《FreeRTOS任务删除篇》
任务删除函数
- 源码
- 1. 进入临界区
- 1.1 第一步
- 1.2 第二步
- 1.3 第三步
- 1.4 第四步
- 2. 获取待删除任务的任务控制块TCB
- 3. 从就绪/延迟列表中删除任务
- 4. 从事件列表中删除任务
- 5. 如果待删除任务是当前运行的任务
- 6. 如果待删除任务是其它任务
- 7. 退出临界区
- 7.1 第一步
- 7.2 第二步
- 7.3 第三步
- 7.4 第四步
- 8. 如果待删除的任务不是当前运行的任务
- 9. 如果待删除的任务不是当前运行的任务
- 介绍FreeRTOS任务删除函数的执行过程,逐行分析源代码。
- 要使用任务删除函数vTaskDelete,需要配置宏INCLUDE_vTaskDelete为1。
- 删除任务函数vTaskDelete的参数为待删除任务的任务句柄(即任务控制块)。
- 当函数参数为NULL时,代表删除的是调用函数的任务本身(即正在运行的任务)。
源码
/* 示例,在正在运行的任务中调用任务删除函数。*/
vTaskDelete(NULL);
/* 任务删除 */
#if ( INCLUDE_vTaskDelete == 1 ) /* 需要INCLUDE_vTaskDelete宏配置为1 */void vTaskDelete( TaskHandle_t xTaskToDelete ) /* 函数参数为待删除任务的任务句柄,可以用NULL代替当前任务句柄。 */{TCB_t * pxTCB;taskENTER_CRITICAL(); /* 进入临界区,本质是关闭全局中断。 */{/* If null is passed in here then it is the calling task that is* being deleted.* 如果在此处传递NULL,则删除的是调用函数的任务本身。*/pxTCB = prvGetTCBFromHandle( xTaskToDelete );/* Remove task from the ready/delayed list.* 从就绪/延迟列表中删除任务* 如果删除后列表中没有列表项,则uxListRemove返回0*//* 将任务控制块的成员状态列表项xStateListItem从列表中移除 */if( uxListRemove( &( pxTCB->xStateListItem ) ) == ( UBaseType_t ) 0 ){taskRESET_READY_PRIORITY( pxTCB->uxPriority );}else{mtCOVERAGE_TEST_MARKER();}/* Is the task waiting on an event also?* 任务是否也在等待事件?* 任务控制块的成员xEventListItem是否挂载在其他列表中*/if( listLIST_ITEM_CONTAINER( &( pxTCB->xEventListItem ) ) != NULL ){/* 将事件列表项从等待事件列表中移出 */( void ) uxListRemove( &( pxTCB->xEventListItem ) );}else{mtCOVERAGE_TEST_MARKER();}/* Increment the uxTaskNumber also so kernel aware debuggers can* detect that the task lists need re-generating. This is done before* portPRE_TASK_DELETE_HOOK() as in the Windows port that macro will* not return.* 同时自增uxTaskNumber,以便内核感知调试器可以检测到任务列表需要重新生成。* 这是在portPRE_TASK_DELETE_HOOK之前完成的,因为在Windows端口中,宏不会返回*/uxTaskNumber++; /* 任务列表需要重新生成 *//* 删除的是调用任务本身时 */if( pxTCB == pxCurrentTCB ){/* A task is deleting itself. This cannot complete within the* task itself, as a context switch to another task is required.* Place the task in the termination list. The idle task will* check the termination list and free up any memory allocated by* the scheduler for the TCB and stack of the deleted task.* 一个任务正在删除自己。* 这无法在任务本身内完成,因为需要切换到另一个任务的上下文。* 将任务放入等待结束列表中。* 空闲任务将检查等待结束列表,并释放调度器为准备删除任务分配的TCB和堆栈内存。*/vListInsertEnd( &xTasksWaitingTermination, &( pxTCB->xStateListItem ) );/* Increment the ucTasksDeleted variable so the idle task knows* there is a task that has been deleted and that it should therefore* check the xTasksWaitingTermination list.* 递增ucTasksDeleted变量,以便空闲任务知道有一个任务已被删除,* 因此它应该检查xTasksWaitingTermination列表。*/++uxDeletedTasksWaitingCleanUp;/* Call the delete hook before portPRE_TASK_DELETE_HOOK() as* portPRE_TASK_DELETE_HOOK() does not return in the Win32 port.* 在调用portPRE_TASK_delete_hook之前调用delete钩子,* 因为portPRE_TAS K_delete_ hook在Win32端口中不返回。*/traceTASK_DELETE( pxTCB );/* The pre-delete hook is primarily for the Windows simulator,* in which Windows specific clean up operations are performed,* after which it is not possible to yield away from this task -* hence xYieldPending is used to latch that a context switch is* required.* 预删除挂钩主要用于Windows模拟器,* 在该模拟器中执行特定于Windows的清理操作,之后不可能放弃此任务,* 因此xYieldPending用于锁定需要进行上下文切换。*/portPRE_TASK_DELETE_HOOK( pxTCB, &xYieldPending );}else{--uxCurrentNumberOfTasks; /* 当前任务个数自减一 */traceTASK_DELETE( pxTCB );/* Reset the next expected unblock time in case it referred to* the task that has just been deleted.* 重置下一个预期的解锁时间,以防它引用了刚刚被删除的任务*/prvResetNextTaskUnblockTime();}}taskEXIT_CRITICAL(); /* 退出临界区,本质是开启全局中断 *//* If the task is not deleting itself, call prvDeleteTCB from outside of* critical section. If a task deletes itself, prvDeleteTCB is called* from prvCheckTasksWaitingTermination which is called from Idle task.* 如果任务不是删除自己,请从临界区外部调用prvDeleteTCB。* 如果任务删除自己,则从空闲任务调用的prvCheckTasksWaitingTermination中调用prvDeleteTCB删除任务*/if( pxTCB != pxCurrentTCB ){prvDeleteTCB( pxTCB );}/* Force a reschedule if it is the currently running task that has just* been deleted.* 如果删除的是当前正在运行的任务,则强制重新开启一次任务调度*/if( xSchedulerRunning != pdFALSE ) /* 任务调度器正在运行中 */{if( pxTCB == pxCurrentTCB ) /* 删除的是当前正在运行的任务 */{configASSERT( uxSchedulerSuspended == 0 );portYIELD_WITHIN_API();}else{mtCOVERAGE_TEST_MARKER();}}}#endif /* INCLUDE_vTaskDelete */
1. 进入临界区
taskENTER_CRITICAL(); /* 进入临界区,本质是关闭全局中断。 */
1.1 第一步
#define taskENTER_CRITICAL() portENTER_CRITICAL() /* 从任务中进入临界区 */
1.2 第二步
#define portENTER_CRITICAL() vPortEnterCritical()
1.3 第三步
void vPortEnterCritical( void )
{portDISABLE_INTERRUPTS();ulCriticalNesting++;
}
1.4 第四步
#define portDISABLE_INTERRUPTS() __asm(" setc INTM") /* 关闭全局中断 */
2. 获取待删除任务的任务控制块TCB
portDONT_DISCARD PRIVILEGED_DATA TCB_t * volatile pxCurrentTCB = NULL; /* 指向当前运行的任务控制块。 */
/** Several functions take a TaskHandle_t parameter that can optionally be NULL,* where NULL is used to indicate that the handle of the currently executing* task should be used in place of the parameter. This macro simply checks to* see if the parameter is NULL and returns a pointer to the appropriate TCB.* 有几个函数接受一个TaskHandle_t参数,该参数可以选择设置为NULL,* 其中NULL用于表示使用当前正在执行的任务的句柄来代替该参数。* 此宏只是检查参数是否为NULL,并返回指向相应TCB的指针。*/
#define prvGetTCBFromHandle( pxHandle ) ( ( ( pxHandle ) == NULL ) ? pxCurrentTCB : ( pxHandle ) )
3. 从就绪/延迟列表中删除任务
/* Remove task from the ready/delayed list.* 从就绪/延迟列表中删除任务* 如果删除后列表中没有列表项,则返回0*/
if( uxListRemove( &( pxTCB->xStateListItem ) ) == ( UBaseType_t ) 0 )
{taskRESET_READY_PRIORITY( pxTCB->uxPriority );
}
else
{mtCOVERAGE_TEST_MARKER();
}
/* 从列表中移除待移除的列表项 */
UBaseType_t uxListRemove( ListItem_t * const pxItemToRemove )
{/* The list item knows which list it is in. Obtain the list from the list* item.* 从列表项的成员pxContainer可以知道它在哪个列表中。从列表项中获取列表。* */List_t * const pxList = pxItemToRemove->pxContainer;/* 将列表项从列表中移除 */pxItemToRemove->pxNext->pxPrevious = pxItemToRemove->pxPrevious;pxItemToRemove->pxPrevious->pxNext = pxItemToRemove->pxNext;/* Only used during decision coverage testing.* 仅在决策覆盖率测试期间使用。*/mtCOVERAGE_TEST_DELAY();/* Make sure the index is left pointing to a valid item.* 确保索引指向有效项*/if( pxList->pxIndex == pxItemToRemove ) /* 如果列表的列表索引号指向待移除的列表项 */{pxList->pxIndex = pxItemToRemove->pxPrevious; /* 将索引号指向待移除列表项的前一个列表项 */}else{mtCOVERAGE_TEST_MARKER();}pxItemToRemove->pxContainer = NULL; /* 将待删除列表项的成员pxContainer设置为NULL,表示其不属于任何列表 */( pxList->uxNumberOfItems )--; /* 列表的列表项个数减一 */return pxList->uxNumberOfItems; /* 返回列表中剩余的列表项个数 */
}
4. 从事件列表中删除任务
/* Is the task waiting on an event also?* 任务是否也在等待事件?* 任务控制块的成员xEventListItem是否挂载在其他列表中*/
if( listLIST_ITEM_CONTAINER( &( pxTCB->xEventListItem ) ) != NULL )
{/* 将事件列表项从等待事件列表中移出 */( void ) uxListRemove( &( pxTCB->xEventListItem ) );
}
else
{mtCOVERAGE_TEST_MARKER();
}
/** Return the list a list item is contained within (referenced from).* 返回列表项所挂载的列表** @param pxListItem The list item being queried. pxListItem表示正在查询的列表项。* @return A pointer to the List_t object that references the pxListItem. 指向挂载pxListItem的List_t对象的指针*/
#define listLIST_ITEM_CONTAINER( pxListItem ) ( ( pxListItem )->pxContainer )
5. 如果待删除任务是当前运行的任务
- 将列表项xStateListItem按尾部插入法挂载到xTasksWaitingTermination列表中
- 变量uxDeletedTasksWaitingCleanUp自增一,以供空闲任务使用。
/* 删除的是调用任务本身时 */
if( pxTCB == pxCurrentTCB )
{/* A task is deleting itself. This cannot complete within the* task itself, as a context switch to another task is required.* Place the task in the termination list. The idle task will* check the termination list and free up any memory allocated by* the scheduler for the TCB and stack of the deleted task.* 一个任务正在删除自己。* 这无法在当前任务执行内部完成,因为还需要切换到另一个任务的上下文。* 因此将待删除任务放入等待结束任务列表中。* 空闲任务将检查等待结束任务列表,并释放调度器为待删除任务分配的TCB和堆栈内存。*/vListInsertEnd( &xTasksWaitingTermination, &( pxTCB->xStateListItem ) );/* Increment the ucTasksDeleted variable so the idle task knows* there is a task that has been deleted and that it should therefore* check the xTasksWaitingTermination list.* 递增ucTasksDeleted变量,以便空闲任务知道有一个任务已被删除,* 因此它应该检查xTasksWaitingTermination列表。* */++uxDeletedTasksWaitingCleanUp;/* Call the delete hook before portPRE_TASK_DELETE_HOOK() as* portPRE_TASK_DELETE_HOOK() does not return in the Win32 port.* 在调用portPRE_TASK_delete_hook之前调用delete钩子,* 因为portPRE_TAS K_delete_ hook在Win32端口中不返回。* */traceTASK_DELETE( pxTCB );/* The pre-delete hook is primarily for the Windows simulator,* in which Windows specific clean up operations are performed,* after which it is not possible to yield away from this task -* hence xYieldPending is used to latch that a context switch is* required.* 预删除挂钩主要用于Windows模拟器,* 在该模拟器中执行特定于Windows的清理操作,之后不可能放弃此任务,* 因此xYieldPending用于锁定需要进行上下文切换。* */portPRE_TASK_DELETE_HOOK( pxTCB, &xYieldPending );
}
6. 如果待删除任务是其它任务
--uxCurrentNumberOfTasks; /* 当前任务个数自减一 */
traceTASK_DELETE( pxTCB );/* Reset the next expected unblock time in case it referred to* the task that has just been deleted.* 重置下一个预期的解锁时间,以防它引用了刚刚被删除的任务,即下一个解除等待准备运行的任务就是待删除任务。*/
prvResetNextTaskUnblockTime();
/* 重置下一个任务解锁时间 */
static void prvResetNextTaskUnblockTime( void )
{if( listLIST_IS_EMPTY( pxDelayedTaskList ) != pdFALSE ) /* 延迟任务列表是否为空 */{/* The new current delayed list is empty. Set xNextTaskUnblockTime to* the maximum possible value so it is extremely unlikely that the* if( xTickCount >= xNextTaskUnblockTime ) test will pass until* there is an item in the delayed list.* 当前新的延迟列表为空。将xNextTaskUnblockTime设置为最大可能值*/xNextTaskUnblockTime = portMAX_DELAY;}else{/* The new current delayed list is not empty, get the value of* the item at the head of the delayed list. This is the time at* which the task at the head of the delayed list should be removed* from the Blocked state.* 当前新的延迟列表不为空,请获取延迟列表头部项目的值。* 此时,应将延迟列表开头的任务从“阻塞”状态中删除。* 即准备让下一个被阻塞的任务开始执行*/xNextTaskUnblockTime = listGET_ITEM_VALUE_OF_HEAD_ENTRY( pxDelayedTaskList );}
}
/** Access macro to determine if a list contains any items. The macro will* only have the value true if the list is empty.* 访问宏以确定列表是否包含任何列表项。只有当列表为空时,宏才会具有值true。*/
#define listLIST_IS_EMPTY( pxList ) ( ( ( pxList )->uxNumberOfItems == ( UBaseType_t ) 0 ) ? pdTRUE : pdFALSE )
PRIVILEGED_DATA static List_t * volatile pxDelayedTaskList; /*< Points to the delayed task list currently being used. 指向当前正在使用的延迟任务列表*/
#define portMAX_DELAY ( TickType_t ) 0xffffffffUL
/** Access macro to retrieve the value of the list item at the head of a given list. * 访问宏以检索给定列表开头的列表项的值*/
#define listGET_ITEM_VALUE_OF_HEAD_ENTRY( pxList ) ( ( ( pxList )->xListEnd ).pxNext->xItemValue ) /* 末尾列表项的下一个列表项即为头部列表项。 */
PRIVILEGED_DATA static volatile TickType_t xNextTaskUnblockTime = ( TickType_t ) 0U; /* Initialised to portMAX_DELAY before the scheduler starts. 在调度程序启动之前,已初始化为portMAX_DELAY*/
7. 退出临界区
taskEXIT_CRITICAL(); /* 退出临界区,本质是开启全局中断 */
7.1 第一步
#define taskEXIT_CRITICAL() portEXIT_CRITICAL()
7.2 第二步
#define portEXIT_CRITICAL() vPortExitCritical()
7.3 第三步
void vPortExitCritical( void )
{ulCriticalNesting--;if( ulCriticalNesting == 0 ){portENABLE_INTERRUPTS();}
}
7.4 第四步
#define portENABLE_INTERRUPTS() __asm(" clrc INTM") /* 打开全局中断 */
8. 如果待删除的任务不是当前运行的任务
/* If the task is not deleting itself, call prvDeleteTCB from outside of* critical section. If a task deletes itself, prvDeleteTCB is called* from prvCheckTasksWaitingTermination which is called from Idle task.* 如果任务不是删除自己,请从临界区外部调用prvDeleteTCB。* 如果任务删除自己,则从空闲任务调用的prvCheckTasksWaitingTermination中调用prvDeleteTCB删除任务*/
if( pxTCB != pxCurrentTCB )
{prvDeleteTCB( pxTCB );
}
/* 删除任务控制块,根据分配内存的方式释放TCB和堆栈内存 */
#if ( INCLUDE_vTaskDelete == 1 )static void prvDeleteTCB( TCB_t * pxTCB ){/* This call is required specifically for the TriCore port. It must be* above the vPortFree() calls. The call is also used by ports/demos that* want to allocate and clean RAM statically.* 此调用是TriCore端口特有的。它必须位于vPortFree调用之上。* 该调用也被希望静态分配和清理RAM的端口/演示使用。* */portCLEAN_UP_TCB( pxTCB );#if ( ( configUSE_NEWLIB_REENTRANT == 1 ) || ( configUSE_C_RUNTIME_TLS_SUPPORT == 1 ) ){/* Free up the memory allocated for the task's TLS Block. */configDEINIT_TLS_BLOCK( pxCurrentTCB->xTLSBlock );}#endif#if ( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 0 ) && ( portUSING_MPU_WRAPPERS == 0 ) ){/* The task can only have been allocated dynamically - free both* the stack and TCB.* 该任务只能是被动态分配,需要释放堆栈和TCB* */vPortFreeStack( pxTCB->pxStack );vPortFree( pxTCB );}#elif ( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 ) /*lint !e731 !e9029 Macro has been consolidated for readability reasons. */{/* The task could have been allocated statically or dynamically, so* check what was statically allocated before trying to free the* memory.* 任务可以静态或动态分配,因此在尝试释放内存之前,请检查静态分配的内容* */if( pxTCB->ucStaticallyAllocated == tskDYNAMICALLY_ALLOCATED_STACK_AND_TCB ){/* Both the stack and TCB were allocated dynamically, so both* must be freed.* 堆栈和TCB都是动态分配的,因此必须释放它们。* */vPortFreeStack( pxTCB->pxStack );vPortFree( pxTCB );}else if( pxTCB->ucStaticallyAllocated == tskSTATICALLY_ALLOCATED_STACK_ONLY ){/* Only the stack was statically allocated, so the TCB is the* only memory that must be freed.* 只有堆栈是静态分配的,因此TCB是唯一必须释放的内存。* */vPortFree( pxTCB );}else{/* Neither the stack nor the TCB were allocated dynamically, so* nothing needs to be freed.* 堆栈和TCB都不是动态分配的,因此不需要释放任何内容* */configASSERT( pxTCB->ucStaticallyAllocated == tskSTATICALLY_ALLOCATED_STACK_AND_TCB );mtCOVERAGE_TEST_MARKER();}}#endif /* configSUPPORT_DYNAMIC_ALLOCATION */}#endif /* INCLUDE_vTaskDelete */
9. 如果待删除的任务不是当前运行的任务
/* Force a reschedule if it is the currently running task that has just* been deleted.* 如果删除的是当前正在运行的任务,则强制重新开启一次任务调度*/
if( xSchedulerRunning != pdFALSE ) /* 任务调度器正在运行中 */
{if( pxTCB == pxCurrentTCB ) /* 删除的是当前正在运行的任务 */{configASSERT( uxSchedulerSuspended == 0 );portYIELD_WITHIN_API();}else{mtCOVERAGE_TEST_MARKER();}
}
PRIVILEGED_DATA static volatile BaseType_t xSchedulerRunning = pdFALSE;
#ifndef portYIELD_WITHIN_API#define portYIELD_WITHIN_API portYIELD
#endif
#define portYIELD() do{bYield = 1; __asm(" INTR INT14");}while(0)
相关文章:

《FreeRTOS任务删除篇》
任务删除函数 源码1. 进入临界区1.1 第一步1.2 第二步1.3 第三步1.4 第四步 2. 获取待删除任务的任务控制块TCB3. 从就绪/延迟列表中删除任务4. 从事件列表中删除任务5. 如果待删除任务是当前运行的任务6. 如果待删除任务是其它任务7. 退出临界区7.1 第一步7.2 第二步7.3 第三步…...

递归算法专题一>Pow(x, n)
题目: 解析: 代码: public double myPow(double x, int n) {return n < 0 ? 1.0 / pow(x,-n) : pow(x,n); }private double pow(double x, int n){if(n 0) return 1.0;double tmp pow(x,n / 2);return n % 2 0 ? tmp * tmp : tmp …...

数据结构第一讲
数据结构定义 算法的定义 什么是好算法? 空间复杂度 时间复杂度 例子1 打印1到N之间的正整数 有递归和循环两种方法实现。 但是在数字变大后,递归的方法会导致内存占用过多而崩溃。 而循环则不会 例子2 写程序给定多项式在X处的值 从里往外算的算…...
)
SHELL笔记(循环)
在 Shell 编程中,循环结构是极为重要的一部分,它能够让我们轻松地重复执行特定的代码块,从而高效地处理各种重复性任务。本文将详细介绍 Shell 中常见的循环结构,包括 for 循环、while 循环和 until 循环,并通过具体的…...

SpringBoot多文件上传
多文件上传是在单文件上传的基础上修改而来,不了解单文件上传可以参考上一篇。以下在将修改部分展示如下: 一、修改upload.html文件: <!DOCTYPE html> <html> <head> <meta charset"UTF-8"> <title&g…...

MyBatis-数据库连接池、属性文件config.properties、类名简化、MyBatis的整体架构
一、数据库连接池 1、概述 存储实现创建好的连接对象的容器 2、优点 避免了频繁创建和销毁连接对象 3、使用 在使用到连接对象时可在数据库连接池中直接获取 4、实现 不需要我们去实现,框架和一些第三方有现成的组件(C3P0、ADCP、德鲁伊(阿里巴巴)ÿ…...

Flink-Source的使用
Data Sources 是什么呢?就字面意思其实就可以知道:数据来源。 Flink 做为一款流式计算框架,它可用来做批处理,也可以用来做流处理,这个 Data Sources 就是数据的来源地。 flink在批/流处理中常见的source主要有两大类…...

C0031.在Clion中使用mingw编译器来编译opencv的配置方法
mingw编译器编译opencv库的配置方法...
)
Android——连接MySQL(Java版)
Android——连接MySQL(Java版) 目录: Android——连接MySQL(Java版)一、JDBC1、什么是JDBC2、载入JDBC3、创建JDBC的工具类 二、使用数据库 一、JDBC 1、什么是JDBC JDBC全称Java Database Connectivity,译为Java语言连接数据库,是sun公司制…...

「四」体验HarmonyOS端云一体化开发模板——工程目录结构与云侧工程一键部署AGC云端
关于作者 白晓明 宁夏图尔科技有限公司董事长兼CEO、坚果派联合创始人 华为HDE、润和软件HiHope社区专家、鸿蒙KOL、仓颉KOL 华为开发者学堂/51CTO学堂/CSDN学堂认证讲师 开放原子开源基金会2023开源贡献之星 「目录」 「一」HarmonyOS端云一体化概要 「二」体验HarmonyOS端云一…...

Kotlin:后端开发的新宠
在当今的软件开发领域,编程语言的选择对于项目的成功至关重要。Kotlin,一种由 JetBrains 开发的编程语言,近年来在后端领域逐渐崭露头角,展现出了广阔的应用前景。 一、Kotlin 简介 Kotlin 是一种基于 JVM(Java Virt…...

SSM全家桶 1.Maven
或许总要彻彻底底地绝望一次 才能重新再活一次 —— 24.11.20 maven在如今的idea中已经实现自动配置,不需要我们手动下载 一、Maven的简介和快速入门 Maven 是一款为 Java 项目构建管理、依赖管理的工具(软件),使用 Maven 可以自动化构建测试、打包和发…...

SpringBoot 集成 html2Pdf
一、概述: 1. springboot如何生成pdf,接口可以预览可以下载 2. vue下载通过bold如何下载 3. 一些细节:页脚、页眉、水印、每一页得样式添加 二、直接上代码【主要是一个记录下次开发更快】 模板位置 1. 导入pom包 <dependency><g…...

利用 Watchtower 自动监听并更新正在运行的 Docker 容器
本文首发于只抄博客,欢迎点击原文链接了解更多内容。 前言 大部分 VPS 和 NAS 用户或多或少都有用 Docker 来部署一些 Self-hosting 的服务,其中大部分项目都是开源项目,更新频率非常高,特别是一些版本 0.x 的项目,及…...

Nodejs开发仿马蜂窝旅游小程序API接口,服务器端开发,商家后台 Vue3+微信小程序+koa+mongodb+node.js
文章目录 🚀 开启您的互联网创业新篇章一、🔥 课程亮点:二、🌐 适合人群:学习这个课程后,您将会收获到三、旅游后台管理系统1.后台登录界面2.后台首页 四、前台旅游小程序1.首页展示2.目的地界面3.搜索功能…...

极限失控的大模型使电力系统面临的跨域攻击风险及应对措施
目录: 0 引言 1 就大模型发生极限失控的风险进行讨论的必要性、紧迫性 1.1 预训练的数据来源 1.2 能力涌现与不可解释性 1.3 大模型与物质世界的连接 1.4 数量效应与失控 1.5 大模型发生极限失控的风险 1.5.1 人工智能反叛所需要素能力的拼图 1.5.2 火种源…...

mybatis-plus方法无效且字段映射失败错误排查
问题: Invalid bound statement (not found): com.htlc.assetswap.mapper.WalletMapper.insert,并且select * 进行查询时带下划线的字段未成功映射。 排查: 1.检查WalletMapper接口,确保继承自BaseMapper 2.启用驼峰命名法映射。a…...
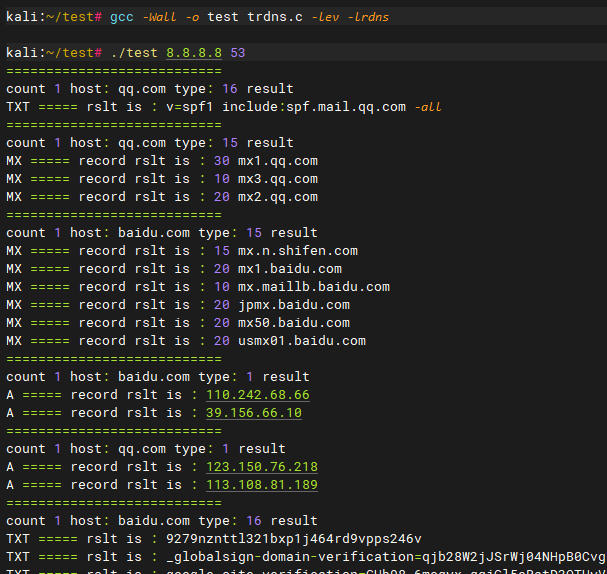
librdns一个开源DNS解析库
原文地址:librdns一个开源DNS解析库 – 无敌牛 欢迎参观我的个人博客:无敌牛 – 技术/著作/典籍/分享等 介绍 librdns是一个开源的异步多功能插件式的解析器,用于DNS解析。 源代码地址:GitHub - vstakhov/librdns: Asynchrono…...

Unity3D 逻辑服的Entity, ComponentData与System划分详解
前言 在Unity3D中,逻辑服(Entity, ComponentData和System)是一种非常高效的组件化设计模式,它可以帮助开发者更好地管理游戏中的实体和逻辑。本文将详细介绍Unity3D逻辑服的概念以及如何实现Entity、ComponentData和System的划分。 对惹,这…...

跟《经济学人》学英文:2024年11月23日这期 Why British MPs should vote for assisted dying
Why British MPs should vote for assisted dying A long-awaited liberal reform is in jeopardy in jeopardy:在危险中 jeopardy:美 [ˈdʒepərdi] 危险;危机;风险; 原文: THIS NEWSPAPER believes …...

如何删除论文脚注横线的方法——视图-草稿-引用——显示备注——删除脚注分隔符-即可。
如何删除论文脚注横线的方法——视图-草稿-引用——显示备注——删除脚注分隔符-即可。 Word中脚注线不会删?这里有妙招!,教育,职业教育,好看视频...

Lindy自动化效率翻倍的秘密:从零搭建高可靠多步骤任务流的7步黄金流程
更多请点击: https://intelliparadigm.com 第一章:Lindy自动化效率翻倍的秘密:从零搭建高可靠多步骤任务流的7步黄金流程 Lindy自动化平台以“越久越可靠”为设计哲学,将经典软件工程原则与现代可观测性实践深度融合。其核心优势…...

关于psthon问题
我想问问各位 我python可以查到 但是我的bit文件查不到python怎么回事...

打不开JupyterLab
因为安装某些依赖导致JupyterLab的依赖被动升级或降级,从而影响了JupyterLab的运行,此时可以SSH登录到实例,然后输入jupyter-lab命令进行确认,如果执行命令报错则说明是此问题,那么可以通过pip install jupyterlab再次…...

taotoken如何帮助ubuntu开发者应对大模型api的频繁更新与版本迭代
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助Ubuntu开发者应对大模型API的频繁更新与版本迭代 对于在Ubuntu环境下进行开发的工程师而言,大模型API…...

具身智能:面向新兴交叉学科建设的思考与建议 2026
这份由 CCF YOCSEF 长三角五地学术委员会 2026 年 5 月发布的白皮书,聚焦具身智能作为新兴交叉学科的建设,明确其并非 AI 与机器人学的简单拼接,而是围绕物理交互中的智能行为形成的新问题域,提出 “三大基本问题 一个应用需求”…...

脉冲神经网络加速器设计与边缘计算优化
1. 脉冲神经网络加速器的设计挑战与突破在边缘计算领域,脉冲神经网络(SNN)正以其独特的生物启发特性引发新一轮技术变革。与传统人工神经网络(ANN)相比,SNN通过离散的脉冲信号传递信息,模拟生物神经元的工作机制,理论上可实现超低…...

Godot 2D随机地图三大静默故障:黑屏、穿墙、寻路失败的根源与修复
1. 为什么刚上手Godot做2D随机地图就总卡在“生成出来是黑的”“角色穿墙”“房间连不通”这三件事上?如果你是刚从Unity或GameMaker转来Godot,或者第一次用GDScript写程序逻辑的新手,大概率已经在2D随机地图生成这个环节反复摔过跟头——不是…...

绝了!原来毕业论文还能这样写?2026降AIGC工具推荐合集
还在为查重率爆红、AI痕迹太明显、格式乱成一团而发愁?2026 年的 AI 论文工具早已不只是写文章那么简单,从选题构思到降AIGC率、去AI痕迹、查重优化,全流程智能辅助,帮你把论文写作变得简单高效,告别熬夜改稿的焦虑&am…...
)
【小白快速上手】 OpenClaw 安装部署全流程(含安装包)
OpenClaw 一键安装包|一键部署,告别复杂环境配置 适配系统:Windows10/11 64 位当前版本:v2.7.5(虾壳云版)核心优势:全程可视化操作,无需命令行、无需手动配置 Python/Node.js&#…...