电子应用设计方案-30:智能扫地机器人系统方案设计
智能扫地机器人系统方案设计
一、引言
随着人们生活节奏的加快和对生活品质的追求,智能家居产品越来越受到消费者的青睐。智能扫地机器人作为一种能够自动清扫地面的智能设备,为人们节省了大量的时间和精力。本方案旨在设计一款功能强大、智能化程度高、清洁效果好的智能扫地机器人系统。
二、系统概述
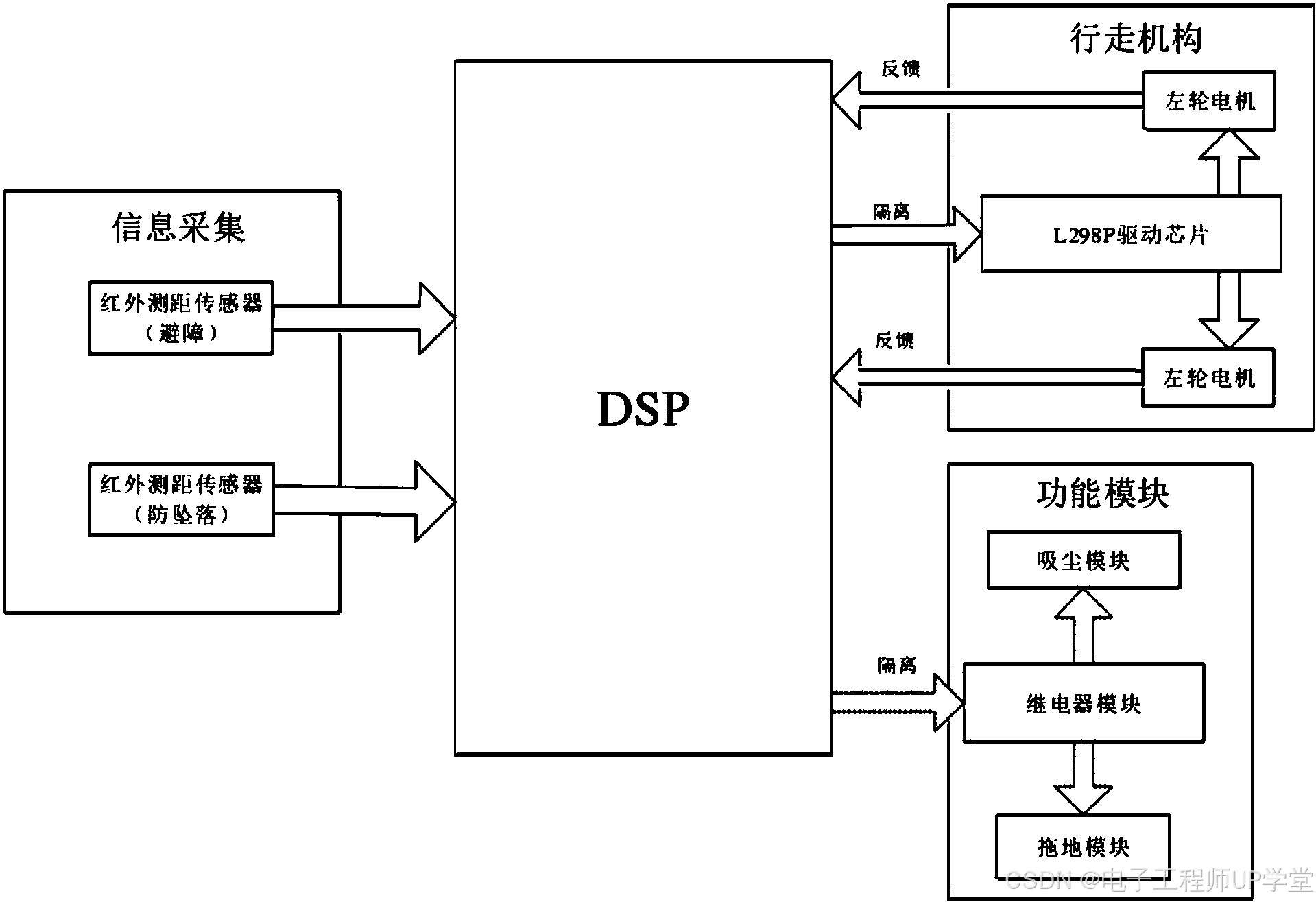
智能扫地机器人是一种能够自主移动、规划清扫路径、识别障碍物并完成清扫任务的智能设备。它通常由机械结构、传感器系统、控制系统、驱动系统、清扫系统和电源系统等部分组成。
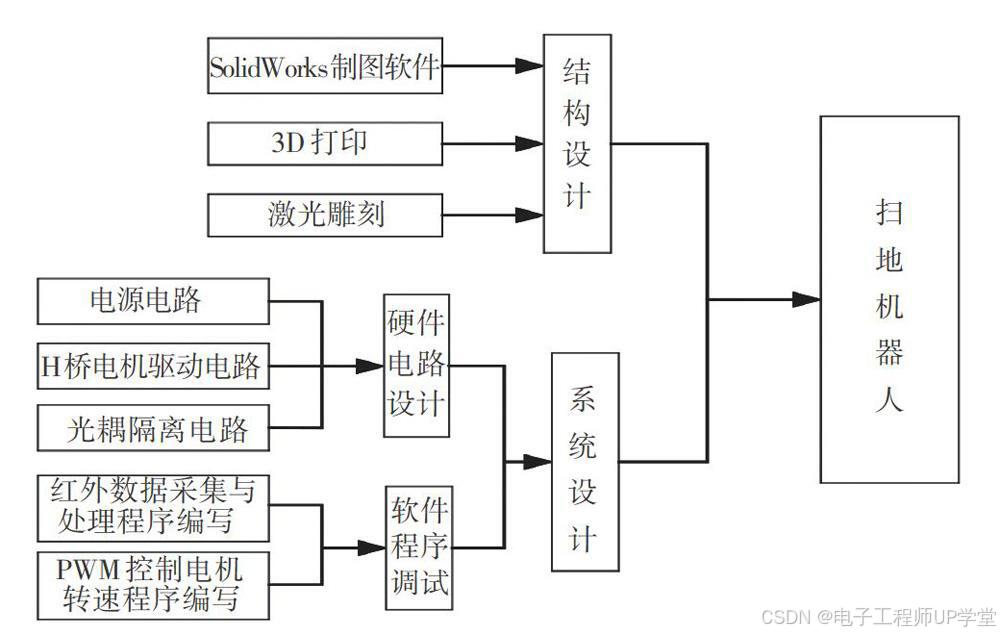
三、机械结构设计
(一)外形设计
智能扫地机器人的外形通常为圆形或方形,以方便在室内自由移动。其高度应尽量低,以便能够进入家具底部进行清扫。外壳采用高强度塑料或金属材质,具有良好的耐磨损和抗冲击性能。
(二)行走机构
行走机构通常由驱动轮和万向轮组成。驱动轮负责提供动力,使机器人能够前进、后退和转弯。万向轮则用于支撑机器人的重量和调整方向。驱动轮采用橡胶材质,具有良好的抓地力和耐磨性。
(三)清扫机构
清扫机构是智能扫地机器人的核心部件之一,主要包括边刷、滚刷和吸尘口。边刷位于机器人的两侧,用于将角落和边缘的灰尘扫向吸尘口。滚刷位于机器人的底部,通过旋转将地面的灰尘和杂物卷入吸尘口。吸尘口连接着吸尘器,将吸入的灰尘和杂物收集到尘盒中。
(四)尘盒设计
尘盒用于收集清扫过程中吸入的灰尘和杂物,其容量应根据机器人的清扫面积和使用频率进行设计。尘盒通常采用可拆卸式设计,方便用户清理和更换。
四、传感器系统
(一)碰撞传感器
碰撞传感器安装在机器人的外壳上,用于检测机器人与障碍物的碰撞。当机器人碰撞到障碍物时,碰撞传感器会向控制系统发送信号,控制系统会控制机器人改变方向,避免再次碰撞。
(二)红外传感器
红外传感器用于检测机器人前方和侧面的障碍物。它通过发射红外线并接收反射回来的信号来判断障碍物的距离和位置。红外传感器具有响应速度快、精度高的特点,但检测范围相对较窄。
(三)超声波传感器
超声波传感器用于检测机器人与障碍物的距离。它通过发射超声波并接收反射回来的信号来计算障碍物的距离。超声波传感器具有检测范围广、精度高的特点,但响应速度相对较慢。
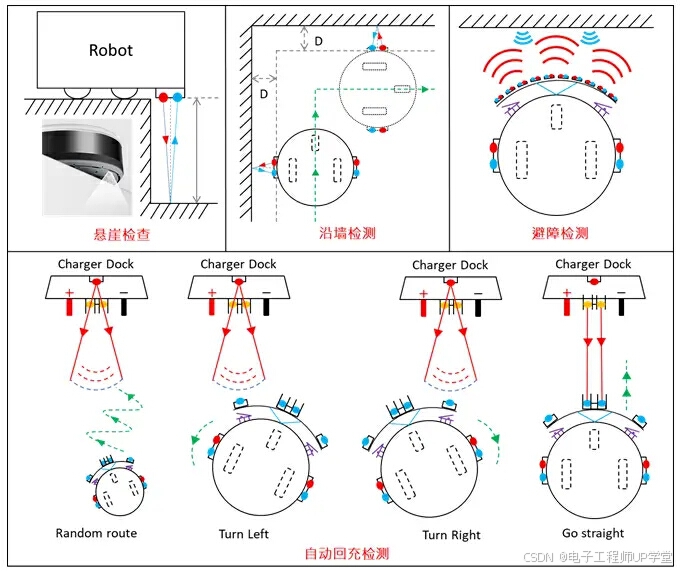
(四)悬崖传感器
悬崖传感器安装在机器人的底部,用于检测地面的落差。当机器人检测到前方地面有较大落差时,会立即停止前进,避免掉落。
(五)陀螺仪和加速度计
陀螺仪和加速度计用于检测机器人的姿态和运动状态。它们可以帮助机器人保持平衡,准确地规划清扫路径,并在遇到斜坡时调整行走速度。
(六)视觉传感器(可选)
视觉传感器可以为机器人提供更丰富的环境信息,如识别家具、房间布局等。通过图像识别技术,机器人能够更智能地规划清扫路径和避开障碍物。但视觉传感器的成本较高,且对计算能力要求较高。
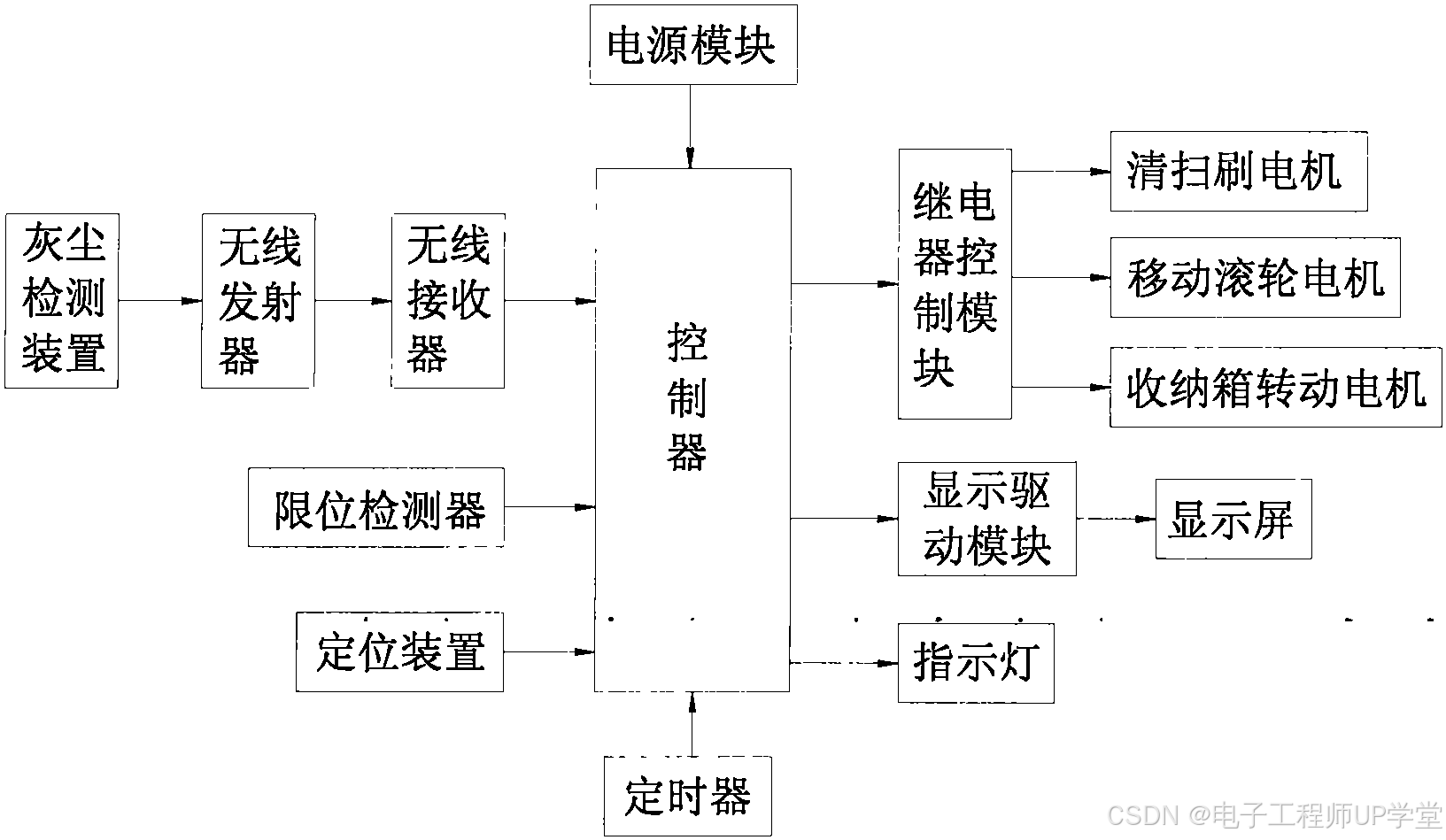
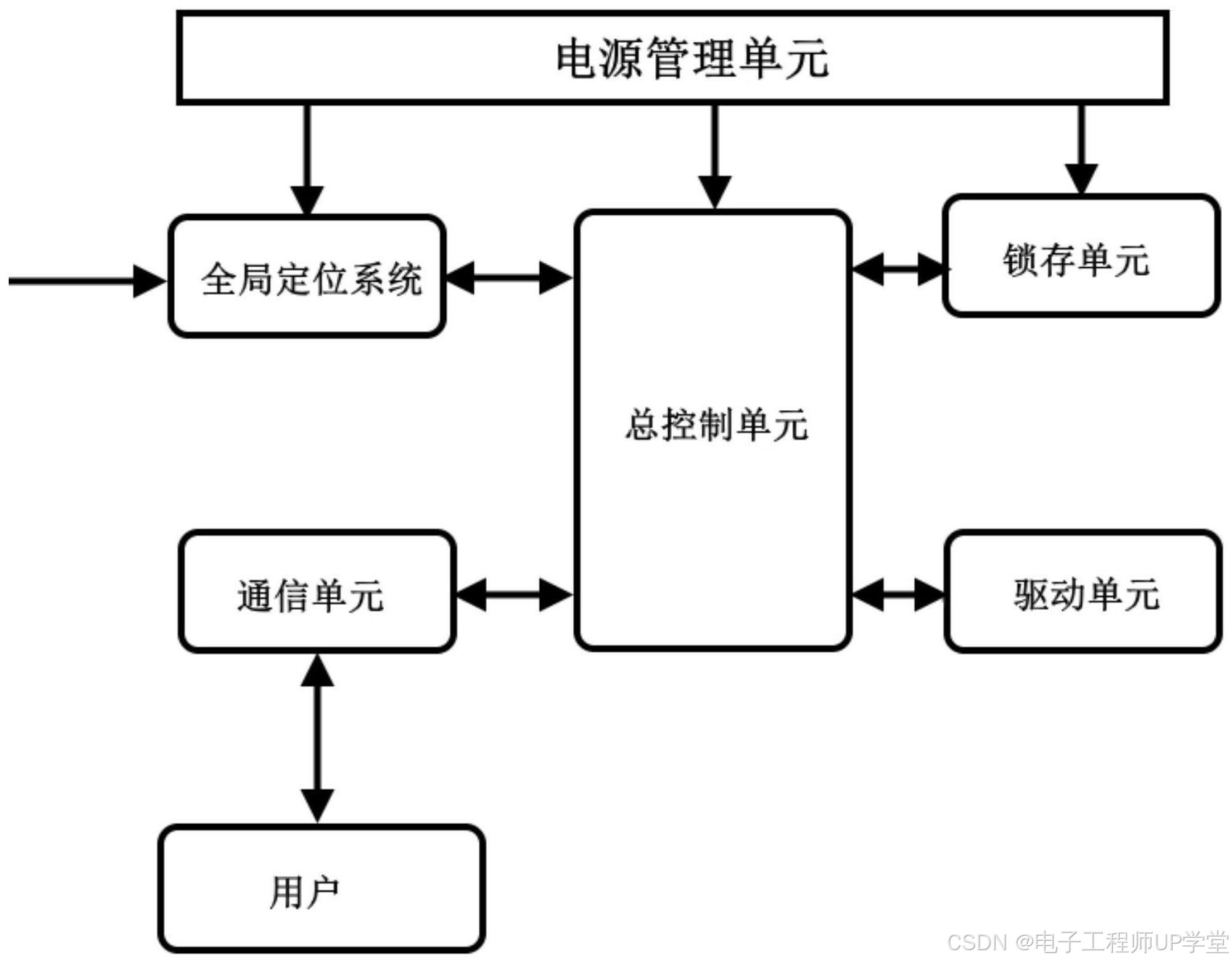
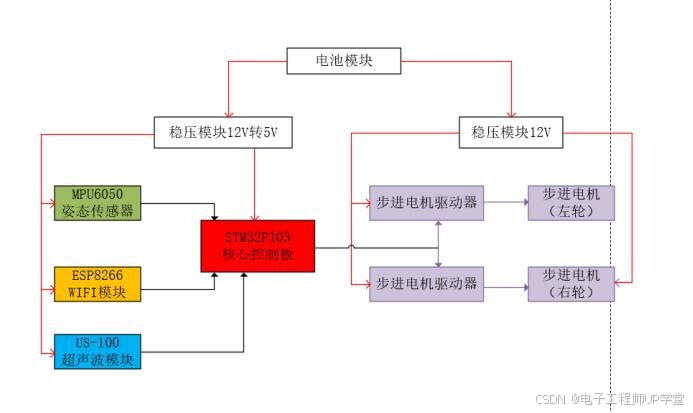
五、控制系统
(一)微控制器
微控制器是智能扫地机器人的控制核心,负责处理传感器采集的数据、控制驱动系统和清扫系统的工作、规划清扫路径等。常用的微控制器有 STM32、Arduino 等。
(二)控制算法
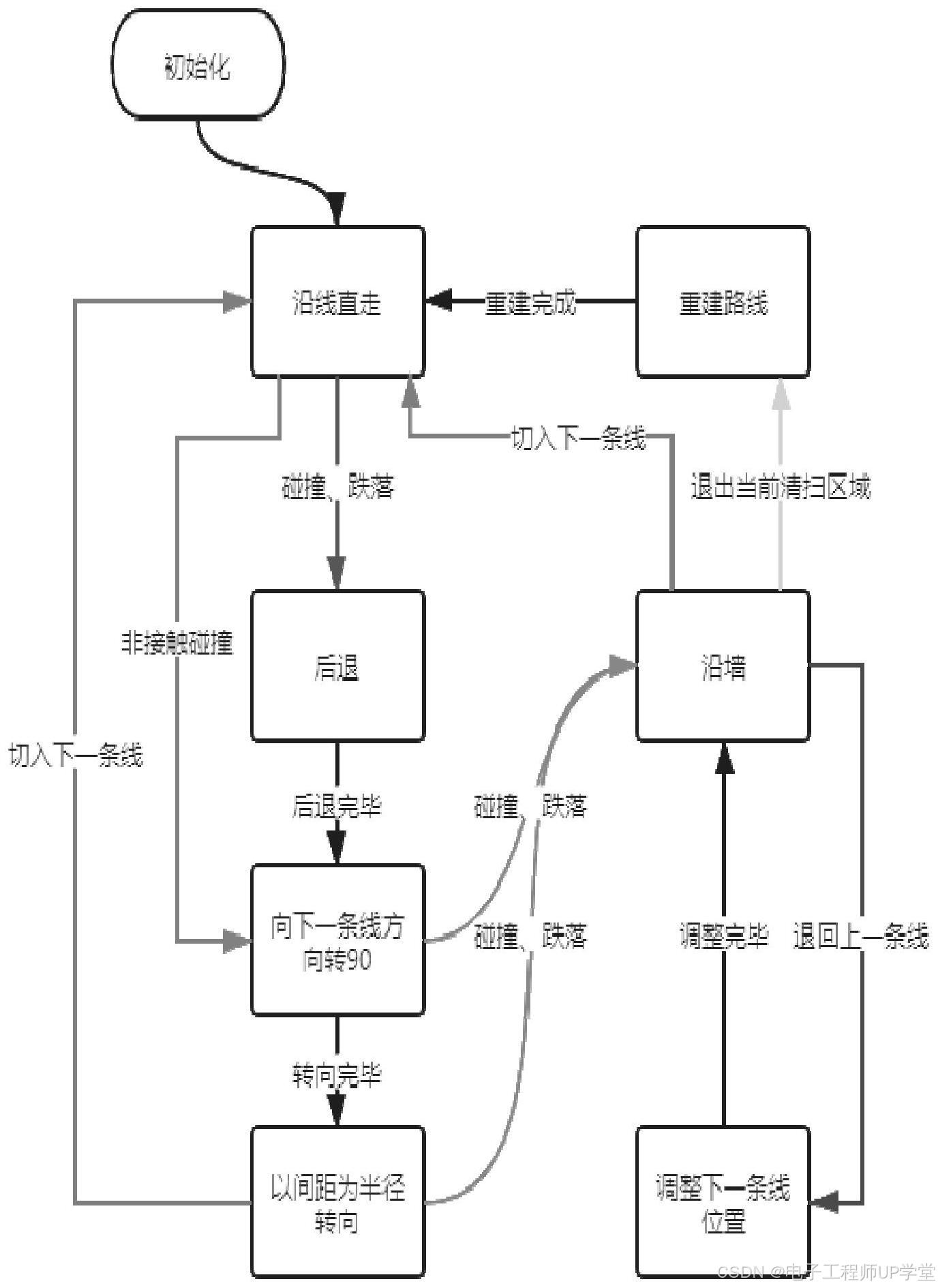
1. 清扫路径规划算法
- 随机式清扫:机器人在房间内随机移动,直到覆盖整个区域。这种方式简单,但清扫效率较低。
- 规划式清扫:机器人通过传感器获取环境信息,构建地图,并根据地图规划出高效的清扫路径。常见的规划式清扫算法有弓字形清扫、螺旋形清扫等。
2. 避障算法
- 基于传感器数据的避障:根据碰撞传感器、红外传感器、超声波传感器等采集的数据,判断障碍物的位置和距离,并控制机器人避开障碍物。
- 机器学习避障:通过训练机器人识别不同类型的障碍物,并根据学习到的经验进行避障。
(三)存储单元
存储单元用于存储机器人的控制程序、地图数据、清扫记录等信息。常用的存储介质有闪存(Flash)和随机存取存储器(RAM)。
六、驱动系统
(一)电机
驱动电机负责为机器人的行走和清扫机构提供动力。常见的电机类型有直流电机和无刷直流电机。直流电机成本较低,但效率和寿命相对较短;无刷直流电机效率高、寿命长,但成本较高。
(二)驱动电路
驱动电路用于将微控制器输出的控制信号转换为电机所需的驱动信号,实现电机的正反转、调速等功能。
七、清扫系统
(一)吸尘器
吸尘器是清扫系统的核心部件,负责产生吸力将地面的灰尘和杂物吸入尘盒。吸尘器的性能取决于其功率、风量和真空度等参数。
(二)边刷和滚刷
边刷和滚刷通过旋转将地面的灰尘和杂物扫向吸尘口,提高清扫效率。边刷和滚刷的材质、长度和转速等参数会影响清扫效果。
(三)湿布拖地模块(可选)
对于一些需要拖地的用户需求,可以增加湿布拖地模块。该模块通常包括水箱、湿布和压力调节装置,能够在清扫的同时进行拖地,进一步提高清洁效果。
八、电源系统
(一)电池
智能扫地机器人通常采用锂电池作为电源,其容量应根据机器人的工作时间和充电时间进行选择。一般来说,电池容量越大,机器人的工作时间越长,但充电时间也会相应增加。
(二)充电管理
充电管理模块负责监控电池的电量,当电池电量低于一定阈值时,控制机器人返回充电座进行充电。充电座通常通过市电供电,并通过接触式或无线充电方式为机器人充电。
九、通信系统
(一)蓝牙通信
蓝牙通信用于机器人与手机等移动设备之间的短距离通信。用户可以通过手机 APP 对机器人进行控制和设置,查看清扫记录和故障信息等。
(二)Wi-Fi 通信
Wi-Fi 通信用于机器人与家庭网络的连接,实现远程控制和数据上传。通过云服务器,用户可以在任何有网络的地方对机器人进行控制和监控。
十、软件系统
(一)手机 APP 软件
1. 设备连接与控制
- 用户可以通过手机 APP 搜索并连接智能扫地机器人,实现对机器人的启动、停止、回充等基本操作。
- 支持设置清扫模式(如自动清扫、定点清扫、沿边清扫等)和清扫强度(如标准、强力、静音等)。
2. 地图绘制与管理
- 机器人在清扫过程中会自动绘制房间地图,并实时上传至手机 APP。用户可以在地图上查看清扫区域、已清扫区域和未清扫区域。
- 支持对地图进行分区管理,用户可以为不同的区域设置不同的清扫模式和清扫时间。
3. 清扫计划制定
- 用户可以根据自己的生活习惯和需求,在手机 APP 上制定清扫计划。例如,设置每天定时清扫、每周特定日期清扫等。
4. 设备状态监控与故障提示
- 手机 APP 实时显示机器人的工作状态,包括电量、工作模式、清扫进度等。
- 当机器人出现故障时,手机 APP 会及时推送故障提示信息,并提供相应的解决建议。
5. 耗材管理与提醒
- 记录机器人的耗材使用情况,如边刷、滚刷、滤网等的使用时间和更换周期。
- 当耗材需要更换时,手机 APP 会发送提醒通知,方便用户及时购买和更换。
(二)机器人端软件
1. 传感器数据采集与处理
- 实时采集碰撞传感器、红外传感器、超声波传感器等的检测数据,并进行滤波、融合和分析,以准确感知周围环境和障碍物。
2. 清扫路径规划与执行
- 根据传感器数据和预设的清扫模式,规划出高效的清扫路径,并控制驱动系统按照规划路径移动。
- 在清扫过程中,实时调整路径,避开障碍物和危险区域。
3. 与手机 APP 和云服务器的通信
- 与手机 APP 保持蓝牙或 Wi-Fi 连接,实时上传清扫数据和设备状态,接收用户的控制指令。
- 与云服务器进行数据同步,实现远程控制和数据分析。
4. 系统自检与故障处理
- 定期对自身的硬件和软件进行自检,检测电池状态、电机运行情况、传感器工作是否正常等。
- 当检测到故障时,采取相应的应急措施,如停止工作、返回充电座、发送故障报警等,并尝试自行修复一些简单的故障。
十一、安全与可靠性设计
(一)过载保护
当电机或驱动电路出现过载情况时,系统应能自动切断电源,防止设备损坏。
(二)短路保护
电路中应设置短路保护装置,当发生短路故障时,迅速切断电源,避免火灾等事故的发生。
(三)电池保护
对电池的充电和放电过程进行监控和管理,防止过充、过放和过热,延长电池寿命,确保使用安全。
(四)软件容错
在软件设计中,应考虑各种异常情况的处理,如传感器数据异常、通信中断等,保证系统在出现故障时能够安全停机或采取应急措施。
(五)防水防尘设计
为了提高机器人在复杂环境中的可靠性,应进行防水防尘设计,确保电子部件不受潮湿和灰尘的影响。
十二、产品测试与优化
(一)功能测试
1. 清扫性能测试
- 在不同类型的地面(如地毯、木地板、瓷砖等)上投放一定量的灰尘、杂物和毛发等,测试机器人的清扫效果,包括清扫覆盖率、清洁度等。
- 对比不同清扫模式和清扫强度下的清扫效果,评估机器人的性能。
2. 避障能力测试
- 在机器人的运行路径上设置各种障碍物(如家具、墙壁、电线等),测试机器人的避障能力,包括避障成功率、避障反应时间等。
- 评估机器人在不同环境光照条件下的避障性能。
3. 路径规划测试
- 在较大的空间内,观察机器人的清扫路径,评估其路径规划的合理性和效率,如是否存在重复清扫、遗漏区域等。
- 测试机器人在复杂环境(如多个房间、狭窄通道等)中的路径规划能力。
4. 续航能力测试
- 让机器人在满电状态下连续工作,直到电池电量耗尽,记录工作时间和清扫面积,评估其续航能力。
- 测试机器人在不同工作模式下的续航表现。
(二)可靠性测试
1. 机械部件耐久性测试
- 对驱动轮、万向轮、边刷、滚刷等机械部件进行长时间的运行测试,检查其磨损情况和可靠性。
- 模拟机器人在不同地面条件下的行走情况,评估机械部件的适应性。
2. 电子部件稳定性测试
- 对微控制器、传感器、电机驱动电路等电子部件进行高温、低温、潮湿等环境下的长时间工作测试,检查其稳定性和可靠性。
- 进行电磁兼容性测试,确保电子部件在复杂电磁环境下能正常工作。
3. 软件稳定性测试
- 让机器人连续运行较长时间,检查软件系统是否会出现死机、崩溃等异常情况。
- 对软件系统进行压力测试,模拟大量数据处理和复杂任务执行的情况,评估其稳定性。
(三)用户体验测试
1. 操作便捷性测试
- 邀请不同年龄段和文化程度的用户试用智能扫地机器人,评估其操作界面的友好性、操作流程的简洁性和操作指令的易懂性。
- 收集用户对手机 APP 操作的反馈意见,优化操作体验。
2. 噪音测试
- 在不同工作模式下,测量机器人运行时产生的噪音水平,评估其对用户生活的影响。
- 优化机器人的结构和电机控制算法,降低噪音。
3. 外观与尺寸适应性测试
- 观察机器人在不同家居环境中的摆放和移动情况,评估其外观设计是否美观、尺寸是否合适,是否容易与家具和其他物品协调搭配。
- 收集用户对机器人外观和尺寸的意见,进行改进。
(四)优化与改进
根据测试结果,对智能扫地机器人的机械结构、传感器系统、控制系统、清扫系统、电源系统等进行优化和改进。对软件系统进行bug修复和功能完善,提高产品的性能、可靠性和用户体验。经过多次测试和优化,确保产品达到预期的质量标准和市场需求。
十三、成本控制
在设计和开发智能扫地机器人时,需要充分考虑成本因素,以确保产品在市场上具有竞争力。以下是一些成本控制的建议:
(一)零部件选型
在选择传感器、电机、微控制器等零部件时,应在满足性能要求的前提下,选择性价比高的产品。可以通过与供应商谈判、批量采购等方式降低零部件成本。
(二)生产工艺优化
优化产品的结构设计,减少零部件数量和复杂程度,降低生产成本。同时,改进生产工艺,提高生产效率,降低人工成本。
(三)供应链管理
建立稳定的供应链体系,与供应商建立长期合作关系,确保零部件的稳定供应和价格优惠。合理安排库存,减少库存成本和资金占用。
(四)市场定位与定价策略
根据产品的功能和性能特点,合理定位目标市场和客户群体。制定合理的价格策略,既要保证产品的利润空间,又要具有市场竞争力。
十四、总结
本智能扫地机器人系统方案设计综合考虑了机械结构、传感器系统、控制系统、清扫系统、电源系统、通信系统和软件系统等多个方面,旨在为用户提供一款高效、智能、便捷的清洁设备。通过不断的优化和改进,相信该产品能够满足用户的需求,在市场上取得良好的反响。

相关文章:
电子应用设计方案-30:智能扫地机器人系统方案设计
智能扫地机器人系统方案设计 一、引言 随着人们生活节奏的加快和对生活品质的追求,智能家居产品越来越受到消费者的青睐。智能扫地机器人作为一种能够自动清扫地面的智能设备,为人们节省了大量的时间和精力。本方案旨在设计一款功能强大、智能化程度高、…...

HTML飞舞的爱心(完整代码)
写在前面 HTML语言实现飞舞的爱心完整代码。 完整代码 <!DOCTYPE html> <html lang="en"><head><meta charset="UTF-8"><title>飞舞爱心</title><style>* {margin: 0;padding: 0;}html,body {overflow: hidd…...

android shader gl_Position是几个分量
在Android的OpenGL ES中,gl_Position是顶点着色器(Vertex Shader)的一个内置输出变量,它用于指定顶点在裁剪空间(Clip Space)中的位置。gl_Position是一个四维向量(4-component vectorÿ…...

spine 动画层 动态权重
前奏.业务背景 这边想实现一个功能,项目中有 一只猫 猫的头会盯着逗猫棒移动。因为素材还没到所以这里使用了 spine 自带的猫头鹰。他的动画 刚好挺有针对性:(关联上篇)https://blog.csdn.net/nicepainkiller/article/details/144…...

《Python基础》之Python中可以转换成json数据类型的数据
目录 一、JSON简介 JSON有两种基本结构 1、对象(Object) 2、数组(Array) 二、将数据装换成json数据类型方法 三、在Python中,以下数据类型可以直接转换为JSON数据类型 1、字典(Dictionary)…...

在oracle下载jdk显示400 Bad Request Request Header Or Cookie Too Large
下载JDK17,官网地址:【https://www.oracle.com/cn/java/technologies/downloads/#jdk17-windows】 问题: 出现 400 Bad Request: Request Header Or Cookie Too Large 错误,通常是由于浏览器存储的 Cookies 或请求头过大所导致的…...

MongoDB注入攻击测试与防御技术深度解析
MongoDB注入攻击测试与防御技术深度解析 随着NoSQL数据库的兴起,MongoDB作为其中的佼佼者,因其灵活的数据模型和强大的查询能力,受到了众多开发者的青睐。然而,与任何技术一样,MongoDB也面临着安全威胁,其…...

【Java基础入门篇】前言
Java基础入门篇 本系列内容主要针对Java基础知识,总共包含四大部分内容: 变量、数据类型和运算符控制语句和递归算法面向对象和JVM底层分析数组和排序 学习需要具备: IDEA编译器 JDK1.8版本 写在前面 在Java入门的最开始,我们需…...

Oracle 建表的存储过程
建表的存储过程 下面是建表的存储过程,用途:通过不同的表,根据不同过滤条件,得到某个字段,例如neid,然后创建一个新表T,表T的表名为拼接XXXX_XXX_neid,表T的字段自行添加 xxx&…...

【Debug】hexo-github令牌认证 Support for password authentication was removed
title: 【Debug】hexo-github令牌认证 date: 2024-07-19 14:40:54 categories: bug解决日记 description: “Support for password authentication was removed on August 13, 2021.” cover: https://pic.imgdb.cn/item/669b38ebd9c307b7e9f3e5e0.jpg 第一章 第一篇博客记录一…...
)
torch.is_floating_point(input)
torch.is_floating_point(input) input: 输入张量 如果输入的数据类型是 浮点数据类型 ,则返回 True。否则返回False。 浮点数据类型:torch.float64、torch.float32、torch.float16 、 torch.bfloat16 import torch# 创建一个浮点数张量 float_tensor torch.te…...

【分布式】分布式事务
目录 1、事务的发展 2、本地事务 (1)如何保障原子性和持久性? (2)如何保障隔离性? 2、全局事务 (1)XA事务的两段式提交 (2)XA事务的三段式提交…...

Spring Data 简介
Spring Data 是一个用于简化数据库访问的框架,它是 Spring 生态系统中的重要组成部分。以下是详细介绍: 一、背景和目的 在开发应用程序时,数据访问层的实现往往是比较复杂和繁琐的。开发人员需要编写大量的代码来实现诸如数据库连接、查询…...

【娱乐项目】基于批处理脚本与JavaScript渲染视频列表的Web页面
Demo介绍 一个简单的视频播放器应用,其中包含了视频列表和一个视频播放区域。用户可以通过点击视频列表中的项来选择并播放相应的视频,播放器会自动播放每个视频并在播放完毕后切换到下一个视频。本项目旨在通过自动化脚本和动态网页渲染,帮助…...

[MySQL]流程控制语句
流程控制语句需要借助存储过程才有效。关于存储过程,我会在后续的文章详述,本篇文章只是阐述流程控制语句。因此,大家只需要注意存储过程中相应的流程控制语句即可。 如果文中阐述不全或不对的,多多交流。 参考笔记三,…...

Flink在Linux系统上的安装与入门
一、Flink的引入 这几年大数据的飞速发展,出现了很多热门的开源社区,其中著名的有Hadoop、Storm,以及后来的Spark,他们都有着各自专注的应用场景。Spark 掀开了内存计算的先河,也以内存为赌注,赢得了内存计…...

微信小程序Webview与H5通信
背景 近期有个微信小程序需要用到web-view嵌套H5的场景,该应用场景需要小程序中频繁传递数据到H5进行渲染,且需要保证页面不刷新。 由于微信小程序与H5之间的通信限制比较大,显然无法满足于我的业务场景 探索 由于微信小程序与webview的环境是…...

Debezium Engine监听binlog实现缓存更新与业务解耦
飞书文档 解决缓存与数据源数据不一致的方案有很多, 各有优缺点; 1.0、旁路缓存策略, 直接同步更新 读取流程: 查询缓存。如果缓存命中,则直接返回结果。如果缓存未命中,则查询数据库。将数据库查询到的数据写入缓存,并设置一个…...

docker搭建socks5代理
准备工作 VPS安全组/策略放行相应端口如启用了防火墙,放行相应端口 实际操作 我们选用“历史悠久”的Dante socks5 代理服务器,轻量、稳定。Github也有对dante进行进一步精简的镜像,更为适宜。github项目地址如下: https://gi…...

scanf函数和printf函数的格式化输入输出
#include<stdio.h> int main() {int a;double b;char c;scanf("a%d,b%lf:c%c",&a,&b,&c); //float型输入时使用%f占位,double型使用%lf占位;输出时二者相同都是%f即可。if(a>0)printf("a%-10d,b%20.3lf,c%c",a…...

Java集成Gemma大模型:本地推理与生产部署实战指南
1. 项目概述:当Gemma遇上Java 最近在开源社区里,一个名为 mukel/gemma4.java 的项目引起了我的注意。光看这个标题,熟悉AI模型和Java生态的朋友可能已经会心一笑。没错,这个项目直指一个核心痛点:如何让Google最新推…...

MCP协议专用Linter:mcp-lint工具的设计、规则与集成实践
1. 项目概述:一个为MCP协议量身定制的代码质量守护者 最近在折腾MCP(Model Context Protocol)相关的开发,发现一个挺有意思的项目: robert19001-cmyk/mcp-lint 。光看名字,你大概能猜到它是个代码检查工具…...

markdownReader:终极Chrome插件,让本地Markdown文件阅读体验提升300%
markdownReader:终极Chrome插件,让本地Markdown文件阅读体验提升300% 【免费下载链接】markdownReader markdownReader is a extention for chrome, used for reading markdown file. 项目地址: https://gitcode.com/gh_mirrors/ma/markdownReader …...
)
Tarjan算法:从DFS序到强连通分量的寻路指南(附C++实战与缩点技巧)
1. 从迷宫探索到强连通王国:Tarjan算法的生活隐喻 想象你正在探索一座巨大的迷宫,手里拿着粉笔和记事本。每走到一个新的岔路口,你就在墙上标记数字(第一个到的路口标1,第二个标2...),这就是DFS…...
)
Cadence AMS Designer 保姆级教程:手把手教你搞定数模混合仿真(含Verilog模块导入避坑指南)
Cadence AMS Designer 保姆级教程:手把手教你搞定数模混合仿真(含Verilog模块导入避坑指南) 数模混合仿真一直是芯片设计中的关键环节,尤其对于刚接触Cadence环境的新手工程师或在校学生来说,从零开始搭建混合仿真环境…...

Android HWASan 详解:硬件标记原理、Clang 启用与排障实践
Android HWASan 详解:硬件标记原理、Clang 启用与排障实践 HWASan(Hardware-assisted AddressSanitizer)是面向 AArch64 的一类 Native(C/C)内存错误检测机制:利用指针与内存区域上的 短标签(T…...

英雄联盟Akari助手:5大核心功能提升你的游戏体验终极指南
英雄联盟Akari助手:5大核心功能提升你的游戏体验终极指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否厌倦了在英雄联盟对…...

Keil5 UV4目录下的global.prop文件,除了改黑色背景还能玩出什么花样?
Keil5 UV4目录下的global.prop文件:从黑色主题到深度定制指南 如果你已经厌倦了Keil5默认的白色界面,或者对网上流传的"黑色背景修改教程"感到意犹未尽,那么这篇文章将带你深入探索global.prop这个配置文件的无限可能。作为Keil μ…...

5分钟掌握直播间数据抓取:Live Room Watcher终极指南
5分钟掌握直播间数据抓取:Live Room Watcher终极指南 【免费下载链接】live-room-watcher 📺 可抓取直播间 弹幕, 礼物, 点赞, 原始流地址等 项目地址: https://gitcode.com/gh_mirrors/li/live-room-watcher Live Room Watcher是一款基于Java开发…...

AI编程助手上下文压缩引擎:降低Token成本60-99%的智能解决方案
1. 项目概述:一个为AI编程工具设计的上下文压缩引擎如果你每天都在用Cursor、Claude Code或者GitHub Copilot这类AI编程助手,那你肯定对“上下文窗口”和“Token消耗”这两个词不陌生。每次你让AI助手“看看这个文件”、“运行一下git status”或者“检查…...