设置开机密码是保护个人隐私和信息安全的基本措施之一。本文将详细介绍如何在不同操作系统下为…...

MybatisPlus入门(六)MybatisPlus-null值处理
一、MybatisPlus-null值处理 1.1)问题引入: 在查询中遇到如下情况,有部分筛选条件没有值,如商品价格有最大值和最小值,商品价格部分时候没有值。 1.2)解决办法: 步骤一:新建查询实…...

红帽认证有必要考吗?这四大人群推荐考取!
红帽认证(Red Hat Certification)作为全球公认的Linux技能认证,对于某些特定人群来说,考取这一认证无疑是一个明智的选择。本文将探讨红帽认证的必要性,并为四类人群提供考取红帽认证的建议。 1. IT专业人士 对于IT专业人士来说࿰…...
基于SSM+微信小程序的社团登录管理系统(社团1)
👉文末查看项目功能视频演示获取源码sql脚本视频导入教程视频 1 、功能描述 2、项目技术 3、开发环境 4、功能介绍 1、项目介绍 基于SSM微信小程序的社团登录管理系统实现了管理员及社团、用户。 1、管理员实现了首页、用户管理、社团管理、社团信息管理、社…...

html中cookie如何存储
在HTML中,可以使用JavaScript来创建、读取和删除cookie。以下是创建和读取cookie的基本示例: 创建cookie: function setCookie(name, value, daysToLive) { var cookie name "" encodeURIComponent(value); if (typeof daysToLive …...

打通飞书与GitLab:基于Webhook的事件通知与精准@实践指南
1. 为什么需要打通飞书与GitLab的通知系统 在软件开发团队中,代码仓库的每一次变更都可能影响整个项目进度。传统的做法是开发人员手动在群里相关同事,或者依赖邮件通知,这种方式效率低下且容易遗漏重要信息。我曾经参与过一个跨时区协作项目…...

VideoDownloadHelper:三分钟掌握浏览器视频下载技巧,告别观看限制
VideoDownloadHelper:三分钟掌握浏览器视频下载技巧,告别观看限制 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 你是…...

集成SERDES+RGMII双接口:BCM54616SC0KFBG在背板与光纤应用中的灵活连接方案
BCM54616SC0KFBG:集成 SERDES 的低功耗单口千兆以太网 PHY在数据中心的服务器接入、企业级交换机上行链路以及工业自动化控制系统中,物理层芯片是实现网络通信的基石。随着网络设备向高密度、低功耗演进,传统的以太网 PHY 面临连接灵活性受限…...
)
Perplexity环境新闻检索失效真相(2024最新API响应延迟根因分析)
更多请点击: https://kaifayun.com 第一章:Perplexity环境新闻搜索 Perplexity 是一款基于大语言模型的实时信息检索工具,其核心优势在于融合权威信源与上下文感知能力,特别适用于需要高时效性与高可信度的新闻类查询场景。在该环…...

基础设施监控:全面监控基础设施状态
基础设施监控:全面监控基础设施状态 一、基础设施监控概述 1.1 基础设施监控的定义 基础设施监控是指对IT基础设施的状态、性能和可用性进行持续监控和管理的过程。它包括服务器、网络、存储和应用等方面的监控,确保基础设施的稳定运行和高效利用。 1.2 …...

北京理工大学:数据中心节能降碳之算电协同——背景、技术、实践和展望 2026
这份由北京理工大学 2026 年初发布的《数据中心节能降碳之算电协同:背景、技术、实践和展望》报告,围绕算电协同,从背景、技术、实践、展望四方面系统分析,核心是推动算力与电力、热力深度融合,助力数据中心节能降碳、…...

如何在PowerPoint中高效使用LaTeX进行数学公式排版
如何在PowerPoint中高效使用LaTeX进行数学公式排版 【免费下载链接】latex-ppt Use LaTeX in PowerPoint 项目地址: https://gitcode.com/gh_mirrors/la/latex-ppt 对于需要制作学术演示文稿的科研人员、教师和学生来说,在PowerPoint中排版复杂的数学公式一直…...

2026年想快速提分?邵阳这些高复学校或许能帮你实现梦想!
高考失利并不意味着人生就此止步,复读是很多考生重新冲刺梦想的选择。在邵阳,有不少优秀的高复学校,今天就重点为大家介绍邵阳湘郡铭志学校高复部,同时也会提及其他一些知名高复学校,帮助大家在选择时进行对比。一、解…...

RimSort终极指南:3步轻松管理你的RimWorld模组库
RimSort终极指南:3步轻松管理你的RimWorld模组库 【免费下载链接】RimSort RimSort is an open source mod manager for the video game RimWorld. There is support for Linux, Mac, and Windows, built from the ground up to be a reliable, community-managed a…...

G-Helper:华硕笔记本轻量化控制工具完整指南
G-Helper:华硕笔记本轻量化控制工具完整指南 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook, Expertbook,…...