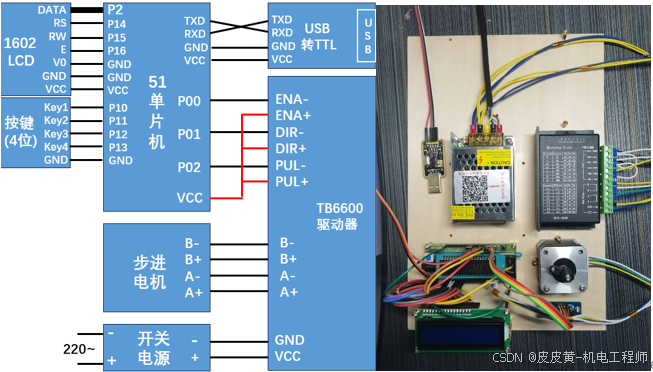
第三节、电机定速转动【51单片机-TB6600驱动器-步进电机教程】
摘要:本节介绍用定时器定时的方式,精准控制脉冲时间,从而控制步进电机速度
一、计算过程
1.1 电机每一步的角速度等于走这一步所花费的时间,走一步角度等于步距角,走一步的时间等于一个脉冲的时间
w = s t e p t … … ① w=\frac{step}{t} ……① w=tstep……①
w:角速度(°/s)
step:步距角(°)
t:脉冲时间(s)
1.2 TB6600及其他驱动器大多具有细分功能,考虑细分X之后,一个脉冲转动的角度为step/X,带入①式:
w = s t e p t ∗ X … … ② w=\frac{step}{t*X} ……② w=t∗Xstep……②
X:驱动器细分(X=1,2,4,8,16,32……)
1.3 电机速度通常使用单位为转速RPM(转/分),角速度(°/S)与转速之间的转换关系:
w = 6 ∗ n … … ③ w=6*n ……③ w=6∗n……③
t = s t e p 6 ∗ n ∗ X … … ④ t=\frac{step}{6*n*X} ……④ t=6∗n∗Xstep……④
n:转速(RPM)
至此得到了步进电机一个脉冲的时间t
1.4 采用51单片机16位溢出定时器的模式去定时,可以得到:
C = 65536 − t ∗ X t a l 12 … … ⑤ C=65536-t*\frac{Xtal}{12} ……⑤ C=65536−t∗12Xtal……⑤
C:16位溢出定时器初值
Xtal:晶振频率
1.5 将④带入⑤可得:
C = 65536 − s t e p ∗ X t a l 72 ∗ X ∗ n … … ⑥ C=65536-\frac{step*Xtal}{72*X*n}……⑥ C=65536−72∗X∗nstep∗Xtal……⑥
1.6 对于二相步进电机步距角为step=1.8°,带入之后可得:
C = 65536 − X t a l 40 ∗ X ∗ n … … ⑦ C=65536-\frac{Xtal}{40*X*n}……⑦ C=65536−40∗X∗nXtal……⑦
至此得到了转速n与定时初值C的函数关系
二、举例计算
步进电机使用二相四线电机,驱动器细分值设定为2,单片机晶振频率为12000000,设定转速为100RPM,带入⑦可得:
C = 65536 − 12000000 40 ∗ 2 ∗ 100 = 64036 C=65536-\frac{12000000}{40*2*100} =64036 C=65536−40∗2∗10012000000=64036
定时器0初值高8位TH0= C/256=0XFA
定时器0初值低8位TL0= C%256=0X24
三、测试
烧录hex文件后,单片机上电,电机会以100RMP速度匀速转动

四、功能扩展
扩展1
① 增加4个按键,控制电机启停、方向、速度加减
② 增加数码管,显示信息

扩展2
① 增加4个按键,控制电机启停、方向、速度加减
② 增加1602LCD,显示信息
五、总结
至此一个基本的电机定速驱动程序完成,通过调整定时时间,可以精确调整电机的转速
此种方式利用定时器精确定时能力,从而控制电机转速,是后续电机加减速运动的理论基础
五、附件
测试程序请见百度网盘
链接: https://pan.baidu.com/s/157zhD4JJLsjp0STiIE9MDQ
提取码: cj5j
↓↓↓点击下方【目录】,查看本系列全部文章
相关文章:
第三节、电机定速转动【51单片机-TB6600驱动器-步进电机教程】
摘要:本节介绍用定时器定时的方式,精准控制脉冲时间,从而控制步进电机速度 一、计算过程 1.1 电机每一步的角速度等于走这一步所花费的时间,走一步角度等于步距角,走一步的时间等于一个脉冲的时间 w s t e p t … ……...
从一个Bug谈前端响应拦截器的应用
一、问题场景 今天在开发商品管理系统时,遇到了一个有趣的问题:当添加重复的商品编号时,页面同时弹出了两条 "商品编号已存在" 错误提示: 这个问题暴露了前端错误处理机制的混乱,让我们从这个问题出发&…...

JS进阶DAY4|节点操作
嘿👋 今天我们要一起深入探索JavaScript中的DOM操作,这是前端开发中不可或缺的技能。🌟 准备好了吗?让我们一起跳进DOM的海洋,看看怎么用代码操控网页的结构吧! 目录 1. 增加节点 1.1 使用 appendChild 方…...
【Web】2023安洵杯第六届网络安全挑战赛 WP
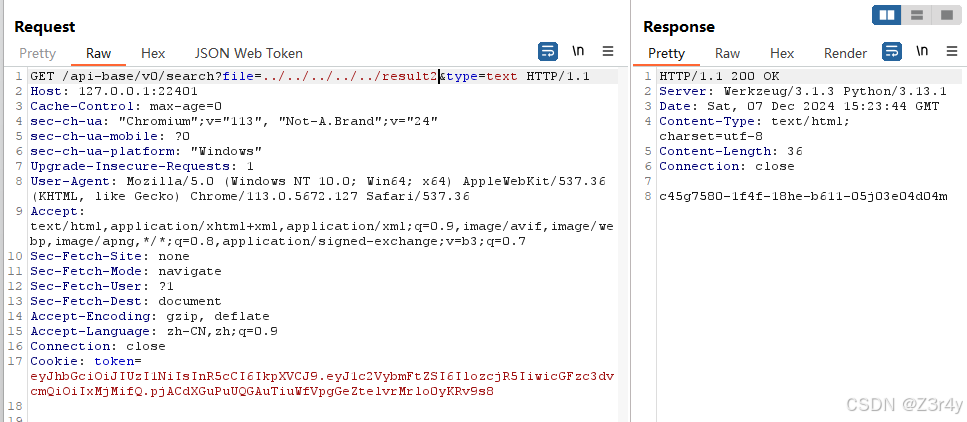
目录 Whats my name easy_unserialize signal Swagger docs 赛题链接:GitHub - D0g3-Lab/i-SOON_CTF_2023: 2023 第六届安洵杯 题目环境/源码 Whats my name 第一段正则用于匹配以 include 结尾的字符串,并且在 include 之前,可以有任…...

go 语言中协程和GMP模型
为什么需要协程? 协程用来更加精细地利用线程,支撑超高的并发的。协程,从 runtime 的角度看,协程就是一个被调度的 g 结构体。 G 就是协程,M 是线程,P 是为了优化多线程并发时,会抢夺协程队列的…...

coco数据集转换SAM2格式
coco是一个大json汇总了所有train的标签 SAM2训练一张图对应一个json标签 import json import os from pycocotools import mask as mask_utils import numpy as np import cv2def poly2mask(points, width, height):points_array np.array(points, dtypenp.int32).reshape(-…...

【CMD、PowerShell和Bash设置代理】
【CMD、PowerShell和Bash设置代理】 1. CMD(命令提示符)临时设置代理(只对当前会话有效):查看当前代理设置:清除临时代理设置:永久设置代理(对所有新的 CMD 会话有效)&am…...

22智能 代码作业集合
3-2 #include <stdio.h>int main() {int a 21;int b 10;int c ;c a b;printf("Line 1 - c 的值是 %d\n", c );c a - b;printf("Line 2 - c 的值是 %d\n", c );c a * b;printf("Line 3 - c 的值是 %d\n", c );c a / b;printf("…...

实现一个简单的后台架子(侧边栏菜单渲染,折叠,黑白主题,组件主题色,全屏,路由快捷栏)
目录 侧边栏菜单渲染 侧边栏折叠 黑白主题 全屏切换 切换组件主题色 tab快捷栏 代码 侧边栏菜单渲染 结合ElementPlus组件库进行实现 新建的Vue3项目,引入了格式化样式normalize.css和ElementPlus,并进行了全局引入 并进行了全局引入 设置高度为100% 粘贴ElementPlus的…...

vue3-canvas实现在图片上框选标记(放大,缩小,移动,删除)
双图版本(模板对比) 业务描述:模板与图片对比,只操作模板框选的位置进行色差对比,传框选坐标位置给后端,返回对比结果显示 draw.js文件: 新增了 createUuid,和求取两个数组差集的方…...

unity3d—demo(2d人物左右移动发射子弹)
目录 人物代码示例: 子弹代码示例: 总结上面代码: 注意点: 人物代码示例: using System.Collections; using System.Collections.Generic; using UnityEngine;public class PlayerTiao : MonoBehaviour {public f…...

【ETCD】【源码阅读】 深入解析 raftNode.start`函数:Raft 核心启动逻辑剖析
raftNode.start方法 是 etcd 中 Raft 模块的核心启动点,其职责是管理 Raft 状态机的状态变迁、日志处理及集群通信等逻辑。通过对源码的逐行分析,我们将全面揭示其运行机制,探讨其设计背后的分布式系统理念。 函数核心结构 raftNode.start 方…...

Robust Depth Enhancement via Polarization Prompt Fusion Tuning
paper:论文地址 code:github项目地址 今天给大家分享一篇2024CVPR上的文章,文章是用偏振做提示学习,做深度估计的。模型架构图如下 这篇博客不是讲这篇论文的内容,感兴趣的自己去看paper,主要是分享环境&…...

NEFTune,SFT训练阶段给Embedding加噪音
仿照CV里,数据增强的思路(给图像做旋转、反转、改变亮度等);NLP里,SFT训练数据较少时,也可往embedding上加噪音,来增加训练数据的丰富程度。进而提升最终训练效果。 前提假设:Embed…...

uniapp -- 实现页面滚动触底加载数据
效果 首选,是在pages.json配置开启下拉刷新 {"path": "pages/my/document/officialDocument","style": {"navigationStyle":</...
L22.【LeetCode笔记】相交链表(新版)
目录 1.题目 代码模板 2.分析 编辑 算法误区 正确方法1 但不能通过所有的测试用例 修改后 提交结果 正确方法2 节省代码的技巧 1.题目 https://leetcode.cn/problems/3u1WK4/description/ 给定两个单链表的头节点 headA 和 headB ,请找出并返回两个单…...

智能时代网络空间认知安全新观察
文章目录 前言一、历史上的四次认知革命二、人工智能革命掀起认知安全新浪潮三、人工智能技术塑造认知安全新范式四、人工智能治理应对认知安全新思考 前言 12月5日,在2024第三届北外滩网络安全论坛上以“智能时代网络空间认知安全新观察”为主题作主旨演讲&#x…...

游戏如何应对模拟器作弊
模拟器是指能在PC端模拟出安卓手机系统的软件,市面上比较常见的安卓模拟器有:雷电模拟器、MuMu模拟器、夜神模拟器等。 市面上常见的模拟器 模拟器既可以节省手机内存空间,避免长时间玩游戏手机发烫发热的尴尬,也可以用键盘鼠标对…...
是否属于特定范围)
c++ 判断一个 IP 地址(可能是 IPv6 或 IPv4)是否属于特定范围
在 C 中,判断一个 IP 地址(可能是 IPv6 或 IPv4)是否属于特定范围时,需要考虑两种不同的地址格式和它们的范围比较。IPv6 和 IPv4 地址结构完全不同,因此需要分别处理这两种地址类型。 实现思路: 识别 IP…...

计算机视觉——相机标定(Camera Calibration)
文章目录 1. 简介2. 原理3. 相机模型3.1 四大坐标系3.2 坐标系间的转换关系3.2.1 世界坐标系到相机坐标系3.2.2 相机坐标系到图像坐标系3.2.3 像素坐标系转换为图像坐标系3.2.4 世界坐标转换为像素坐标 3.3 畸变3.3.1 畸变类型3.3.1.1 径向畸变(Radial Distortion&a…...
别再死记硬背公式了!用大白话和动图拆解Transformer的注意力机制
用生活场景拆解Transformer:注意力机制就像一场高效会议 想象你正在主持一场跨国团队会议,成员们用不同语言讨论项目进展。作为主持人,你需要快速捕捉每个人的发言重点,判断谁的意见最关键,并协调不同观点之间的关系—…...

告别‘黑箱’聚合:深入解读GWCNet如何用组相关提升立体匹配效率与精度
告别‘黑箱’聚合:深入解读GWCNet如何用组相关提升立体匹配效率与精度 立体匹配一直是计算机视觉领域的核心挑战之一,尤其在自动驾驶、机器人导航等实时性要求高的场景中,如何在精度和效率之间找到平衡点成为算法设计的难点。传统方法往往陷入…...

BGP状态机详解:从邻居建立到故障排查的完整指南
1. 项目概述:从“拒绝一切”到“稳定对话”的BGP邻居建立之旅如果你在网络运维或者数据中心工作的岗位上待过一阵子,肯定对BGP(边界网关协议)又爱又恨。爱的是它作为互联网“大管家”的稳定和强大,恨的是它一旦出问题&…...

Diablo Edit2:终极暗黑破坏神2存档修改器完全指南
Diablo Edit2:终极暗黑破坏神2存档修改器完全指南 【免费下载链接】diablo_edit Diablo II Character editor. 项目地址: https://gitcode.com/gh_mirrors/di/diablo_edit Diablo Edit2是一款功能强大的开源暗黑破坏神2存档修改器,专为《暗黑破坏…...

函数依赖的核心概念解析[数据库原理]
函数依赖的定义与核心概念 函数依赖(Functional Dependency,简称FD)是关系数据库理论中用于描述属性间数据约束的核心概念。它定义了一个关系模式(Relation Schema)中,一个属性(或属性组&#…...

Newbie-Guideline数据库实战:SQL查询与ER模型设计的完整教程
Newbie-Guideline数据库实战:SQL查询与ER模型设计的完整教程 【免费下载链接】Newbie-Guideline 컴퓨터과학/공학 신입생 및 비전공자 신입을 위한 지침서 项目地址: https://gitcode.com/gh_mirrors/ne/Newbie-Guideline Newbie-Guideline是面向计算机科学/…...

Symfony String测试指南:如何编写高质量的字符串操作测试用例
Symfony String测试指南:如何编写高质量的字符串操作测试用例 【免费下载链接】string Provides an object-oriented API to strings and deals with bytes, UTF-8 code points and grapheme clusters in a unified way 项目地址: https://gitcode.com/gh_mirrors…...

新手开发者首次在Taotoken模型广场选型与试用的全过程记录
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 新手开发者首次在Taotoken模型广场选型与试用的全过程记录 作为一名刚开始接触大模型应用的开发者,我最近尝试了Taotok…...

手把手教你用UE5 C++为角色添加动态攀爬:支持移动平台与高度自适应
手把手实现UE5动态攀爬系统:移动平台与高度自适应全解析 在当代3A级动作游戏中,角色与环境的动态交互已成为沉浸感的核心要素。想象一个场景:玩家在摇晃的空中浮岛上追逐目标,需要连续攀爬移动中的平台;或是潜入敌方基…...

给你的Alienware设备一次真正的解放:轻量级控制工具完全指南
给你的Alienware设备一次真正的解放:轻量级控制工具完全指南 【免费下载链接】alienfx-tools Alienware systems lights, fans, and power control tools and apps 项目地址: https://gitcode.com/gh_mirrors/al/alienfx-tools 你是否曾经为Alienware Comman…...