STM32端口模拟编码器输入
文章目录
- 前言
- 一、正交编码器是什么?
- 二、使用步骤
- 2.1开启时钟
- 2.2配置编码器引脚 TIM3 CH1(PA6) CH2 (PA7)上拉输入
- 2.3.初始化编码器时基
- 2.4 初始化编码器输入
- 2.5 配置编码器接口
- 2.6 开启定时器
- 2.7获取编码器数据
- 三、参考程序
- 四、测试结果
- 4.1测试方法
- 4.2串口输出结果
- 总结
前言
提示:这里可以添加本文要记录的大概内容:
项目需要:
提示:以下是本篇文章正文内容,下面案例可供参考
一、正交编码器是什么?



在这里插入图片描述

二、使用步骤
2.1开启时钟
/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启TIM3的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
2.2配置编码器引脚 TIM3 CH1(PA6) CH2 (PA7)上拉输入
/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);
2.3.初始化编码器时基
代码如下(示例):
/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM3的时基单元
2.4 初始化编码器输入
代码如下(示例):
/*输入捕获初始化*/TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量TIM_ICStructInit(&TIM_ICInitStructure); //结构体初始化,若结构体没有完整赋值//则最好执行此函数,给结构体所有成员都赋一个默认值//避免结构体初值不确定的问题TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1TIM_ICInitStructure.TIM_ICFilter = 0; //输入滤波器参数,可以过滤信号抖动TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //选择配置定时器通道2TIM_ICInitStructure.TIM_ICFilter = 0; //输入滤波器参数,可以过滤信号抖动TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道
2.5 配置编码器接口
/*编码器接口配置*/TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//配置编码器模式以及两个输入通道是否反相//注意此时参数的Rising和Falling已经不代表上升沿和下降沿了,而是代表是否反相//此函数必须在输入捕获初始化之后进行,否则输入捕获的配置会覆盖此函数的部分配置
2.6 开启定时器
/*TIM使能*/TIM_Cmd(TIM3, ENABLE); //使能TIM3,定时器开始运行
2.7获取编码器数据
/*** 函 数:获取编码器的增量值* 参 数:无* 返 回 值:自上此调用此函数后,编码器的增量值*/
int16_t Encoder_Get(void)
{/*使用Temp变量作为中继,目的是返回CNT后将其清零*/int16_t Temp;Temp = TIM_GetCounter(TIM3);TIM_SetCounter(TIM3, 0);return Temp;
}
三、参考程序
#include "stm32f10x.h"
#include "stdio.h"
//全局GPIO_InitTypeDef GPIO_InitStruct;int x;/*** 函 数:编码器初始化* 参 数:无* 返 回 值:无*/
void Encoder_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启TIM3的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6和PA7引脚初始化为上拉输入/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM3的时基单元/*输入捕获初始化*/TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量TIM_ICStructInit(&TIM_ICInitStructure); //结构体初始化,若结构体没有完整赋值//则最好执行此函数,给结构体所有成员都赋一个默认值//避免结构体初值不确定的问题TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1TIM_ICInitStructure.TIM_ICFilter = 0; //输入滤波器参数,可以过滤信号抖动TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //选择配置定时器通道2TIM_ICInitStructure.TIM_ICFilter = 0; //输入滤波器参数,可以过滤信号抖动TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道/*编码器接口配置*/TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//配置编码器模式以及两个输入通道是否反相//注意此时参数的Rising和Falling已经不代表上升沿和下降沿了,而是代表是否反相//此函数必须在输入捕获初始化之后进行,否则输入捕获的配置会覆盖此函数的部分配置/*TIM使能*/TIM_Cmd(TIM3, ENABLE); //使能TIM3,定时器开始运行
}/*** 函 数:获取编码器的增量值* 参 数:无* 返 回 值:自上此调用此函数后,编码器的增量值*/
int16_t Encoder_Get(void)
{/*使用Temp变量作为中继,目的是返回CNT后将其清零*/int16_t Temp;Temp = TIM_GetCounter(TIM3);TIM_SetCounter(TIM3, 0);return Temp;
}void usart1_init()
{//PA9 TX PA10 RX USART1GPIO_InitTypeDef GPIO_InitStruct;USART_InitTypeDef USART_InitStruct;NVIC_InitTypeDef NVIC_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1, ENABLE);//1.开时钟GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;//发送GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10;//接收GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING;GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);USART_InitStruct.USART_BaudRate=115200;USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;USART_InitStruct.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;USART_InitStruct.USART_Parity=USART_Parity_No;USART_InitStruct.USART_StopBits=USART_StopBits_1;USART_InitStruct.USART_WordLength=USART_WordLength_8b;USART_Init(USART1, &USART_InitStruct);//2.初始化串口 USART_Cmd(USART1, ENABLE);//3.是能串口USART_SendData(USART1, '4');while(USART_GetFlagStatus(USART1, USART_FLAG_TXE)!=1);USART_SendData(USART1, '1');while(USART_GetFlagStatus(USART1, USART_FLAG_TXE)!=1);USART_SendData(USART1, 0X41);while(USART_GetFlagStatus(USART1, USART_FLAG_TXE)!=1);USART_SendData(USART1, 41);while(USART_GetFlagStatus(USART1, USART_FLAG_TXE)!=1);USART_ITConfig(USART1,USART_IT_RXNE,ENABLE );// 4.接受完成中断NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 5.配置中断分组NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn;NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=0;NVIC_InitStruct.NVIC_IRQChannelSubPriority=0; NVIC_Init(&NVIC_InitStruct);//配置中断优先级}int fputc(int ch,FILE *f)
{USART_SendData(USART1, (u8)ch);while(!USART_GetFlagStatus(USART1, USART_FLAG_TXE));return ch;
}void delay(u16 ms)
{u16 i,j;for(i=0;i<ms;i++)for(j=0;j<1000;j++);
}int main()
{//局部 // 库函数开启GPIO时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitStruct.GPIO_Pin= GPIO_Pin_0|GPIO_Pin_1;GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOA, &GPIO_InitStruct); //&xGPIO_InitStruct.GPIO_Pin= GPIO_Pin_2|GPIO_Pin_3;GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOB, &GPIO_InitStruct); //&x usart1_init();Encoder_Init();u16 Speed=0;GPIO_ResetBits(GPIOA, GPIO_Pin_0);GPIO_ResetBits(GPIOA, GPIO_Pin_1);while(1){GPIO_SetBits(GPIOA, GPIO_Pin_0);//GPIO_ResetBits(GPIOA, GPIO_Pin_0);u8 k=0;for(k=0;k<20;k++){GPIO_ResetBits(GPIOA, GPIO_Pin_0);GPIO_ResetBits(GPIOA, GPIO_Pin_0);delay(100);GPIO_ResetBits(GPIOA, GPIO_Pin_1);GPIO_ResetBits(GPIOA, GPIO_Pin_1);delay(100);GPIO_SetBits(GPIOA,GPIO_Pin_0); GPIO_SetBits(GPIOA,GPIO_Pin_0);delay(100);GPIO_SetBits(GPIOA,GPIO_Pin_1); GPIO_SetBits(GPIOA,GPIO_Pin_1); delay(100);}Speed = Encoder_Get(); //每隔固定时间段读取一次编码器计数增量值,即为速度值printf("测到的脉冲是=%d \r\n",Speed);}
}四、测试结果
4.1测试方法
将正交编码编码的信号输入STM32 PA6 PA7引脚
因为没有编码器所以用PA0 和PA1模拟输出正交编码的PWM波形
如果有编码器器可以直接接入 PA6 PA7
4.2串口输出结果
结果分析:
这里对输入的波形滤波
PA0 PA1 高低电平输出
循环20次
一次PA0循环输出1次上升沿,1次下降沿
一次PA1循环输出1次上升沿,1次下降沿
20*(1+1+1+1)=80
所以计数器的次数是0
接线


总结
学习使人快乐!
音乐使人愉悦!
日积月累使人充实和自信!
相关文章:
STM32端口模拟编码器输入
文章目录 前言一、正交编码器是什么?二、使用步骤2.1开启时钟2.2配置编码器引脚 TIM3 CH1(PA6) CH2 (PA7)上拉输入2.3.初始化编码器时基2.4 初始化编码器输入2.5 配置编码器接口2.6 开启定时器2.7获取编码器数据 三、参考程序四、测试结果4.1测试方法4.2串口输出结果…...

Centos 8, add repo
Centos repo前言 Centos 8更换在线阿里云创建一键更换repo 自动化脚本 华为Centos 源 , 阿里云Centos 源 华为epel 源 , 阿里云epel 源vim /centos8_repo.sh #!/bin/bash # -*- coding: utf-8 -*- # Author: make.han...
)
MYSQL- 查看存储过程调式信息语句(二十七)
13.7.5.27 SHOW PROCEDURE CODE 语句 SHOW PROCEDURE CODE proc_name此语句是MySQL扩展,仅适用于已构建有调试支持的服务器。它显示了命名存储过程的内部实现的表示。类似的语句SHOW FUNCTION CODE显示有关存储函数的信息(见第13.7.5.19节“SHOW FUNTIO…...

C#基础上机练习题
21.计算500-800区间内素数的个数cn,并按所求素数的值从大到小的顺序排列,再计算其间隔加、减之和,即第1个素数-第2个素数第3个素数-第4个素数第5个素数……的值sum。请编写函数实现程序的要求,把结果cn和sum输出。 22.在三位整数…...

5.5 W5500 TCP服务端与客户端
文章目录 1、TCP介绍2、W5500简介2.1 关键函数socketlistensendgetSn_RX_RSRrecv自动心跳包检测getSn_SR 1、TCP介绍 TCP 服务端: 创建套接字[socket]:服务器首先创建一个套接字,这是网络通信的端点。绑定套接字[bind]:服务器将…...
一区北方苍鹰算法优化+创新改进Transformer!NGO-Transformer-LSTM多变量回归预测
一区北方苍鹰算法优化创新改进Transformer!NGO-Transformer-LSTM多变量回归预测 目录 一区北方苍鹰算法优化创新改进Transformer!NGO-Transformer-LSTM多变量回归预测效果一览基本介绍程序设计参考资料 效果一览 基本介绍 1.Matlab NGO-Transformer-LST…...

深入理解 MyBatis 的缓存机制:一级缓存与二级缓存
MyBatis 是目前 Java 开发中常用的一种 ORM(对象关系映射)框架,它不仅简化了 SQL 语句的编写和管理,还提供了强大的缓存机制,用以提高数据库访问的性能。MyBatis 的缓存分为一级缓存和二级缓存,分别应用于不…...

移远通信推出全新5G RedCap模组RG255AA系列,以更高性价比加速5G轻量化大规模商用
11月20,全球领先的物联网整体解决方案供应商移远通信宣布,正式推出其全新5G RedCap模组RG255AA系列。该系列模组支持5G NR独立组网(SA)和LTE Cat 4双模通信,具有高性能高集成度、低功耗、小尺寸、高性价比等优势&#…...

架构-微服务-环境搭建
文章目录 前言一、案例准备1. 技术选型2. 模块设计3. 微服务调用 二、创建父工程三、创建基础模块四、创建用户微服务五、创建商品微服务六、创建订单微服务 前言 微服务环境搭建 使用的电商项目中的商品、订单、用户为案例进行讲解。 一、案例准备 1. 技术选型 maven&a…...

conda下载与pip下载的区别
一、conda下载与pip下载的区别 最重要是依赖关系: pip安装包时,尽管也对当前包的依赖做检查,但是并不保证当前环境的所有包的所有依赖关系都同时满足。 当某个环境所安装的包越来越多,产生冲突的可能性就越来越大。conda会检查当…...

MySQL获取数据库内所有表格数据总数
在 MySQL 中,要获取数据库内所有表格的数据总数,可以编写一个查询脚本来遍历每个表并计算其行数。你可以使用 INFORMATION_SCHEMA 数据库,它包含了关于数据库元数据的表格,如 TABLES 和 COLUMNS。 以下是一个示例脚本,…...
Matlab 深度学习工具箱 案例学习与测试————求二阶微分方程
clc clear% 定义输入变量 x linspace(0,2,10000);% 定义网络的层参数 inputSize 1; layers [featureInputLayer(inputSize,Normalization"none")fullyConnectedLayer(10)sigmoidLayerfullyConnectedLayer(1)sigmoidLayer]; % 创建网络 net dlnetwork(layers);% 训…...

django authentication 登录注册
文章目录 前言一、django配置二、后端实现1.新建app2.编写view3.配置路由 三、前端编写1、index.html2、register.html3、 login.html 总结 前言 之前,写了django制作简易登录系统,这次利用django内置的authentication功能实现注册、登录 提示ÿ…...
三种蓝牙架构实现方案
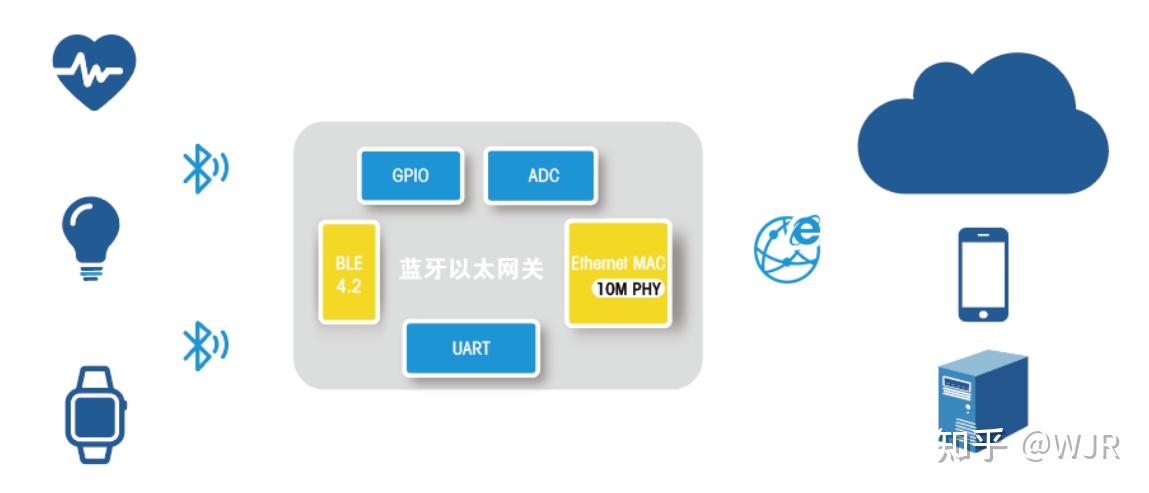
一、蓝牙架构方案 1、hostcontroller双芯片标准架构 手机里面包含很多SoC或者模块,每颗SoC或者模块都有自己独有的功能,比如手机应用跑在AP芯片上,显示屏,3G/4G通信,WiFi/蓝牙等都有自己专门的SoC或者模块࿰…...

ffmpeg 视频滤镜:高斯模糊-gblur
滤镜描述 gblur 官网地址 > FFmpeg Filters Documentation 这个滤镜会将视频变得模糊。 滤镜使用 参数 gblur AVOptions:sigma <float> ..FV.....T. set sigma (from 0 to 1024) (default 0.5)steps <int> ..FV.....T…...

期权懂|在期权市场中,如何用好双买期权?
期权小懂每日分享期权知识,帮助期权新手及时有效地掌握即市趋势与新资讯! 在期权市场中,如何用好双买期权? 期权双买操作,即同时买入认购期权(看涨期权)和认沽期权(看跌期权…...

【Linux学习】【Ubuntu入门】2-3 make工具和makefile引入
1.使用命令新建三个.c文件vi main.c,vi input.c,vi caclcu.c,两个.h文件vi input.h,vi caclcu.h 2.vi Makefile:新建Makefile文件,输入一下内容 注意:命令列表中每条命令前用TAB键,不…...

《黑神话:悟空》游戏辅助修改器工具下载指南与操作方法详解
《黑神话:悟空》是一款备受期待的动作冒险游戏,目前尚未正式发布。游戏开发团队一直在强调游戏的完整性和公平性,因此官方并不支持任何形式的作弊或修改行为。然而,对于一些玩家而言,使用辅助修改器可能会成为他们体验…...

C语言菜鸟入门·关键字·union的用法
目录 1. 简介 2. 访问成员 2.1 声明 2.2 赋值 3. 共用体的大小 4. 与typedef联合使用 5. 更多关键字 1. 简介 共用体(union)是一种数据结构,它允许在同一内存位置存储不同的数据类型,但每次只能存储其中一种类型的…...

ensp静态路由实验
一、实验目的 1、熟练掌握交换机的基本配置命令 2、熟练掌握静态路由的使用方法 3. 熟练掌握交换机端口模式 二、实验内容 需求: 根据要求利用现有实验设备组建小型局域网 实验设备: 交换机S37002台;PC机2台;路由器2台。 …...

跨平台文件自由:Free-NTFS-for-Mac 终极解决方案深度解析
跨平台文件自由:Free-NTFS-for-Mac 终极解决方案深度解析 【免费下载链接】Free-NTFS-for-Mac Nigate: An open-source NTFS utility for Mac. It supports all Mac models (Intel and Apple Silicon), providing full read-write access, mounting, and management…...

PHPStudy本地开发,用上Redis 5的Stream和HyperLogLog到底有多香?
PHPStudy本地开发中Redis 5的Stream与HyperLogLog实战指南 Redis作为高性能的内存数据库,在PHP开发中扮演着重要角色。当我们在本地开发环境使用PHPStudy时,默认安装的Redis 3.0.504版本功能有限,无法体验Redis 5引入的强大新特性。本文将深…...

Intel Wi-Fi 6 AX201网卡‘代码10’通病?华硕/戴尔/联想多品牌用户自救指南
Intel Wi-Fi 6 AX201网卡‘代码10’故障全解析与跨品牌解决方案 当你的笔记本突然无法连接Wi-Fi,设备管理器中那个带着黄色感叹号的Intel Wi-Fi 6 AX201网卡图标格外刺眼,显示着"该设备无法启动(代码10)"的提示——这不…...

利用MCP协议与Crypto APIs为AI助手集成多链交易数据查询能力
1. 项目概述:一个为AI助手注入区块链洞察力的MCP服务器 如果你和我一样,日常开发中经常需要查询不同区块链上的交易详情——比如验证一笔以太坊上的USDT转账是否成功,或者追溯某个比特币地址的资金来源——那你肯定体会过在十几个浏览器标签…...

Linux下Cursor AI编辑器自动化安装脚本设计与实现
1. 项目概述:为什么我们需要一个Cursor的Linux安装脚本如果你是一个在Linux环境下工作的开发者,并且对AI辅助编程工具感兴趣,那么Cursor这个名字你一定不陌生。作为一款集成了强大AI能力的代码编辑器,它正迅速成为许多程序员的新宠…...

如何设计完美的 TypeScript 错误消息模拟测试数据:深入理解 pretty-ts-errors 测试策略 [特殊字符]
如何设计完美的 TypeScript 错误消息模拟测试数据:深入理解 pretty-ts-errors 测试策略 🔍 【免费下载链接】pretty-ts-errors 🔵 Make TypeScript errors prettier and human-readable in VSCode 🎀 项目地址: https://gitcode…...

终极开源语音AI工具包:Sherpa-Onnx一站式解决方案
终极开源语音AI工具包:Sherpa-Onnx一站式解决方案 【免费下载链接】sherpa-onnx Speech-to-text, text-to-speech, speaker diarization, speech enhancement, source separation, and VAD using next-gen Kaldi with onnxruntime without Internet connection. Sup…...

基于Kubernetes Operator的企业级区块链网络自动化部署实践
1. 项目概述:企业级区块链的云原生部署方案如果你正在寻找一个能够将企业级区块链网络快速、稳定地部署到Kubernetes集群上的成熟方案,那么ConsenSys开源的quorum-kubernetes项目绝对值得你花时间深入研究。这个项目不是一个简单的概念验证,而…...

Python金融数据分析实战:从数据清洗到LLM智能问答机器人构建
1. 项目概述:一个金融数据分析与智能问答的实战项目 最近在整理一些数据分析的实战项目,正好翻到了之前为Forage BCGX GenAI项目做的一个金融分析案例。这个项目麻雀虽小,五脏俱全,它完整地走了一遍从原始数据清洗、指标计算、可视…...
)
Google Calendar智能安排深度拆解(Gemini原生集成技术白皮书级解析)
更多请点击: https://intelliparadigm.com 第一章:Gemini Google Calendar智能安排技术全景概览 Gemini 与 Google Calendar 的深度集成标志着日程管理进入语义理解驱动的新阶段。该能力并非简单调用 API,而是依托 Gemini 模型对自然语言指…...