[Codesys]常用功能块应用分享-BMOV功能块功能介绍及其使用实例说明
官方说明


功能说明
| 参数 | 类型 | 功能 |
| pbyDataSrc | POINTER TO BYTE | 指向源数组指针 |
| uiSize | UINT | 要移动数据的BYTE数 |
| pbyDataDes | POINTER TO BYTE | 指向目标数组指针 |
实例应用-ST
IF SYSTEM_CLOCK.AlwaysTrue THENCASE iAutoState OF0: //读写完成信号在下次读写信号的上升沿或复位信号的下降沿清除ClearRtrig(CLK:=(ReadCmd OR WriteCmd)AND OPMODE.User_Interface_OUT.Reset=FALSE,Q=>TrigClearQ);IF TrigClearQ THENRW_Done:=FALSE;RFID_ReadCmd_Mid:=FALSE;RFID_WriteCmd_Mid:=FALSE;iStartAddrChangebale:=0;RfidBaseReset:=TRUE;END_IFIF RW_Done=FALSE AND iRfidBaseState=10 AND iStartAddrChangebale=0 THENRfidBaseReset:=FALSE;iAutoState:=5;END_IF 5:IF ReadCmd=TRUE AND WriteCmd=FALSE AND TagPresent=TRUE AND RWHeadNotConnected=FALSE AND RfidErr=FALSE THENRFID_ReadCmd_Mid:=TRUE;RFID_WriteCmd_Mid:=FALSE;iAutoState:=10;ELSIF ReadCmd=FALSE AND WriteCmd=TRUE AND TagPresent=TRUE AND RWHeadNotConnected=FALSE AND RfidErr=FALSE THENiAutoState:=100;ELSIF (ReadCmd=TRUE OR WriteCmd=TRUE) AND TagPresent=FALSE THENRFID_ReadCmd_Mid:=FALSE;RFID_WriteCmd_Mid:=FALSE;TagNotExitAlarm:=TRUE;iAutoState:=200;ELSIF (ReadCmd=TRUE OR WriteCmd=TRUE) AND RWHeadNotConnected=TRUE THENRFID_ReadCmd_Mid:=FALSE;RFID_WriteCmd_Mid:=FALSE;RfidNotHeaderAlarm:=TRUE;iAutoState:=200;END_IF10://RFID DATA READ CONTROLIF Done=TRUE AND RfidErr=FALSE THENiStartAddrChangebale:=iStartAddr;BMOV(pbyDataSrc:=pRdSrcMid , uiSize:=128 , pbyDataDes:=pRdOne);ELSIF RfidErr THENGeneralAlarm:=TRUE;END_IFIF Done=TRUE AND GeneralAlarm =FALSE THENiAutoState:=20;ELSIF GeneralAlarm=TRUE THEN iAutoState:=200;END_IF20:IF GeneralAlarm=FALSE AND RFID_ReadCmd_Mid=TRUE AND RFID_WriteCmd_Mid=FALSE THENRFID_ReadCmd_Mid :=FALSE;RFID_WriteCmd_Mid:=FALSE;ELSIF GeneralAlarm=FALSE AND RFID_ReadCmd_Mid=FALSE AND RFID_WriteCmd_Mid=FALSE THEN iAutoState:=30;END_IF30:IF AutoRdCmd=TRUE AND AutoWrCmd=FALSE AND TagPresent=TRUE AND RfidErr=FALSE THENRFID_ReadCmd_Mid:=TRUE;RFID_WriteCmd_Mid:=FALSE;iAutoState:=40;END_IF40:IF Done=TRUE AND RfidErr=FALSE THENiStartAddrChangebale:=iStartAddr+128;BMOV(pbyDataSrc:=pRdSrcMid , uiSize:=128 , pbyDataDes:=pRdTwo);ELSIF RfidErr THENGeneralAlarm:=TRUE;END_IFIF Done=TRUE AND GeneralAlarm =FALSE THENiAutoState:=50;ELSIF GeneralAlarm=TRUE THEN iAutoState:=200;END_IF50:IF GeneralAlarm=FALSE AND RFID_ReadCmd_Mid=TRUE AND RFID_WriteCmd_Mid=FALSE THENRFID_ReadCmd_Mid :=FALSE;RFID_WriteCmd_Mid:=FALSE;ELSIF GeneralAlarm=FALSE AND RFID_ReadCmd_Mid=FALSE AND RFID_WriteCmd_Mid=FALSE THEN iAutoState:=60;END_IF60:IF AutoRdCmd=TRUE AND AutoWrCmd=FALSE AND TagPresent=TRUE AND RfidErr=FALSE THENRFID_ReadCmd_Mid:=TRUE;RFID_WriteCmd_Mid:=FALSE;iAutoState:=70;END_IF 70:IF Done=TRUE AND RfidErr=FALSE THENiStartAddrChangebale:=iStartAddr+256;BMOV(pbyDataSrc:=pRdSrcMid , uiSize:=128 , pbyDataDes:=pRdThree);ELSIF RfidErr THENGeneralAlarm:=TRUE;END_IFIF Done=TRUE AND GeneralAlarm =FALSE THENiAutoState:=80;ELSIF GeneralAlarm=TRUE THEN iAutoState:=200;END_IF80://RFID DATA READ FINISHE RETURNIF GeneralAlarm=FALSE THENRW_Done:=TRUE;RFID_ReadCmd_Mid :=FALSE;RFID_WriteCmd_Mid:=FALSE;iStartAddrChangebale:=0;iAutoState:=0;END_IF100://RFID DATA WRITE CONTROLIF AutoRdCmd=FALSE AND AutoWrCmd=TRUE THENiStartAddrChangebale:=iStartAddr;BMOV(pbyDataSrc:=pWrOne , uiSize:=128 , pbyDataDes:=pWrSrcMid);RFID_ReadCmd_Mid :=FALSE;RFID_WriteCmd_Mid:=TRUE;iAutoState:=105;END_IF105:IF Done=TRUE AND RfidErr=FALSE THENGeneralAlarm:=FALSE;ELSIF RfidErr THENGeneralAlarm:=TRUE;END_IFIF Done=TRUE AND GeneralAlarm =FALSE THENRFID_ReadCmd_Mid :=FALSE;RFID_WriteCmd_Mid:=FALSE;iAutoState:=110;ELSIF GeneralAlarm=TRUE THEN iAutoState:=200;END_IF110:IF AutoRdCmd=FALSE AND AutoWrCmd=TRUE THENiStartAddrChangebale:=iStartAddr+128;BMOV(pbyDataSrc:=pWrTwo , uiSize:=128 , pbyDataDes:=pWrSrcMid);RFID_ReadCmd_Mid :=FALSE;RFID_WriteCmd_Mid:=TRUE;iAutoState:=115;END_IF115:IF Done=TRUE AND RfidErr=FALSE THENGeneralAlarm:=FALSE;ELSIF RfidErr THENGeneralAlarm:=TRUE;END_IFIF Done=TRUE AND GeneralAlarm =FALSE THENRFID_ReadCmd_Mid :=FALSE;RFID_WriteCmd_Mid:=FALSE;iAutoState:=120;ELSIF GeneralAlarm=TRUE THEN iAutoState:=200;END_IF120:IF AutoRdCmd=FALSE AND AutoWrCmd=TRUE THENiStartAddrChangebale:=iStartAddr+256;BMOV(pbyDataSrc:=pWrThree , uiSize:=128 , pbyDataDes:=pWrSrcMid);RFID_ReadCmd_Mid :=FALSE;RFID_WriteCmd_Mid:=TRUE;iAutoState:=125;END_IF125:IF Done=TRUE AND RfidErr=FALSE THENGeneralAlarm:=FALSE;ELSIF RfidErr THENGeneralAlarm:=TRUE;END_IFIF Done=TRUE AND GeneralAlarm =FALSE THENRFID_ReadCmd_Mid :=FALSE;RFID_WriteCmd_Mid:=FALSE;iAutoState:=130;ELSIF GeneralAlarm=TRUE THEN iAutoState:=200;END_IF130://RFID DATA WRITE FINISHE RETURNIF GeneralAlarm=FALSE THENRW_Done:=TRUE;RFID_ReadCmd_Mid :=FALSE;RFID_WriteCmd_Mid:=FALSE;iStartAddrChangebale:=0;iAutoState:=0;END_IF200://RFID DATA WRITE OR READ ALARMIF OPMODE.User_Interface_OUT.Reset THENGeneralAlarm:=FALSE;TagNotExitAlarm:=FALSE;RfidNotHeaderAlarm:=FALSE;RFID_ReadCmd_Mid:=FALSE;RFID_WriteCmd_Mid:=FALSE;RW_Done:=FALSE;iStartAddrChangebale:=0;iAutoState:=0;END_IFEND_CASE
END_IF实例应用-LD






数据操作功能块封装
功能块封装功能类似数据库读写操作,自动读写数据和手动读写数据,访问二维数组中的数据操作。可通过二维数组的行列访问目标数据或通过指针访问目标数组。
以后有时间会抽时间分享一些TIA和Codesys的常用功能块使用方法。
相关文章:
[Codesys]常用功能块应用分享-BMOV功能块功能介绍及其使用实例说明
官方说明 功能说明 参数 类型 功能 pbyDataSrcPOINTER TO BYTE指向源数组指针uiSizeUINT要移动数据的BYTE数pbyDataDesPOINTER TO BYTE指向目标数组指针 实例应用-ST IF SYSTEM_CLOCK.AlwaysTrue THENCASE iAutoState OF0: //读写完成信号在下次读写信号的上升沿或复位信号…...
)
大语言模型通用能力排行榜(2024年11月8日更新)
数据来源SuperCLUE 榜单数据为通用能力排行榜 排名 模型名称 机构 总分 理科 文科 Hard 使用方式 发布日期 - o1-preview OpenAI 75.85 86.07 76.6 64.89 API 2024年11月8日 - Claude 3.5 Sonnet(20241022) Anthropic 70.88 82.4…...

信息技术引领未来:大数据治理的实践与挑战
信息技术引领未来:大数据治理的实践与挑战 在信息技术日新月异的今天,大数据已成为企业和社会发展的重要驱动力。大数据治理,作为确保数据质量、安全性和合规性的关键环节,正面临着前所未有的实践挑战与机遇。本文将探讨信息技术…...

Git 分⽀规范 Git Flow 模型
前言 GitFlow 是一种流行的 Git 分支管理策略,由 Vincent Driessen 在 2010 年提出。它提供了一种结构化的方法来管理项目的开发、发布和维护,特别适合大型和复杂的项目。GitFlow 定义了一套明确的分支模型和工作流程,使得团队成员可以更有效…...
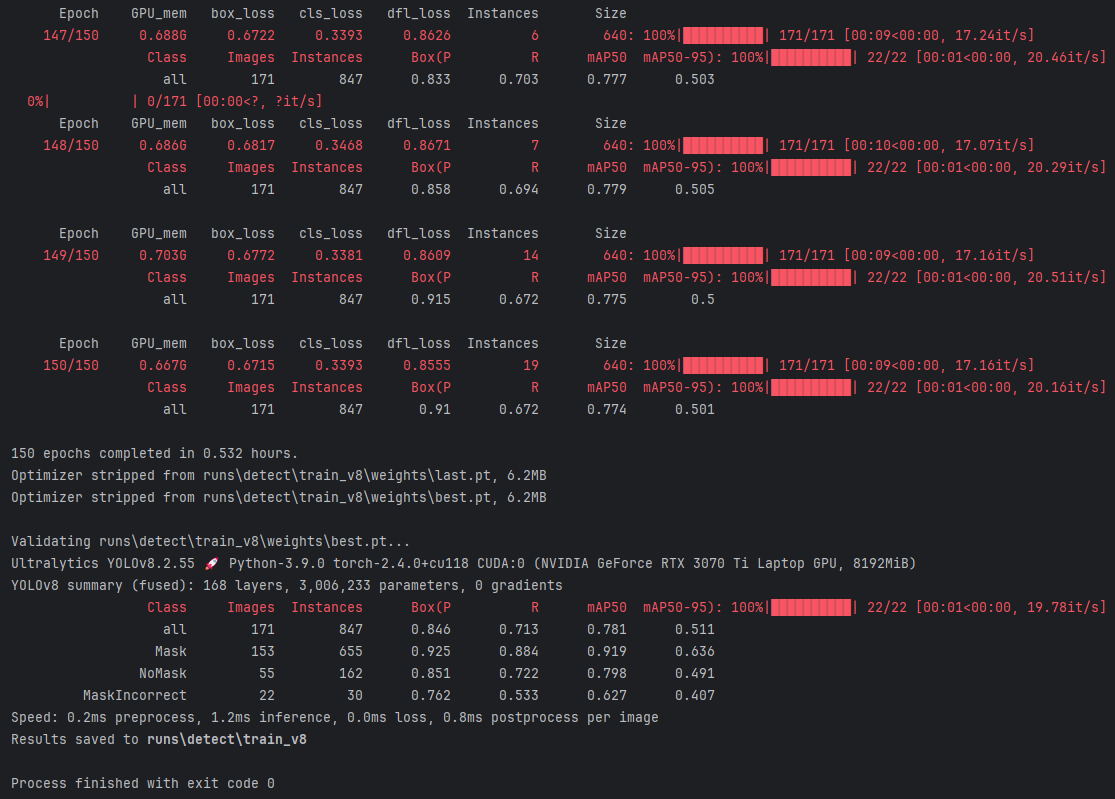
基于YOLOv8深度学习的公共卫生防护口罩佩戴检测系统(PyQt5界面+数据集+训练代码)
在全球公共卫生事件频发的背景下,防护口罩佩戴检测成为保障公众健康和控制病毒传播的重要手段之一。特别是在人员密集的公共场所,例如医院、学校、公共交通工具等地,口罩的正确佩戴对降低病毒传播风险、保护易感人群、遏制疫情扩散有着至关重…...

Nature Communications 基于触觉手套的深度学习驱动视触觉动态重建方案
在人形机器人操作领域,有一个极具价值的问题:鉴于操作数据在人形操作技能学习中的重要性,如何有效地从现实世界中获取操作数据的完整状态?如果可以,那考虑到人类庞大规模的人口和进行复杂操作的简单直观性与可扩展性&a…...

构建SSH僵尸网络
import argparse import paramiko# 定义一个名为Client的类,用于表示SSH客户端相关操作 class Client:# 类的初始化方法,接收主机地址、用户名和密码作为参数def __init__(self, host, user, password):self.host hostself.user userself.password pa…...

WPF中MVVM工具包 CommunityToolkit.Mvvm
CommunityToolkit.Mvvm,也称为MVVM工具包,是Microsoft Community Toolkit的一部分。它是一个轻量级但功能强大的MVVM(Model-View-ViewModel)库,旨在帮助开发者更容易地实现MVVM设计模式。 特点 独立于平台和运行时&a…...

学习空闲任务函数
一、user_StopEnterTask 停止 进入任务 /* Private includes -----------------------------------------------------------*/ //includes #include "user_TasksInit.h" #include "user_MPUCheckTask.h"#include "ui.h" #include "ui_Hom…...
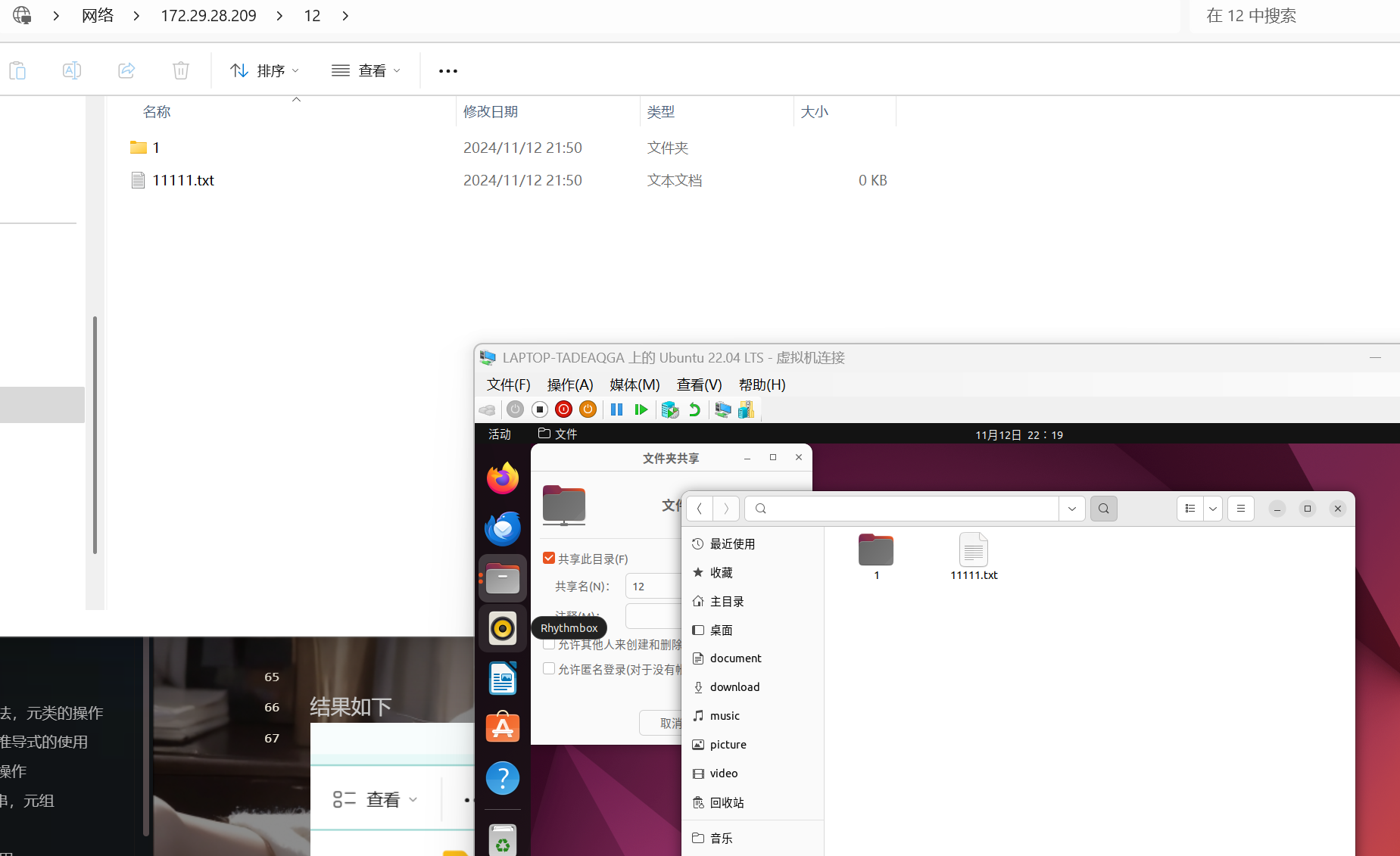
Hyper-v中ubuntu与windows文件共享
Hyper-v中ubuntu与windows文件共享 前言相关链接第一步--第一个链接第二步--第二个链接测试与验证 前言 关于Hyper-V的共享我搞了好久,网上的很多教程太过冗余,我直接采用最简单的办法吧 相关链接 Hyper-V中Ubuntu 同windows系统共享文件夹-百度经验 …...

【软件工程】一篇入门UML建模图(类图)
🌈 个人主页:十二月的猫-CSDN博客 🔥 系列专栏: 🏀软件开发必练内功_十二月的猫的博客-CSDN博客 💪🏻 十二月的寒冬阻挡不了春天的脚步,十二点的黑夜遮蔽不住黎明的曙光 目录 1. 前…...

Windows 安装Docker For Desktop概要
Windows 安装docker 下载部分的工作需要使用科学技术。如果没有可以联系博主发送已下载好的文件。 本文档不涉及技术的讲解,仅有安装的步骤。 准备工作 包含下载与环境准备,下载的文件仅下载,在后续步骤进行安装。 微软关于wsl的文档&…...

解决循环依赖报错问题
Caused by: org.springframework.beans.factory.BeanCurrentlyInCreationException: Error creating bean with name ‘asyncTaskServiceImpl’: Bean with name ‘asyncTaskServiceImpl’ has been injected into other beans [resignServiceImpl] in its raw version as part…...

代码随想录第46期 单调栈
这道题主要是单调栈的简单应用 class Solution { public:vector<int> dailyTemperatures(vector<int>& T) {vector<int> result(T.size(),0);stack<int> st;st.push(0);for(int i1;i<T.size();i){if(T[i]<T[st.top()]){st.push(i);}else{wh…...

中仕公考怎么样?事业编面试不去有影响吗?
事业编考试笔试已经通过,但是面试不去参加会有影响吗? 1. 自动放弃面试资格:未能按时出席事业单位的面试将被视为主动放弃该岗位的竞争机会。 2. 个人信誉问题:面试作为招聘流程的关键步骤,无故缺席可能被解释为诚信…...

OMV7 树莓派 tf卡安装
升级7之后,问题多多,不是docker不行了,就是代理不好使 今天又重装了一遍,用官方的链接,重新再折腾一遍…… 使用raspberry pi imager安装最新版lite OS。 注意是无桌面 Lite版 配置好树莓派初始化设置࿰…...
Go语言中的SpringMVC框架——Gin)
Go语言24小时极速学习教程(五)Go语言中的SpringMVC框架——Gin
作为一个真正能用的企业级应用,怎么能缺少RESTful接口呢?所以我们需要尝试在Go语言环境中写出我们的对外接口,这样前端就可以借由Gin框架访问我们数据库中的数据了。 一、Gin框架的使用 1. 安装 Gin 首先,你需要在你的 Go 项目…...
【汇编】c++游戏开发
由一起学编程创作的‘C/C项目实战:2D射击游戏开发(简易版), 440 行源码分享来啦~’: C/C项目实战:2D射击游戏开发(简易版), 440 行源码分享来啦~_射击c-CSDN博客文章浏览…...

Android Studio | 修改镜像地址为阿里云镜像地址,启动App
在项目文件的目录下的 settings.gradle.kts 中修改配置,配置中包含插件和依赖项 pluginManagement {repositories {maven { urluri ("https://www.jitpack.io")}maven { urluri ("https://maven.aliyun.com/repository/releases")}maven { urlu…...

Rocky linux8 安装php8.0
Rocky linux8 安装php8.0 1.安装remi源2.列出php版本3.变更php版本,Rocky8有提供php8版本,所以切换Rocky8提供的版本,而不是remi提供的版本,不过remi有提供php8.1和php8.2版本。4.切换成remi提供的8.0版本5.安装phpendl 1.安装rem…...

3步视频PPT智能提取:告别繁琐截图,拥抱自动化高效工作流
3步视频PPT智能提取:告别繁琐截图,拥抱自动化高效工作流 【免费下载链接】extract-video-ppt extract the ppt in the video 项目地址: https://gitcode.com/gh_mirrors/ex/extract-video-ppt 还在为从视频中手动截取PPT幻灯片而烦恼吗࿱…...

BG3ModManager:博德之门3模组管理终极指南,告别模组冲突烦恼![特殊字符]
BG3ModManager:博德之门3模组管理终极指南,告别模组冲突烦恼!🚀 【免费下载链接】BG3ModManager A mod manager for Baldurs Gate 3. This is the only official source! 项目地址: https://gitcode.com/gh_mirrors/bg/BG3ModMa…...

Sonos语音控制功能大揭秘:常用指令、局限与第三方助手对比
ZDNET核心要点Sonos音箱内置语音助手,其语音控制虽不如其他助手智能,但并非一无是处,每日闹钟、天气预报和定时器能提升使用体验。Sonos语音控制使用体验并非智能家居爱好者,但家里有好几台Sonos智能音箱。虽不太喜欢自动语音助手…...

BetterGI:解放双手的终极原神自动化助手,每天节省2小时游戏时间
BetterGI:解放双手的终极原神自动化助手,每天节省2小时游戏时间 【免费下载链接】better-genshin-impact 📦BetterGI 更好的原神 - 自动拾取 | 自动剧情 | 全自动钓鱼(AI) | 全自动七圣召唤 | 自动伐木 | 自动刷本 | 自动采集/挖矿/锄地 | 一…...

OpenClaw AI助手公网部署安全加固实战:从SSH防护到成本优化
1. 项目概述:为你的AI助手穿上“防弹衣” 如果你正在一台VPS或云服务器上运行OpenClaw(或者说Clawdbot),并且隐隐觉得“把能执行Shell命令的AI直接暴露在公网上”这事儿有点“刺激”,那你的直觉是对的。这感觉就像把自…...

从FinFET到3D-IC:2013年预测如何塑造了今天的低功耗与异构计算设计
1. 项目概述:站在2013年初的十字路口十多年前,2013年初的那个冬天,整个半导体与电子设计自动化行业弥漫着一种既兴奋又焦虑的复杂情绪。当时,我作为行业里的一名技术编辑,向数十位来自芯片设计公司、EDA工具供应商、IP…...

GitLab实战指南:从零到一的团队协作与项目管理
1. GitLab入门:从注册到组织搭建 第一次接触GitLab时,很多人会被它丰富的功能搞得晕头转向。作为一个长期使用GitLab管理技术团队的老鸟,我想分享一套真正实用的入门方法。GitLab本质上是一个集代码托管、项目管理、CI/CD于一体的DevOps平台&…...

Python轻量级Web框架fws:从核心原理到RESTful API实战
1. 项目概述:一个轻量级、可扩展的Web服务框架在构建现代Web应用时,我们常常面临一个选择:是使用功能全面但可能略显臃肿的成熟框架,还是从零开始,只为满足特定需求而构建一个精简的解决方案?前者提供了开箱…...

多模态AI处理利器:基于MCP协议的Stitch-Pro服务器架构解析
1. 项目概述:一个面向多模态内容处理的“缝合”利器 最近在折腾一个挺有意思的开源项目,叫 stitch-pro-mcp 。这个名字挺直白,“stitch”是缝合,“pro”是专业版,“mcp”则指向了“模型上下文协议”。简单来说&#…...
)
不止于建模:用COMSOL几何操作优化你的仿真效率(分隔、二维轴对称实战)
不止于建模:用COMSOL几何操作优化你的仿真效率 在工程仿真领域,几何建模往往被视为前期准备工作,但真正的高手知道:建模阶段的每一个决策都会在后续网格划分和求解过程中产生指数级影响。我们曾对比过两个相似的电机散热模型——一…...