DDR2 SDRAM(五)初始化
因为DDR2本质上只是更高级的一种SRAM,底层操作原理和SRAM是一样的,所以很多基础的东西就不再赘述了。
一、原理
在初始化之前,DDR2芯片需要先上电,芯片有多个需要提供的电压,其大小和顺序也有要求,这部分算是物理层的,在此不作研究。
在上电稳定之后,还需要等待时钟稳定才能进行操作。
时钟稳定后,开始第一轮对LMR的操作,配置四个(E)MRS,实现激活DLL和DLL复位的功能。
随后进行至少两次自动刷新,再开始第二轮对LMR的操作,配置四个(E)MRS,实现停止DLL复位和退出OCD的功能。
稳定后即完成了初始化,DDR2可以正常工作。
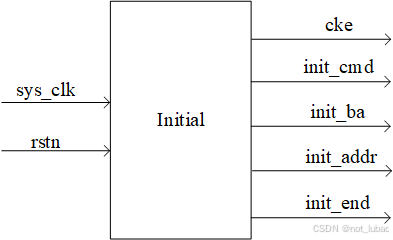
二、模块框图和接口
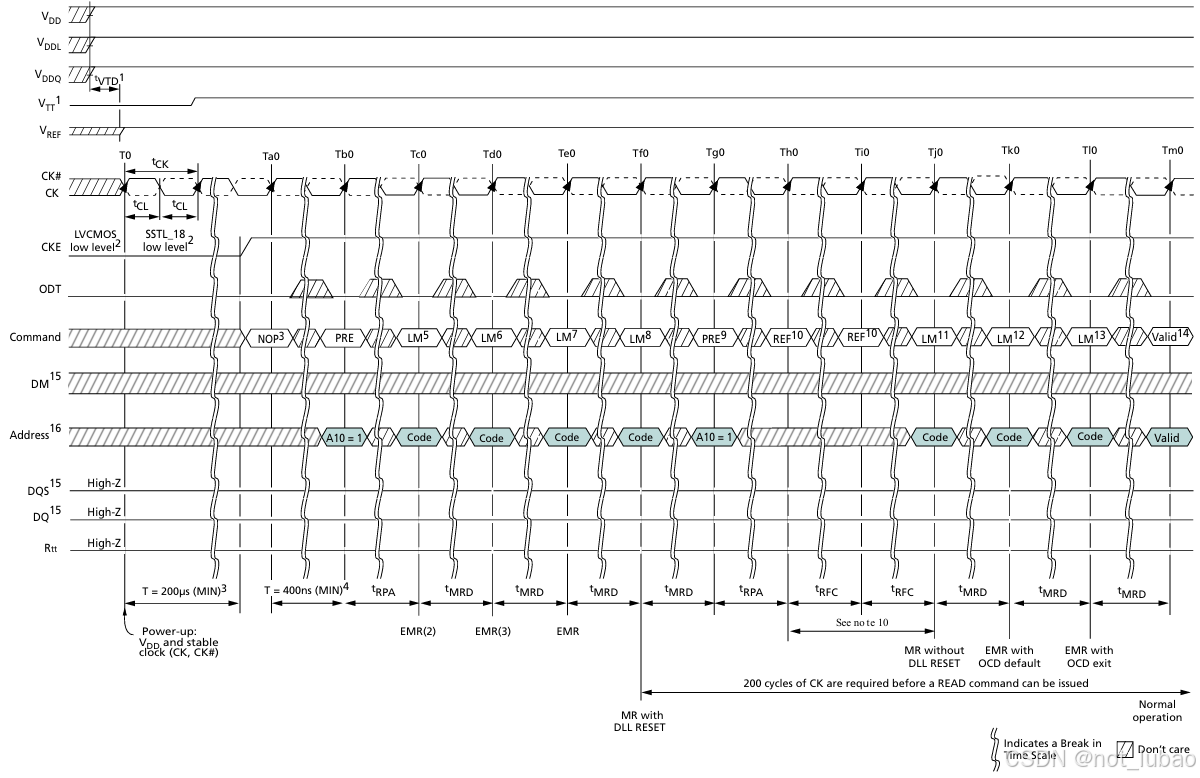
三、时序图
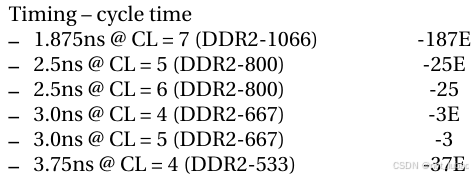
注意,这些延迟的具体值和数据速率(Data Rate)密切相关,即和串口时钟频率相关,在这里假设串口时钟频率为400MHz(即下图中的-25),那么一个周期就是T=2.5ns,延迟周期数将使用2.5ns计算。
假设容量为8Meg*16*4banks(512Gb),因此dq位宽为16,ba位宽为2,行addr位宽为13,列addr位宽为10。
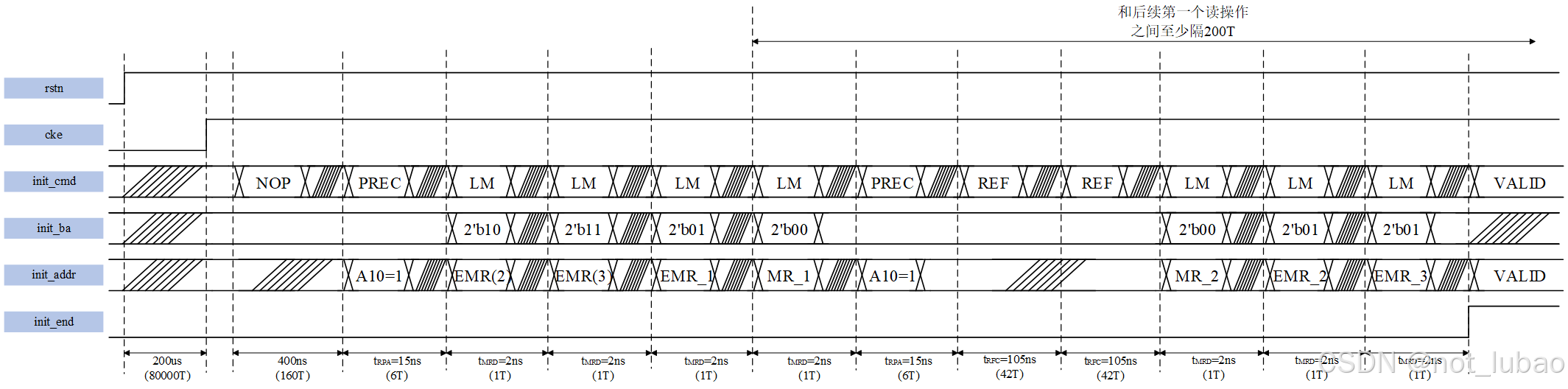
根据芯片手册的时序图,舍弃部分无用的信号,增添具体信号值,查阅手册得到准确的延时(延时部分内容太多,涉及到的都放在本文末尾),画出更清晰的时序图如下。
其中第三条之后的虚线为系统时钟sys_clk的上升沿,用于输出值的改变;输给DDR2的接口时钟clk&clk_n应当比sys_clk延迟半个周期,用于采样。
这里又遇到了如何生成sys_clk和clk&clk_n的问题,放在后文详述。(又挖坑了)
其中addr总线的具体值描述如下。
EMR(2):不用考虑高温自刷新的问题,全为0即可。
EMR(3):保留,全为0。
EMR_1:此处需要打开DLL功能,所以A0为0;还有两个参数需要关注,A3~A5和A7~A9。前者是关于AL的长度(详见DDR2 SDRAM(二)信号和时序-CSDN博客),后者是OCD校准,在这里为了简化,都设为0。另外,也去掉一些不必要的信号和接口,所以A10为1(关闭dqs_n),A11为0(关闭rdqs)。此处ODT必须禁用。
MR_1:此处需要将DLL复位,所以A8为1,其余全为0。注意复位后要至少200个周期才能读。
MR_2:此处需要停止DLL复位,所以A8为0;A0~A2是突发长度,设为011(8);A4~A6是CAS延迟,根据上文的假设,设为110(6);A9~A11是自动预充电的写恢复时间,本次设计中不打算加入此功能,只需要知道这个时间是tWR,可以通过查表得到,此处为了方便直接设为101(6)。
EMR_2:想要退出OCD校准,要先在此处设置DLL default,即A7~A9都为1。ODT就设为75Ω好了,所以A6为0,A2为1。
EMR_3:此处需要退出OCD校准,A7~A9都为0。
注意:为了提高代码的灵活性,以上提到的参数都应该使用parameter定义。
四、状态机
- 复位撤销后,开始计数,计数到80000时拉高cke并将init_amd设置为NOP。
- 计数到80000+160时,拉高A10选中所有bank,并将init_amd设置为PREC,等待tRPA。
- 将init_amd设置为LM,BA设为10,init_addr设为13’b0,等待tMRD。
- 将init_amd设置为LM,BA设为11,init_addr设为13’b0,等待tMRD。
- 将init_amd设置为LM,BA设为01,init_addr[10]设为1,其余为0,等待tMRD。
- 将init_amd设置为LM,BA设为00,init_addr[8]设为1,其余为0,等待tMRD。
- 拉高A10选中所有bank,并将init_amd设置为PREC,等待tRPA。
- 将init_amd设置为REF,等待tRFC。
- 将init_amd设置为REF,等待tRFC。
- 将init_amd设置为LM,BA设为00,init_addr[2:0]为011,init_addr[6:4]为110,init_addr[11:9]为101,其余为0,等待tMRD。
- 将init_amd设置为LM,BA设为01,init_addr[9:7]为111,init_addr[10]为1,init_addr[2]为1,其余为0,等待tMRD。
- 将init_amd设置为LM,BA设为01,init_addr[10]设为1,init_addr[2]为1,其余为0,等待tMRD。
- 初始化完成。
五、代码实现
/***************************************************************************************
作者:not_lubao
2024-11-1
×××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××*/// DDR2初始化模块,初始化步骤:上电--延时200us--拉高cke--延时400ns--预充电--寄存器配置--刷新n次--寄存器配置--完成module ddr2_init(
input sys_clk , //系统时钟信号100MHz
input rstn , //系统复位信号output cke , //时钟使能
output [1:0] init_ba , //Bank
output [3:0] init_cmd , //命令
output [12:0] init_addr , //地址
output init_end //初始化结束标志
);/***********************参数************************/
//状态机
parameter IDLE = 6'd0 ,WAIT_IDLE = 6'd1 ,CLK_EN = 6'd2 ,WAIT_CKE = 6'd3 ,P_CHAR = 6'd4 ,WAIT_PREC = 6'd5 ,LM_EMR2 = 6'd6 ,LM_EMR3 = 6'd7 ,LM_EMR_1 = 6'd8 ,LM_MR_1 = 6'd9 ,LM_MR_2 = 6'd10 ,LM_EMR_2 = 6'd11 ,LM_EMR_3 = 6'd12 ,WAIT_LM = 6'd13 ,AUTO_REF = 6'd14 ,WAIT_REF = 6'd15 ,WAIT_DLL_RST = 6'd16 ,END = 6'd17 ;//等待时间 比实际要求最小值多一个周期
parameter T_INIT = 17'd80000 , //上电后等待T_CKE = 17'd160 , //拉高cke后等待T_tRPA = 17'd6 , //充电后等待T_tMRD = 17'd1 , //配置寄存器后等待T_tRFC = 17'd42 , //刷新后等待T_DLL_RST = 17'd110 ; //拉高cke后等待(大于99)//指令
parameter LM = 4'b0000 ,REF = 4'b0001 ,PREC = 4'b0010 ,ACT = 4'b0011 ,WR = 4'b0100 ,RD = 4'b0101 ,NOP = 4'b0111 ;//自刷新次数
parameter REF_TIME = 4'd2 ;//模式寄存器的值
parameter EMR2 = 13'b0 , //不用考虑高温自刷新的问题,全为0EMR3 = 13'b0 , //保留EMR_1 = 13'b0_0010_0000_0000 , //[0]为0(打开DLL功能);[5:3](AL长度)和[9:7](OCD校准)都为0;[10]为1(关闭dqs_n),[11]为0(关闭rdqs);{[6],[2]}为01(ODT=75Ω)MR_1 = 13'b0_0000_1000_0000 , //[8]为1(DLL复位),其余全为0MR_2 = 13'b0_0101_0011_0011 , //[8]为0(停止DLL复位);[2:0]为011(突发长度8);[6:4]为110(CAS延迟6);[11:9]为101(自动预充电的写恢复时间6)EMR_2 = 13'b0_0011_1100_0010 , //[9:7]为111(OCD default);{[6],[2]}为01(ODT=75Ω)EMR_3 = 13'b0_0010_0000_0010 ; //[9:7]为000(退出OCD校准)/* 模式寄存器的具体值受芯片型号影响,以下仅做参考
MR[2:0] : 突发长度 4(010)或8(011)[3] : 突发类型 0(顺序)或1(插入)[6:4] : CAS延迟 010(2)到111(7),一般大于3[7] : 测试模式 0(正常工作)或1(测试)[8] : DLL复位 0(无效)或1(有效)[11:9] : 带自动预充电的写恢复时间 010(2)到111(7),一般大于2[12] : 活跃低功耗模式的退出时间 0(快退出 tXARD)或1(慢退出 tXARDS)EMR[0] : DLL功能 0(开启)或1(关闭)[1] : D.I.C 输出驱动阻抗 0(满强度)或1(降低强度){[6],[2]} : Rtt 00(无效)或01(75Ω)或10(150Ω)或11(50Ω)[5:3] : AL 额外延时 000(0)到110(6),111为保留[9:7] : OCD校准 000(退出)或001(驱动1)或010(驱动0)或100(调整)或111(default)[10] : 差分DQS 0(启用)或1(禁用)[11] : RDQS 0(禁用)或1(启用)[12] : Qoff输出控制 0(启用)或1(禁用),包括DQ/DQS/RDQS
*//***********************寄存器************************/
reg [5:0] r_state, r_next_state ;
reg [16:0] r_latency_T ; //延时长度寄存器
reg [16:0] r_cnt_wait ; //计时计数器值
reg [3:0] r_ref_cnt ; //刷新次数计数
reg [7:0] r_cke_cnt ; //CKE拉高时间计数器reg r_cke ;
reg [1:0] r_init_ba ;
reg [3:0] r_init_cmd ;
reg [12:0] r_init_addr ;
reg r_init_end ;/***********************时序逻辑************************/
always@(posedge sys_clk or negedge rstn) begin //计时器模块if(!rstn)r_cnt_wait <= 17'd0;else if(r_cnt_wait == r_latency_T) //计满自动清零r_cnt_wait <= 17'd0;elser_cnt_wait <= r_cnt_wait +17'd1;
endalways@(posedge sys_clk or negedge rstn) begin //刷新次数计数器if(!rstn)r_ref_cnt <= 4'd0;else if((r_ref_cnt == REF_TIME) && (r_cnt_wait == T_tRFC)) //达到设定刷新次数且本次刷新后等待时间tRFC结束r_ref_cnt <= 4'd0;else if(r_next_state == AUTO_REF) //下一个状态是刷新r_ref_cnt <= r_ref_cnt + 4'd1;elser_ref_cnt <= r_ref_cnt;
end/*各个state持续时间的设定
在切换状态的一瞬间,计数器执行清零操作,目标计数值被重新赋值,这样就实现了延时参数的传递
那样就可以只使用一个计数器*/
always@(posedge sys_clk or negedge rstn) begin if(!rstn)r_latency_T <= 10'd0;elsecase(r_next_state)IDLE : r_latency_T <= 10'd0 ;WAIT_IDLE : r_latency_T <= T_INIT ;CLK_EN : r_latency_T <= 10'd0 ; WAIT_CKE : r_latency_T <= T_CKE ;P_CHAR : r_latency_T <= 10'd0 ;WAIT_PREC : r_latency_T <= T_tRPA ;LM : r_latency_T <= 10'd0 ;WAIT_LM : r_latency_T <= T_tMRD ;AUTO_REF : r_latency_T <= 10'd0 ;WAIT_REF : r_latency_T <= T_tRFC ;WAIT_DLL_RST : r_latency_T <= T_DLL_RST ;END : r_latency_T <= 10'd0 ;default : r_latency_T <= 10'd0 ;endcase
end/***********************组合逻辑************************/
assign cke = r_cke ;
assign init_cmd = r_init_cmd ;
assign init_addr = r_init_addr ;
assign init_ba = r_init_ba ;
assign init_end = r_init_end ;/***********************状态机************************/
always@(posedge sys_clk or negedge rstn) begin//状态转移if(!rstn)r_state <= IDLE;elser_state <= r_next_state;
endalways@(*) begin //状态转移判断模块,根据计时时间判断是否已经持续相应时间长度if(!rstn)r_next_state = IDLE;elsecase(r_state)IDLE :r_next_state = WAIT_IDLE;WAIT_IDLE :if(r_cnt_wait == r_latency_T)r_next_state = CLK_EN;elser_next_state = r_state;CLK_EN :r_next_state = WAIT_CKE;WAIT_CKE :if(r_cnt_wait == r_latency_T)r_next_state = P_CHAR;elser_next_state = r_state;P_CHAR :r_next_state = WAIT_PREC;WAIT_PREC :if(r_cnt_wait == r_latency_T)r_next_state = LM_EMR2;elser_next_state = r_state;LM_EMR2 :r_next_state = WAIT_LM;WAIT_LM :if(r_cnt_wait == r_latency_T)r_next_state = LM_EMR3;elser_next_state = r_state;LM_EMR3 :r_next_state = WAIT_LM;WAIT_LM :if(r_cnt_wait == r_latency_T)r_next_state = LM_EMR_1;elser_next_state = r_state;LM_EMR_1 :r_next_state = WAIT_LM;WAIT_LM :if(r_cnt_wait == r_latency_T)r_next_state = LM_MR_1;elser_next_state = r_state;LM_MR_1 :r_next_state = WAIT_LM;WAIT_LM :if(r_cnt_wait == r_latency_T)r_next_state = P_CHAR;elser_next_state = r_state;P_CHAR :r_next_state = WAIT_PREC;WAIT_PREC :if(r_cnt_wait == r_latency_T)r_next_state = AUTO_REF;elser_next_state = r_state;AUTO_REF :r_next_state = WAIT_REF;WAIT_REF : if((r_ref_cnt == REF_TIME) && (r_cnt_wait == r_latency_T)) //达到设定刷新次数且本次刷新后等待时间tRC结束r_next_state = LM_MR_2;else if(r_cnt_wait == r_latency_T)r_next_state = AUTO_REF;elser_next_state = r_state;LM_MR_2 :r_next_state = WAIT_LM;WAIT_LM :if(r_cnt_wait == r_latency_T)r_next_state = LM_EMR_2;elser_next_state = r_state;LM_EMR_2 :r_next_state = WAIT_LM;WAIT_LM :if(r_cnt_wait == r_latency_T)r_next_state = LM_EMR_3;elser_next_state = r_state;LM_EMR_3 :r_next_state = WAIT_LM;WAIT_LM :if(r_cnt_wait == r_latency_T)r_next_state = WAIT_DLL_RST;elser_next_state = r_state;WAIT_DLL_RST :if(r_cnt_wait == r_latency_T)r_next_state = END;elser_next_state = r_state;END : r_next_state = END;default : r_next_state = IDLE;endcase
endalways@(posedge sys_clk or negedge rstn) begin //输出模块,三段式状态机if(!rstn) beginr_init_cmd <= NOP ;r_init_ba <= 2'b11 ;r_init_addr <= 13'h1fff ;r_init_end <= 1'b0 ;end else case(r_state)IDLE,WAIT_IDLE,WAIT_CKE,WAIT_PREC,WAIT_LM,WAIT_REF,WAIT_DLL_RST : beginr_init_cmd <= NOP ;r_init_ba <= 2'b11 ;r_init_addr <= 13'h1fff ;endCLK_EN : beginr_cke <= 1'b1 ;endP_CHAR : beginr_init_cmd <= PREC ;r_init_ba <= 2'b11 ;r_init_addr <= 13'h1fff ;endLM_EMR2 : beginr_init_cmd <= LM ;r_init_ba <= 2'b10 ;r_init_addr <= EMR2 ;endLM_EMR3 : beginr_init_cmd <= LM ;r_init_ba <= 2'b11 ;r_init_addr <= EMR3 ;endLM_EMR_1 : beginr_init_cmd <= LM ;r_init_ba <= 2'b01 ;r_init_addr <= EMR_1 ;endLM_MR_1 : beginr_init_cmd <= LM ;r_init_ba <= 2'b00 ;r_init_addr <= MR_1 ;endLM_MR_2 : beginr_init_cmd <= LM ;r_init_ba <= 2'b00 ;r_init_addr <= MR_2 ;endLM_EMR_2 : beginr_init_cmd <= LM ;r_init_ba <= 2'b01 ;r_init_addr <= EMR_2 ;endLM_EMR_3 : beginr_init_cmd <= LM ;r_init_ba <= 2'b01 ;r_init_addr <= EMR_3 ;endAUTO_REF : beginr_init_cmd <= REF ;r_init_ba <= 2'b11 ;r_init_addr <= 13'h1fff ;endEND : beginr_init_cmd <= NOP ;r_init_ba <= 2'b11 ;r_init_addr <= 13'h1fff ;r_init_end <= 1'b1 ;enddefault : beginr_init_cmd <= NOP ;r_init_ba <= 2'b11 ;r_init_addr <= 13'h1fff ;endendcase
endendmodule注:本模块和后续模块不再进行单独仿真,可能会有bug,最终仿真完成会统一修改,然后删掉这句话。
附:延时查找表



相关文章:
DDR2 SDRAM(五)初始化
因为DDR2本质上只是更高级的一种SRAM,底层操作原理和SRAM是一样的,所以很多基础的东西就不再赘述了。 一、原理 在初始化之前,DDR2芯片需要先上电,芯片有多个需要提供的电压,其大小和顺序也有要求,这部分…...

Python工具箱系列(五十七)
图像分割与人脸识别 众所周知图像是由若干有意义的像素组成的,图像分割作为计算机视觉的基础,对具有现有目标和较精确边界的图像进行分割,实现在图像像素级别上的分类任务。图像分割可分为语义分割和实例分割两类,区别如下&#x…...

数据智能驱动金融策略优化:民锋智能分析技术的应用
在现代金融市场中,数据分析与智能化技术的结合为投资策略带来了全新机遇。民锋以智能分析技术为核心,帮助投资者在复杂的市场环境中做出高效决策。本文将深入探讨民锋智能分析技术如何驱动策略优化,为投资者带来更加智能化的支持。 #### 一、…...

1009:带余除法
【题目描述】 给定被除数和除数,求整数商及余数。此题中请使用默认的整除和取余运算,无需对结果进行任何特殊处理。 【输入】 一行,包含两个整数,依次为被除数和除数(除数非零),中间用一个空格隔…...

Jmeter实际应用
环境准备 JDK1.8Jmeter 5.6.3 下载地址Jmeter 插件 下载地址 放到lib/ext下 常用命令 # 启动 sh jmeter# 集群模式下启动节点,不启动用不了集群 sh jmeter-server#生成ssl需要的证书, 这里会要求输入个密码,是要在jmeter中用的 keytool -import -ali…...

C++基础(11.AVL树的实现)
目录 AVL的概念: AVL树的实现: AVL树的结构: AVL树的插⼊: 平衡因⼦更新: 旋转: AVL树的其他功能: AVL树平衡检测: 测试代码*2: 源代码: KV结构: 源代码: AVL…...

c# 抽象方法 虚函数 使用场景
在C#中,抽象方法(abstract method)和虚函数(virtual method)都是用于实现多态性(polymorphism)的重要特性,但它们在使用上有一些关键的区别和各自的用途。 抽象方法(Abs…...

大数据安全方案 验证
一、背景 文档用于记录配置 Kerberos 和 Ranger 后,对 HDFS、Hive 认证和鉴权的功能测试。 二、Kerberos 验证 2.1、验证功能 1,HDFS 认证 2.1.1、访问 HDFS Kerberos 验证前,访问 HDFS 失败。 Kerberos 验证后,访问 HDFS 成…...
电脑软件:推荐一款免费且实用的电脑开关机小工具
目录 一、软件简介 二、软件功能 三、软件特点 四、使用说明 五、软件下载 今天给大家推荐一款免费且实用的电脑开关机小工具KShutdown,有需要的朋友可以下载试一下! 一、软件简介 KShutdown是一款精巧且实用的定时自动关机小工具,对于…...

php反序列化靶场随笔分析
项目地址:github.com/mcc0624/php_ser_Class 推荐使用docker部署:https://hub.docker.com/r/mcc0624/ser/tags 前面讲了以下php基础,我们直接从class6开始实验 class6 访问页面,传一个序列化的字符串,php代码将其反…...

动态规划 - 编辑距离
115. 不同的子序列 困难 给你两个字符串 s 和 t ,统计并返回在 s 的 子序列 中 t 出现的个数,结果需要对 10^9 7 取模。 算法思想:利用动态规划,分s[i - 1] 与 t[j - 1]相等,s[i - 1] 与 t[j - 1] 不相等两种情况具…...
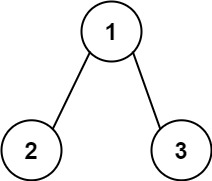
力扣——113. 路径总和
113. 路径总和 II 给你二叉树的根节点 root 和一个整数目标和 targetSum ,找出所有 从根节点到叶子节点 路径总和等于给定目标和的路径。 叶子节点 是指没有子节点的节点。 示例 1: 输入:root [5,4,8,11,null,13,4,7,2,null,null,5,1], t…...

C02S04-Ubuntu基本使用
一、Ubuntu初始配置 1. 使用root用户 Ubuntu系统默认只能使用普通用户,要想使用root用户,需要先设置root用户密码。 进入终端,配置root用户密码。按照提示输入密码。 sudo passwd root配置完成后,执行下面的密码,切换…...

C语言 | Leetcode C语言题解之第525题连续数组
题目: 题解: struct HashTable {int key, val;UT_hash_handle hh; };int findMaxLength(int* nums, int numsSize) {int maxLength 0;struct HashTable* hashTable NULL;struct HashTable* tmp malloc(sizeof(struct HashTable));tmp->key 0, tm…...

Qml-Transition的使用
Qml-Transition的使用 Transition的概述 Transition:定义了当状态发生改变时应用的动画属性animations : list:(Transition)过渡的动画属性enabled : bool:状态发生变化时,是否使能此过渡(Transition)动画…...

Notepad++检索包含多个关键字的行
Notepad检索包含多个关键字的行 在Notepad中,你可以使用正则表达式来检索包含多个关键字的行。以下是具体步骤: 打开Notepad,打开要搜索的文件。 点击菜单栏上的“搜索”选项,然后选择“查找”。 在弹出的查找对话框中…...

C语言:水仙花树,要求三位以上的N位整数每位的N次方等于数本身,全部输出出来
#include <stdio.h> int main() { int n; scanf("%d",&n);//这里是说明多少n位整数 int first1; int i1; while(i<n){//此while循环可以得到n位数的最小位,例如3位的100. first*10; i; } ifirst; whil…...
金融贷款口子超市V2源码 Thinkphp开发的贷款和超市平台源码(亲测源码含安装视频教程)
金融贷款口子超市V2源码 Thinkphp开发的贷款和超市平台源码 源码下载:https://download.csdn.net/download/m0_66047725/89938268 更多资源下载:关注我。...

redis的三种客户端
在 Redis 中,常用的 Java 客户端有三种:Jedis、Lettuce 和 Redisson。它们各有特点,适用于不同的场景。以下是它们的详细介绍,以及如何在 Spring Boot 中集成 Redis。 一、Redis 三种常用客户端详解 1.1 Jedis Jedis 是 Redis 官…...
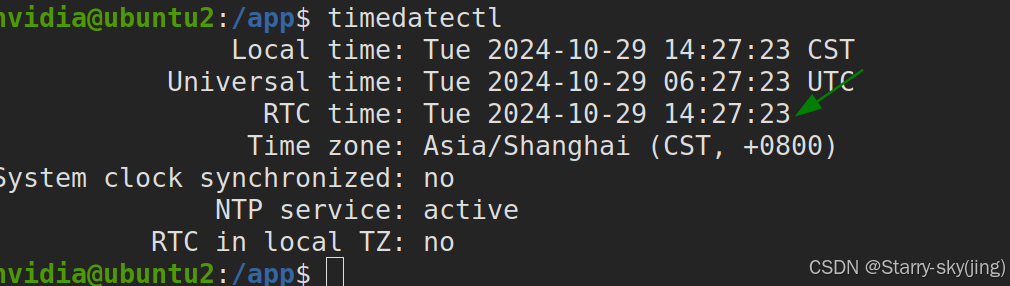
边缘计算【智能+安全检测】系列教程--agx orin解决RTC时间问题
因为是离线运行,首要问题是时间不准确,就在主板上加装了纽扣电池,但是会有一系列问题,比如无法将RTC时间回写到系统时间,或者无法将系统时间写到RTC中等等一些列问题。为解决这些问题,一劳永逸的方式&#…...

双足机器人推进系统建模与系统辨识技术解析
1. 双足机器人推进系统建模与验证概述在机器人动力学控制领域,系统辨识是建立精确数学模型的关键技术。本文以美国东北大学开发的Harpy v2双足机器人为研究对象,重点探讨其集成推进系统的推力与扭矩特性建模方法。这款机器人高约1.2米,重15公…...

别再怪BGA了!从X光图到金相分析,手把手教你排查PCB上那颗‘时好时坏’的芯片
从X光到金相切片:BGA虚焊故障的硬核排查指南 当你反复调试一块核心板时,那个诡异的BGA芯片就像在和你玩捉迷藏——用力按压时系统运行正常,松开手立刻故障重现。这种"时好时坏"的症状,往往让硬件工程师们抓狂。本文将带…...

SteamAutoCrack终极破解指南:三分钟移除游戏DRM保护
SteamAutoCrack终极破解指南:三分钟移除游戏DRM保护 【免费下载链接】Steam-auto-crack Steam Game Automatic Cracker 项目地址: https://gitcode.com/gh_mirrors/st/Steam-auto-crack 你是否遇到过Steam游戏无法离线运行的问题?或者想要在没有S…...

枚举进阶:从常量集合到业务逻辑承载者的实战扩展技巧
1. 项目概述:从“能用”到“好用”的枚举进阶之路在软件开发中,枚举(Enum)是我们再熟悉不过的基础工具了。它把一组有限的、具名的常量组织在一起,让代码意图更清晰,避免“魔法数字”满天飞。但不知道你有没…...

【Perplexity法规查询功能深度解密】:20年合规专家亲授3大避坑指南与5步精准检索法
更多请点击: https://codechina.net 第一章:Perplexity法规查询功能的核心定位与演进逻辑 Perplexity法规查询功能并非通用搜索引擎的简单延伸,而是面向法律合规、金融风控与企业治理场景构建的垂直智能体。其核心定位在于实现“可溯源、可验…...

ScienceDecrypting终极指南:如何永久解锁您的加密学术文献
ScienceDecrypting终极指南:如何永久解锁您的加密学术文献 【免费下载链接】ScienceDecrypting 破解CAJViewer带有效期的文档,支持破解科学文库、标准全文数据库下载的文档。无损破解,保留文字和目录,解除有效期限制。 项目地址…...

从7805到D-CAP2:TPS54229E实现12V转5V高效电源设计
1. 从线性稳压到D-CAP2:一个电源工程师的选型心路刚入行那会儿,画的第一块51单片机板子,电源部分几乎不用想,一个7805三端稳压器,加上输入输出两个电解电容,齐活。这东西皮实、便宜,满大街都是&…...

一文读懂现代城市照明:从亮化到数字化的行业升级指南
当前照明行业早已脱离单纯"亮起来"的初级阶段,正在向场景化、数字化、低碳化方向快速迭代,很多客户在选择照明服务商时往往对行业标准、技术趋势了解不足,导致项目效果与预期存在差距。行业升级的核心方向:从单一照明到…...

标签系统的底层同步拓扑:大批量客户标签异步更新的一致性方案
标签(Tag)是私域精细化运营的灵魂。在进行大规模广告投放、或者老客清洗时,企业系统经常需要同时为上万个外部客户批量追加或清空标签。 1. 标签同步的复杂性在哪里? 原生设计中,企业微信的标签是以“企业标签组&#…...

如何快速配置PlotSquared:Minecraft领地管理完整教程
如何快速配置PlotSquared:Minecraft领地管理完整教程 【免费下载链接】PlotSquared PlotSquared - Reinventing the plotworld 项目地址: https://gitcode.com/gh_mirrors/pl/PlotSquared 你是否厌倦了Minecraft服务器中混乱的建筑和领地冲突?想要…...