基于PWLCM混沌映射的麋鹿群优化算法(Elk herd optimizer,EHO)的多无人机协同路径规划,MATLAB代码
一、麋鹿群优化算法EHO
- 基本概念
- 麋鹿群优化算法(EHO,Elephant Herding Optimization)是2024年提出的一种启发式优化算法,它的灵感来自麋鹿群的繁殖过程。麋鹿有两个主要的繁殖季节:发情和产犊。在发情季节,麋鹿群分裂成不同规模的不同家庭。这种划分是基于公麋鹿间争夺主导地位的,其中更强壮的公麋鹿可以组成一个拥有大量的家庭。在产犊季节,每个家庭都会从公麋鹿和雌麋鹿中培育出新的小牛。这个灵感是在优化环境中设置的,其中优化循环由三个运算符组成:发情季节、产犊季节和选择季节。在选拔季节,所有家庭都被合并,包括公麋鹿、雌麋鹿和小麋鹿。最健康的麋鹿群将被选中,用于即将到来的发情和产犊季节。简而言之,EHO 将种群分为一组,每组在发情季节有一名领导者和几名追随者。追随者的数量是根据其领导组的健身值确定的。每个小组都将根据其领导者和追随者在产犊季节生成新的解决方案。所有组的成员(包括领导者、追随者和新解决方案)被组合在一起,并在选择季节选择最适者群体。


- 算法步骤
- 初始化:
- 确定麋鹿群的规模N、子群数量k、搜索空间的范围(例如变量的上下界)等参数。
- 随机初始化麋鹿群中每个个体的位置(在搜索空间内),并计算每个个体对应的适应度值(用于评估解的优劣程度)。
- 分群操作:
- 根据设定的规则将麋鹿群划分为k个子群,并确定每个子群的领导者。
- 迭代更新:
- 对于每个子群的领导者,根据领导者更新机制更新其位置。
- 子群中的其他个体根据个体位置更新公式更新自己的位置。
- 计算更新后每个个体的适应度值。
- 记录全局最优位置和最优适应度值(如果发现更优的解则进行更新)。
- 终止条件判断:
- 检查是否满足终止条件,如达到最大迭代次数或者最优解的变化小于某个阈值等。如果满足,则输出全局最优解;否则,返回迭代更新步骤继续执行。

- 检查是否满足终止条件,如达到最大迭代次数或者最优解的变化小于某个阈值等。如果满足,则输出全局最优解;否则,返回迭代更新步骤继续执行。
- 初始化:
参考文献:
[1] Al-betar, M.A., Awadallah, M.A., Braik, M.S., Makhadmeh, S.N., & Abu Doush, I. (2024). Elk herd optimizer: a novel nature-inspired metaheuristic algorithm. Artif. Intell. Rev., 57, 48.
二、无人机(UAV)三维路径规划
单个无人机三维路径规划数学模型参考如下文献:
Phung M D , Ha Q P . Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization[J]. arXiv e-prints, 2021.
每个无人机的目标函数由路径长度成本,安全性与可行性成本、飞行高度成本和路径平滑成本共同组成:
2.1路径长度成本
路径长度成本由相邻两个节点之间的欧氏距离和构成,其计算公式如下:

2.2路径安全性与可行性成本

路径安全性与可行性成本通过下式计算:

2.3路径飞行高度成本

飞行高度成本通过如下公式计算所得:


2.4路径平滑成本

投影向量通过如下公式计算:

转弯角度的计算公式为:

爬坡角度的计算公式为:

平滑成本的计算公式为:

2.5总成本(目标函数)

总成本由最优路径成本,安全性与可行性成本、飞行高度成本和路径平滑成本的线性加权所得。其中,b为加权系数。
三、实验结果
在三维无人机路径规划中,无人机的路径由起点,终点以及起始点间的点共同连接而成。因此,自变量为无人机起始点间的各点坐标,每个无人机的目标函数为总成本(公式9)。本文研究3个无人机协同路径规划,总的目标函数为3个无人机的总成本之和。
Xmin=[Xmin0,Xmin1,Xmin2];
Xmax=[Xmax0,Xmax1,Xmax2];
dim=dim0+dim1+dim2;
fobj=@(x)GetFun(x,fobj0,fobj1,fobj2);%总的目标函数
pop=50;
maxgen=1500;[fMin ,bestX,Convergence_curve]=eho(pop,maxgen,Xmin,Xmax,dim,fobj);%Trajectories,fitness_history, population_history
% save bestX bestX
BestPosition1 = SphericalToCart(bestX(1:dim/3),model);% 第一个无人机得到的路径坐标位置
BestPosition2 = SphericalToCart(bestX(1+dim/3:2*dim/3),model1);% 第二个无人机得到的路径坐标位置
BestPosition3 = SphericalToCart(bestX(1+2*dim/3:end),model2);% 第三个无人机得到的路径坐标位置gca1=figure(1);
gca2=figure(2);
gca3=figure(3);
PlotSolution(BestPosition1,model,gca1,gca2,gca3);% 画第一个无人机
PlotSolution1(BestPosition2,model1,gca1,gca2,gca3);% 画第二个无人机
PlotSolution2(BestPosition3,model2,gca1,gca2,gca3);% 画第三个无人机figure
plot(Convergence_curve,'LineWidth',2)
xlabel('Iteration');
ylabel('Best Cost');
grid on;


四、完整MATLAB代码见下方名片
相关文章:
基于PWLCM混沌映射的麋鹿群优化算法(Elk herd optimizer,EHO)的多无人机协同路径规划,MATLAB代码
一、麋鹿群优化算法EHO 基本概念 麋鹿群优化算法(EHO,Elephant Herding Optimization)是2024年提出的一种启发式优化算法,它的灵感来自麋鹿群的繁殖过程。麋鹿有两个主要的繁殖季节:发情和产犊。在发情季节࿰…...

Vue2五、自定义指令,全局局部注册、指令的值 ,插槽--默认插槽,具名插槽 ( 作用域插槽)
一、自定义指令 使用步骤 1. 注册 (全局注册 或 局部注册) ,在 inserted 钩子函数中,配置指令dom逻辑 2. 标签上 v-指令名 使用 1、自定义指令(全局) Vue.directive("指令名",{ 指令的配置项 insert…...

Pika Labs技术浅析(五):商业智能技术
Pika Labs 的商业智能旨在通过联机分析处理(OLAP)和数据仓库(Data Warehouse)等技术,帮助企业用户高效地进行数据分析和决策支持。 一、商业智能技术模块概述 Pika Labs 的商业智能技术模块旨在通过集成数据仓库和联机…...

YOLO-World:Real-Time Open-Vocabulary Object Detection
目录 摘要 Abstract YOLO-World 1 模型架构 1.1 Text Encoder 1.2 YOLO Backbone 2 RepVL-PAN 2.1 T-CSPLayer 2.2 I-Pooling Attention 2.3 预测 3 消融实验 3.1 预训练数据 3.2 RepVL-PAN的消融实验 3.3 文本编码器 4 效果展示 4.1 零样本 4.2 根据词汇表检…...

Fastjson <= 1.2.47 反序列化漏洞复现
0x01 前言 Fastjson 是一个 Java 语言编写的高性能功能完善的 JSON 库,可以将 Java 对象转换为 JSON 格式,也可以将 JSON 字符串转换为 Java 对象,在中国和美国使用较为广泛。 0x02 漏洞成因 Fastjson < 1.2.68 版本在处理反序列化对象时…...

鸿蒙项目云捐助第二十一讲云捐助项目物联网IoT模拟器的使用
鸿蒙项目云捐助第二十一讲云捐助项目物联网IoT模拟器的使用 在前面的内容中,已经实现了云捐助物联网IoT的产品及设备设置,并且使用华为云Iot设备的在线调试工具进行命令下发的调试,这里也可以通过华为Iot物联网提供的MQTT模拟器进行连接。 …...

大数据技术原理与应用期末复习-知识点(二)
HBASE Hbase与传统关系数据库的对比分析 1.数据类型: 关系型数据库采用关系模型 Hbase采用更简单的数据模型(把数据存储为未经解释的字符串) 2.数据操作: 关系数据库:增删改查等 Hbase:插入 查询 删…...

高效准确的PDF解析工具,赋能企业非结构化数据治理
目录 准确性高:还原复杂版面元素 使用便捷:灵活适配场景 贴心服务:快速响应机制 在数据为王的时代浪潮中,企业数据治理已成为组织优化运营、提高竞争力的关键。随着数字化进程的加速,企业所积累的数据量呈爆炸式增长…...

C/C++ 数据结构与算法【栈和队列】 栈+队列详细解析【日常学习,考研必备】带图+详细代码
一、介绍 栈和队列是限定插入和删除只能在表的“端点”进行的线性表,是线性表的子集,是插入和删除位置受限的线性表。 (操作受限的线性表) 二、栈 1)概念: 栈(stack)是一个特殊的线性表,是限…...

读书笔记~管理修炼-缄默效应
缄默效应:学会正确批评下属 员工明明犯了错误,却不及时告知你,总是拖到最后一刻无法弥补时才不得不承认出了问题——你遇到过这样的问题吗? 这其实是缄默效应在发挥作用。 在职场中,即使再扁平化的环境&…...

视频会议系统会前预约模块必须包含哪些功能?
视频会议系统会前预约模块必须包含哪些功能? 视频会议系统的会前预约模块是企业高效管理会议资源、提升会议效率的重要工具。一个完善的会前预约模块必须包含一系列功能,以确保会议的顺利进行和资源的合理分配。以下是对视频会议系统会前预约模块必须包…...

RabbitMQ中的Topic模式
在现代分布式系统中,消息队列(Message Queue)是实现异步通信、解耦系统组件的重要工具。RabbitMQ 是一个广泛使用的开源消息代理,支持多种消息传递模式,其中 Topic 模式 是一种灵活且强大的模式,允许生产者…...

tslib(触摸屏输入设备的轻量级库)的学习、编译及测试记录
目录 tslib的简介tslib的源码和make及make install后得到的文件下载tslib的主要功能tslib的工作原理tslib的核心组成部分tslib的框架和核心函数分析tslib的框架tslib的核心函数ts_setup()的分析(对如何获取设备名和数据处理流程的分析)函数ts_setup()自身的主要代码ts_setup()对…...

Ubuntu vi(vim)编辑器配置一键补全main函数
1.打开对应的配置文件 vi ~/.vim/snippets/c.snippets 2.按G将光标定位到文件末尾 3.按i进入插入模式 以tab键开头插入下的内容,空行也要加 tab键 4.:wq保存退出 5.再打开任意一个新的 .c文件后,插入模式输入 main 然后按tal键就能补全了...

验证码机制
偶然间看到了验证码机制,顺便总结一下: 首先,验证码是从后端生成的,随机生成; 【后端永远认为前端有可能会被伪造】 1.后端调用相关的绘图第三方类库,或是(平台PHP、.NET、java)系…...

【CVE-2024-56145】PHP 漏洞导致 Craft CMS 出现 RCE
大多数开发人员都同意,与 15 年前相比,PHP 是一种更加理智、更加安全和可靠的语言。PHP5早期的不良设计已让位于更好的开发生态系统,其中包括类、自动加载、更严格的类型、更理智的语法以及一大堆其他改进。安全性也没有被忽视。 register_globals一些老读者可能还记得和的…...

使用FakeSMTP创建本地SMTP服务器接收邮件具体实现。
以下代码来自Let’s Go further节选。具体说明均为作者本人理解。 编辑邮件模版 主要包含三个template: subject:主题plainBody: 纯文本正文htmlBody:超文本语言正文 {{define "subject"}}Welcome to Greenlight!{{end}} {{def…...

【网络安全】逆向工程 练习示例
1. 逆向工程简介 逆向工程 (RE) 是将某物分解以了解其功能的过程。在网络安全中,逆向工程用于分析应用程序(二进制文件)的运行方式。这可用于确定应用程序是否是恶意的或是否存在任何安全漏洞。 例如,网络安全分析师对攻击者分发…...

Oracle Database 21c Express Edition数据库 和 Sqlplus客户端安装配置
目录 一. 前置条件二. Win10安装配置Oracle数据库2.1 数据库获取2.2 数据库安装2.3 数据库配置确认2.4 数据库访问 三. Win10配置Oracle数据库可对外访问3.1 打开文件和打印机共享3.2 开放1521端口 四. 端口与地址确认4.1 查看监听器的状态4.2 Win10查看1521端口是否被监听4.3 …...
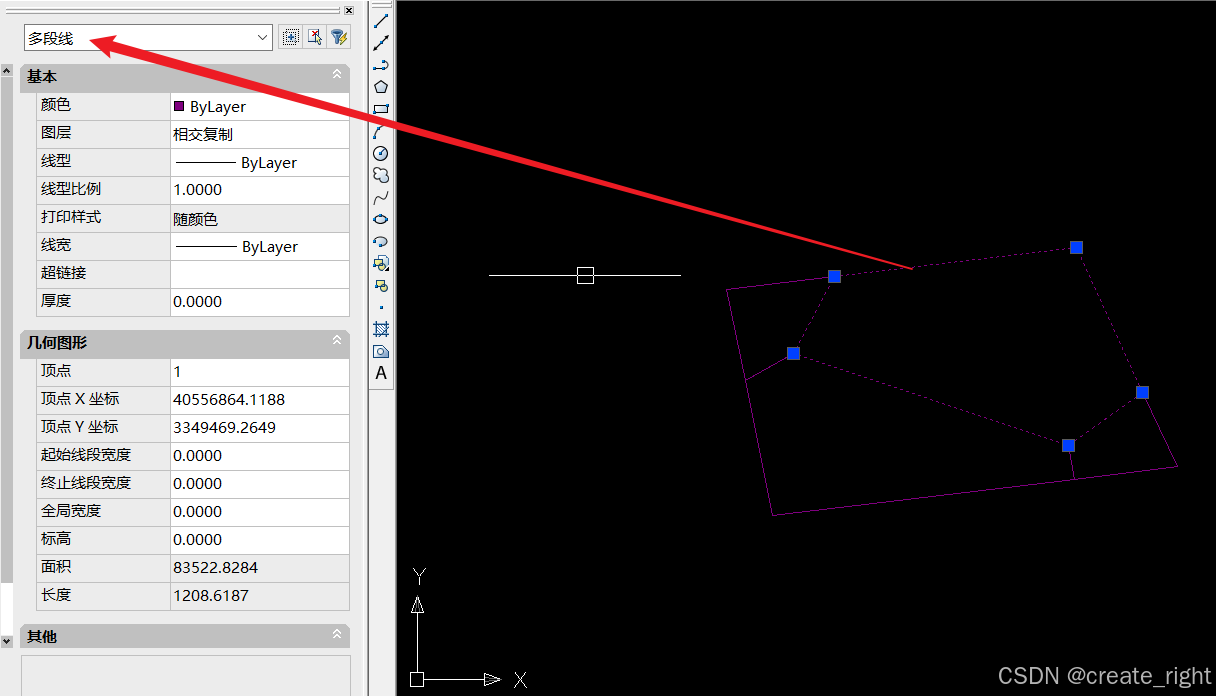
arcgisPro将面要素转成CAD多段线
1、说明:正常使用【导出为CAD】工具,则导出的是CAD三维多线段,无法进行编辑操作、读取面积等。这是因为要素面中包含Z值,导出则为三维多线段数据。需要利用【复制要素】工具禁用M值和Z值,再导出为CAD,则得到…...

iOS 18.1 5G功能深度解析:从智能省电到SA网络优化
1. 项目概述:一次聚焦于连接体验的深度更新作为一名长期跟踪移动操作系统生态的从业者,每次苹果发布新的iOS版本,我都会习惯性地去拆解其更新日志,看看哪些是“面子工程”,哪些是真正触及用户体验核心的“里子升级”。…...

Windows 和 Ubuntu 安装 Hermes Agent 全攻略
文章目录【开场白】【先说重点:Hermes 和 OpenClaw 装机区别】【Windows 安装:5 步搞定】第 1 步:装 WSL2第 2 步:更新 Ubuntu 系统第 3 步:一键装 Hermes第 4 步:让环境变量生效第 5 步:初始化…...

四旋翼无人机深度强化学习控制框架与实战优化
1. 四旋翼无人机端到端深度强化学习框架解析四旋翼无人机的自主飞行控制一直是机器人学领域的核心挑战。传统PID控制虽然稳定可靠,但在复杂动态环境中表现受限。深度强化学习(DRL)通过模拟环境交互实现智能决策,为无人机控制带来了…...
)
保姆级教程:用阿莫K202C-1烧录器搞定国产MCU(GD32/N32/APM32等)
国产MCU高效烧录实战:K202C-1脱机烧录器深度应用指南 1. 国产MCU崛起背景与烧录需求 近年来,国产MCU厂商如GD32、N32、APM32等品牌迅速崛起,凭借性价比优势在工业控制、消费电子等领域逐步替代进口芯片。根据行业调研数据,2023年国…...
)
基于 SOFAJRaft + Spring Boot 构建高可用 KV 存储集群(完整源码)
基于 SOFAJRaft + Spring Boot 构建高可用 KV 存储集群(完整源码) 引言 在分布式系统中,一致性 是核心难题。Raft 是比 Paxos 更易于理解的共识算法,而 SOFAJRaft 是蚂蚁集团开源的 Java 高性能 Raft 实现。 本文带你从零构建一个 3 节点高可用 KV 存储集群,包含完整源码、…...

FanControl:Windows平台终极风扇控制解决方案
FanControl:Windows平台终极风扇控制解决方案 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/fa/FanCont…...

FreeRTOS-Plus-TCP vs LwIP:在GD32F450上如何选择?附LAN8720A驱动避坑指南
FreeRTOS-Plus-TCP与LwIP在GD32F450上的深度对比与实战选型指南 当工程师在资源受限的GD32F450平台上构建网络功能时,FreeRTOS-Plus-TCP和LwIP这两个轻量级TCP/IP协议栈往往成为主要候选。本文将基于实际项目经验,从内存占用、性能表现、开发效率等维度进…...

别再混着用了!详解Nginx 1.25.1中独立的http2指令与listen指令的拆分逻辑
Nginx配置演进:从listen指令到独立http2指令的技术深析 当你在Nginx 1.25.1的日志中发现the "listen ... http2" directive is deprecated警告时,这不仅仅是一个简单的语法变更通知。它标志着Nginx在协议支持架构上的一次重要演进,…...
))
GESP6级C++考试语法知识(二十一、深度优先搜索(一、DFS 一条路走到黑))
第一课《迷宫探险队》——DFS 到底是什么?🌟一、故事开始:勇敢的小骑士1、很久很久以前,在算法王国里,有一座神秘的迷宫城堡。2、城堡里面:有墙壁有陷阱有死路还有一颗“黄金宝石”✨3、国王说:…...
)
你还在手动查证引文和逻辑漏洞?Perplexity书评辅助的实时溯源与反事实验证机制(仅限Pro+插件开放)
更多请点击: https://codechina.net 第一章:你还在手动查证引文和逻辑漏洞?Perplexity书评辅助的实时溯源与反事实验证机制(仅限Pro插件开放) Perplexity Pro 插件引入的实时溯源与反事实验证机制,彻底重构…...