【C++笔记】AVL树
前言
各位读者朋友们大家好,上期我们讲解了map和set这两大容器的使用,这一期我们讲解最早的平衡二叉搜索树——AVL树。
目录
- 前言
- 一. AVL树的概念
- 二. AVL树的实现
- 2.1 AVL树的结构
- 2.2 AVL树的插入
- 2.2.1 AVL树插入一个值的大致过程
- 2.2.2 平衡因子的更新
- 2.2.3 插入代码实现
- 2.3 旋转
- 2.3.1 旋转的原则
- 2.3.2 右单旋(单纯左子树高)
- 2.3.3 右单旋的实现
- 2.3.4 左单旋(单纯右子树高)
- 2.3.5 左单旋的实现
- 2.3.6 左右双旋(左子树的右子树高)
- 2.3.7 左右双旋的实现
- 2.3.8 右左双旋(右子树的左子树高)
- 2.3.9 右左双旋的实现
- 2.4 AVL树的查找
- 三. AVL树的全体实现
- 3.1 AVL树的平衡检测
- 结语
一. AVL树的概念
- AVL树是最先发明的自平衡二叉查找树,AVL是一棵空树,或者具备下列性质的⼆叉搜索树:它的左右子树都是AVL树,且左右子树的高度差的绝对值不超过1。AVL树是一颗高度平衡搜索二叉树,通过控制高度差去控制平衡。
- AVL树得名于它的发明者G.M.Adelson-Velsky和E.M.Landis是两个前苏联的科学家,他们在1962年的论文中发表了它。
- AVL树实现这里我们引入一个平衡因子(balance factor)的概念,每个节点都有一个平衡因子,任何节点的平衡因子等于右子树的高度减去左子树的高度,也就是说任何节点的平衡因子等于0/1/-1,AVL树并不是必须要平衡因子,但是有了平衡因子可以更方便我们去进行观察和控制树是否平衡,就像一个风向标一样。

- AVL树整体节点数量和分布和完全二叉树类似,高度可控制在logN,增删查改的效率也可以控制在O(logN),相比二叉搜索树有了本质的提升。

二. AVL树的实现
2.1 AVL树的结构
template <class K, class V>
struct AVLTreeNode
{pair<K, T> _kv;AVLTreeNode* _left;AVLTreeNode* _right;AVLTreeNode* _parent;int _bf;// 平衡因子AVLTreeNode(const pair<K,V>& kv):_kv(kv),_left(nullptr),_right(nullptr),_parent(nullptr),_bf(0){}
};
template <class K,class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:private:Node* _root = nullptr;
};
2.2 AVL树的插入
2.2.1 AVL树插入一个值的大致过程
- 按照二叉搜索树的规则插入一个值
- 新增节点以后,只会影响祖先节点的高度,也就是可能会影响部分祖先节点的平衡因子,所以更新插入节点到根路径上的平衡因子,实际中最坏的情况下要更新到根,有些情况更新到中间就可以停止了,具体情况下面再详细分析。
- 更新平衡因子过程中没有出现问题,插入结束。
- 更新平衡因子过程中出现不平衡,对不平衡子树旋转,旋转后调平衡的同时,本质降低了子树的高度,不会再影响上一层,所以插入结束。
2.2.2 平衡因子的更新
更新原则:
-
平衡因子 = 右子树高度 - 左子树高度
-
只有子树高度变化才会影响当前节点的平衡因子
-
插入节点,会增加高度,所以新增加节点在parent的右子树,parent的平衡因子++,在左子树,平衡因子–
-
parent所在子树的高度是否变化决定了是否向上继续更新
更新停止条件: -
更新后parent的平衡因子等于0,更新中parent的平衡因子的变化为1到0或者-1到0,说明更新前parent的子树一边高一边低,新插入的节点在低的一侧,插入后parent所在子树的高度不变,不会影响parent父亲节点的平衡因子,更新结束。

这种情况下就相当于将parent子树补齐 -
更新后parent的平衡因子等于1或者-1,更新前,更新中parent的平衡因子的变化为0到1或者0到-1,说明更新前parent的左右子树同高,新增的插入节点后,parent所在子树一边高一边低,parent所在子树的符合平衡要求,但是高度增加了1,会影响parent的平衡因子,所以要继续向上调整。当更新到根节点的时候结束更新

-
更新后parent的平衡因子等于2或者-2,parent的平衡因子的变化为1到2或者-1到-2,说明更新前子树一边高一边低,然后新插入的节点在高的那边,parent所在子树高的那边更高了,破坏了平衡,parent所在的子树不符合平衡要求,需要旋转处理。旋转的目标有两个:1、把parent的子树旋转平衡。 2、降低parent子树的高度,恢复到插入节点之前的高度。所以旋转之后也不需要向上更新,插入结束。

2.2.3 插入代码实现
bool Insert(const pair<K, V>& kv)
{if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}// 链接父亲cur->_parent = parent;// 更新平衡因子while (parent){if (cur == parent->_right)// 插入右边平衡因子++++parent->_bf;else--parent->_bf; // 左边--if (parent->_bf == 0){break;}else if (parent->_bf == 1 || parent->_bf == -1) // 继续向上更新{cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){// 旋转}elseassert(false);}return true;
}
插入前面的逻辑根二叉搜索树插入的逻辑一样,只是插入完节点之后,更新了平衡因子,并调整树的平衡。
2.3 旋转
2.3.1 旋转的原则
- 保持搜索树的规则
- 让旋转的树从不平衡变得平衡,其次降低树的高度
旋转一共有四种:左单旋/右单旋/左右双旋/右左双旋
2.3.2 右单旋(单纯左子树高)

旋转核心步骤,因为5 < b子树的值 < 10,将b变成10的左子树,10变成5的右子树,5变成这棵树新的根,符合搜索树的规则,控制了平衡,同时这棵树的高度恢复到了插入之前的h+2,符合旋转原则。如果插入之前10整棵树的⼀个局部子树,旋转后不会再影响上一层,插入结束了。
上图中是抽象图,有a/b/c抽象为三棵高度为h的子树(h>=0),a/b/c均符合AVL树的要
求。10可能是整棵树的根,也可能是⼀个整棵树中局部的子树的根。这里a/b/c是高度为h的子树,上图适用于所有的右单旋情况,下面我们展开几种情况来看一下:
- 插入前a/b/c/的高度为0

- 插入前a/b/c/的高度为1

- 插入前a/b/c/的高度为2


a必须是x,否则就不能在10节点旋转了(可能在5的左孩子节点旋转,也可能不会旋转) - 插入前a/b/c/的高度为3


只有a是4个节点或者三个节点插入到两个节点上才会旋转。
2.3.3 右单旋的实现
subL当根节点,parent当subL的右子树,subLR当parent的右子树,也要注意所有的parent的处理,每个节点要将对应的父亲节点调整好
void RotateR(Node* parent)
{// subL当根节点,parent当subL的右子树,subLR当parent的右子树,注意所有的parent的处理Node* subL = parent->_left;Node* subLR = subL->_right;subL->_right = parent;parent->_left = subLR;// 从下往上链接父节点if (subLR)// subL可能为空,为空就不需要处理父亲节点subLR->_parent = parent;Node* pParent = parent->_parent;// 父节点的父亲,便于后续链接parent->_parent = subL;if (parent == _root)// 如果调整的是整棵树的根{_root = subL;subL->_parent = nullptr;}else// 局部树,链接祖先{if (parent == pParent->_left)pParent->_left = subL;elsepParent->_right = subL;subL->_parent = pParent;}// 更新平衡因子subL->_bf = parent->_bf = 0;
}
2.3.4 左单旋(单纯右子树高)

- a/b/c抽象为三棵高度为h的子树(h>=0),a/b/c均符合AVL树的要求。10可能是整棵树的根,也可能是一整棵树中局部的子树的根。这里a/b/c是高度为h的子树,是一种概括抽象表示,他代表了所有左单旋的场景,实际左单旋形态有很多种,和右单旋很类似。
- 在a子树中插入一个新节点,导致a子树的高度从h变成h+1,不断向上更新平衡因子,导致10的平衡因子从1变成2,10为根的树左右高度差超过1,违反平衡规则。10为根的树右边太高了,需要往左边旋转,控制两棵树的平衡。
- 旋转核心步骤,因为10 < b子树的值 < 15,将b变成10的右子树,10变成15的左子树,15变成这棵树新的根,符合搜索树的规则,控制了平衡,同时这棵的高度恢复到了插入之前的h+2,符合旋转原则。如果插入之前10整棵树的一个局部子树,旋转后不会再影响上一层,插入结束了。
2.3.5 左单旋的实现
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;subR->_left = parnet;// 从下往上链接父节点if (subRL)subRL->_parent = parent;Node* pParent = parent->_parent;parent->_parent = subR;if (parent == _root)// 调整的是整棵树的根{_root = subR;subR->_parent = nullptr;}else{if (parent == pParent->_left)pParent->_left = subR;elsepParent->_right = subR;subR->_parent = pParent;}subR->_bf = parent->_bf = 0;
}
2.3.6 左右双旋(左子树的右子树高)
我们先通过具体图来分析:
- 情况1、a/b/c子树的高度为0

- 情况2、a/b/c子树的高度h==1,在b树的右边插入节点

- 情况3、a/b/c子树的高度h==1,在b树的左边插入节点

2.3.7 左右双旋的实现
void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;// 记录其平衡因子,看新节点是插入在左还是在右RotateL(subL);// 先左旋RotateR(parent);// 再右旋// 更新平衡因子if (bf == 1)// 在右侧插入的节点{parent->_bf = 0;subL->_bf = -1;subLR->_bf = 0;}else if (bf == -1)// 左侧{parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;}else if (bf == 0)// 树为空直接插入{parent->_bf = 0;subL->_bf = 0;subLR->_bf = 0;}elseassert(false);
}
2.3.8 右左双旋(右子树的左子树高)

这里和左右双旋一样,也是有三种情况
2.3.9 右左双旋的实现
void RotateRL(Node * parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf; // 记录其平衡因子,看新节点是插入在左还是在右// 先右旋RotateR(subR);// 左旋RotateL(parent);if (bf == -1)// 左边插入 {parent->_bf = 0;subR->_bf = 1;subRL->_bf = 0;}else if (bf == 1){parent->_bf = -1;subR->_bf = 0;subRL->_bf = 0;}else if (bf == 0){parent->_bf = 0;subR->_bf = 0;subRL->_bf = 0;}elseassert(false);
}
2.4 AVL树的查找
和二叉树搜索树的逻辑一样,只是效率提升到O(logN)
Node* Find(const K& key)
{Node* cur = _root;while (cur){if (key > cur->_kv.first)// 大的往右走cur = cur->_right;else if (key < cur->_kv.first)// 小的往左走cur = cur->_left;elsereturn cur;}return nullptr;
}
三. AVL树的全体实现
AVL树的实现代码
3.1 AVL树的平衡检测
我们可以检查AVL树的高度差,如果高度差>=2,就说明不是AVL树
bool _IsBalanceTree(Node * root){if (root == nullptr)return true;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);int diff = rightHeight - leftHeight;if (abs(diff) >= 2){cout << root->_kv.first << "高度差异常,不是AVL树!!!" << endl;return false;}if (diff != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return _IsBalanceTree(root->_left) && _IsBalanceTree(root->_right);}
测试代码
void TestAVLTree2()
{const int N = 100000;vector<int> v;v.reserve(N);srand(time(0));for (size_t i = 0; i < N; i++){v.push_back(rand() + i);}size_t begin2 = clock();AVLTree<int, int> t;for (auto e : v){t.Insert(make_pair(e, e));}size_t end2 = clock();cout << "Insert:" << end2 - begin2 << endl;if (t.IsBalanceTree())cout << "AVL" << endl;cout << "Height:" << t.Height() << endl;cout << "Size:" << t.Size() << endl;size_t begin1 = clock();for (size_t i = 0; i < N; i++){t.Find((rand() + i));}size_t end1 = clock();cout << "Find:" << end1 - begin1 << endl;
}int main()
{TestAVLTree2();return 0;
}
结语
以上我们就讲完了AVL树的实现,这部分需要好好消化,感谢大家的阅读!欢迎大家批评指正!
相关文章:
【C++笔记】AVL树
前言 各位读者朋友们大家好,上期我们讲解了map和set这两大容器的使用,这一期我们讲解最早的平衡二叉搜索树——AVL树。 目录 前言一. AVL树的概念二. AVL树的实现2.1 AVL树的结构2.2 AVL树的插入2.2.1 AVL树插入一个值的大致过程2.2.2 平衡因子的更新2…...

【竞技宝】LOL:JDG官宣yagao离队
北京时间2024年12月13日,在英雄联盟S14全球总决赛结束之后,各大赛区都已经进入了休赛期,目前休赛期也快进入尾声,LPL大部分队伍都开始陆续官宣转会期的动向,其中JDG就在近期正式官宣中单选手yagao离队,而后者大概率将直接选择退役。 近日,JDG战队在官方微博上连续发布阵容变动消…...

双目摄像头标定方法
打开matlab 找到这个标定 将双目左右目拍的图像上传(左右目最好不少于20张) 等待即可 此时已经完成标定,左下角为反投影误差,右边为外参可视化 把这些误差大的删除即可。 点击导出 此时回到主页面,即可看到成功导出 Ca…...

相差不超过k的最多数,最长公共子序列(一),排序子序列,体操队形,青蛙过河
相差不超过k的最多数 链接:相差不超过k的最多数 来源:牛客网 题目描述: 给定一个数组,选择一些数,要求选择的数中任意两数差的绝对值不超过 𝑘 。问最多能选择多少个数? 输入描述: 第一行输入两个正整…...
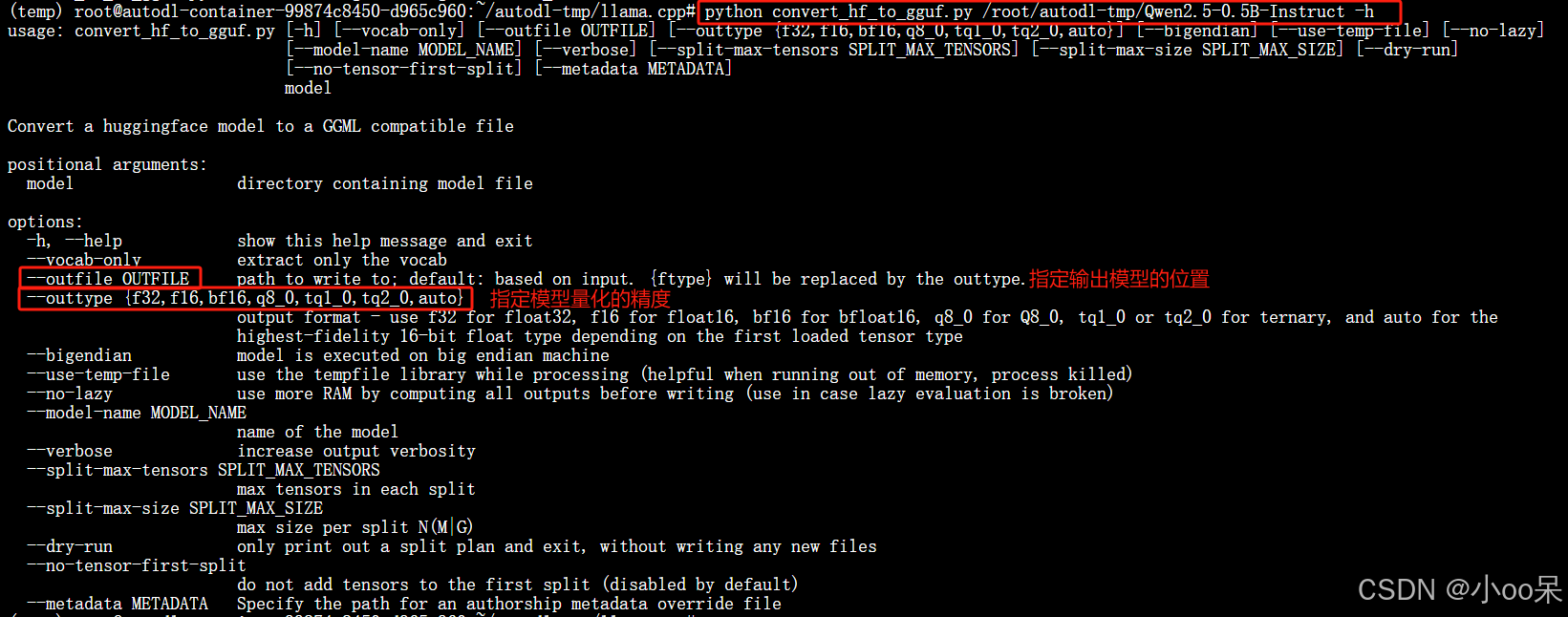
【自然语言处理与大模型】使用llama.cpp将HF格式大模型转换为GGUF格式
llama.cpp的主要目标是在本地和云端的各种硬件上以最小的设置和最先进的性能实现LLM推理。是一个专为大型语言模型(LLM)设计的高性能推理框架,完全使用C和C编写,没有外部依赖,这使得它可以很容易地被移植到不同的操作系…...

MongoDB存储照片和文件存储照片的区别在那里?
一、维度对比 比较维度MongoDB存储照片文件系统存储照片数据模型使用文档存储数据,可以存储不同结构的照片。以文件的形式存储照片,每个文件独立存在。性能高效的数据检索,适用于大规模应用程序中的高效检索和访问。但在处理大量高分辨率图片…...

协变量的概念
协变量的概念 协变量的概念 协变量(Covariate)是在统计分析和研究中,与因变量(被研究的主要变量)相关,并且可能对因变量产生影响的其他变量。它不是研究的主要关注对象,但需要在分析过程中被考虑进去,因为它可能会混淆或改变自变量与因变量之间的关系。举例说明 教育研…...

【[LeetCode每日一题】Leetcode 1768.交替合并字符串
Leetcode 1768.交替合并字符串 题目描述: 给定两个字符串 word1 和 word2,以交替的方式将它们合并成一个新的字符串。即,第一个字符来自 word1,第二个字符来自 word2,第三个字符来自 word1,依此类推。如果…...

SRT协议学习
SRT(Secure Reliable Transport)协议是一种开源的视频传输协议,旨在提供安全,可靠,低延迟的视频流传输。以下是SRT协议的一些关键的工作原理。 1 安全传输,SRT通过使用AES加密和数据完整性验证来确保数据的安全传输。它可以在不信…...

南昌大学《2024年837自动控制原理真题》 (完整版)
本文内容,全部选自自动化考研联盟的:《南昌大学873自控考研资料》的真题篇。后续会持续更新更多学校,更多年份的真题,记得关注哦~ 目录 2024年真题 Part1:2024年完整版真题 2024年真题...

ASP.NET Core 应用程序的启动与配置:Program.cs 文件的全面解析
ASP.NET Core 应用程序的启动与配置:Program.cs 文件的全面解析 Program.cs 是 ASP.NET Core 应用程序的入口点,负责应用程序的启动和配置。以下是 Program.cs 文件中完成的主要工作,按逻辑步骤进行总结: 1. 创建和配置主机环境…...

2020-12-02 数字过滤
缘由 C语言 数组:数字过滤-CSDN问答 void chuli(int n15236) {int aa[47]{0},j0,m0;while(n)aa[j]n%10,n/10;while(j)if(aa[--j]%2)m*10,maa[j];cout << m << ends; } void 数字过滤(int n 15236) {int aa[47]{0}, j 0, m 0;while (…...
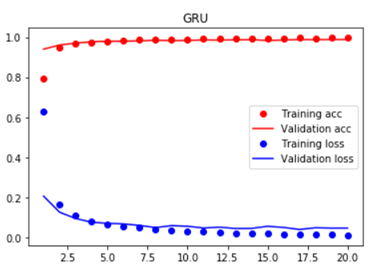
长短期记忆神经网络(LSTM)介绍
1、应用现状 长短期记忆神经网络(LSTM)是一种特殊的循环神经网络(RNN)。原始的RNN在训练中,随着训练时间的加长以及网络层数的增多,很容易出现梯度爆炸或者梯度消失的问题,导致无法处理较长序列数据,从而无…...

数据结构 ——二叉树转广义表
数据结构 ——二叉树转广义表 1、树转广义表 如下一棵树,转换为广义表 root(c(a()(b()()))(e(d()())(f()(j(h()())())))) (根(左子树)(右子树)) 代码实现 #include<stdio.h> #include<stdlib.h>//保存…...

chattts生成的音频与字幕修改完善,每段字幕对应不同颜色的视频,准备下一步插入视频。
上一节中,实现了先生成一个固定背景的与音频长度一致的视频,然后插入字幕。再合并成一个视频的方法。 但是:这样有点单了,所以: 1.根据字幕的长度先生成视频片断 2.在片段上加上字幕。 3.合并所有片断,…...

数据结构开始——时间复杂度和空间复杂度知识点笔记总结
好了,经过了漫长的时间学习c语言语法知识,现在我们到了数据结构的学习。 首先,我们得思考一下 什么是数据结构? 数据结构(Data Structure)是计算机存储、组织数据的方式,指相互之间存在一种或多种特定关系的数据元素…...

路由策略与策略路由
路由策略 常用有Router-Policy,Filter-Policy等 控制路由是否可达,通过修改路由条目相关参数影响流量的转发 基于控制平面,会影响路由表表项,但只能基于目地址进行策略判定,于路由协议相结合使用 Router-Policy …...

pytorch_fid 安装笔记
目录 torch安装: pytorch_fid安装 torch安装: pip install torch2.5.0 --index-url https://download.pytorch.org/whl/cu121 pytorch_fid安装 pip install pytorch_fid 安装后,torch也会自动安装,导致torch引用报错。...

Qt绘制仪表————附带详细说明和代码示例
文章目录 1 效果2 原理3 编码实践3.1 创建仪表属性类3.2 设置类属性3.3 绘制图案3.3.1 设置反走样3.3.2 绘制背景3.3.3 重新定义坐标原点3.3.4 绘制圆环3.3.5 绘制刻度线3.3.6 绘制刻度线上的描述值3.3.7 绘制指针3.3.8 绘制指针数值和单位3.3.9 控制指针变化 扩展福利参考 1 效…...

百度地图JavaScript API核心功能指引
百度地图JavaScript API是一套由JavaScript语言编写的应用程序接口,它能够帮助您在网站中构建功能丰富、交互性强的地图应用,包含了构建地图基本功能的各种接口,提供了诸如本地搜索、路线规划等数据服务。百度地图JavaScript API支持HTTP和HT…...

Kubernetes DaemonSet深度解析:管理集群守护进程的最佳实践
Kubernetes DaemonSet深度解析:管理集群守护进程的最佳实践 一、DaemonSet概述 DaemonSet 是Kubernetes中用于在集群的每个节点上运行一个Pod副本的控制器。它确保所有节点(或满足特定条件的节点)都运行该Pod的一个实例。 1.1 DaemonSet应…...

AI正在重构工程师岗位:被替代的不是“人”,而是低维度能力
过去很多人认为,AI更适合写文案、做客服、生成图片,而真正复杂的工程领域——尤其是工业、制造、自动化系统——依然离不开工程师。 但最近一个劳动仲裁案例,让越来越多工程技术人员开始重新思考这个问题: 一位从事测绘工作15年的工程师,因为企业全面导入AI自动化测绘系…...

面试官问我SQL怎么调优,我直接甩出这套Explain对比法
面试官问我SQL怎么调优,我直接甩出这套Explain对比法 线上系统突然变慢,用户投诉纷至沓来,运维群里消息炸了锅。排查半天,发现罪魁祸首竟然是一条不起眼的SQL语句。这条SQL在测试环境跑得飞快,一到生产环境就像老牛拉破车。相信很多开发者都遇到过这种场景——SQL写的时候…...

Deepseek-V4-Flash-20260423 深度评测与实战指南
文章目录 ① 核心参数解析与架构初印象② 多轮对话响应速度与并发实测③ 复杂逻辑推理与代码生成质量解剖④ 长文本处理与关键信息提取案例⑤ 垂直领域知识准确性验证集锦⑥ 模型幻觉识别与能力边界测试⑦ 极端输入下的稳定性与避坑指南⑧ 不同场景下的性价比与选型建议 在开发…...
 )
Navicat Premium16 免费安装配置教程(附安装包)
一、下载安装包 官网下载:https://www.navicat.com.cn/products#navicat 可直接网盘下载 链接:https://pan.baidu.com/s/1t3Tx0c8gEaMEifGow_05aQ?pwd8888 二、安装过程 1. 双击安装包 2. 选中“我同意”,点击“下一步”。 3.…...

如何构建现代自托管音乐播放器:音乐爱好者的完整使用指南
如何构建现代自托管音乐播放器:音乐爱好者的完整使用指南 【免费下载链接】feishin A modern self-hosted music player. 项目地址: https://gitcode.com/gh_mirrors/fe/feishin 在数字音乐时代,音乐爱好者面临着数据隐私、平台依赖和个性化体验的…...
)
不止于安装:在Ubuntu上为Arduino IDE 2.x手动添加冷门芯片支持(以LGT8F328P为例)
不止于安装:在Ubuntu上为Arduino IDE 2.x手动添加冷门芯片支持(以LGT8F328P为例) 当你在Ubuntu上完成Arduino IDE 2.x的基础安装后,真正的挑战才刚刚开始。对于那些非官方支持的开发板,如LGT8F328P,标准的库…...

【企业级AI Agent安全合规红线】:GDPR+等保2.0双标穿透测试报告首次公开,含6类Agent数据泄露路径图谱
更多请点击: https://codechina.net 第一章:【企业级AI Agent安全合规红线】:GDPR等保2.0双标穿透测试报告首次公开,含6类Agent数据泄露路径图谱 在企业级AI Agent规模化落地过程中,合规性已不再是“附加项”…...

开发AI应用时利用Taotoken实现多模型聚合与路由策略
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 开发AI应用时利用Taotoken实现多模型聚合与路由策略 应用场景类,面向正在构建复杂AI应用的架构师或开发者,…...

为什么92%的OTA试水AI Agent后6个月内放弃?——头部旅行社CTO亲述3大技术断层
更多请点击: https://kaifayun.com 第一章:为什么92%的OTA试水AI Agent后6个月内放弃?——头部旅行社CTO亲述3大技术断层 在2023–2024年OTA行业AI落地调研中,某第三方机构追踪了137家上线AI Agent原型系统的在线旅游企业&#…...