【操作系统】——调度算法
🌹😊🌹博客主页:【Hello_shuoCSDN博客】
✨操作系统详见 【操作系统专项】
✨C语言知识详见:【C语言专项】
目录
先来先服务(FCFS, First Come First Serve)
短作业优先(SJF, Shortest Job First )
高响应比优先(HRRN,Highest Response Ratio Next)
时间片轮转(RR, Round-Robin)
优先级调度算法
多级反馈队列调度算法
先来先服务(FCFS, First Come First Serve)
算法思想——主要从“公平”的角度考虑(类似于我们生活中排队买东西的例子)
算法规则——按照作业/进程到达的先后顺序进行服务
用于作业/进程调度——用于作业调度时,考虑的是哪个作业先到达后备队列;用于进程调度时,考虑的是哪个进程先到达就绪队列
是否可抢占?——非抢占式的算法
优缺点——优点:公平、算法实现简单
缺点:排在长作业(进程)后面的短作业需要等待很长时间,带权周转时间很大,对短作业来说用户体验不好。即FCFS算法对长作业有利,对短作业不利(Eg:排队买奶茶..)
是否会导致饥饿(某进程/作业长期得不到服务)——不会
例题:各进程到达就绪队列的时间、需要的运行时间如下表所示。使用先来先服务调度算法,计算各进程的等待时间、平均等待时间、周转时间、平均周转时间、带权周转时间、平均带权周转时间。

先来先服务调度算法:按照到达的先后顺序调度,事实上就是等待时间越久的越优先得到服务。
因此,调度顺序为:P1-> P2-> P3-> P4

周转时间=完成时间-到达时间 P1=7-0=7; P2=11-2=9; P3=12-4=8; P4=16-5=11
带权周转时间=周转时间/运行时间 P1=7/7=1; P2=9/4=2.25; P3=8/1=8; P4=11/4=2.75
等待时间=周转时间-运行时间 P1=7-7=0;P2=9-4=5;P3=8-1=7;P4=11-4=7
平均周转时间 = (7+9+8+11)/4=8.75
平均带权周转时间 = (1+2.25+8+2.75)/4=3.5
平均等待时间 = (0+5+7+7)/4=4.75
注意:本例中的进程都是纯计算型的进程,一个进程到达后要么在等待,要么在运行。如果是又有计算、又有1/O操作的进程,其等待时间就是周转时间-运行时间-1/O操作的时间.
短作业优先(SJF, Shortest Job First )
算法思想——追求最少的平均等待时间,最少的平均周转时间、最少的平均平均带权周转时间。
算法规则——最短的作业/进程优先得到服务(所谓“最短”,是指要求服务时间最短)。
用于作业/进程调度——即可用于作业调度,也可用于进程调度。用于进程调度时称力“短进程优先(SPF, Shortest Process First)算法”。
是否可抢占?——SJF和SPF是非抢占式的算法。但是也有抢占式的版本一一最短剩余时间优先算法(SRTN, Shortest Remaining Time Next)
优缺点——优点:“最短的”平均等待时间、平均周转时间。缺点:不公平。对短作业有利,对长作业不利。可能产生饥饿现象。另外,作业/进程的运行时间是由用户提供的,并不一定真实,不一定能做到真正的短作业优先。
是否会导致饥饿——会。如果源源不断地有短作业/进程到来,可能使长作业/进程长时间得不到服务,产生“饥饿”现象。如果一直得不到服务,则称为“饿死”。
例题:各进程到达就绪队列的时间、需要的运行时间如下表所示。使用抢占式的短作业优先调度算法,计算各进程的等待时间、平均等待时间、周转时间、平均周转时间、带权周转时间、平均带权周转时间。
抢占式 : 抢占式的短作业优先算法又称“最短剩余时间优先算法(SRTN)”。

最短剩余时间优先算法:每当有进程加入就绪队列改变时就需要调度,如果新到达的进程剩余时间比当前运行的进程剩余时间更短,则由新进程抢占处理机,当前运行进程重新回到就绪队列。另外,当一个进程完成时也需要调度。

周转时间=完成时间-到达时间 P1=16-0=16: P2=7-2=5: P3=5-4=1;P4=11-5=6
带权周转时间=周转时间/运行时间 P1=16/7=2.28; P2=5/4=1.25; P3=1/1=1; P4=6/4=1.5
等待时间=周转时间-运行时间 P1=16-7=9; P2=5-4=1; P3=1-1=0; P4=6-4=2
平均周转时间=(16+5+1+6)/4=7
平均带权周转时间 =(2.28+1.25+1+1.5)/4=1.50
平均等待时间=(9+1+0+2)/4=3
对比非抢占式的短作业优先算法,显然抢占式的这几个指标又要更低!
思考:(对FCFS和SJF两种算法的思考)
FCFS 算法是在每次调度的时候选择一个等待时间最长的作业(进程)为其服务。但是没有考虑到作业的运行时间,因此导致了对短作业不友好的问题。
SJF 算法是选择一个执行时间最短的作业为其服务。但是又完全不考虑各个作业的等待时间,因此导致了对长作业不友好的问题,甚至还会造成饥饿问题。
能不能设计一个算法,即考虑到各个作业的等待时间,也能兼顾运行时间呢?
于是就提出了高响应比优先算法
高响应比优先(HRRN,Highest Response Ratio Next)
算法思想——要综合考虑作业/进程的等待时间和要求服务的时间
算法规则——在每次调度时先计算各个作业/进程的响应比,选择响应比最高的作业/进程为其服务
用于作业/进程调度——即可用于作业调度,也可用于进程调度是否可抢占?——非抢占式的算法。因此只有当前运行的作业/进程主动放弃处理机时,才需要调度,才需要计算响应比。
优缺点——综合考虑了等待时间和运行时间(要求服务时间)
等待时间相同时,要求服务时间短的优先(SJF的优点)
要求服务时间相同时,等待时间长的优先(FCFS 的优点)
对于长作业来说,随着等待时间越来越久,其响应比也会越来越大,从而避免了长作业饥饿的问题
响应比=(等待时间+要求服务时间)/ 要求服务时间
(响应比≥1)
例题:各进程到达就绪队列的时间、需要的运行时间如下表所示。使用高响应比优先调度算法,计算各进程的等待时间、平均等待时间、周转时间、平均周转时间、带权周转时间、平均带权周转时间。

高响应比优先算法:非抢占式的调度算法,只有当前运行的进程主动放弃CPU时(正常/异常完成,或主动阻塞),才需要进行调度,调度时计算所有就绪进程的响应比,选响应比最高的进程上处理机。

对比:

注:这几种算法主要关心对用户的公平性、平均周转时间、平均等待时间等评价系统整体性能的指标,但是不关心“响应时间”,也并不区分任务的紧急程度,因此对于用户来说,交互性很糟糕。因此这三种算法一般适合用于早期的批处理系统,当然,FCFS算法也常结合其他的算法使用,在现在也扮演着很重要的角色。
时间片轮转(RR, Round-Robin)
算法思想——公平地、轮流地为各个进程服务,让每个进程在一定时间间隔内都可以得到响应
算法规则——按照各进程到达就绪队列的顺序,轮流让各个进程执行一个时间片(如100ms)。若进程未在一个时间片内执行完,则剥夺处理机,将进程重新放到就绪队列队尾重新排队。
用于作业/进程调度——用于进程调度(只有作业放入内存建立了相应的进程后,才能被分配处理机时间片)
是否可抢占?——若进程未能在时间片内运行完,将被强行剥夺处理机使用权,因此时间片轮转调度算法属于抢占式的算法。由时钟装置发出时钟中断来通知CPU时间片已到。优缺点——优点:公平;响应快,适用于分时操作系统;
缺点:由于高频率的进程切换,因此有一定开销;不区分任务的紧急程度。
是否会导致饥饿——不会
例题:各进程到达就绪队列的时间、需要的运行时间如下表所示。使用时间片轮转 (常用于分时操作系统,更注重“响应时间”,因而此处不计算周转时)调度算法,分析时间片大小分别是2、5时的进程运行情况。

时间片轮转调度算法:轮流让就绪队列中的进程依次执行一个时间片(每次选择的都是排在就绪队列队头的进程)

时间片大小为2(注:以下括号内表示当前时刻就绪队列中的进程、进程的剩余运行时间)
0时刻(P1(5)):0时刻只有P1到达就绪队列,让P1上处理机运行一个时间片
2时刻(P2(4)-> P1(3)):2时刻P2到达就绪队列,P1运行完一个时间片,被剥夺处理机,重新放到队尾。
此时P2排在队头,因此让P2上处理机。(注意:2时刻,P1下处理机,同一时刻新进程P2到达.
4时刻(P1(3)→P3(1)→ P2(2)):4时刻,P3到达,先插到就绪队尾,紧接着,P2下处理机也插到队尾。
5时刻(P3(1) P2(2) P4(6)):5时刻,P4到达插到就绪队尾(注意:由于P1的时间片还没用完,因此暂时不调度。另外,此时P1处于运行态,并不在就绪队列中)
6时刻 (P3(1)-> P2(2)-> P4(6)-> P1(1)):6时刻,P1时间片用完,下处理机,重新放回就绪队尾,发生调度
7时刻(P2(2)-> P4(6)-> P1(1)):虽然P3的时间片没用完,但是由于P3只需运行1个单位的时间,运行完了会主动放弃处理机,因此也会发生调度。队头进程P2上处理机。
9时刻(P4(6)-> P1(1)):进程P2时间片用完,并刚好运行完,发生调度,P4上处理机
11时刻(P1(1)-> P4(4)):P4时间片用完,重新回到就绪队列。P1上处理机
12时刻(P4(4)):P1运行完,主动放弃处理机,此时就绪队列中只剩P4,P4上处理机
14时刻():就绪队列为空,因此让P4接着运行一个时间片。
16时刻:所有进程运行结束

时间片大小为5
0时刻 (P1(5)):只有P1到达,P1上处理机。
2时刻(P2(4)):P2到达,但P1时间片尚未结束,因此暂不调度。
4时刻(P2(4)-> P3(1)):P3到达,但P1时间片尚未结束,因此暂不调度
5时刻(P2(4)→P3(1)→P4(6)):P4到达,同时P1运行结束。发生调度,P2上处理机。
9时刻(P3(1)-> P4(6)):P2运行结束,虽然时间片没用完,但是会主动放弃处理机。发生调度。
10时刻(P4(6)):P3运行结束,虽然时间片没用完,但是会主动放弃处理机。发生调度。
15时刻():P4时间片用完,但就绪队列为空,因此会让P4继续执行一个时间片。
16时刻():P4运行完,主动放弃处理机。所有进程运行完

若按照先来先服务调度算法...
如果时间片太大,使得每个进程都可以在一个时间片内就完成,则时间片轮转调度算法退化为先来先服务调度算法,并且会增大进程响应时间。因此时间片不能太大。
另一方面,进程调度、切换是有时间代价的(保存、恢复运行环境),因此如果时间片太小,会导致进程切换过于频繁,系统会花大量的时间来处理进程切换,从而导致实际用于进程执行的时间比例减少。可见时间片也不能太小。
优先级调度算法
算法思想——随着计算机的发展,特别是实时操作系统的出现,越来越多的应用场景需要根据任务的紧急程度来决定处理顺序
算法规则——调度时选择优先级最高的作业/进程
用于作业/进程调度——既可用于作业调度,也可用于进程调度。甚至,还会用于在之后会学习的 I/O 调度中
是否可抢占?——抢占式、非抢占式都有。做题时的区别在于:非抢占式只需在进程主动放弃处理机时进行调度即可,而抢占式还需在就绪队列变化时,检查是否会发生抢占。优缺点——优点:用优先级区分紧急程度、重要程度,适用于实时操作系统。可灵活地调整对各种作业/进程的偏好程度。
缺点:若源源不断地有高优先级进程到来,则可能导致饥饿是否会导致饥饿——会
例题:各进程到达就绪队列的时间、需要的运行时间、进程优先数如下表所示。使用非抢占式的优先级调度算法,分析进程运行情况。(注:优先数越大,优先级越高)

非抢占式的优先级调度算法:每次调度时选择当前已到达且优先级最高的进程。当前进程主动放弃处理机时发生调度

注:以下括号内表示当前处于就绪队列的进程
0时刻(P1):只有P1到达,P1上处理机。
7时刻(P2、P3、P4):P1运行完成主动放弃处理机,其余进程都已到达,P3优先级最高,P3上处理机。
8时刻(P2、P4):P3完成,P2、P4优先级相同,由于P2先到达,因此P2优先上处理机
12时刻(P4):P2完成,就绪队列只剩P4,P4上处理机。
16时刻():P4完成,所有进程都结束
例题:各进程到达就绪队列的时间、需要的运行时间、进程优先数如下表所示。使用抢占式的优先级调度算法,分析进程运行情况。(注:优先数越大,优先级越高)

抢占式的优先级调度算法:每次调度时选择当前己到达且优先级最高的进程。当前进程主动放弃处理机时发生调度。
另外,当就绪队列发生改变时也需要检查是会发生抢占

注:以下括号内表示当前处于就绪队列的进程
0时刻(P1):只有P1到达,P1上处理机。
2时刻(P2):P2到达就绪队列,优先级比P1更高,发生抢占。P1回到就绪队列,P2上处理机。
4时刻(P1、P3):P3到达,优先级比P2更高,P2回到就绪队列,P3抢占处理机。
5时刻(P1、P2、P4):P3完成,主动释放处理机,同时,P4也到达,由于P2比P4更先进入就绪队列,因此选择P2上处理机
7时刻(P1、P4):P2完成,就绪队列只剩P1、P4,P4上处理机。
11时刻(P1):P4完成,P1上处理机
补充:
就绪队列未必只有一个,可以按照不同优先级来组织。另外,也可以把优先级高的进程排在更靠近队头的位置
根据优先级是否可以动态改变,可将优先级分为静态优先级和动态优先级两种。
静态优先级:创建进程时确定,之后一直不变。
动态优先级:创建进程时有一个初始值,之后会根据情况动态地调整优先级。
通常:
系统进程优先级 高于 用户进程
前台进程优先级 高于 后台进程
操作系统更偏好 I/O 型进程(或称I/O 繁忙型进程)
(I/O 繁忙型进程)——I/O设备和CPU可以并行工作。如果优先让I/O繁忙型进程优先运行的话,则越有可能让I/O设备尽早地投入工作,则资源利用率、系统吞吐量都会得到提升。
注:与I/O 型进程相对的是计算型进程(或称 CPU繁忙型进程)
思考…如果采用的是动态优先级,什么时候应该调整?
可以从追求公平、提升资源利用率等角度考虑,如果某进程在就绪队列中等待了很长时间,则可以适当提升其优先级如果某进程占用处理机运行了很长时间,则可适当降低其优先级.
多级反馈队列调度算法
算法思想——对其他调度算法的折中权衡
算法规则——1. 设置多级就绪队列,各级队列优先级从高到低,时间片从小到大
2.新进程到达时先进入第1级队列,按FCFS原则排队等待被分配时间片,若用完时间片进程还未结束,则进程进入下一级队列队尾。如果此时己经是在最下级的队列,则重新放回该队列队尾
3. 只有第k级队列为空时,才会为k+1级队头的进程分配时间片用于进程调度
用于作业/进程调度——抢占式的算法。在k级队列的进程运行过程中,若更上级的队列(1~K-1级)中进入了一个新进程,则由于新进程处于优先级更高的队列中,因此新进程会抢占处理机,原来运行的进程放回k级队列队尾。
优缺点——对各类型进程相对公平 (FCFS的优点);每个新到达的进程都可以很快就得到响应(RR的优点);短进程只用较少的时间就可完成(SPF的优点);不必实现估计进程的运行时间(避免用户作假);可灵活地调整对各类进程的偏好程度,比如CPU密集型进程、1/0密集型进程(拓展:可以将因1/0而阻塞的进程重新放回原队列,这样1/O型进程就可以保持较高优先级)
是否会导致饥饿——会

注:比起早期的批处理操作系统来说,由于计算规造价大幅降低,因此之后出现的交互式操作系统(包括分时操作系统、实时操作系统等)更注重系统的响应时间、公平性、平衡性等指标。而这几种算法恰好也能较好地满足交互式系统的需求。因此这三种算法适合用于交互式系统。(比如UNIX使用的就是多级反馈队列调度算法)
系统中按进程类型设置多个队列,进程创建成功后插入某个队列。

队列之间可采取固定优先级,或时间片划分固定优先级:高优先级空时低优先级进程才能被调度时间片划分:如三个队列分配时间50%、40%、10%.
各队列可采用不同的调度策略,如:系统进程队列采用优先级调度交互式队列采用RR,批处理队列采用FCFS。
相关文章:
【操作系统】——调度算法
🌹😊🌹博客主页:【Hello_shuoCSDN博客】 ✨操作系统详见 【操作系统专项】 ✨C语言知识详见:【C语言专项】 目录 先来先服务(FCFS, First Come First Serve) 短作业优先(SJF, Shortest Job Fi…...

MySQL LOAD DATA INFILE导入数据报错
1.导入命令 LOAD DATA INFILE "merge.csv" INTO TABLE 报名数据 FIELDS TERMINATED BY , ENCLOSED BY " LINES TERMINATED BY \n IGNORE 1 LINES; 2.表结构 CREATE TABLE IF NOT EXISTS 报名数据 ( pid VARCHAR(100) NOT NULL, 查询日期 VARCHAR(25) NO…...

AI 写作(五)核心技术之文本摘要:分类与应用(5/10)
一、文本摘要:AI 写作的关键技术 文本摘要在 AI 写作中扮演着至关重要的角色。在当今信息爆炸的时代,人们每天都被大量的文本信息所包围,如何快速有效地获取关键信息成为了一个迫切的需求。文本摘要技术正是为了解决这个问题而诞生的&#x…...
贯穿软件开发生存周期中的测试)
CTFL(二)贯穿软件开发生存周期中的测试
贯穿软件开发生存周期中的测试 验收测试(acceptance testing),黑盒测试(black-box testing),组件集成测试(component integration testing),组件测试(compone…...

PMIC FS8405
FS8495 具有多个SMPS和LDO的故障安全系统基础芯片。 FS8X 大多数参数都是通过OTP寄存器设置的。 概述 FS85/FS84设备系列是按照ASIL D流程开发的,FS84具有ASIL B能力,而FS85具有ASIL D能力。所有的设备选项都是引脚到引脚和软件兼容的。 FS85/FS84是一种汽车功能安全…...
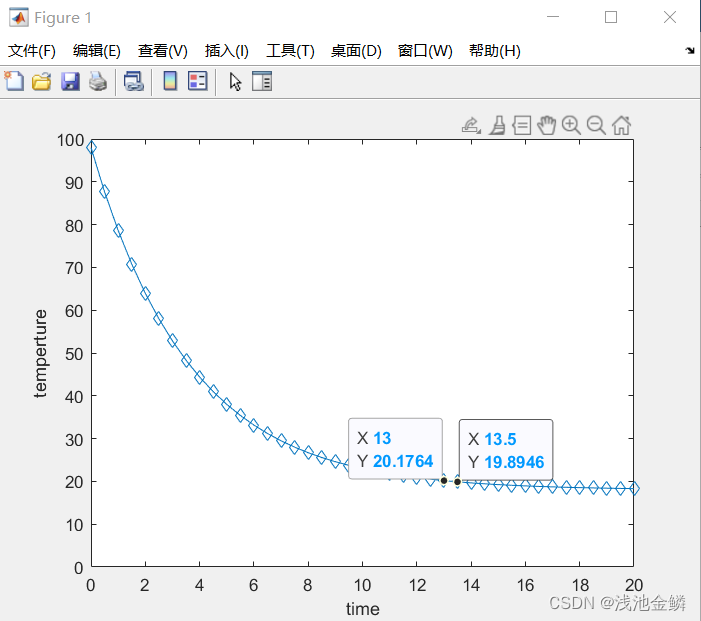
matlab建模入门指导
本文以水池中鸡蛋温度随时间的变化为切入点,对其进行数学建模并进行MATLAB求解,以更为通俗地进行数学建模问题入门指导。 一、问题简述 一个煮熟的鸡蛋有98摄氏度,将它放在18摄氏度的水池中,五分钟后鸡蛋的温度为38摄氏度&#x…...

微搭低代码入门03函数
目录 1 函数的定义与调用2 参数与返回值3 默认参数4 将功能拆分成小函数5 函数表达式6 箭头函数7 低代码中的函数总结 在用低代码开发软件的时候,除了我们上两节介绍的变量、条件语句外,还有一个重要的概念叫函数。函数是执行特定功能的代码片段…...

零基础Java第十六期:抽象类接口(二)
目录 一、接口(补) 1.1. 数组对象排序 1.2. 克隆接口 1.3. 浅拷贝和深拷贝 1.4. 抽象类和接口的区别 一、接口(补) 1.1. 数组对象排序 我们在讲一维数组的时候,使用到冒泡排序来对数组里的元素进行从小到大或从大…...

【css】html里面的图片宽度设为百分比,高度要与宽度一样
场景:展示图片列表的时候,原始图片宽高不一致。 外层div的宽度自适应,图片宽度不能固定数值,只能设置百分比。图片高度也不能设置固定数值。 如何让图片的高度与图片的宽度一样呢? html代码 : <div cl…...

前端三大组件之CSS,三大选择器,游戏网页仿写
回顾 full stack全栈 Web前端三大组件 结构(html) 样式(css) 动作/交互(js) --- 》 框架vue,安哥拉 div 常用的标签 扩展标签 列表 ul/ol order——有序号 unordered——没序号的黑点 <!DOCTYPE html> <html><head><meta charset"…...

sqlsever 分布式存储查询
当数据存储在不同的服务器上的时候怎么取出来进行正常管连呢?比如你有 A 和B 两个服务器 里面存有两个表 分别是 A_TABLE、B_TABLE 其中 他们的关联关系是 ID 互相关联 1.创建链接服务器如果在B数据库要访问A数据库 那么 就在B数据库创建 -- 创建链接服务器 EXEC sp_addlink…...

deeponet(nature原文部分重点提取)
论文链接:Learning nonlinear operators via DeepONet based on the universal approximation theorem of operators | Nature Machine Intelligence 原文部分重点提取 DeepONets 会产生小的泛化误差 隐式类型算子还可以描述我们对其形式没有任何数学知识的系统 De…...

LeetCode【0036】有效的数独
本文目录 1 中文题目2 求解方法:python内置函数set2.1 方法思路2.2 Python代码2.3 复杂度分析 3 题目总结 1 中文题目 请根据以下规则判断一个 9 x 9 的数独是否有效。 数字 1-9 在每一行只能出现一次。数字 1-9 在每一列只能出现一次。数字 1-9 在每一个以粗实线…...

Typecho登陆与评论添加Geetest极验证,支持PJAX主题(如Handsome)
Typecho登陆与评论添加Geetest极验证,支持PJAX主题(如Handsome) 起因 最近垃圾评论比较多,为了防止一些机器人,我给博客添加了一些评论过滤机制,并为评论添加了验证码。 原本使用的插件是noisky/typecho…...

前端入门一之ES6--面向对象、够着函数和原型、继承、ES5新增方法、函数进阶、严格模式、高阶函数、闭包
前言 JS是前端三件套之一,也是核心,本人将会更新JS基础、JS对象、DOM、BOM、ES6等知识点,这篇是ES6;这篇文章是本人大一学习前端的笔记;欢迎点赞 收藏 关注,本人将会持续更新。 文章目录 JS高级 ES61、面向对象1.1…...

脑机接口、嵌入式 AI 、工业级 MR、空间视频和下一代 XR 浏览器丨RTE2024 空间计算和新硬件专场回顾
这一轮硬件创新由 AI 引爆,或许最大受益者仍是 AI,因为只有硬件才能为 AI 直接获取最真实世界的数据。 在人工智能与硬件融合的新时代,实时互动技术正迎来前所未有的创新浪潮。从嵌入式系统到混合现实,从空间视频到脑机接口&…...

RoseTTAFold MSA_emb类解读
MSA_emb 类的作用是对多序列对齐(MSA)数据进行嵌入编码,同时添加位置编码和查询编码(调用PositionalEncoding 和 QueryEncoding)以便为序列特征建模类。 源代码: class MSA_emb(nn.Module):def __init__(self, d_model=64, d_msa=21, p_drop=0.1, max_len=5000):super(…...

2411C++,C++26反射示例
参考 namespace __impl {template<auto... vals>struct replicator_type {template<typename F>constexpr void operator>>(F body) const {(body.template operator()<vals>(), ...);}};template<auto... vals>replicator_type<vals...>…...

Ubuntu上搭建Flink Standalone集群
Ubuntu上搭建Flink Standalone集群 本文部分内容转自如下链接。 环境说明 ubuntu 22.06 先执行apt-get update更新环境 第1步 安装JDK 通过apt自动拉取 openjdk8 apt-get install openjdk-8-jdk执行java -version,如果能显示Java版本号,表示安装并…...

C语言 精选真题2
题目要求:将形参s所指向的字符串转换为整数并且返回 知识点: 将字符1转化为整数1 int fun(char *s) {int flag1,n0; if(*s-) //先根据第一个符号来判断是正负;然后读取第二位{flag-1;s; }else if(*s){s;}while(*s>0&&…...

【健身SaaS厂商紧急预警】:AI Agent接入后用户留存率提升41%的关键3个埋点逻辑
更多请点击: https://kaifayun.com 第一章:AI Agent健身行业应用的范式迁移与价值重定义 传统健身服务长期受限于人力密度、响应延迟与个性化瓶颈,而AI Agent的深度介入正推动行业从“标准化课程交付”跃迁至“持续演化的健康共生体”。这一…...

为什么你的NotebookLM中文摘要总漏关键信息?3个被官方文档忽略的语言标记陷阱,90%用户正在踩坑
更多请点击: https://kaifayun.com 第一章:NotebookLM多语言支持 NotebookLM 原生支持多种语言的文档理解与对话生成,其底层模型经过多语言语料联合训练,可无缝处理中、英、日、韩、法、德、西等 20 种语言的混合输入。用户上传非…...

Pearcleaner:为什么这款开源工具是Mac用户清理应用残留的最佳选择?
Pearcleaner:为什么这款开源工具是Mac用户清理应用残留的最佳选择? 【免费下载链接】Pearcleaner A free, source-available and fair-code licensed mac app cleaner 项目地址: https://gitcode.com/gh_mirrors/pe/Pearcleaner 你是否曾注意到&a…...

VideoDownloadHelper:打破网页视频下载壁垒的智能解决方案
VideoDownloadHelper:打破网页视频下载壁垒的智能解决方案 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 你是否曾遇到过这样的困…...

网易2026年Q1财报:游戏增长背后,AI、跨端与全球化面临哪些挑战?
网易发布2026年Q1财报5月21日,网易发布2026年第一季度财报。大体上,网易呈现出基本面企稳、公司效率提升以释放利润的态势。财报显示,网易Q1净收入306亿元,同比增长6.1%,Non - GAAP归母净利润为107亿元。游戏及相关增值…...

EXCEL文件展示MLP的计算过程
MLP 实现步骤(共 5 步) 步骤 1:输入层数据准备 在表格中输入两个特征值 x1、x2,作为 MLP 的输入。本次使用:x10.5,x20.8步骤 2:设置网络参数(权重 偏置) 手动设置输入层…...

利用 Taotoken 的模型广场为你的智能客服场景挑选合适模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用 Taotoken 的模型广场为你的智能客服场景挑选合适模型 构建智能客服或对话系统时,一个核心挑战是如何从众多大模型…...

网络资源嗅探与下载技术实践:res-downloader跨平台解决方案
网络资源嗅探与下载技术实践:res-downloader跨平台解决方案 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 在当今…...

回归模型评估实战指南:从指标选择到业务决策
1. 这不是“背公式”手册,而是回归模型评估的实战决策地图 你训练完一个房价预测模型,R0.87,MAE2.3万,RMSE3.8万——然后呢?是立刻上线?还是再调参?还是换数据?还是干脆换算法&#…...

ESP32音频录制系统:构建智能声音采集的完整解决方案
ESP32音频录制系统:构建智能声音采集的完整解决方案 【免费下载链接】esp32_SoundRecorder ESP32 Sound recorder with simple code in arduino-esp32. (I2S interface) 项目地址: https://gitcode.com/gh_mirrors/es/esp32_SoundRecorder 在物联网和嵌入式系…...