vue3使用monaco编辑器(VSCode网页版)
vue3使用monaco编辑器(VSCode网页版)
- 文章说明
- 参考文章
- 核心代码
- 效果展示
- 实践说明
- 源码下载
文章说明
一直在找网页版的编辑器,网页版的VSCode功能很强大,这个monaco就是VSCode样式的编辑器,功能很强大,可以直接使用;它的版本有变更,导致可能vue3使用会报一些小错误,我这里书写一个示例,来简单使用该组件,主要解决 babel.cosfig.js 和 vue.config.js 内缺少配置导致的报错
参考文章
Vue3 集成Monaco Editor编辑器
使用的demo代码是从这里复制过来的,不同的是,这里稍微补充了一下vue3相关的配置,不然会运行报错
Vue3中使用Monaco Editor代码编辑器
这篇文章中提到了 vue.config.js 的配置
vue报错之“ Static class blocks are not enabled. Please add `@babel/plugin-transform-class-static-block”
最后一个 babel.config.js 中需要添加的配置,在这篇文章中找到了
核心代码
依赖安装
"dependencies": {"core-js": "^3.8.3","monaco-editor": "^0.52.0","monaco-editor-webpack-plugin": "^7.1.0","vue": "^3.2.13"},
vue.config.js
const {defineConfig} = require('@vue/cli-service')
const MonacoWebpackPlugin = require('monaco-editor-webpack-plugin')module.exports = defineConfig({transpileDependencies: true,lintOnSave: false,publicPath: './',configureWebpack: {plugins: [new MonacoWebpackPlugin()]}
})
babel.config.js
module.exports = {presets: ['@vue/cli-plugin-babel/preset'],plugins: ["@babel/plugin-transform-private-methods", "@babel/plugin-transform-class-static-block"],
}
组件源码
<script setup>
import * as monaco from 'monaco-editor';
import {onMounted, onUnmounted, ref} from 'vue'const editorContainer = ref();
const editor = ref();onMounted(() => {if (editorContainer.value) {editor.value = monaco.editor.create(editorContainer.value, {value: "",language: 'javascript',theme: 'vs-dark',codeLens: true,folding: true,snippetSuggestions: 'inline',tabCompletion: 'on',foldingStrategy: 'auto',smoothScrolling: true,});editor.value.onDidChangeModelContent(() => {console.log('编辑器内容变更')})}
});onUnmounted(() => {if (editor.value) {editor.value.dispose();}
});
</script><template><div ref="editorContainer" class="container"></div>
</template><style scoped>
.container {width: 100%;height: 100%;
}
</style>
App.vue
<script setup>
import Editor from "@/Editor.vue";
</script><template><div style="width: 100vw; height: 100vh"><Editor/></div>
</template><style>
* {margin: 0;padding: 0;box-sizing: border-box;
}
</style>
效果展示
编辑JavaScript代码

实践说明
在运行过程中会提示这个文件大小超过500KB,不过不影响运行
源码下载
monaco使用demo
相关文章:

vue3使用monaco编辑器(VSCode网页版)
vue3使用monaco编辑器(VSCode网页版) 文章说明参考文章核心代码效果展示实践说明源码下载 文章说明 一直在找网页版的编辑器,网页版的VSCode功能很强大,这个monaco就是VSCode样式的编辑器,功能很强大,可以直…...

Spark优化--开发调优、资源调优、数据倾斜调优和shuffle调优等
针对Spark优化,我们可以从多个角度进行,包括开发调优、资源调优、数据倾斜调优和shuffle调优等。以下是一些具体的优化方法: 1. 开发调优 避免创建重复的RDD:对于同一份数据,只应该创建一个RDD,避免创建多…...

Day1 生信新手笔记
生信新手笔记 生信学习第一天笔记打卡。 转录组学中: 上游分析-基于linux,包括质控、过滤、比对、定量; 下游分析-基于R语言,包括差异分析、富集分析、可视化。 1. 级别标题 一个井号加空格 就是一级标题,两个井号加…...

Python的秘密基地--[章节2]Python核心数据结构
第2章:Python核心数据结构 Python中的数据结构提供了强大的工具来存储和操作数据。理解这些数据结构是Python编程的基础。 2.1 列表(List) 2.1.1 什么是列表 列表是一种有序的可变序列,用于存储一组数据。它支持多种类型的数据…...

【Electron学习笔记(三)】Electron的主进程和渲染进程
Electron的主进程和渲染进程 Electron的主进程和渲染进程前言正文1、主进程2、渲染进程3、Preload 脚本3.1 在项目目录下创建 preload.js 文件3.2 在 main.js 文件下创建路径变量并将 preload.js 定义为桥梁3.3 在 preload.js 文件下使用 electron 提供的contextBridge 模块3.4…...
[免费]SpringBoot+Vue景区订票(购票)系统【论文+源码+SQL脚本】
大家好,我是java1234_小锋老师,看到一个不错的SpringBootVue大景区订票(购票)系统,分享下哈。 项目视频演示 【免费】SpringBootVue景区订票(购票)系统 Java毕业设计_哔哩哔哩_bilibili 项目介绍 现代经济快节奏发展以及不断完善升级的信息…...

idea_工程与模块管理
module相关操作 项目结构新建module移除模块删除模块导入模块 项目结构 层级关系 project(工程) - module(模块) - package(包) - class(类) 在 IntelliJ IDEA 中Project是最顶级的结构单元 ,然后就是Module。目前,主流的大型项目结构基本都是多Module…...

A02、Java 设计模式优化
1、单例模式 1.1、什么是单例模式 它的核心在于,单例模式可以保证一个类仅创建一个实例,并提供一个访问它的全局访问点。该模式有三个基本要点:一是这个类只能有一个实例;二是它必须自行创建这个实例;三是它必须自行向…...
)
jdk8没有Buffer.put()
在Java中,Buffer是一个抽象类,它定义了缓冲区的通用行为。不过,Buffer本身并没有直接提供put()方法。put()方法是在Buffer的子类中定义的,比如ByteBuffer、CharBuffer、ShortBuffer、IntBuffer、LongBuffer、FloatBuffer和DoubleB…...

Artec Leo:航海设备维护的便携式3D扫描利器【沪敖3D】
挑战:海军服务提供商USP Maritime需要CAD数据来执行维修和改装任务,特别是在偏远地区的任务,以及原始设计丢失的情况下。 解决方案:Artec Leo, Artec Studio, Autodesk Inventor 效果:高精度船舶组件和船坞机械模型&…...

HCIA笔记6--路由基础
0. 概念 自治系统:一个统一管理的大型网络,由路由器组成的集合。 路由器隔离广播域,交换机隔离冲突域。 1.路由器工作原理 路由器根据路由表进行转发数据包; 路由表中没有路由,直接丢弃该数据包路由表中只有一条路…...

说说Elasticsearch拼写纠错是如何实现的?
大家好,我是锋哥。今天分享关于【说说Elasticsearch拼写纠错是如何实现的?】面试题。希望对大家有帮助; 说说Elasticsearch拼写纠错是如何实现的? 1000道 互联网大厂Java工程师 精选面试题-Java资源分享网 在 Elasticsearch 中&…...

Ubuntu20.04运行R-VIO2
目录 1.环境配置2.构建项目3. 运行 VIO 模式4.结果图 1.环境配置 CMakeLists.txt中 C 使用 14、opencv使用4 2.构建项目 克隆代码库: 在终端中执行以下命令克隆项目:git clone https://github.com/rpng/R-VIO2.git编译项目: 使用 catkin_m…...

【软件项目测试文档大全】软件测试方案,验收测试计划,验收测试报告,测试用例,集成测试,测试规程和指南,等保测试(Word原件)
1. 引言 1.1. 编写目的 1.2. 项目背景 1.3. 读者对象 1.4. 参考资料 1.5. 术语与缩略语 2. 测试策略 2.1. 测试完成标准 2.2. 测试类型 2.2.1. 功能测试 2.2.2. 性能测试 2.2.3. 安全性与访问控制测试 2.3. 测试工具 3. 测试技术 4. 测试资源 4.1. 人员安排 4.…...
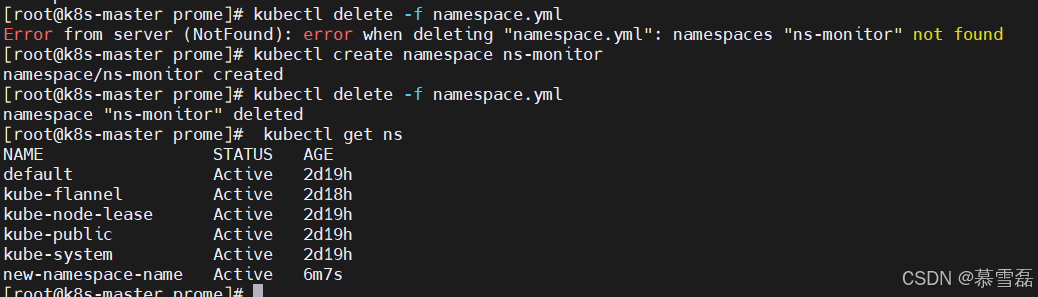
Kubernetes集群操作
查看集群信息: kubectl get nodes 删除节点 (⽆效且显示的也可以删除) 后期如果 要删除某个节点,为了不增加其他节点的访问压力,先增加一个节点,再删除要删除的节点 语法 :kubect delete…...

分布式事务调研
目录 需求背景: 本地事务 分布式基本理论 1、CAP 定理 2、BASE理论 分布式事务方案 #2PC #1. 运行过程 #1.1 准备阶段 #1.2 提交阶段 #2. 存在的问题 #2.1 同步阻塞 #2.2 单点问题 #2.3 数据不一致 #2.4 太过保守 3PC #本地消息表 TCC TCC原理 …...

Webpack 的构建流程
Webpack 的构建流程可以概括为以下几个步骤: 1. 初始化: Webpack 读取配置文件(webpack.config.js),合并默认配置和命令行参数,初始化Compiler对象。 2. 构建依赖图: 从入口文件开始递归地分…...

Cesium 当前位置矩阵的获取
Cesium 位置矩阵的获取 在 3D 图形和地理信息系统(GIS)中,位置矩阵是将地理坐标(如经纬度)转换为世界坐标系的一种重要工具。Cesium 是一个强大的开源 JavaScript 库,用于创建 3D 地球和地图应用。在 Cesi…...

ubuntu24.04 python环境
ubuntu24.04 python环境 0.引言1.使用整理 0.引言 新系统安装依赖库时报错: pip3installrequirements.txterror:externally−managed−environmentThisenvironmentisexternallymanaged╰–>ToinstallPythonpackagessystem−wide,tryaptinstallpython3−xyz,whe…...

YOLO系列论文综述(从YOLOv1到YOLOv11)【第9篇:YOLOv7——跨尺度特征融合】
YOLOv7 1 摘要2 网络架构3 改进点4 和YOLOv4及YOLOR的对比 YOLO系列博文: 【第1篇:概述物体检测算法发展史、YOLO应用领域、评价指标和NMS】【第2篇:YOLO系列论文、代码和主要优缺点汇总】【第3篇:YOLOv1——YOLO的开山之作】【第…...

终极跨平台音频下载解决方案:喜马拉雅FM批量下载器完整指南
终极跨平台音频下载解决方案:喜马拉雅FM批量下载器完整指南 【免费下载链接】xmly-downloader-qt5 喜马拉雅FM专辑下载器. 支持VIP与付费专辑. 使用GoQt5编写(Not Qt Binding). 项目地址: https://gitcode.com/gh_mirrors/xm/xmly-downloader-qt5 你是否经常…...

ClawX:OpenClaw AI智能体桌面门户,图形化编排与自动化实战
1. 项目概述:ClawX,为OpenClaw AI智能体打造的桌面门户如果你和我一样,对AI智能体(AI Agent)的潜力感到兴奋,却又对在终端里敲打复杂的命令行、配置繁琐的YAML文件感到头疼,那么ClawX的出现&…...

专业指南:如何用Legacy-iOS-Kit一站式管理老旧苹果设备
专业指南:如何用Legacy-iOS-Kit一站式管理老旧苹果设备 【免费下载链接】Legacy-iOS-Kit An all-in-one tool to restore/downgrade, save SHSH blobs, jailbreak legacy iOS devices, and more 项目地址: https://gitcode.com/gh_mirrors/le/Legacy-iOS-Kit …...

房地产行业 Zoom 钓鱼攻击机理与防御体系研究
摘要 2026 年 5 月,美国加利福尼亚房地产协会(C.A.R.)发布预警,针对房产中介的新型 Zoom 钓鱼诈骗呈高发态势。攻击者依托房产门户网站房源信息,伪装成意向购房者发起虚假咨询,以沟通房源细节为由诱导中介点…...

基于 Harmony6.0 的优惠聚合应用实战:Flutter 页面构建与高质感 UI 设计解析
基于 Harmony6.0 的优惠聚合应用实战:Flutter 页面构建与高质感 UI 设计解析 前言 随着 HarmonyOS NEXT 与 Harmony6.0 生态逐渐成熟,越来越多开发者开始关注鸿蒙平台上的跨端开发方案。相比传统 Android 应用开发,Harmony6.0 更强调分布式能…...

Docker Maven Plugin 最佳实践:企业级Docker化部署的完整解决方案 [特殊字符]
Docker Maven Plugin 最佳实践:企业级Docker化部署的完整解决方案 🚀 【免费下载链接】docker-maven-plugin Maven plugin for running and creating Docker images 项目地址: https://gitcode.com/gh_mirrors/doc/docker-maven-plugin 想要快速实…...

CANN/ops-nn快速层归一化算子
aclnnFastLayerNorm 【免费下载链接】ops-nn 本项目是CANN提供的神经网络类计算算子库,实现网络在NPU上加速计算。 项目地址: https://gitcode.com/cann/ops-nn 📄 查看源码 产品支持情况 产品是否支持Ascend 950PR/Ascend 950DTAtlas A3 训练系…...

Yeti性能优化技巧:10个方法提升威胁情报处理效率
Yeti性能优化技巧:10个方法提升威胁情报处理效率 【免费下载链接】yeti Your Everyday Threat Intelligence 项目地址: https://gitcode.com/gh_mirrors/ye/yeti Yeti是一个强大的威胁情报平台,专门为网络安全团队设计,旨在连接CTI&am…...

基于Taotoken多模型能力为智能客服场景选型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 基于Taotoken多模型能力为智能客服场景选型 构建一个高效、经济的智能客服系统,核心挑战之一在于模型选型。不同的模型…...

轻量级Web代理moltron:架构解析与生产级部署实战
1. 项目概述:一个轻量级、高性能的Web代理工具在开发和运维的日常工作中,我们经常需要处理不同网络环境下的服务访问问题。比如,本地开发需要调试一个部署在内网测试环境的API,或者需要安全地访问某些仅限特定网络访问的资源。传统…...