跨越科技与文化的桥梁——ROSCon China 2024 即将盛大开幕
在全球机器人技术飞速发展的浪潮中,ROS(Robot Operating System)作为一款开源的机器人操作系统,已成为无数开发者、研究人员和企业的首选工具。为了进一步推动ROS的应用与发展,全球知名的机器人操作系统会议——ROSCon即将迎来其在中国内地的首次盛会:ROSCon China 2024。受到ROSCon邀请,我这里给大家来抛砖引玉的介绍一下这个大会,也欢迎大家在当天来面基,交流一下行业前沿与后续可能的工作和扩展机会

一、会议概况
ROSCon China 2024将于2024年12月7日至8日在上海长滩音乐厅隆重举行,由ROS教育基金会与开源机器人基金会(OSRF)共同主办,古月居承办。本届大会将汇聚全球顶尖的机器人技术专家、开发者和爱好者,共同探讨ROS的最新发展、应用与创新,分享宝贵的经验与前沿技术。

二、丰富的议题与活动
本次大会将围绕以下主题展开深入讨论:
- ROS的最新发展与应用:探讨ROS在各个领域的最新应用,分享成功案例与经验。
- 机器人技术的创新:展示机器人技术的前沿研究,揭示未来发展的趋势与方向。
- 开源软件在机器人中的使用:分享开源软件在提升机器人研发效率与降低成本方面的优势。
- 社区合作与项目展示:促进开发者之间的交流与合作,展示各类优秀的ROS项目。

三、顶尖专家分享与实战经验
ROSCon China 2024将邀请国内外知名机器人技术专家进行主题演讲,分享他们在ROS应用领域的最新研究成果与实战经验。这不仅是一个学习与交流的机会,更是一个激发灵感、碰撞思想的盛会。

四、前沿科技与传统文化的融合
本届大会将深度融合中国传统文化与现代科技,为参会者带来前所未有的参会体验。特色展区将展示最新的ROS机器人产品,以及基于ROS的智能制造、智慧城市、智慧医疗等前沿应用场景,让参会者亲身体验科技的魅力。

五、参与与交流的机会
ROSCon China 2024不仅是一个技术交流的平台,更是一个促进社区合作、建立联系的机会。无论您是机器人领域的研究人员、开发者,还是对机器人技术感兴趣的学生,您都将在这里找到志同道合的伙伴,分享您的观点与经验。

六、如何参与
想要了解更多关于ROSCon China 2024的信息,请访问官方网站 ROSCon China 2024。在这里,您可以找到会议日程、演讲嘉宾、注册信息等详细内容。
相关文章:
跨越科技与文化的桥梁——ROSCon China 2024 即将盛大开幕
在全球机器人技术飞速发展的浪潮中,ROS(Robot Operating System)作为一款开源的机器人操作系统,已成为无数开发者、研究人员和企业的首选工具。为了进一步推动ROS的应用与发展,全球知名的机器人操作系统会议——ROSCon…...

springboot+shiro 权限管理
一、为什么要了解权限框架 权限管理框架属于系统安全的范畴,权限管理实现对用户访问系统的控制,按照安全规则用户可以访问而且只能访问自己被授权的资源。 目前常见的权限框架有Shiro和Spring Security,本篇文章记录springboot整合sh…...

PureMVC在Unity中的使用(含下载链接)
前言 Pure MVC是在基于模型、视图和控制器MVC模式建立的一个轻量级的应用框架,这种开源框架是免费的,它最初是执行的ActionScript 3语言使用的Adobe Flex、Flash和AIR,已经移植到几乎所有主要的发展平台,支持两个版本框架…...

25国考照片处理器使用流程图解❗
1、打开“国家公务员局”网站,进入2025公务员专题,找到考生考务入口 2、点击下载地址 3、这几个下载链接都可以 4、下载压缩包 5、解压后先看“使用说明”,再找到“照片处理工具”双击。 6、双击后会进入这样的界面,点击&…...

一位纯理科生,跨界自学中医,自行组方治好胃病、颈椎病与高血脂症,并在最权威的中国中医药出版社出版壹本专业中医图书!
这是一位铁杆中医迷, 也是《神农本草经——精注易读本》的作者。 希望更多的人能够受到启发,感受中医之神奇,敢于跨界,爱好中医,学习中医! 一个病人以自己的切身感受与诊断,并使之汤药治愈疾病&…...
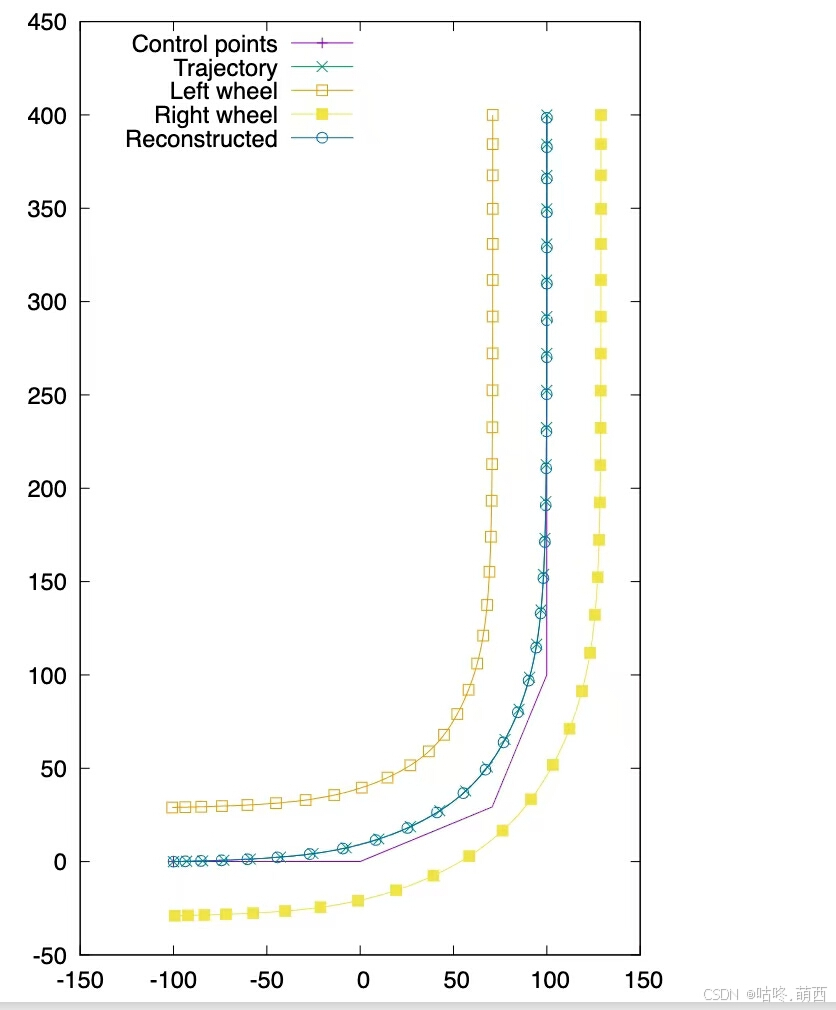
运动控制 双轮差速模型轨迹规划
文章目录 一、轨迹规划1.1轨迹平滑与轮迹1.2 目标距离1.3 速度限制1.4 候选速度的计算与调整1.5 路径生成 二、双轮轨迹2.1 计算梯度2.2 计算偏移轨迹2.3 返回结果 一、轨迹规划 1.1轨迹平滑与轮迹 初始时,我们有一条由若干坐标点构成的机器人运行路径。通过对这些…...

使用 Sortable.js 库 实现 Vue3 elementPlus 的 el-table 拖拽排序
文章目录 实现效果Sortable.js介绍下载依赖添加类名导入sortablejs初始化拖拽实例拖拽完成后的处理总结 在开发过程中,我们经常需要处理表格数据,并为用户提供便捷的排序方式。特别是在需要管理长列表、分类数据或动态内容时,拖拽排序功能显得…...
)
MySQL索引相关介绍及优化(未完...)
如何看一条SQL语句的执行好坏? MySQL提供了自带的工具Explain可以查看sql语句的执行好坏。 explain主要的列: 1:type:这一列表示MySQL决定如何查找表中的行,查找数据行记录的大概范围。 有 system const eq_ref ref…...

【AI+教育】一些记录@2024.11.04
一、尝新 今天尝试了使用九章随时问,起因是看到快刀青衣的AI产品好用榜,里面这么介绍九章随时问:「它不是像其他产品那样,直接给你出答案。而是跟你语音对话,你会感觉更像是有一位老师坐在你的旁边,一步步…...

三维测量与建模笔记 - 2.2 射影几何
教程中H矩阵写的有问题,上图中H矩阵应该是(n1) x (m1) 共点不变性,下图中黄色方块标记的点,在射影变换前后,虽然直线的形状有所变化,但仍然相交于同一个点。 共线不变性,下图黄色标记的两个点,在…...

论文速读:简化目标检测的无源域适应-有效的自我训练策略和性能洞察(ECCV2024)
中文标题:简化目标检测的无源域适应:有效的自我训练策略和性能洞察 原文标题:Simplifying Source-Free Domain Adaptation for Object Detection: Effective Self-Training Strategies and Performance Insights 1、Abstract 本文重点关注计算…...

ros与mqtt相互转换
vda5050 VDA5050协议介绍 和 详细翻译-CSDN博客 ros与mqtt相互转换 如何转换的,通过某个中转包,获取ros的消息然后以需要的格式转换为mqtt 需要的参数 ros相关 parameters[ (ros_subscriber_type, vda5050_msgs/NodeState), (ros_subscriber_queue…...

Golang | Leetcode Golang题解之第522题最长特殊序列II
题目: 题解: func isSubseq(s, t string) bool {ptS : 0for ptT : range t {if s[ptS] t[ptT] {if ptS; ptS len(s) {return true}}}return false }func findLUSlength(strs []string) int {ans : -1 next:for i, s : range strs {for j, t : range s…...

安卓开发之数据库的创建与删除
目录 前言:基础夯实:数据库的创建数据库的删除注意事项 效果展示:遇到问题:如何在虚拟机里面找到这个文件首先,找到虚拟机文件的位置其次,找到数据库文件的位置 核心代码: 前言: 安…...

数据结构:LRUCache
什么是LRUCache 首先我们来看看什么是cache 缓存(Cache)通常用于两个速度不同的介质之间,以提高数据访问的速度和效率。这里有几个典型的应用场景: 处理器和内存之间: 处理器(CPU)的运算速度远…...

shell脚本案例:创建用户和组
使用场景 在部署程序时,往往首要任务是创建用户和组。有的程序可能用到的组、用户比较多;且不知道服务器环境是否已经有了所需的组和用户。所以针对这个情况,根据Oracle RAC部署时的实际情况写了个脚本。 Linux版本 脚本代码 #!/bin/bash …...

C++笔试题之实现一个定时器
一.定时器(timer)的需求 1.执行定时任务的时,主线程不阻塞,所以timer必须至少持有一个线程用于执行定时任务 2.考虑到timer线程资源的合理利用,一个timer需要能够管理多个定时任务,所以timer要支持增删任务…...

【英特尔IA-32架构软件开发者开发手册第3卷:系统编程指南】2001年版翻译,2-13
文件下载与邀请翻译者 学习英特尔开发手册,最好手里这个手册文件。原版是PDF文件。点击下方链接了解下载方法。 讲解下载英特尔开发手册的文章 翻译英特尔开发手册,会是一件耗时费力的工作。如果有愿意和我一起来做这件事的,那么ÿ…...

快消零售行业的培训创新:构建在线培训知识库
在快速消费品(FMCG)行业中,员工的培训和发展对于保持竞争力至关重要。随着电子商务的兴起和消费者行为的变化,快消零售行业需要不断适应新的市场趋势。在线培训知识库作为一种有效的培训工具,可以帮助企业提升员工技能…...

【AI开源项目】Botpress - 开源智能聊天机器人平台及其部署方案
文章目录 Botpress 概述Botpress 的定位 Botpress 的主要特点1. OpenAI 集成2. 易于使用3. 定制和扩展性4. 多平台支持5. 集成和扩展 API6. 活跃的社区和详尽的文档 部署方案集成集成开发集成部署机器人示例开发工具代理本地开发先决条件从源代码构建 Botpress 如何解决常见问题…...

AI智能体到底强在哪?为什么大家开始从“养龙虾”转向“养马”
那么AI智能体的核心能力是什么? 1、理解需求 它能分析你的真实意图,而不是只看表面的文字,比如让它整理这个月的消费情况,它明白之后,会读取账单,做分类统计,生成总结,最后输出图表。…...
重构)
嘈杂工业场景下的自适应VAD与双码本声纹识别鉴权系统:基于端侧轻量化神经网络与向量量化(VQ)重构
在大型化工车间、能源集控中心以及金融极密隔离库房中,离线声纹识别是物理访问控制和身份安全核验的重要生物特征屏障。然而,在环境本底噪声高达80dB以上的恶劣工业场景下,常规的语音活动检测(VAD)会频繁误触ÿ…...

Burp Suite证书安装全解:HTTPS抓包失败的根源与跨平台命令行方案
1. 为什么必须亲手安装Burp Suite证书——不是“点一下就完事”的操作很多人第一次在手机或测试设备上配置Burp Suite代理时,会下意识认为:只要把电脑上的Burp监听地址填进Wi-Fi代理设置,再用浏览器访问http://burp,点击那个绿色的…...

告别元素变动导致的报错:探索自动化测试脚本的 AI“自愈”能力
前言:一个所有测试人都经历过的噩梦 周三晚上十一点,CI/CD流水线再次亮起红灯。 你打开日志,满屏的NoSuchElementException扑面而来。仔细一看——前端团队在昨天的版本中重构了登录页面的DOM结构,原本的#login-btn变成了#signin-button-v2,30个测试用例因此全军覆没。 …...

基于Arduino与nRF24L01+的无线传感器平台设计与部署指南
1. 项目概述与设计思路如果你和我一样,喜欢在阳台或者小院子里种点蔬菜瓜果,那你肯定也遇到过这样的烦恼:出门几天,心里总惦记着家里的番茄苗是不是缺水了,小温室里的温度会不会太高。传统的温湿度计只能让你在现场读数…...

FairyGUI Unity鼠标悬停与点击对象获取原理与实战
1. 这不是“加个OnMouseEnter就能用”的事:FairyGUI在Unity中处理鼠标交互的真实困境很多人第一次在Unity里集成FairyGUI,想实现“鼠标悬停显示提示”或“点击高亮当前按钮”,下意识就去翻Unity的MonoBehaviour文档,找OnMouseEnte…...

PCL 基于强度的双边滤波【2026最新版】
目录 一、算法原理 1、计算步骤 2、算法源码 3、函数解析 4、参考文献 二、代码实现 三、结果展示 四、滤波后未发生变化的原因 五、解决办法 六、结果展示 七、相关链接 本文由CSDN点云侠原创,博客长期更新,本文最近一次更新时间为:2026年5月24日。 一、算法原理 1、计算…...

CausalVLR基准测试报告:在IU X-Ray和MIMIC-CXR数据集上的性能分析
CausalVLR基准测试报告:在IU X-Ray和MIMIC-CXR数据集上的性能分析 【免费下载链接】CausalVLR CausalVLR: A Toolbox and Benchmark for Vision-Language Causal Reasoning (多模态因果推理开源框架) 项目地址: https://gitcode.com/gh_mirrors/ca/CausalVLR …...

Unity塔防底层架构:ScriptableObject驱动的数据契约设计
1. 这不是“又一个塔防模板”,而是塔防开发的底层操作系统我第一次在Asset Store点开Tower Defense Toolkit 4(TDTK-4)的预览图时,下意识划走了——界面太“干净”了,没有炫酷的粒子特效演示,没有满屏飞舞的…...

XZ1018,100V,40A,NMOS 封装:TO252
封装:TO252类型:NVDS:100V VGS: 20V ID:40ARDS(ON):10V <14mΩRDS(ON):4.5V <19mΩ型号: XZ1018 封装:TO252类型…...