OpenCV相机标定与3D重建(28)估计两个三维点集之间的最优平移变换函数estimateTranslation3D()的使用
- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
计算两个3D点集之间的最优平移。
它计算
[ x y z ] = [ X Y Z ] + [ b 1 b 2 b 3 ] \begin{bmatrix} x\\ y\\ z\\ \end{bmatrix} = \begin{bmatrix} X\\ Y\\ Z\\ \end{bmatrix} + \begin{bmatrix} b_1\\ b_2\\ b_3\\ \end{bmatrix} xyz = XYZ + b1b2b3
cv::estimateTranslation3D 是 OpenCV 库中的一个函数,用于估计两个三维点集之间的最优平移变换。此函数通常用于3D图像配准、物体识别和追踪等领域。它通过最小化源点集与目标点集之间的几何误差来估计平移向量,并且可以选择使用鲁棒方法(如RANSAC)来处理异常值(outliers)。
函数原型
int cv::estimateTranslation3D
(InputArray src,InputArray dst,OutputArray out,OutputArray inliers,double ransacThreshold = 3,double confidence = 0.99
) 参数
-
参数src 第一个输入的3D点集,包含 (X, Y, Z)。
-
参数dst 第二个输入的3D点集,包含 (x, y, z)。
-
参数out 输出的3D平移向量 3×1,形式如下:
[ b 1 b 2 b 3 ] \begin{bmatrix} b_1 \\ b_2 \\ b_3 \\ \end{bmatrix} b1b2b3 -
参数inliers 输出向量,指示哪些点是内点(1-内点,0-外点)。
-
参数ransacThreshold 在RANSAC算法中,考虑一个点为内点的最大重投影误差。
-
参数confidence 对估计变换的置信水平,在0和1之间。通常0.95到0.99之间的值就足够了。过于接近1的值可能会显著减慢估计过程。低于0.8-0.9的值可能导致变换估计不准确。
该函数使用RANSAC算法估计两个3D点集之间的最优3D平移。
代码示例
#include <iostream>
#include <opencv2/opencv.hpp>
#include <vector>using namespace cv;
using namespace std;int main()
{// 定义两组对应的3D点 (X, Y, Z) - 源点集和目标点集vector< Point3f > src = { Point3f( 0, 0, 0 ), Point3f( 1, 0, 0 ), Point3f( 0, 1, 0 ), Point3f( 0, 0, 1 ) };vector< Point3f > dst = { Point3f( 1, 1, 1 ), Point3f( 2, 1, 1 ), Point3f( 1, 2, 1 ), Point3f( 1, 1, 2 ) };// 定义一个 Mat 来接收输出的平移向量矩阵Mat translationVector;// 定义一个 Mat 来接收内点信息vector< uchar > inliers;// 调用 estimateTranslation3D 函数int inlierCount = estimateTranslation3D( src, dst, translationVector, inliers );if ( !translationVector.empty() ){cout << "Estimated Translation Vector:\n" << translationVector << endl;cout << "Number of inliers: " << inlierCount << endl;// 打印哪些点被认为是内点for ( size_t i = 0; i < inliers.size(); ++i ){if ( inliers[ i ] ){cout << "Point pair (" << src[ i ] << ", " << dst[ i ] << ") is an inlier.\n";}else{cout << "Point pair (" << src[ i ] << ", " << dst[ i ] << ") is an outlier.\n";}}}else{cout << "Failed to estimate translation." << endl;}return 0;
}
运行结果
Estimated Translation Vector:
[1, 1, 1]
Number of inliers: 1
Point pair ([0, 0, 0], [1, 1, 1]) is an inlier.
Point pair ([1, 0, 0], [2, 1, 1]) is an inlier.
Point pair ([0, 1, 0], [1, 2, 1]) is an inlier.
Point pair ([0, 0, 1], [1, 1, 2]) is an inlier.
相关文章:
OpenCV相机标定与3D重建(28)估计两个三维点集之间的最优平移变换函数estimateTranslation3D()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 计算两个3D点集之间的最优平移。 它计算 [ x y z ] [ X Y Z ] [ b 1 b 2 b 3 ] \begin{bmatrix} x\\ y\\ z\\ \end{bmatrix} \begin{bmatri…...

UE5仿漫威争锋灵蝶冲刺技能
这两天玩了一下漫威争锋Marvel Rivals,发现是UE5做的,对里面一些角色技能挺感兴趣的,想简单复刻一下技能功能,顺便复习一下学过的知识 首先把摄像机设置调整一下 CameraBoom里搜索lag 把摄像机延迟关掉 ,这样摄像机就…...

CSS盒子模型(溢出隐藏,块级元素和行级元素的居中对齐,元素样式重置)
overflow:值 规定了内容溢出元素框时所发生的事情 visible:内容不会被修剪,会显示在元素框之外,默认值 overflow: visible; hidden:内容会被修剪,溢出内容不可见 overflow: hidden; scroll:内…...

语音增强的损失函数选择
一、最优尺度不变信噪比(OSISNR)损失函数 参考:论文解读 --Optimal scale-invariant signal-to-noise ratio and curriculum learning for monaural multi-spea 最优尺度不变信噪比(OSI-SNR)是一种用于评估信号质量…...

【python自动化六】UI自动化基础-selenium的使用
selenium是目前用得比较多的UI自动化测试框架,支持java,python等多种语言,目前我们就选用selenium来做UI自动化。 1.selenium安装 安装命令 pip install selenium2.selenium的简单使用 本文以chrome浏览器为例,配套selenium中c…...

【习题答案】让您的应用拥有领先的位置服务能力
判断题 1.在使用(逆)地理编码前,需要使用isGeocoderAvailable检查服务状态。 正确(True) 错误(False) 2.当同时配置定位场景和优先级策略时,会优先使用优先级策略。 正确(True) 错误(False) 单选题 1.获取精准定位需要申请哪个权…...

java中list和map区别
在Java中,List和Map是两种不同类型的集合接口,它们用于不同的场景并且具有不同的特性和用途。以下是List和Map的主要区别: 1. 数据结构 List:是一个有序的集合,允许重复元素。它实现了Collection接口,并且…...

java后端传时间戳给前端的三种方式
一. 后端传时间戳给前端的几种方式 使用System.currentTimeMillis() 这是最简单的方式,返回自1970年1月1日(UTC)以来的毫秒数,可以直接传递给前端。 long timestamp1 System.currentTimeMillis();使用java.time.Instant Java…...

【机器学习与数据挖掘实战】案例06:基于Apriori算法的餐饮企业菜品关联分析
【作者主页】Francek Chen 【专栏介绍】 ⌈ ⌈ ⌈机器学习与数据挖掘实战 ⌋ ⌋ ⌋ 机器学习是人工智能的一个分支,专注于让计算机系统通过数据学习和改进。它利用统计和计算方法,使模型能够从数据中自动提取特征并做出预测或决策。数据挖掘则是从大型数据集中发现模式、关联…...

oracle: create new database
用database configuration Assistant 引导创建数据库。记得给system,sys 设置自己的口令,便于添加新操作用户。 创建操作用户: -- 别加双引号,否则,无法用 create user geovindu identified by 888888; create user geovin identi…...

混合开发环境---使用编程AI辅助开发Qt
文章目录 [toc]1、说明2、演示视频 1、说明 新时代的浪潮早就已经来临,上不了船的人终将被抛弃,合理使用AI辅助开发、提升效率是大趋势 注意:不要被AI奴隶 合理使用AI辅助编程,十倍提升效率。 大部分的编程AI都有vs code插件&…...

Sigrity SystemSI仿真分析教程文件路径
为了方便读者能够快速上手和学会Sigrity SystemSI 的功能,将Sigrity SystemSI仿真分析教程专栏所有文章对应的实例文件上传至以下路径 https://download.csdn.net/download/weixin_54787054/90171488?spm1001.2014.3001.5503...

【YashanDB知识库】Oracle pipelined函数在YashanDB中的改写
本文内容来自YashanDB官网,原文内容请见 https://www.yashandb.com/newsinfo/7802940.html?templateId1718516 【问题分类】功能使用 【关键字】pipelined 【问题描述】 Oracle PL/SQL中包含pipelined函数的对象迁移到YashanDB会出现不兼容现象。 【问题原因分…...
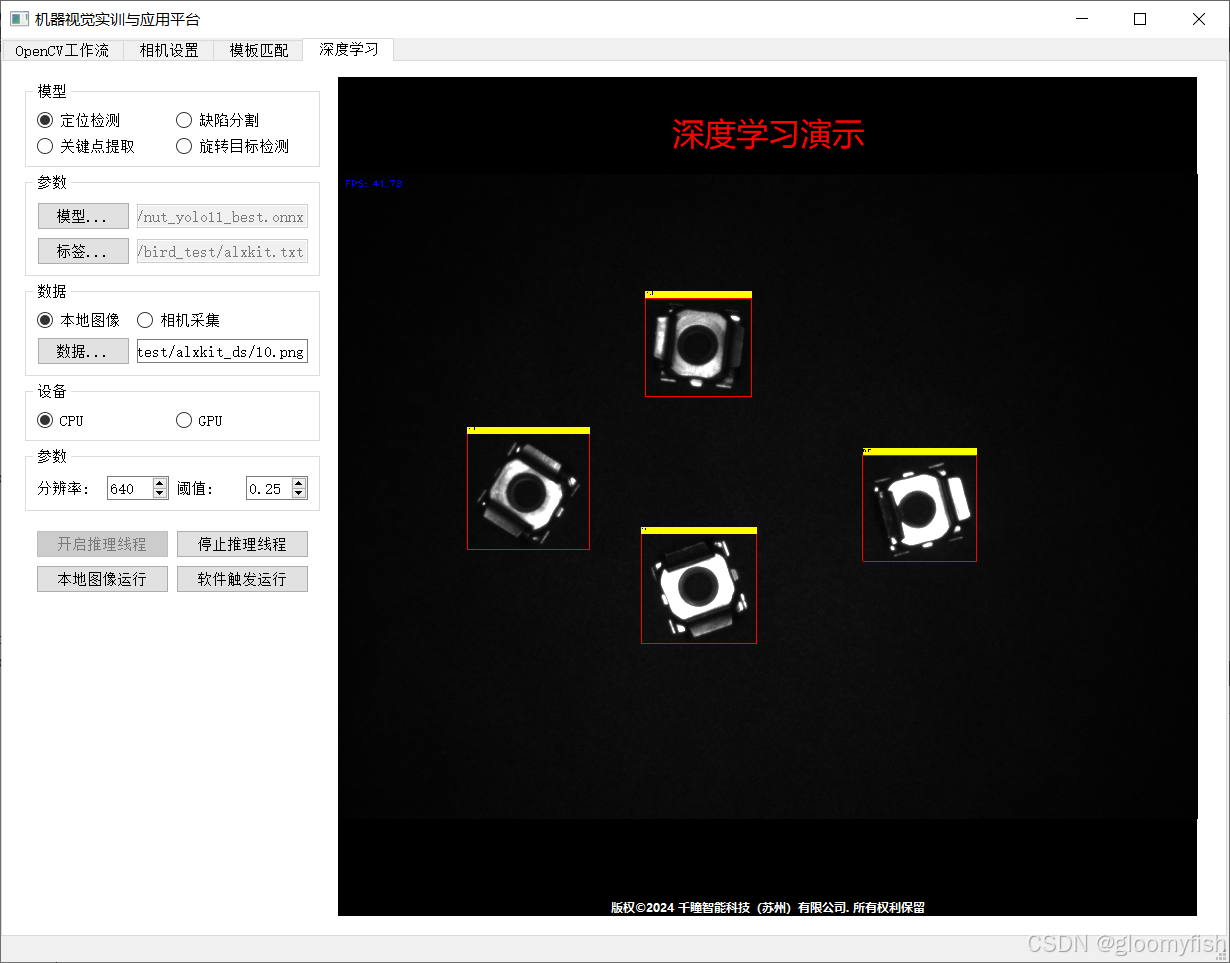
【开发实战】QT5+ 工业相机 + OpenCV工作流集成演示
学习《OpenCV应用开发:入门、进阶与工程化实践》一书 做真正的OpenCV开发者,从入门到入职,一步到位! 概述 基于OpenCV工作流引擎SDK Qt5 海康工业相机实现了从图像采集到OpenCV工作流运行的完整流程。其中工业相机采图是一个单…...
各种电机原理介绍
1,直流电机 (1)基本原理 直流电动机由直流电驱动电池或外部电源为其供电。在最简单的直流电动机中,定子为永磁体(即红蓝磁体外壳),转子是一个电磁体(即线圈),电流通过碳刷和一个换向器作用于转动的线圈。…...

深入了解 React:从入门到高级应用
深入了解 React:从入门到高级应用 React 是由 Facebook 开发并维护的一个开源 JavaScript 库,用于构建用户界面。自2013年发布以来,React 在前端开发领域迅速崛起,成为最受欢迎的 UI 构建工具之一。无论是小型的单页应用…...

Cglib代理简单案例
Cglib代理简单案例 前言: 1,实现对目标类的增强 2,源码后期补齐 步骤 1,添加cglib依赖 2,编写目标类,书写里面的方法 3,实现MethodInterceptor 接口,重写intercept方法 4ÿ…...

FreeMarker语法
1. 查找转移 <#function getSubSlot x > <#return (x) ? switch( "1", "L", "2", "R", "" )> </#function> 2. 转换数字 ?number ${mergedMap[placement.sequence].material.subs…...
)
DP动态规划(装箱问题)
# [NOIP2001 普及组] 装箱问题 ## 题目描述 有一个箱子容量为 $V$,同时有 $n$ 个物品,每个物品有一个体积。 现在从 $n$ 个物品中,任取若干个装入箱内(也可以不取),使箱子的剩余空间最小。输出这个最小值。…...

内网IP段介绍与汇总
IPV4内网段 IP地址段地址范围地址数量用途描述0.0.0.0/80.0.0.0–0.255.255.25516777216SoftwareCurrent network (only valid as source address).10.0.0.0/810.0.0.0–10.255.255.25516777216Private networkUsed for local communications within a private network.100.64…...

OpenClaw量化对比:Qwen3.5-4B-Claude-4.6-Opus-Reasoning-Distilled-GGUF不同精度版本的自动化任务表现
OpenClaw量化对比:Qwen3.5-4B-Claude-4.6-Opus-Reasoning-Distilled-GGUF不同精度版本的自动化任务表现 1. 测试背景与实验设计 去年在开发一个自动化文档处理流程时,我发现OpenClaw的任务成功率与底层模型量化精度密切相关。当时使用Q8版本处理Excel文…...

从零开始手搓一个xv6内核页表:跟着MIT 6.S081源码一步步理解虚拟内存初始化
从零构建xv6内核页表:深入解析RISC-V虚拟内存初始化实战 在MIT 6.S081操作系统的学习过程中,xv6作为教学用精简内核,其虚拟内存实现是理解现代计算机内存管理的关键。本文将带您从第一行代码开始,完整复现xv6内核页表的构建过程&…...

python-flask-djangol框架的婚恋相亲交友网站
目录技术选型与框架对比核心功能模块设计数据库模型示例(Django ORM)安全防护措施部署方案开发路线图项目技术支持源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作技术选型与框架对比 Flask:轻量级框架&a…...

MOSSE算法在无人机视频跟踪中的应用:一个被低估的轻量级选择?
MOSSE算法:无人机视觉跟踪中未被充分利用的高效解决方案 当你在树莓派或Jetson Nano这样的边缘设备上部署无人机视觉系统时,是否经常面临这样的困境:既需要实时性能,又受限于计算资源和功耗?在众多目标跟踪算法中&…...

HuTool代理请求遇阻:深入解析HTTP/1.1 407 Proxy Authentication Required的成因与实战解决方案
1. 当HuTool遇上407:代理认证失败的典型场景 最近在项目中使用HuTool发送HTTPS请求时,突然遇到一个让人头疼的错误——HTTP/1.1 407 Proxy Authentication Required。这个错误就像高速公路上的收费站,明明已经交了通行费(设置了代…...

如何快速使用OpCore Simplify:零基础黑苹果的终极配置指南
如何快速使用OpCore Simplify:零基础黑苹果的终极配置指南 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 还在为复杂的OpenCore配置而烦恼…...

Mermaid:文本驱动的可视化引擎深度指南
Mermaid:文本驱动的可视化引擎深度指南 【免费下载链接】mermaid mermaid-js/mermaid: 是一个用于生成图表和流程图的 Markdown 渲染器,支持多种图表类型和丰富的样式。适合对 Markdown、图表和流程图以及想要使用 Markdown 绘制图表和流程图的开发者。 …...

六边形地理索引的终极指南:H3算法如何革新空间数据分析
六边形地理索引的终极指南:H3算法如何革新空间数据分析 【免费下载链接】h3 Hexagonal hierarchical geospatial indexing system 项目地址: https://gitcode.com/gh_mirrors/h3/h3 你是否曾为处理大规模地理空间数据而头疼?传统的地理索引系统在…...

Matlab GUI 计时器:基于定时器对象自动更新的数字时钟演示
Matlab图形用户界面计时器:使用定时器对象自动更新的MatlabGUI,一个数字时钟,作为显示基本组件的快速演示,带有一个按钮,用于恢复/暂停执行更新实验室配了新酶标仪孵箱但总有人(比如同组摸鱼的小师妹顺便喊…...

微信单向好友检测终极指南:如何一键找出并清理删除你的微信好友
微信单向好友检测终极指南:如何一键找出并清理删除你的微信好友 【免费下载链接】WechatRealFriends 微信好友关系一键检测,基于微信ipad协议,看看有没有朋友偷偷删掉或者拉黑你 项目地址: https://gitcode.com/gh_mirrors/we/WechatRealFr…...