基于MATLAB的激光雷达与相机联合标定原理及实现方法——以标定板为例
1.为什么要进行激光雷达和相机的联合标定?
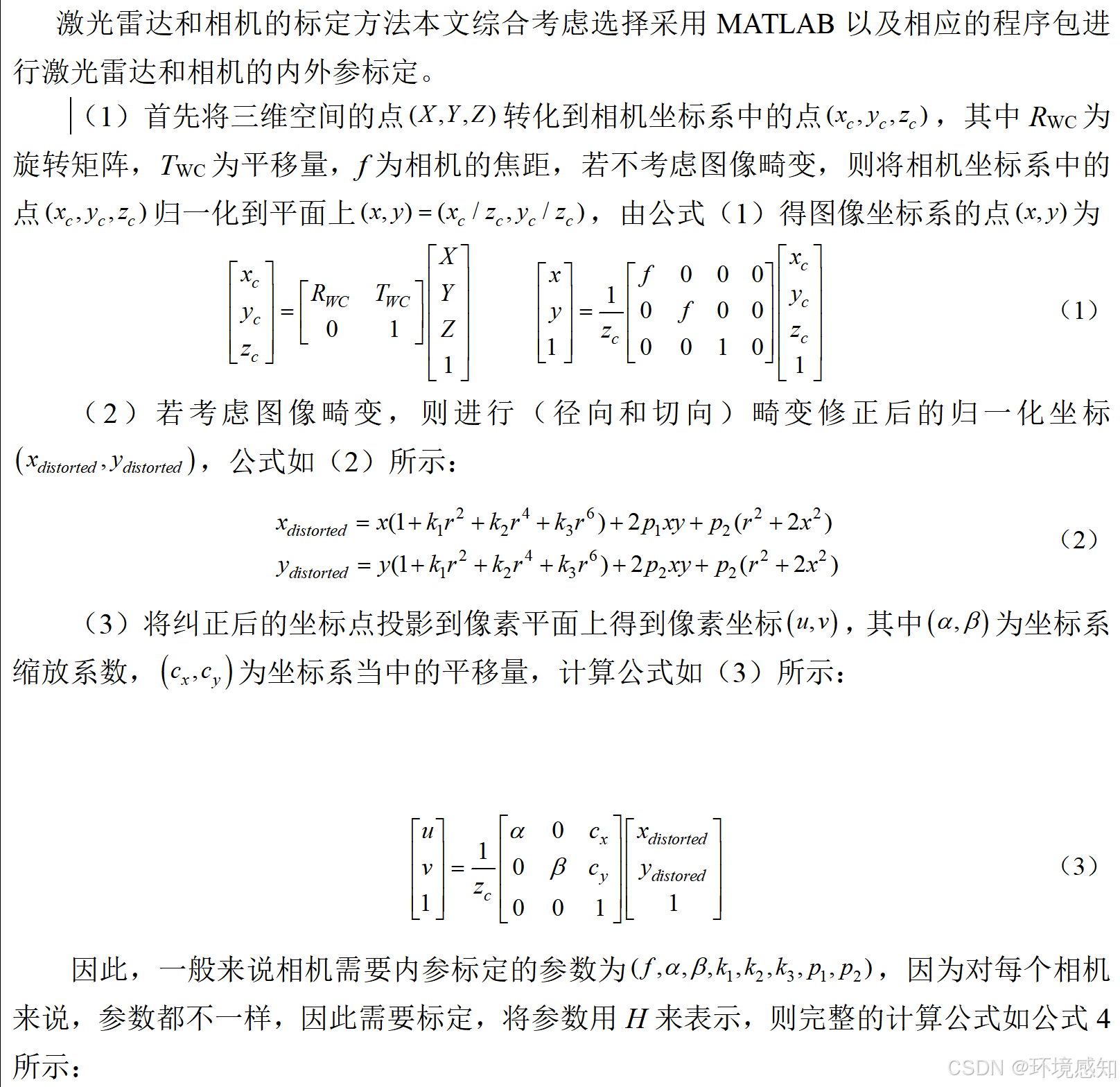
激光雷达和相机的联合标定是为了将两种传感器的数据统一到同一坐标系中,从而实现更准确的环境感知。激光雷达提供精准的三维距离信息,而相机捕捉丰富的纹理和颜色,通过联合标定可以结合两者优势,弥补单一传感器的不足。标定过程确定激光雷达与相机之间的相对位置和姿态,支持多传感器融合任务,如目标检测、三维重建和语义分割,提高系统的感知精度和鲁棒性,是自动驾驶和机器人导航中不可或缺的一环。
2.激光雷达和相机联合标定的原理是什么?
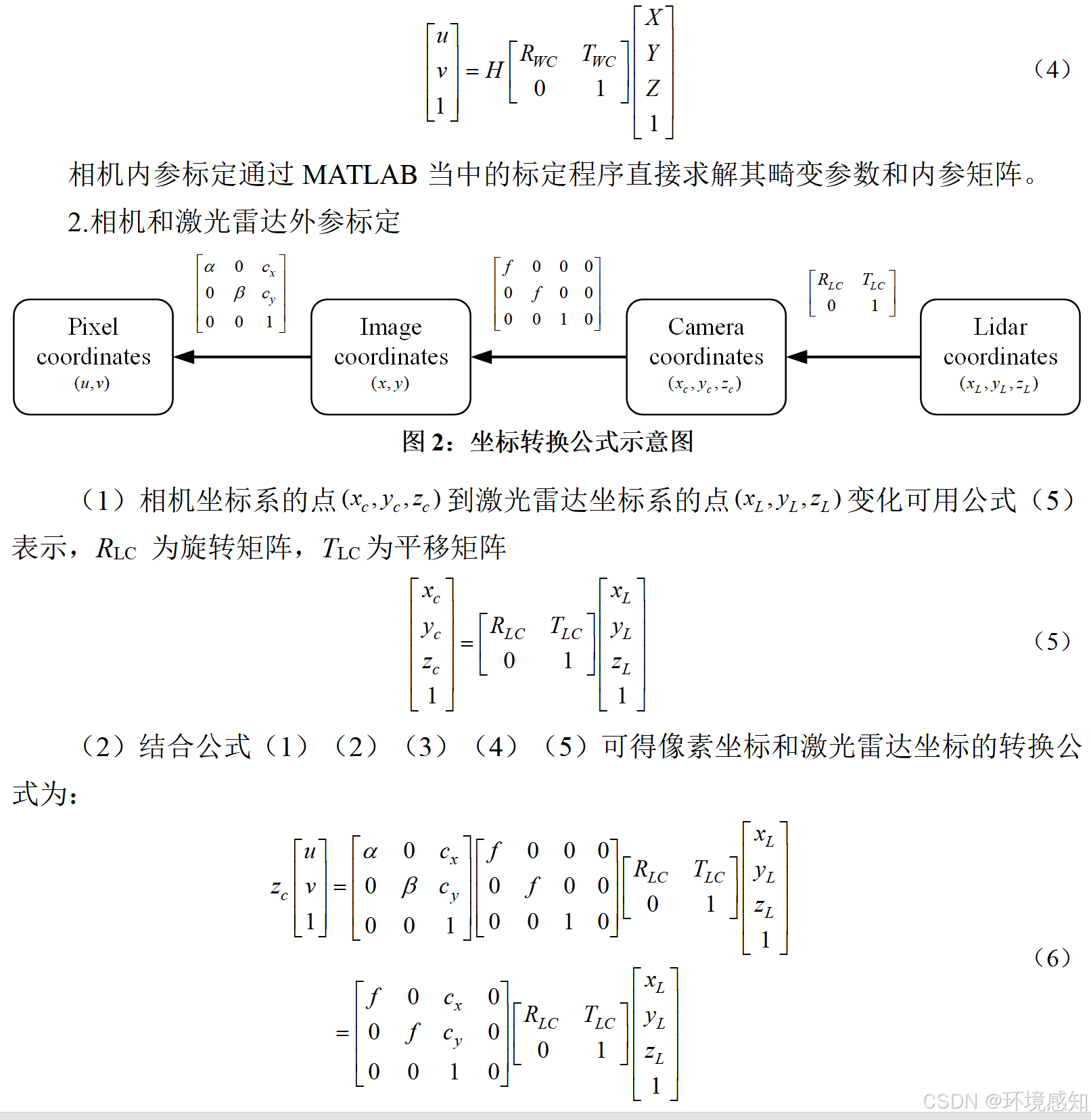
所以一般相机和激光雷达的联合标定就是要求其旋转矩阵和平移矩阵。大概就是这个过程,如果有不太清楚的,同时又想进一步研究的可以参考这个博客:激光雷达和相机联合标定_相机激光雷达联合标定-CSDN博客
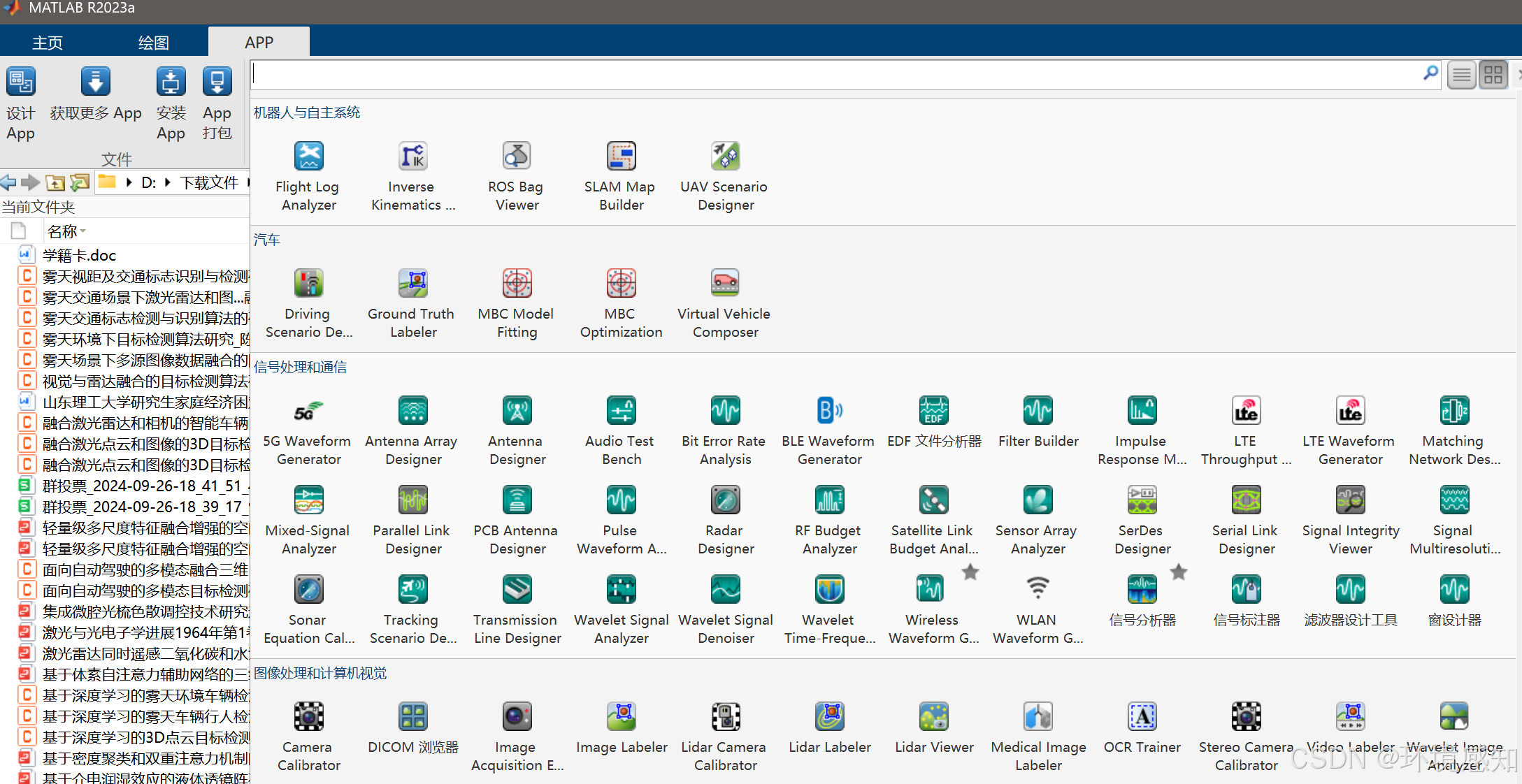
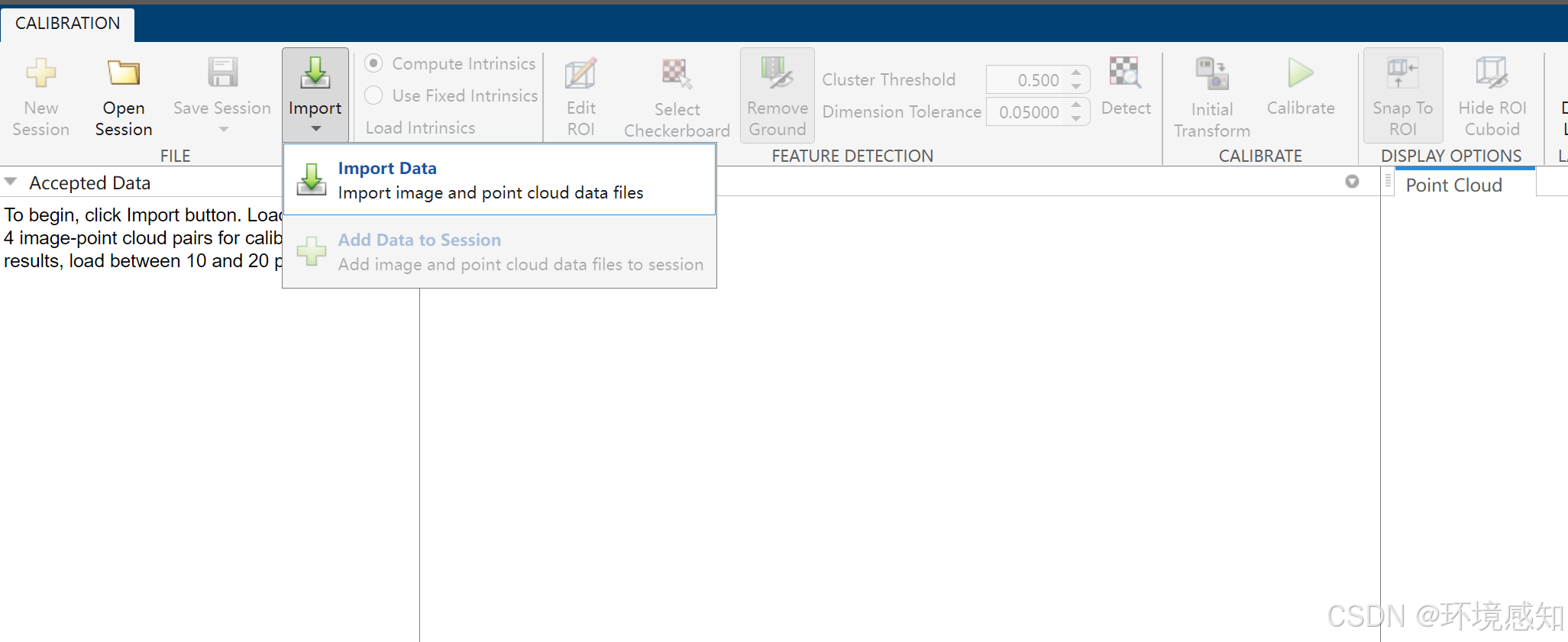
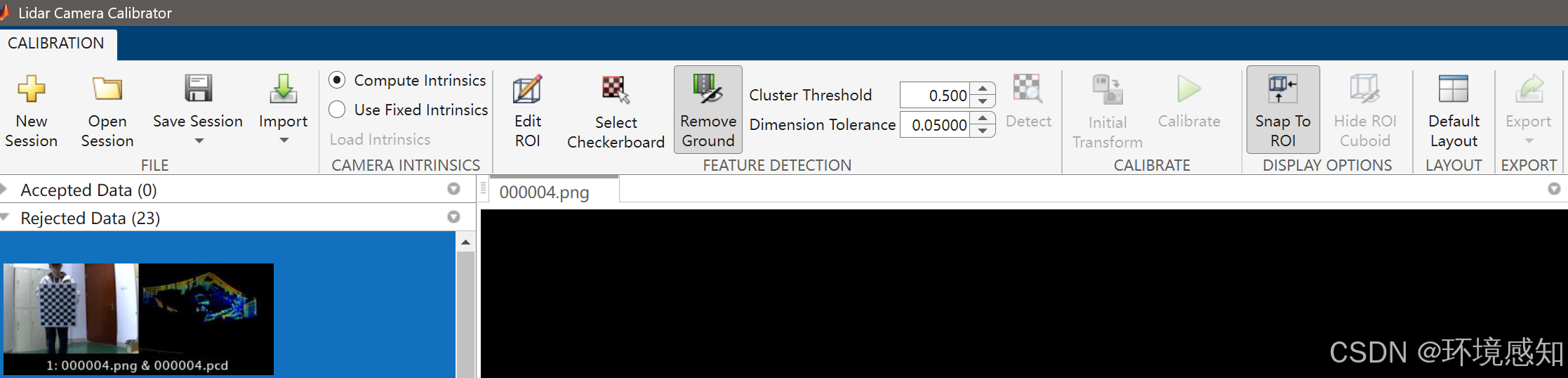
3.该如何实现呢?首先打开MATLAB,点击APP-图像处理和计算机视觉-Lidar Camera Calibrator
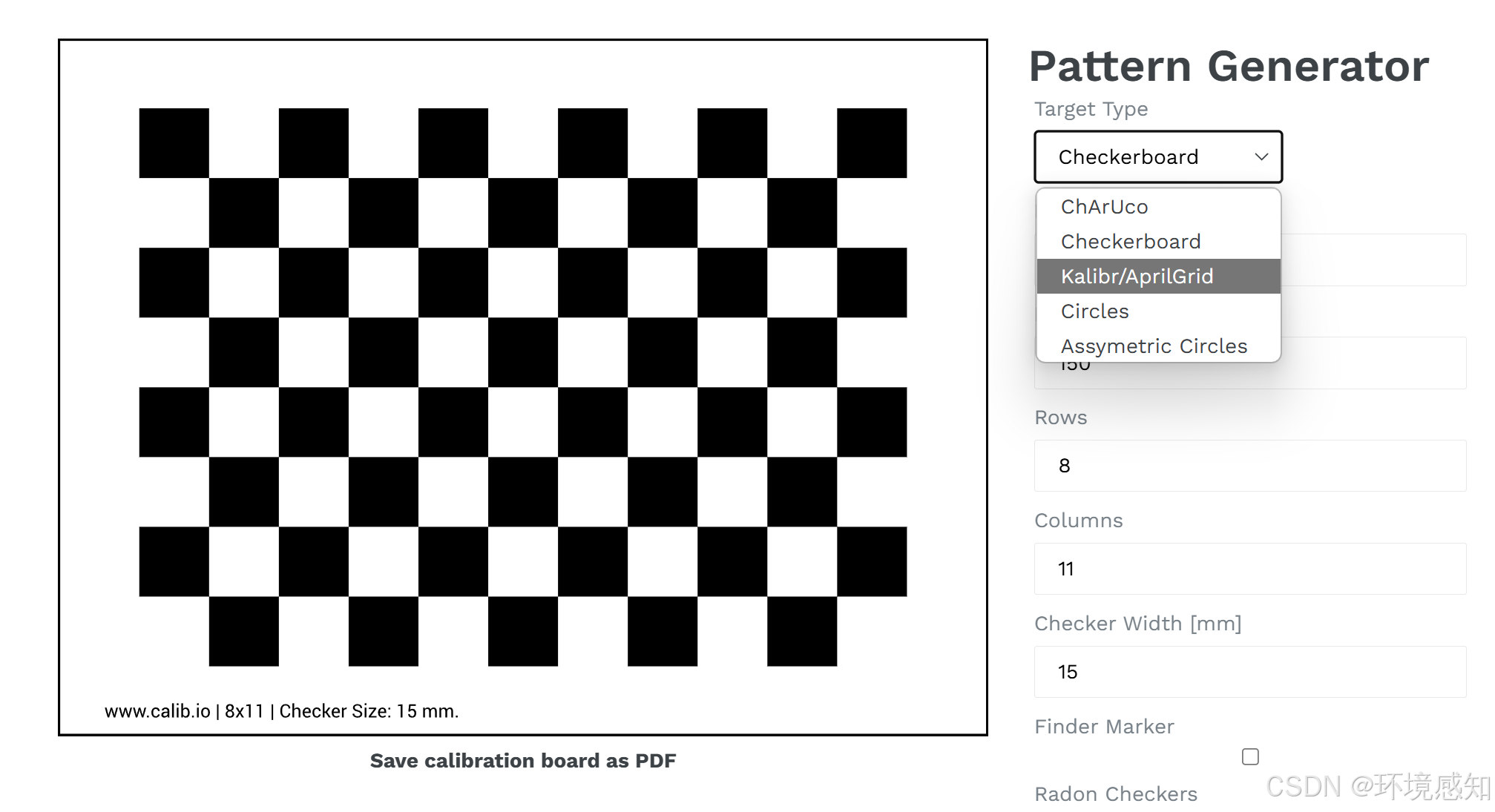
4.关于标定板的制作 ,可以参考以下网址:Camera Calibration Pattern Generator – calib.io![]() https://calib.io/pages/camera-calibration-pattern-generator
https://calib.io/pages/camera-calibration-pattern-generator
这里面可以设置标定板的格式以及大小:
5. 关于数据的选择,这里以bag包为例首先将bag包转换成png图片和pcd点云文件,怎么转换可以参考另一篇博客:(二)利用Tools_RosBag2KITTI软件包将ubuntu当中自己录制的.bag文件转成.bin文件和.png文件(附修改后的代码)
6.接着点击 import data选择准换好的png和bin文件,这俩可以放在一个文件夹。
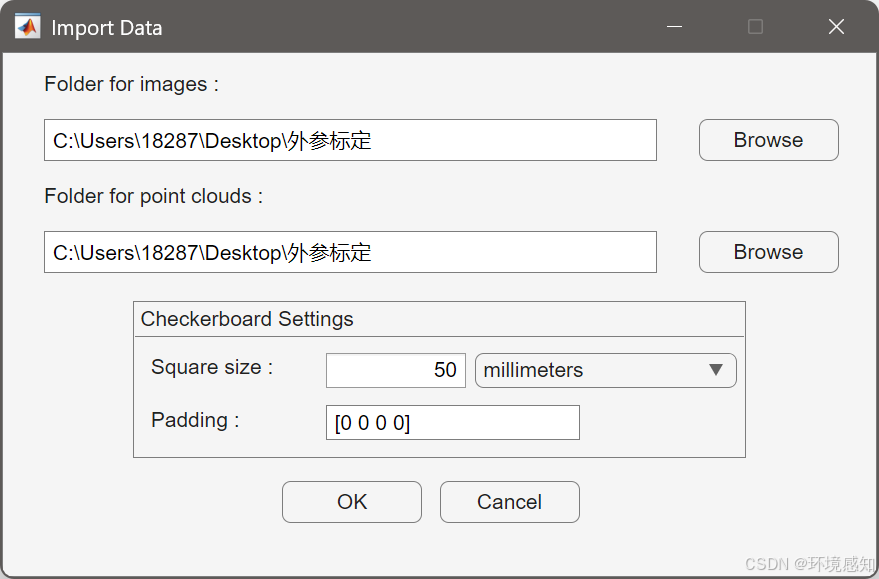
7.之后选择文件夹的路径以及标定板的大小:
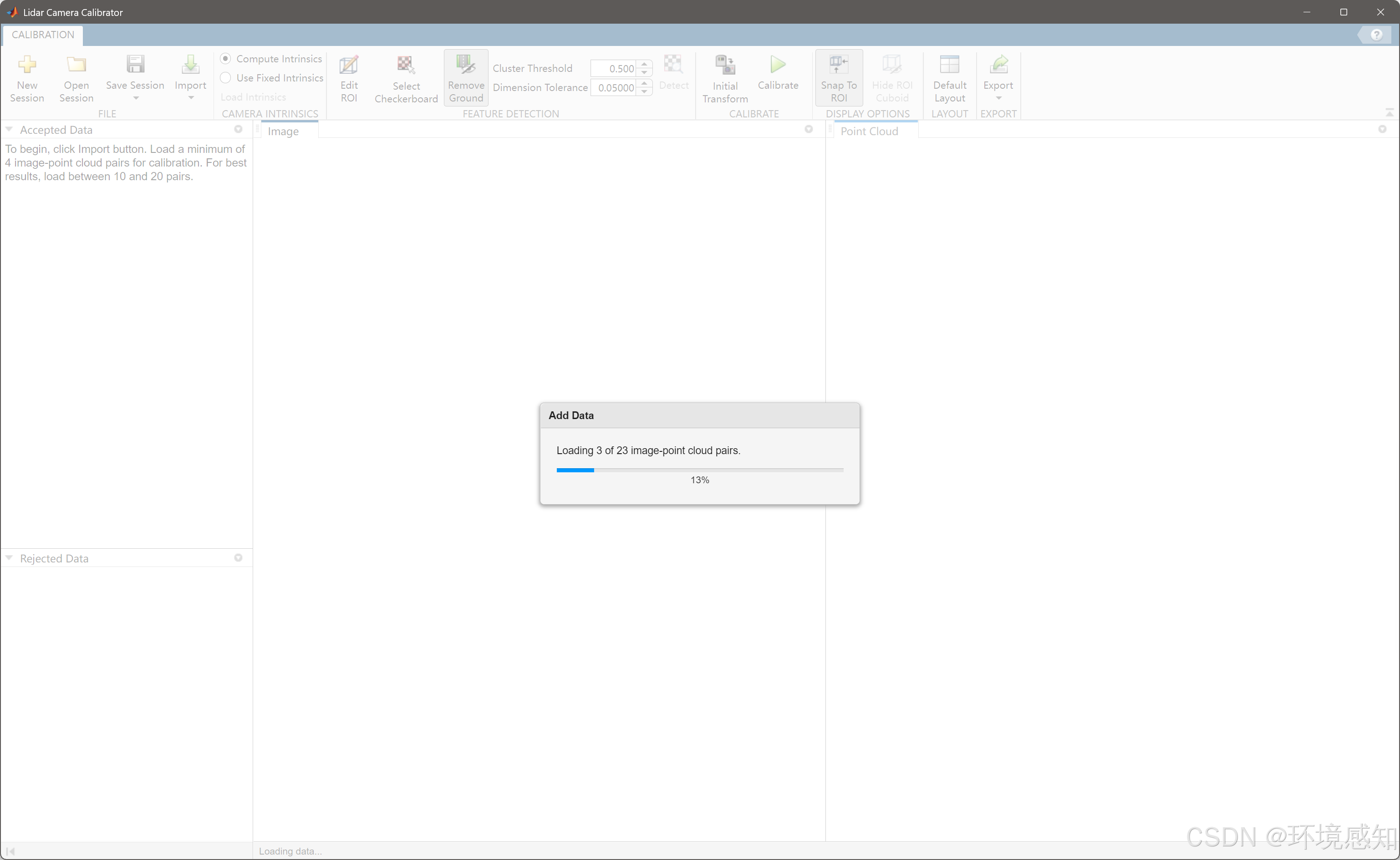
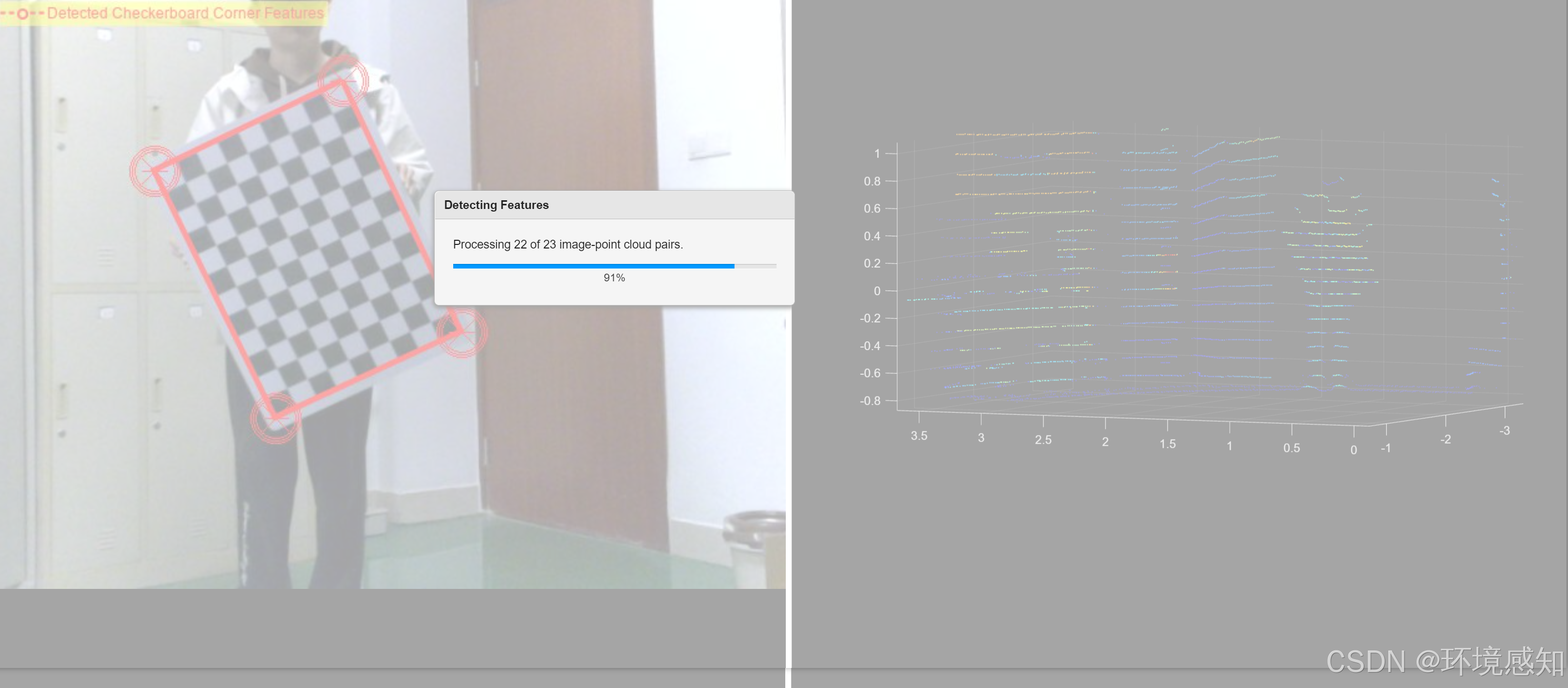
8, 之后开始自动加载相应的文件内容:
9, 之后会提示找不到标定板数据,不要慌,这是正常的,裁剪设置之后就可以了。
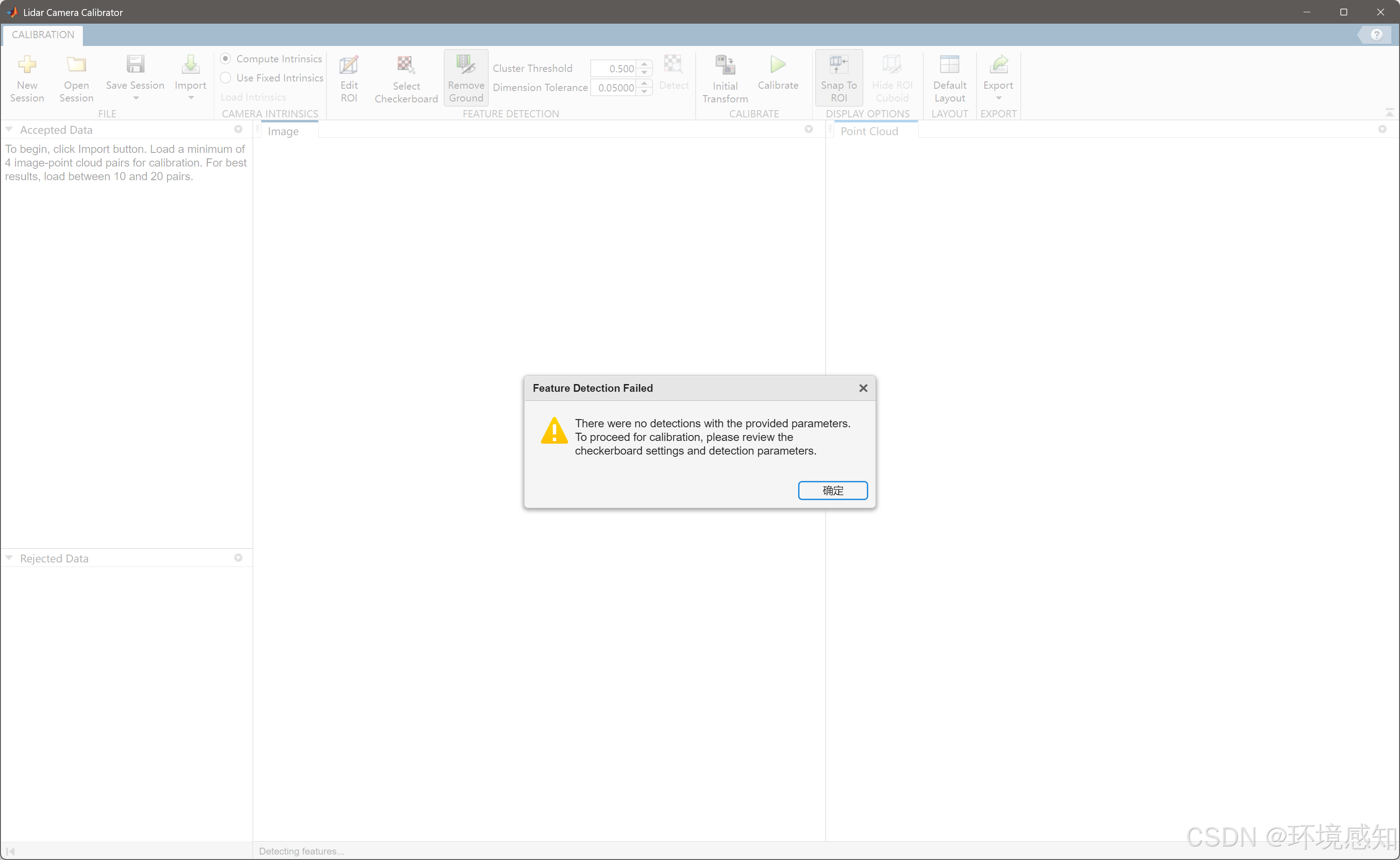
10, 一方面可以降低DimensionTolerance'的值(即点云检测边框精度)来提高标定板检测成功率。
11.也可以点击Edit ROI编辑点云图像,只保留标定板,编辑好了一定要保存。
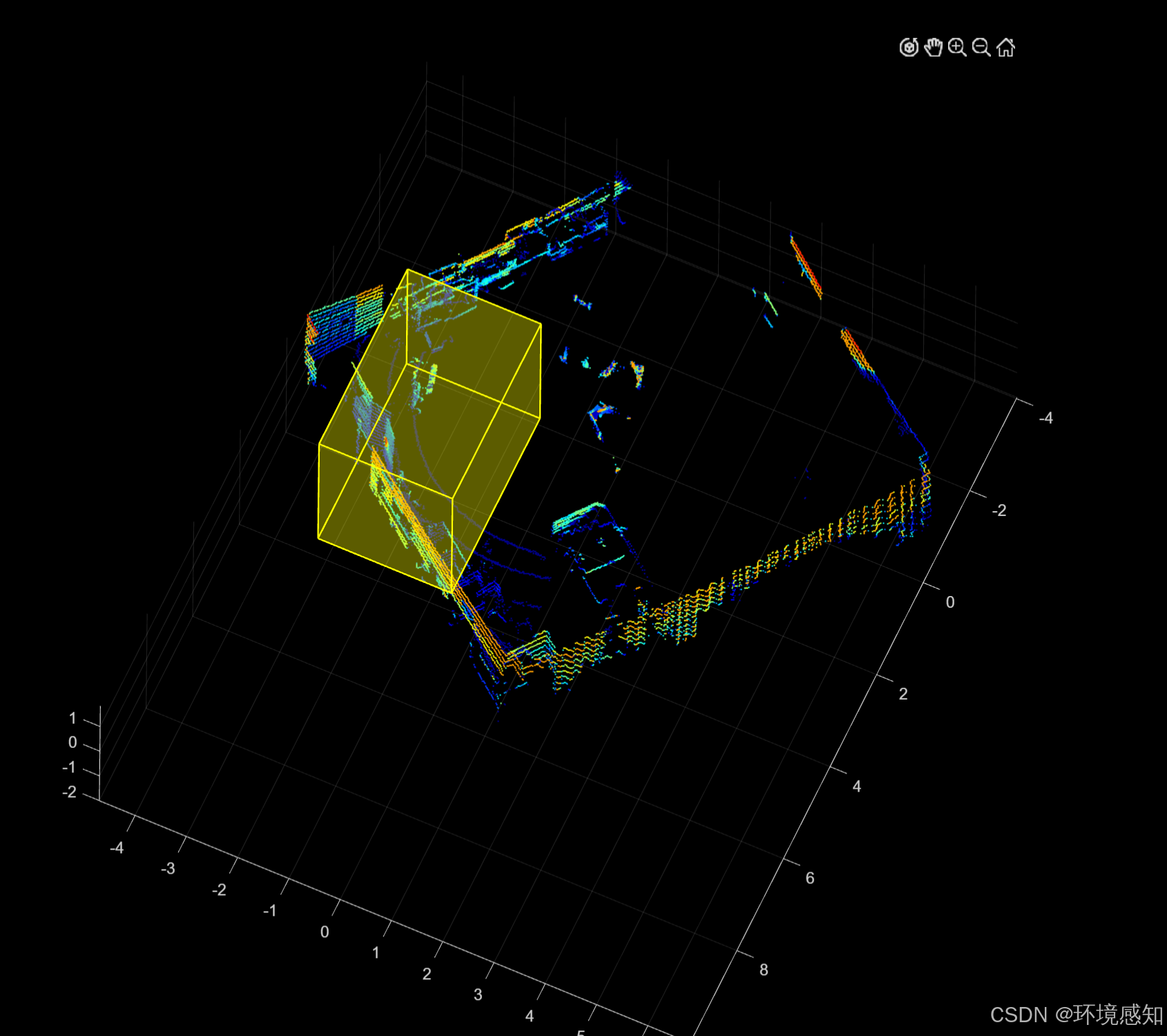
12.操作可能有点不习惯,右上角第一个是旋转,第二个是移动,当两者都不亮时才是默认的拉伸,保存后退出,如下图所示:
13.接下来呢,选择Select Checkerboard进行标定板的选择,每一张图片都需要按照上以下步骤重复所有的操作
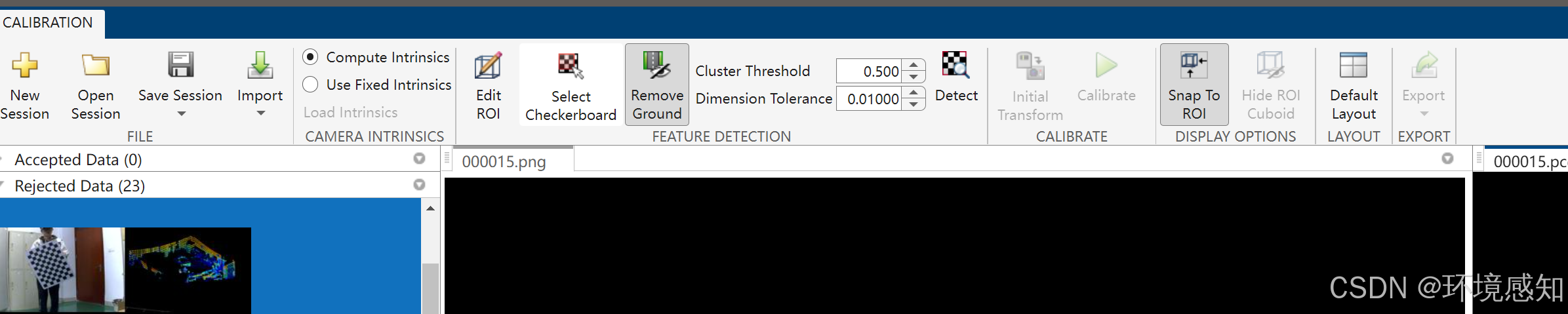
14.之后 点击手动选择标定板的区域保存,所有点云都需要这样操作:
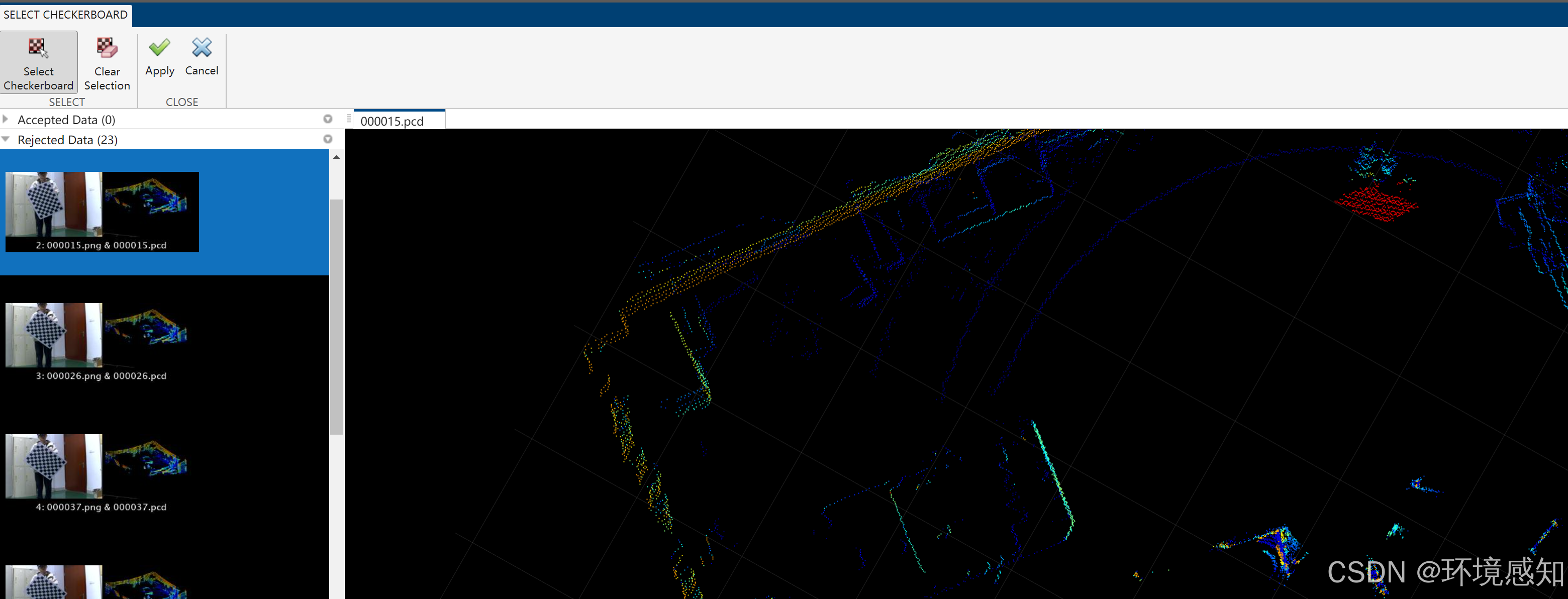
15. 我标注的比较随意,大家好好标,因为标注的不行的系统识别不到,会拒绝,比如:
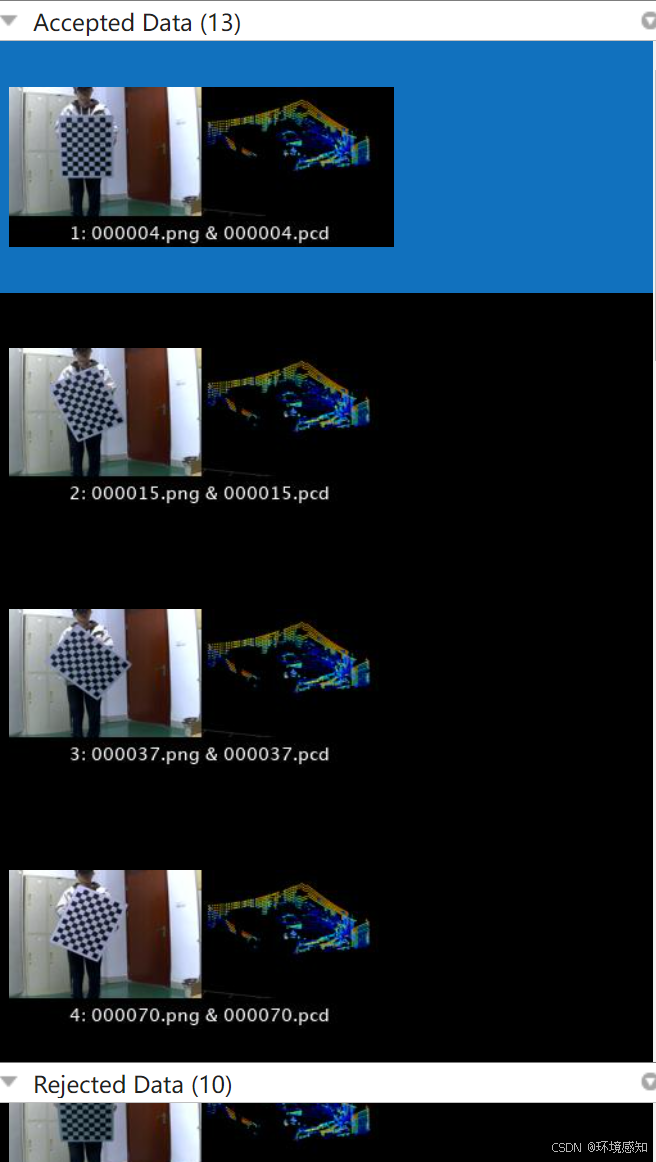
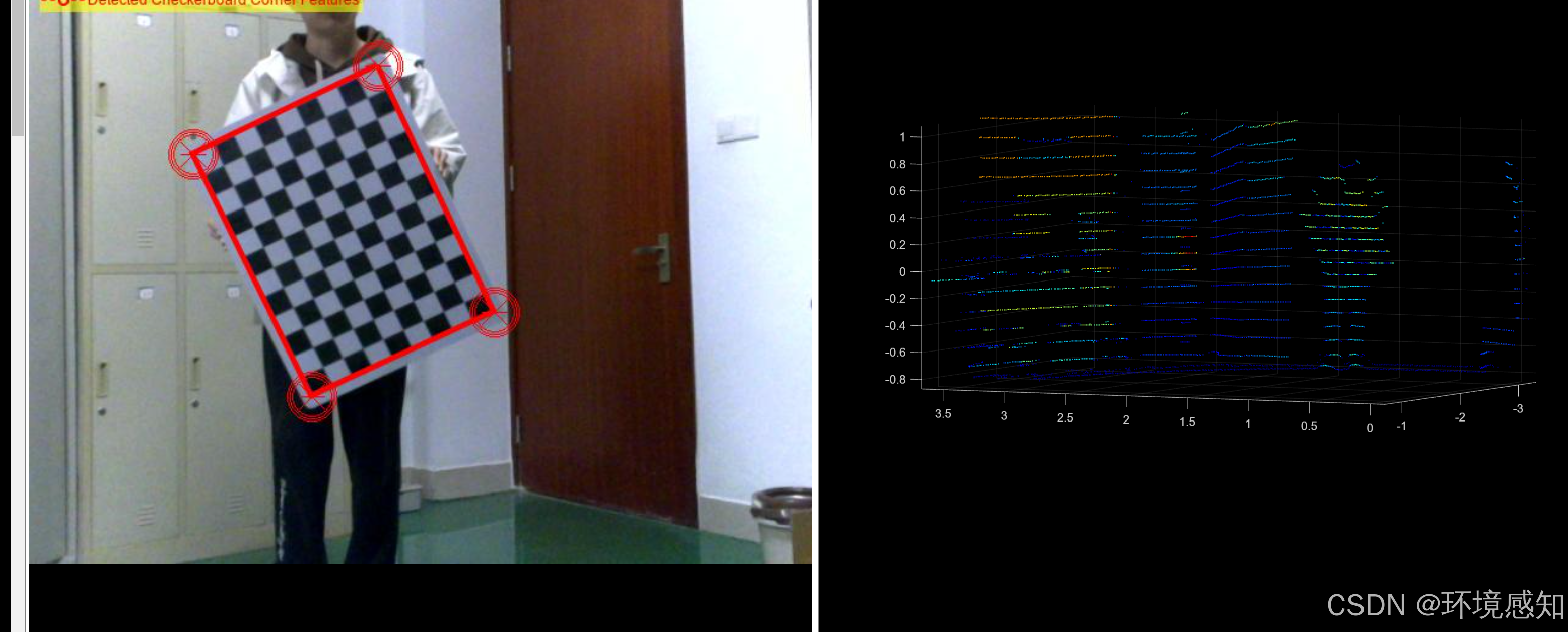
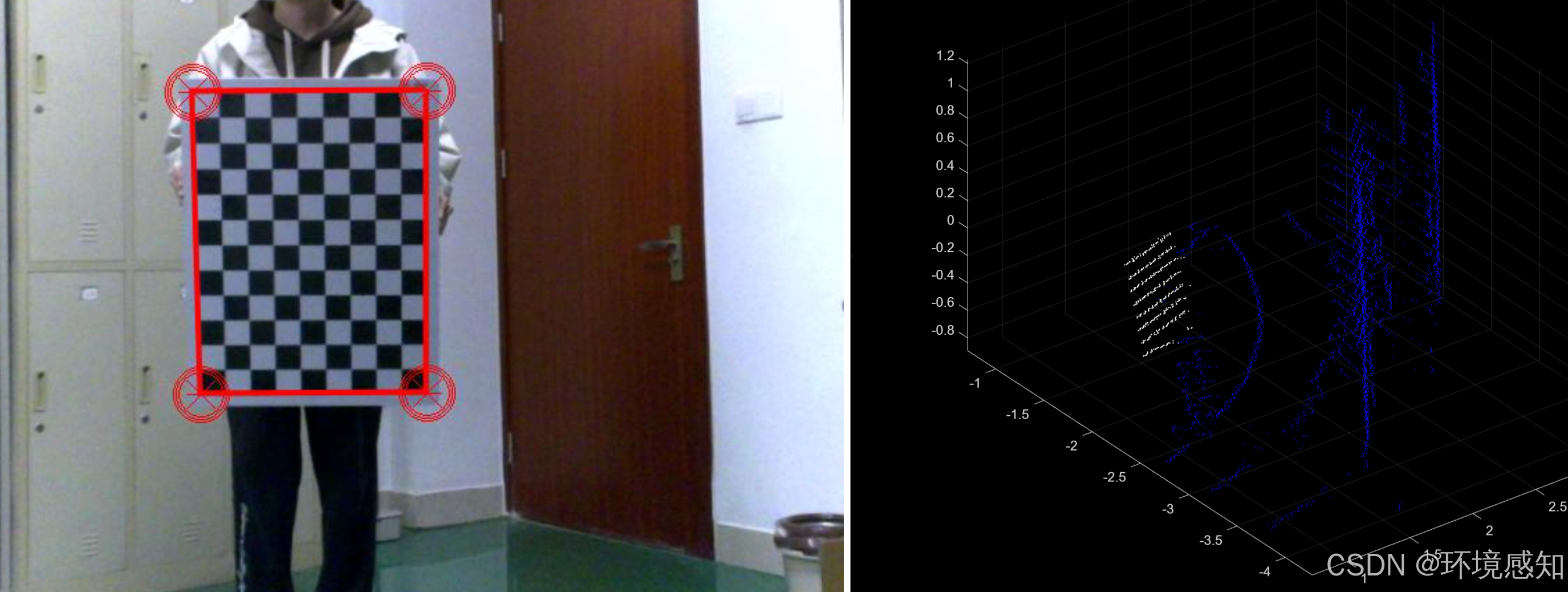
16.正确标注后,会在中间出现相应的图片和右侧的点云图:
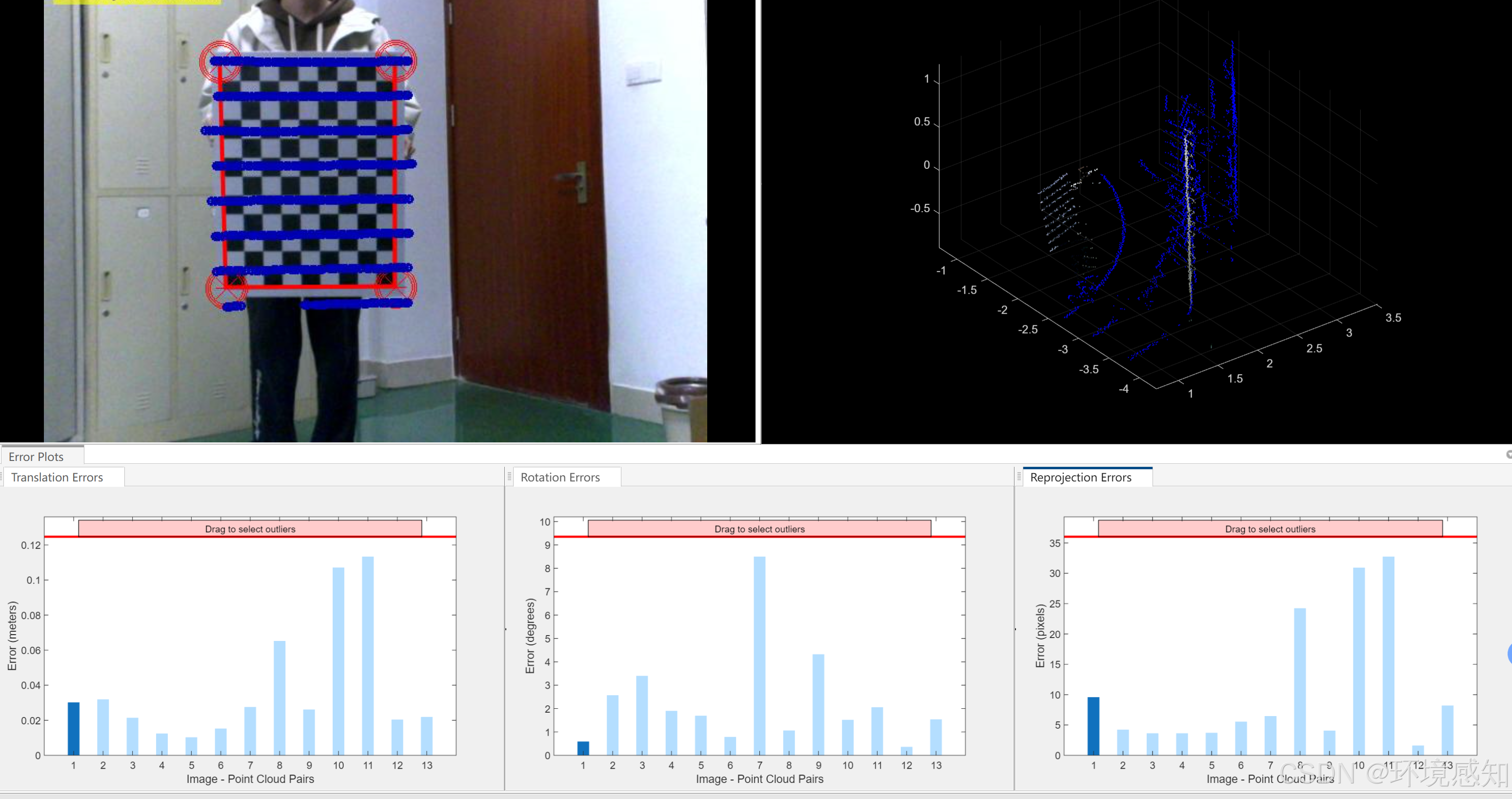
17. 之后点击上面的calibrate会进行标定,如下为几个相应的重投影结果,以及三个误差分布图:
18.标定的结果怎么看呢, 点击export导出到工作空间:

19,打开该变量,其包含的4个参数如下:
 20.参数含义为:
20.参数含义为:
-
Dimensionality 维度,表示该刚体变换是针对几维空间的,说明是一个三维空间中的变换。
-
T 变换矩阵(4x4 double),是刚体变换的齐次矩阵形式,包含旋转和平移信息。t3x1: 平移向量,表示物体在三维空间的平移,R3x3: 旋转矩阵,表示物体在三维空间的旋转。
-
Rotation 旋转矩阵(
3x3),表示刚体的旋转部分,是一个正交矩阵,满足旋转矩阵将一个三维点绕原点旋转到新的位置。 -
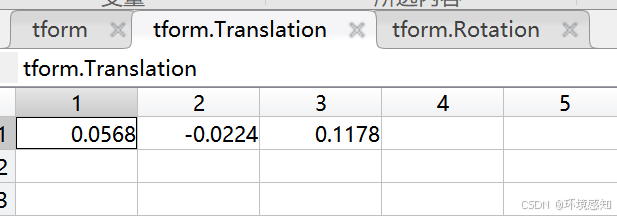
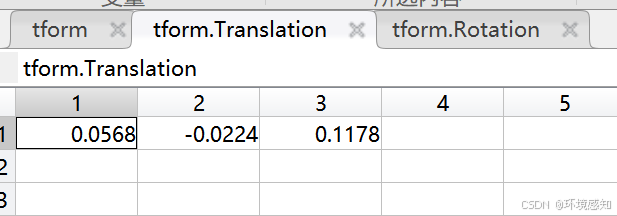
Translation 平移向量(
1x3),表示刚体在三维空间中的平移量。例如,这里的值为表示沿 x,y,z 轴的平移。
21.我们需要的也就是旋转矩阵和平移矩阵:
22.至此,终于标定完了,附上一张自己标定一晚上的结果,眼都花了。

相关文章:
基于MATLAB的激光雷达与相机联合标定原理及实现方法——以标定板为例
1.为什么要进行激光雷达和相机的联合标定? 激光雷达和相机的联合标定是为了将两种传感器的数据统一到同一坐标系中,从而实现更准确的环境感知。激光雷达提供精准的三维距离信息,而相机捕捉丰富的纹理和颜色,通过联合标定可以结合两…...

React(一)
文章目录 项目地址一、创建第一个react项目二、JSX语法2.1 生成列表2.2 大括号识别JS的表达式2.3 列表循环array2.4 条件判断以及假值显示2.5 复杂条件渲染2.6 事件处理2.7 添加CSS样式2.8 添加图片2.9 使用Fregments返回多个根标签2.10多条件渲染2.11 导出子组件2.12 给子组件…...

Liunx-Ubuntu22.04.1系统下配置Anaconda+pycharm+pytorch-gpu环境配置
这里写自定义目录标题 Liunx-Ubuntu22.04.1系统下配置Anacondapycharmpytorch-gpu环境配置一、Anaconda3配置1.Anaconda安装2.Anaconda更新3.Anaconda删除 二、pycharm配置1.pycharm安装 三、pytorch配置 Liunx-Ubuntu22.04.1系统下配置Anacondapycharmpytorch-gpu环境配置 一…...

Postman之数据提取
Postman之数据提取 1. 提取请求头\request中的数据2. 提取响应消息\response中的数据3. 通过正在表达式提取4. 提取cookies数据 本文主要讲解利用pm对象对数据进行提取操作,虽然postman工具的页面上也提供了一部分的例子,但是实际使用时不是很全面&#…...

selenium元素定位校验以及遇到的元素操作问题记录
页面元素定位方法及校验 使用比较多的是通过id、class和xpath来对元素进行定位。在定位前可以现在浏览器验证是否可以找到指定的元素。这样就不用每添加一个元素定位都运行代码来检查定位方式表达式是否正确。 使用XPATH定位 在浏览器F12,找到元素,在元…...

在AndroidStudio中新建项目时遇到的Gradle下载慢问题,配置错的按我的来,镜像地址不知道哪个网页找的,最主要下载要快
android-studio-2024.2.1.11-windows Android 移动应用开发者工具 – Android 开发者 | Android Developers https://r4---sn-j5o76n7z.gvt1-cn.com/edgedl/android/studio/install/2024.2.1.11/android-studio-2024.2.1.11-windows.exe?cms_redirectyes&met1731775…...

用mv命令替换rm命令
# 用mv命令替换rm命令 主要内容来源自以上博文 rm命令穷凶极恶,以下为替换命令的方式,必做 步骤 修改vim ~/.bashrc加入以下代码 mkdir -p ~/.trash #在家目录下创建一个.trash文件夹(隐藏文件,ls -a 查看) alias rmdel #使用别名…...

电解车间铜业机器人剥片技术是现代铜冶炼过程中自动化和智能化的重要体现
电解车间铜业机器人剥片技术是现代铜冶炼过程中自动化和智能化的重要体现 电解车间铜业机器人剥片技术是现代铜冶炼过程中自动化和智能化的重要体现,它主要应用于铜电解精炼的最后阶段,即从阴极板上剥离出纯铜的过程。以下是该技术的几个关键点ÿ…...
【qt】控件2
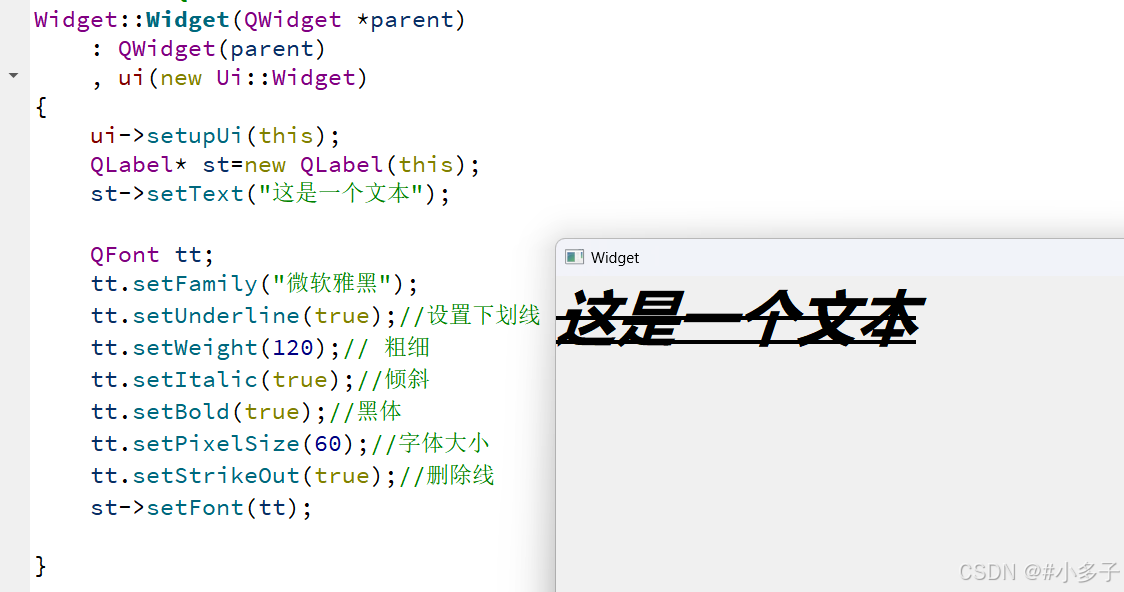
1.frameGeometry和Geometry区别 frameGeometry是开始从红圈开始算,Geometry从黑圈算 程序证明:使用一个按键,当按键按下,qdebug打印各自左上角的坐标(相当于屏幕左上角),以及窗口大小 Widget::Widget(QWid…...

Frida反调试对抗系列(四)百度加固
本文只是交流技术,如有侵权请联系我删除。 知识星球:https://t.zsxq.com/kNlj4 前言: 上一篇文章我们提到 我们使用github开源魔改好的frida server 但是仍然有一些厂商的server不能通过,那么这篇文章针对百度加固 进行快速通…...

Redis 安全
Redis 安全 Redis是一个开源的,高性能的键值存储系统,它通常被用作数据库,缓存和消息代理。由于其高性能和简单的API,Redis在全球范围内被广泛使用。然而,与其他数据库系统一样,Redis的安全性也是至关重要…...
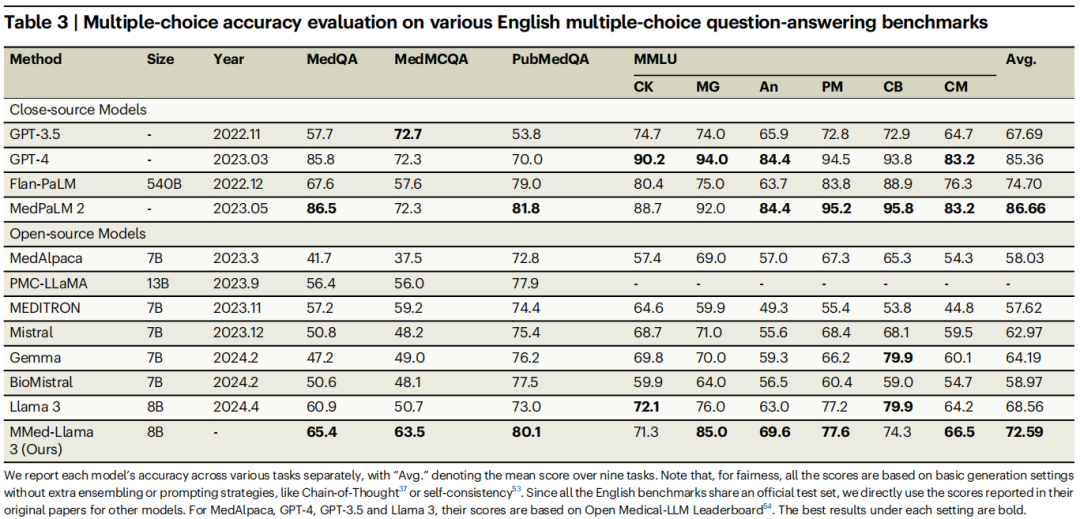
上交大与上海人工智能研究所联合推出医学多语言模型,模型数据代码开源
今天为大家介绍的是来自上海交通大学的王延峰与谢伟迪团队的一篇论文。开源的多语言医学语言模型的发展可以惠及来自不同地区、语言多样化的广泛受众。 来源丨 DrugAI、 机器人的脑电波 论文:https://www.nature.com/articles/s41467-024-52417-z MMedC࿱…...

网络安全:我们的安全防线
在数字化时代,网络安全已成为国家安全、经济发展和社会稳定的重要组成部分。网络安全不仅仅是技术问题,更是一个涉及政治、经济、文化、社会等多个层面的综合性问题。从宏观到微观,网络安全的重要性不言而喻。 宏观层面:国家安全与…...

理解 Python 中的 __getitem__ 方法:在自定义类中启用索引和切片操作
理解 Python 中的 __getitem__ 方法:在自定义类中启用索引和切片操作 在Python中,__getitem__是一个特殊方法,属于数据模型方法之一,它使得Python对象能够支持下标访问和切片操作。这个方法提供了一种机制,允许类的实…...

【数据结构】【线性表】【练习】反转链表
申明 该题源自力扣题库19,文章内容(代码,图表等)均原创,侵删! 题目 给你单链表的头指针head以及两个整数left和right,其中left<right,请你反转从位置left到right的链表节点&…...

vue2+3 —— Day5/6
自定义指令 自定义指令 需求:当页面加载时,让元素获取焦点(一进页面,输入框就获取焦点) 常规操作:操作dom “dom元素.focus()” 获取dom元素还要用ref 和 $refs <input ref"inp" type&quo…...

汽车资讯新视角:Spring Boot技术革新
2相关技术 2.1 MYSQL数据库 MySQL是一个真正的多用户、多线程SQL数据库服务器。 是基于SQL的客户/服务器模式的关系数据库管理系统,它的有点有有功能强大、使用简单、管理方便、安全可靠性高、运行速度快、多线程、跨平台性、完全网络化、稳定性等,非常…...

关于win11电脑连接wifi的同时,开启热点供其它设备连接
背景: 我想要捕获手机流量,需要让手机连接上电脑的热点。那么问题来了,我是笔记本电脑,只能连接wifi上网,此时我的笔记本电脑还能开启热点供手机连接吗?可以。 上述内容,涉及到3台设备&#x…...

【Apache Paimon】-- 2 -- 核心特性 (0.9.0)
目录 1、实时更新 1.1、实时大批量更新 1.2、支持定义合并引擎 1.3、支持定义更新日志生成器 2、海量数据追加处理 2.1、append table 2.2、快速查询 3、数据湖功能(类比:hudi、iceberg、delta) 3.1、支持 ACID 事务 3.2、支持 Time…...

golang对日期格式化
1.对日期格式化为 YYYY-mm-dd, 并且没有数据时,返回空 import ("encoding/json""time" )type DateTime time.Timetype SysRole struct {RoleId int64 gorm:"type:bigint(20);primary_key;auto_increment;角色ID;" json:&quo…...

AI Agent思维文件版本控制:mindkeeper工具的设计原理与实战指南
1. 项目概述:为AI的“大脑”打造时光机如果你正在使用像OpenClaw这样的AI助手框架,或者任何基于Markdown文件来定义AI行为、记忆和技能的项目,那么你一定经历过这样的时刻:为了优化AI的回复风格,你反复调整了SOUL.md里…...

Cursor编辑器Markdown规则集:AI生成文档自动化格式规范指南
1. 项目概述:一个为 Cursor 编辑器定制的 Markdown 规则集 如果你和我一样,日常重度依赖 Cursor 这款 AI 驱动的代码编辑器,并且经常需要编写大量的技术文档、项目 README 或者技术博客,那你一定遇到过这样的痛点:AI …...

Polkadot 正在补完 L1 里没人做过的“垂直 RISC-V 集成“
作者: PaperMoon团队 位 Parity 工程师周末买了一块 RISC-V 板子,把节点跑起来看看会断在哪里。配图是一张工程师的桌子,板子、线、调试器、电源。 很多人会觉得这就是一个 maker culture 风格的小实验。但如果你把过去三年 Polkadot 在 IS…...

嵌入式固件安全更新与密钥管理实践
1. 嵌入式固件安全更新概述在嵌入式系统开发中,固件更新是设备生命周期管理的关键环节。不同于传统PC软件的更新,嵌入式设备的固件更新面临更多挑战:受限的计算资源、不稳定的通信环境、严苛的安全要求等。我曾参与过多个工业控制设备的OTA升…...

4sapi 企业级实战:统一模型网关与全生命周期管理解决方案
引言随着大模型技术在企业中的广泛应用,越来越多的企业开始面临 "模型碎片化" 的挑战。不同部门、不同业务线各自对接不同的大模型厂商,使用不同的 API 接口,导致企业内部出现了多个独立的 AI 孤岛,带来了一系列严重的问…...

AI技能文件管理工具agent-skills-lint:多助手环境下的统一质检方案
1. 项目概述:为什么我们需要一个AI技能文件“质检员”如果你和我一样,同时在使用Claude Code、Cursor、Aider这些AI编程助手,那你一定遇到过这个烦人的问题:每个助手都有自己的“技能”(Skills)系统&#x…...

AI建站多语言怎么做?先懂业务,再谈翻译
AI建站多语言怎么做?先懂业务,再谈翻译当同行还在卷“建站速度”时,聪明的出海商家已经开始卷“AI可见度”了。据近期行业数据显示,超过60%的海外采购商开始习惯使用ChatGPT、Perplexity等AI工具寻找供应商,而非传统的…...

终极ROFL播放器指南:如何免费快速解锁英雄联盟回放文件分析
终极ROFL播放器指南:如何免费快速解锁英雄联盟回放文件分析 【免费下载链接】ROFL-Player (No longer supported) One stop shop utility for viewing League of Legends replays! 项目地址: https://gitcode.com/gh_mirrors/ro/ROFL-Player 还在为无法查看英…...

告别‘堆已损坏’:深入理解malloc/new在Win32与x64平台下的内存管理差异
告别‘堆已损坏’:深入理解malloc/new在Win32与x64平台下的内存管理差异 在C/C开发中,内存管理一直是开发者需要面对的核心挑战之一。当项目从32位迁移到64位环境,或者升级Visual Studio版本时,许多团队都会遇到一个令人头疼的问题…...

微通道液冷散热:六类强化结构深度解析
🎓作者简介:科技自媒体优质创作者 🌐个人主页:莱歌数字-CSDN博客 💌公众号:莱歌数字(B站同名) 📱个人微信:yanshanYH 211、985硕士,从业16年 从…...