Ubuntu20.04安装kalibr
文章目录
- 环境配置
- 安装wxPython
- 下载编译
- 测试
- 报错1
- 问题描述
- 问题分析
- 问题解决
- 参考
环境配置
Ubuntu20.04,python3.8.10,boost自带的1.71
sudo apt update
sudo apt-get install python3-setuptools python3-rosinstall ipython3 libeigen3-dev libboost-all-dev doxygen libopencv-dev ros-noetic-vision-opencv ros-noetic-image-transport-plugins ros-noetic-cmake-modules python3-software-properties software-properties-common libpoco-dev python3-matplotlib python3-scipy python3-git python3-pip libtbb-dev libblas-dev liblapack-dev libv4l-dev python3-catkin-tools python3-igraph libsuitesparse-dev
安装wxPython
先下载 wxPython-4.2.1-cp38-cp38-linux_x86_64.whl
pip3 install wxPython-4.2.1-cp38-cp38-linux_x86_64.whl
下载编译
mkdir ~/kalibr_ws/src
cd ~/kalibr_ws/src
git clone --recursive https://github.com/ori-drs/kalibrcd ~/kalibr_ws
source /opt/ros/noetic/setup.bash
catkin init
catkin config --extend /opt/ros/noetic
catkin config --merge-devel # Necessary for catkin_tools >= 0.4.
catkin config --cmake-args -DCMAKE_BUILD_TYPE=Releasecatkin build -DCMAKE_BUILD_TYPE=Release -j16 # 比较耗时,5-6分钟吧,可以喝杯茶。
测试
damon@damon-virtual-machine:/opt/kalibr_ws$ source devel/setup.bash
damon@damon-virtual-machine:/opt/kalibr_ws$ devel/lib/kalibr/kalibr_calibrate_cameras --help
importing libraries
Calibrate the intrinsics and extrinsics of a camera system with non-shared overlapping field of view.usage: Example usage to calibrate a camera system with two cameras using an aprilgrid. cam0: omnidirection model with radial-tangential distortioncam1: pinhole model with equidistant distortionkalibr_calibrate_cameras --models omni-radtan pinhole-equi --target aprilgrid.yaml \--bag MYROSBAG.bag --topics /cam0/image_raw /cam1/image_raw。。。。。。
报错1
问题描述
在使用 Kalibr 的 kalibr_calibrate_cameras 脚本时,执行命令时遇到以下错误:
damon@damon-virtual-machine:~/kalibr_ws$ devel/lib/kalibr/kalibr_calibrate_cameras --help
importing libraries
Traceback (most recent call last):File "devel/lib/kalibr/kalibr_calibrate_cameras", line 15, in <module>exec(compile(fh.read(), python_script, 'exec'), context)File "/home/damon/kalibr_ws/src/kalibr/aslam_offline_calibration/kalibr/python/kalibr_calibrate_cameras", line 6, in <module>import smFile "/home/damon/kalibr_ws/devel/lib/python3/dist-packages/sm/__init__.py", line 34, in <module>exec(__fh.read())File "<string>", line 4, in <module>
ImportError: /home/damon/kalibr_ws/devel/lib/python3/dist-packages/sm/libsm_python.so: undefined symbol: _ZN5boost6python15instance_holder8allocateEP7_objectmmm
damon@damon-virtual-machine:~/kalibr_ws$
问题分析
这个错误表明,libsm_python.so 文件中依赖的符号 _ZN5boost6python15instance_holder8allocateEP7_objectmmm 无法解析。该符号属于 Boost.Python 库,通常用于处理 Python 和 C++ 之间的交互。
问题解决
1.验证 Boost 版本
检查 /usr/include/boost/version.hpp,确保显示的版本是系统默认版本(1.71):
damon@damon-virtual-machine:~/kalibr_ws$ cat /usr/include/boost/version.hpp | grep BOOST_LIB_VERSION
// BOOST_LIB_VERSION must be defined to be the same as BOOST_VERSION
#define BOOST_LIB_VERSION "1_71"
damon@damon-virtual-machine:~/kalibr_ws$
- 检查是否安装
boost-python
damon@damon-virtual-machine:~/kalibr_ws$ dpkg -l | grep libboost-python
ii libboost-python-dev 1.71.0.0ubuntu2 amd64 Boost.Python Library development files (default version)
ii libboost-python1.71-dev 1.71.0-6ubuntu6 amd64 Boost.Python Library development files
ii libboost-python1.71.0 1.71.0-6ubuntu6 amd64 Boost.Python Library
damon@damon-virtual-machine:~/kalibr_ws$
从输出可以看出,系统中已经正确安装了 boost-python 和与 Boost 1.71 匹配的相关开发包:
- libboost-python-dev:默认的开发文件(与系统的 Boost 版本保持一致)。
- libboost-python1.71-dev:Boost 1.71 版本的开发文件。
- libboost-python1.71.0:Boost 1.71 版本的运行时库。
这些包都已经安装完毕,说明 boost-python 的安装环境是正常的。
- 检查 boost-python 的库文件是否存在
运行以下命令查看 boost-python 的动态库:
ls /usr/lib | grep boost_python
输出中应包含类似以下内容:
libboost_python1.71.so
libboost_python-py38.so
但运行ls /usr/lib | grep boost_python,没有输出

从输出可以看出,boost-python 的动态库文件似乎未正确安装或未找到。尽管 dpkg 显示相关开发包已经安装,但动态库文件 (libboost_python*.so) 并未出现在 /usr/lib 目录中。
- 确认动态库文件的实际位置
有时动态库可能安装到了其他路径(例如 /usr/lib/x86_64-linux-gnu)。运行以下命令搜索 libboost_python 文件:
damon@damon-virtual-machine:~/kalibr_ws$ sudo find /usr -name "libboost_python*.so"
[sudo] damon 的密码:
/usr/lib/x86_64-linux-gnu/libboost_python1.71.so
/usr/lib/x86_64-linux-gnu/libboost_python38.so
damon@damon-virtual-machine:~/kalibr_ws$
从输出可以看出,boost-python 的动态库文件已正确安装并位于路径 /usr/lib/x86_64-linux-gnu/ 中。具体包括以下文件:
- /usr/lib/x86_64-linux-gnu/libboost_python1.71.so:Boost Python 1.71 的主动态库。
- /usr/lib/x86_64-linux-gnu/libboost_python38.so:适配 Python 3.8 的 Boost Python 动态库。
这些文件是正确的,说明 boost-python 已安装成功。
。。。。比较多,不整理了
- 创建测试代码文件
在当前目录创建 my_program.cpp
#include <boost/python.hpp>
#include <iostream>// 定义普通函数
std::string greet() {return "Hello, Python!";
}// 模块初始化
BOOST_PYTHON_MODULE(example) {using namespace boost::python;def("greet", greet); // 绑定函数
}int main() {std::cout << "Boost Python test program compiled successfully!" << std::endl;return 0;
}
编译命令
g++ -shared -fPIC -I/usr/include/python3.8 -o example.so my_program.cpp /usr/lib/x86_64-linux-gnu/libboost_python1.71.so
加载并测试模块:
python3.8 -c "import example; print(example.greet())"
预期输出:
Hello, Python!
参考
Ubuntu20.04安装kalibr
相关文章:
Ubuntu20.04安装kalibr
文章目录 环境配置安装wxPython下载编译测试报错1问题描述问题分析问题解决 参考 环境配置 Ubuntu20.04,python3.8.10,boost自带的1.71 sudo apt update sudo apt-get install python3-setuptools python3-rosinstall ipython3 libeigen3-dev libboost…...
)
Flink 任务启动脚本-V2(包括ck启动)
#!/bin/bash#crontab时设置,如果依赖其他环境变量配置,可以在脚本执行一下环境变量脚本 source /etc/profile# 进入脚本目录 curdirdirname "$0" curdircd "$curdir"; pwd echo "进入启动脚本目录 $curdir"# 定义应用程序…...

扫雷-完整源码(C语言实现)
云边有个稻草人-CSDN博客 在学完C语言函数之后,我们就有能力去实现简易版扫雷游戏了(成就感满满),下面是扫雷游戏的源码,快试一试效果如何吧! 在test.c里面进行扫雷游戏的测试,game.h和game.c…...

python -从文件夹批量提取pdf文章的第n页,并存储起来
python -从文件夹批量提取pdf文章的第n页,并存储起来 废话不多说,看下面代码 讲解一下下面代码 reader PyPDF2.PdfReader (file) 将文件转化为PdfReader 对象,方便使用内置方法。 first_page reader.pages[0] 提取第一页 writer PyPDF…...

R Excel 文件操作指南
R Excel 文件操作指南 概述 R 语言是一种强大的统计分析工具,广泛用于数据分析和可视化。在实际应用中,经常需要将 R 语言与 Excel 文件结合使用,以便处理和分析数据。本指南将介绍如何在 R 中读取、写入和操作 Excel 文件。 准备工作 在…...

RabbitMQ 安装延迟队列插件 rabbitmq_delayed_message_exchange
前言: RabbitMQ 延迟队列插件(rabbitmq_delayed_message_exchange)是一个社区开发的插件,它为 RabbitMQ 添加了支持延迟消息的功能。通过这个插件,用户可以创建一种特殊的交换机类型 x-delayed-message,该…...

fatal error in include chain (rtthread.h):rtconfig.h file not found
项目搜索这个文件 rtconfig 找到后将其复制粘贴到 你的目录\Keil\ARM\ARMCC\include 应该还有cJSON,rtthread.h和 等也复制粘贴下...
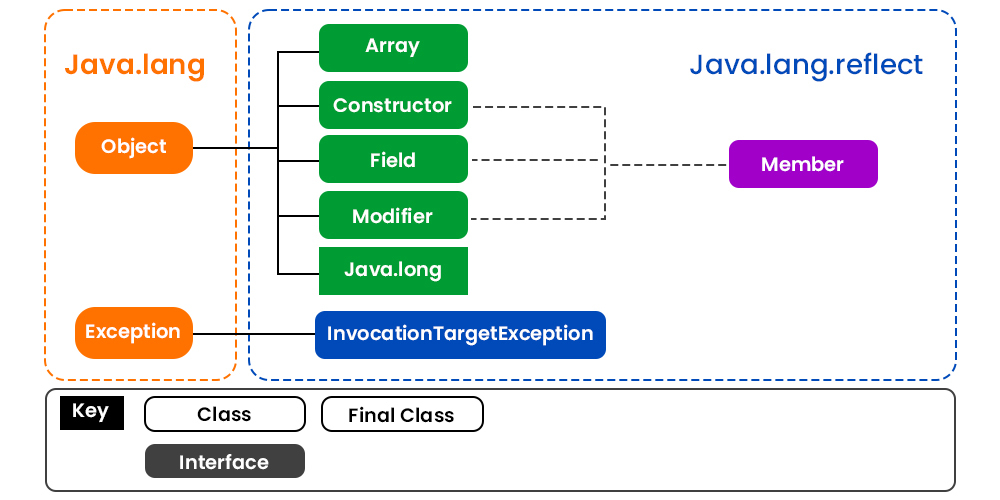
Java 反射(Reflection)
Java 反射(Reflection) Java 反射(Reflection)是一个强大的特性,它允许程序在运行时查询、访问和修改类、接口、字段和方法的信息。反射提供了一种动态地操作类的能力,这在很多框架和库中被广泛使用&#…...

Python爬取机车网车型数据并存入Mysql数据库
结果展示(文末附完整代码): 一、引言 在当今数字化时代,数据对于各个领域的重要性不言而喻。对于机车行业而言,获取丰富的机车品牌、车型及详细信息数据,能够为市场分析、消费者研究等提供有力支持。本文将…...

fpga 时序分析基础
目录 触发器的动态参数 同步时序电路分析 1. 时钟脉冲的特性 2. 同步时序电路分析 Timing Analyzer的应用 异步时序与亚稳态问题 时序分析就是对时序电路进行时序检查,通过分析电路中所有寄存器之间的路径延迟以检查电路的传输延迟是否会导致触发器的建立时间…...

python学习——二维列表的列表生成式
二维列表的列表生成式允许你生成一个列表,其中每个元素本身也是一个列表。这在处理矩阵或表格数据时非常有用。 以下是如何使用列表生成式来创建二维列表的示例: 文章目录 基本语法示例1. 创建一个 3x3 的单位矩阵2. 创建一个 4x4 的乘法表3. 创建一个 …...

【错误❌】——槽函数定义好但未初始化
public slots:void onClose(); 初始化即可成功:...
将3D物体点投影到2D图像平面上函数projectPoints()的使用)
OpenCV相机标定与3D重建(6)将3D物体点投影到2D图像平面上函数projectPoints()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 cv::fisheye::projectPoints 是 OpenCV 库中用于鱼眼镜头模型的函数,它将3D物体点投影到2D图像平面上。这个函数对于模拟或者理解鱼眼…...

【Linux】剧幕中的灵魂更迭:探索Shell下的程序替换
🎬 个人主页:谁在夜里看海. 📖 个人专栏:《C系列》《Linux系列》《算法系列》 ⛰️ 一念既出,万山无阻 目录 📖一、进程程序替换 1.替换的演示 ❓替换与执行流 ❓程序替换≠进程替换 2.替换的原理 …...

38 基于单片机的宠物喂食(ESP8266、红外、电机)
目录 一、主要功能 二、硬件资源 三、程序编程 四、实现现象 一、主要功能 基于STC89C52单片机,采用L298N驱动连接P2.3和P2.4口进行电机驱动, 然后串口连接P3.0和P3.1模拟ESP8266, 红外传感器连接ADC0832数模转换器连接单片机的P1.0~P1.…...

Unity中的数学应用 之 角色移动中单位化向量的妙用 (小学难度)
最近准备从简单到困难跟几个教程用以加强自己的业务能力,相信很多小伙伴都做过胡闹厨房这一个案例,其实这个案例比较初级,但是也包含了很多平常可能注意不到小细节,所以我就以它为举例,拓展其中的数学知识 CodeMonkey教…...

设置ip和代理DNS的WindowsBat脚本怎么写?
今天分享一个我们在工作时,常见的在Windows中通过批处理脚本(.bat 文件)来设置IP地址、代理以及DNS 相关配置的示例,大家可以根据实际需求进行修改调整。 一、设置静态IP地址脚本示例 以下脚本用于设置本地连接(你可…...
)
字符串分割转换(Java Python JS C++ C )
题目描述 给定一个非空字符串S,其被N个‘-’分隔成N+1的子串,给定正整数K,要求除第一个子串外,其余的子串每K个字符组成新的子串,并用‘-’分隔。 对于新组成的每一个子串,如果它含有的小写字母比大写字母多,则将这个子串的所有大写字母转换为小写字母; 反之,如果它…...

【Maven】项目创建
3. Maven的应用 本章主要内容: 使用 Maven 创建 JavaSE 项目使用 Maven 创建 JavaWeb 项目,在本地部署 Tomcat 测试导入 Maven 项目 3.1 基于Maven开发JavaSE的项目 3.1.1 流程 1、File—>new—>Project—>Empty Project Location࿱…...

number的++和--运算 C#
number10 请计算num number --number - number number就是先对number运算,然后再给number赋值--number 先给number赋值,再拿来运算 using System;class Program {static void Main(string[] args){int number 10;int a, b, c, number1, number2;…...
)
UOS系统下WPS卸载不干净?手把手教你用命令行精准清理(附dpkg/apt组合拳)
UOS系统下WPS卸载不干净?手把手教你用命令行精准清理 在UOS系统日常使用中,WPS Office作为常用办公软件,有时因版本更新或功能调整需要彻底卸载。但不少用户发现,通过图形界面或简单命令卸载后,系统中仍残留配置文件、…...

13456
12356...

Unity主题系统设计:状态驱动的主题抽象与自动注入方案
1. 这不是换个颜色那么简单:为什么Unity项目里“换肤”总在发布前夜崩盘?你有没有经历过这样的场景:美术同学凌晨两点发来一套新主题资源包,UI设计师说“这次配色更符合品牌调性”,产品说“上线前必须支持深色模式”&a…...

Simulink中Repeating Sequence锯齿波显示恒为0解决方案
锯齿波设置如图1时,其示波器显示恒为0(如图2)。图1图2于是新建模型,只添加Repeating Sequence模块,采用原始设置发现可以正常输出锯齿波,于是调整时间参数,发现当时间设置为≥[0 0.06]时可以正常…...
Transient、QuickEye、VerifyEye傻傻分不清?一文讲透Ansys里三种眼图仿真方法的适用场景与避坑指南
Transient、QuickEye、VerifyEye深度解析:Ansys眼图仿真技术选型实战指南 在高速数字系统设计中,眼图分析是评估信号完整性的黄金标准。面对Ansys工具链中三种截然不同的眼图生成方法,工程师常常陷入选择困境——是追求精确度的传统瞬态分析&…...
)
Unity事件系统实战:用事件驱动重构你的金币拾取逻辑(告别硬编码)
Unity事件系统实战:用事件驱动重构你的金币拾取逻辑(告别硬编码)在游戏开发中,我们经常会遇到这样的场景:玩家拾取金币后,需要更新UI、播放音效、解锁成就、保存数据……如果把这些逻辑全部写在金币拾取的代…...

危急时刻的六条基本安全提示
人机协作,AI模型:Deepseek 仅供参考 危急时刻的六条基本安全提示 以下内容仅为通用性安全建议,供在紧急情况下保持冷静、保护自身安全时参考。所有建议均基于常理和公共安全常识,不包含任何具体操作细节或可能被不当使用的信息…...

DAIR-V2X-V数据集深度评测:与KITTI、nuScenes比,它到底强在哪?
DAIR-V2X-V数据集深度评测:与KITTI、nuScenes比,它到底强在哪? 当技术团队着手开发面向中国道路的自动驾驶系统时,数据集的选择往往成为第一个关键决策点。过去十年间,KITTI和nuScenes等国际数据集一直是行业标杆&…...
)
Frida无Root Hook PC微信小程序源码(Electron+Chromium)
1. 这不是“破解”,而是一次对微信小程序运行机制的逆向观察 你有没有试过,在PC版微信里点开一个小程序,想看看它背后是怎么写的?比如某个电商小程序的优惠券逻辑、某个工具类小程序的数据渲染方式,甚至只是单纯好奇—…...

CANN runtime:昇腾NPU 运行时的职责边界
个人主页:ujainu 文章目录前言为什么需要运行时这一层runtime管什么,不管什么Stream:并行的基本调度单位Event:跨Stream的同步锚点内存池化:少一次malloc就少一次卡顿任务队列:从计算图到硬件指令的最后一跳…...