图像处理-Ch4-频率域处理
Ch4 频率域处理(Image Enhancement in Frequency Domain)
FT :将信号表示成各种频率的正弦信号的线性组合。
频谱: ∣ F ( u , v ) ∣ = [ R 2 ( u , v ) + I 2 ( u , v ) ] 1 2 |F(u, v)| = \left[ R^2(u, v) + I^2(u, v) \right]^{\frac{1}{2}} ∣F(u,v)∣=[R2(u,v)+I2(u,v)]21
相位角:$
\phi(u, v) = \tan^{-1}\left[\frac{I(u, v)}{R(u, v)}\right]$
功率谱: P ( u , v ) = ∣ F ( u , v ) ∣ 2 = R 2 ( u , v ) + I 2 ( u , v ) P(u, v) = |F(u, v)|^2 = R^2(u, v) + I^2(u, v) P(u,v)=∣F(u,v)∣2=R2(u,v)+I2(u,v)
- I ( u , v ) I(u, v) I(u,v): F ( u , v ) F(u, v) F(u,v) 的虚部。
- R ( u , v ) R(u, v) R(u,v): F ( u , v ) F(u, v) F(u,v) 的实部。
4.5 2-D Fourier Transform
4.5.1 2-D impulse
连续变量 t t t和 z z z的冲激函数 δ ( t , z ) \delta(t,z) δ(t,z)定义为:
δ ( t , z ) = { 1 , t = z = 0 0 , 其他 ∫ − ∞ ∞ ∫ − ∞ ∞ δ ( t , z ) d t d z = 1 \delta(t,z)=\begin{cases} 1,\quad t=z=0\\ 0,\quad \text{其他} \end{cases}\\ \int_{-\infty}^{\infty}\int_{-\infty}^{\infty}\delta(t,z)dtdz=1 δ(t,z)={1,t=z=00,其他∫−∞∞∫−∞∞δ(t,z)dtdz=1
取样性质:在冲激处产生函数的值。
∫ − ∞ ∞ ∫ − ∞ ∞ f ( t , z ) δ ( t , z ) d t d z = f ( 0 , 0 ) ∫ − ∞ ∞ ∫ − ∞ ∞ f ( t , z ) δ ( t − t 0 , z − z 0 ) d t d z = f ( t 0 , z 0 ) \int_{-\infty}^{\infty}\int_{-\infty}^{\infty}f(t,z)\delta(t,z)dtdz=f(0,0)\\ \int_{-\infty}^{\infty}\int_{-\infty}^{\infty}f(t,z)\delta(t-t_0,z-z_0)dtdz=f(t_0,z_0) ∫−∞∞∫−∞∞f(t,z)δ(t,z)dtdz=f(0,0)∫−∞∞∫−∞∞f(t,z)δ(t−t0,z−z0)dtdz=f(t0,z0)
离散变量x和y,2-D离散冲激定义为(与连续冲激倒是定义一致,在冲激处值为1):
δ ( x , y ) { 1 , x = y = 0 0 , 其他 \delta(x,y)\begin{cases} 1,\quad x=y=0\\ 0,\quad \text{其他} \end{cases} δ(x,y){1,x=y=00,其他
取样性质:
∑ x = − ∞ ∞ ∑ y = − ∞ ∞ f ( x , y ) δ ( x , y ) = f ( 0 , 0 ) ∑ x = − ∞ ∞ ∑ y = − ∞ ∞ f ( x , y ) δ ( x − x 0 , y − y 0 ) = f ( x 0 , y 0 ) \sum_{x=-\infty}^{\infty}\sum_{y=-\infty}^{\infty}f(x,y)\delta(x,y)=f(0,0)\\ \sum_{x=-\infty}^{\infty}\sum_{y=-\infty}^{\infty}f(x,y)\delta(x-x_0,y-y_0)=f(x_0,y_0) x=−∞∑∞y=−∞∑∞f(x,y)δ(x,y)=f(0,0)x=−∞∑∞y=−∞∑∞f(x,y)δ(x−x0,y−y0)=f(x0,y0)
处理有限维图像时,上述两个公式的限制改为图像的维数。
4.5.2 2-D Fourier Transform Pair(变换对)
2-D Fourier Transform:令 f ( t , z ) f(t,z) f(t,z)是两个连续变量 t t t, z z z的连续函数。
F ( μ , v ) = ∫ − ∞ ∞ ∫ − ∞ ∞ f ( t , z ) e − j 2 π ( μ t + v z ) d t d z f ( t , z ) = ∫ − ∞ ∞ ∫ − ∞ ∞ F ( μ , v ) e j 2 π ( μ t + v z ) d μ d v F(\mu,v)=\int_{-\infty}^{\infty}\int_{-\infty}^{\infty}f(t,z)e^{-j2\pi(\mu t+vz)}dtdz\\ f(t,z)=\int_{-\infty}^{\infty}\int_{-\infty}^{\infty}F(\mu,v)e^{j2\pi(\mu t+vz)}d\mu dv F(μ,v)=∫−∞∞∫−∞∞f(t,z)e−j2π(μt+vz)dtdzf(t,z)=∫−∞∞∫−∞∞F(μ,v)ej2π(μt+vz)dμdv
μ , v \mu, v μ,v是频率变量; t , z t,z t,z是连续空间变量。 μ , v \mu,v μ,v定义了连续频率域。
二维盒式函数:
f ( t , z ) = { A , − T 2 ≤ t ≤ T 2 , − Z 2 ≤ z ≤ Z 2 0 , 其他 f(t,z)=\begin{cases} A,\quad -\frac T 2\le t\le\frac T 2,-\frac Z 2\le z\le \frac Z 2 \\ 0,\quad \text{其他} \end{cases} f(t,z)={A,−2T≤t≤2T,−2Z≤z≤2Z0,其他对应的傅里叶变换如下:
KaTeX parse error: Expected 'EOF', got '&' at position 10: F(\mu,v)&̲=\int_{-\infty}…
联系到一维情况下连续函数的情况:
KaTeX parse error: Expected 'EOF', got '&' at position 6: f(t)&̲=\begin{cases} …
因为 e j θ − e − j θ = ( cos θ + j sin θ ) − ( cos θ − j sin θ ) = 2 j sin θ e^{j\theta}-e^{-j\theta}=(\cos\theta+j\sin\theta)-(\cos\theta-j\sin\theta)=2j\sin\theta ejθ−e−jθ=(cosθ+jsinθ)−(cosθ−jsinθ)=2jsinθ,所以:
KaTeX parse error: Expected 'EOF', got '&' at position 8: F(\mu)&̲=\frac{A}{\pi\m…
所以对于2-D情况下 F ( μ , v ) = A T Z [ s i n ( π μ T ) π μ T ] [ s i n ( π v Z ) π v Z ] F(\mu,v)=ATZ[\frac{sin(\pi\mu T)}{\pi\mu T}][\frac{sin(\pi v Z )}{\pi v Z}] F(μ,v)=ATZ[πμTsin(πμT)][πvZsin(πvZ)],更易理解。看下图:右图是频谱的一部分,谱中0位置与T,Z成反比,当 T > Z T\gt Z T>Z,谱沿 μ \mu μ轴更“收缩”。

4.5.3 2-D Sampling
先介绍一下1-D sampling:
因为时域与频域对称: f ( t ) → F T F ( μ ) , F ( t ) → F T f ( − μ ) f(t)\xrightarrow{\mathrm{FT}}F(\mu),F(t)\xrightarrow{\mathrm{FT}}f(-\mu) f(t)FTF(μ),F(t)FTf(−μ)
δ ( t − t 0 ) → F T e − j 2 π μ t 0 , e − j 2 π μ t 0 → F T δ ( − μ − t 0 ) = δ ( μ + t 0 ) \delta(t-t_0)\xrightarrow{\mathrm{FT}}e^{-j2\pi\mu t_0}, e^{-j2\pi\mu t_0}\xrightarrow{\mathrm{FT}}\delta(-\mu-t_0)=\delta(\mu+t_0) δ(t−t0)FTe−j2πμt0,e−j2πμt0FTδ(−μ−t0)=δ(μ+t0)
冲激串:
S Δ T ( t ) = ∑ k = − ∞ ∞ δ ( t − k Δ T ) = ∑ n = − ∞ ∞ C n e j 2 π n Δ T t C n = 1 Δ T ∫ − Δ T 2 Δ T 2 S Δ T ( t ) e − j 2 π n Δ T t d t S_{\Delta T}(t)=\sum^{\infty}_{k=-\infty}\delta(t-k\Delta T)=\sum^{\infty}_{n=-\infty}C_ne^{j\frac{2\pi n}{\Delta T}t}\\ C_n=\frac{1}{\Delta T}\int_{-\frac{\Delta T}{2}}^{\frac{\Delta T}{2}}S_{\Delta T}(t)e^{-j\frac{2\pi n}{\Delta T}t}dt SΔT(t)=k=−∞∑∞δ(t−kΔT)=n=−∞∑∞CnejΔT2πntCn=ΔT1∫−2ΔT2ΔTSΔT(t)e−jΔT2πntdt
当t=0时产生冲激( [ − Δ T 2 , Δ T 2 ] [-\frac{\Delta T}{2},\frac{\Delta T}{2}] [−2ΔT,2ΔT]区间内积分仅包含t=0处冲激),此时 C n = 1 Δ T ∫ − Δ T 2 Δ T 2 S Δ T ( t ) e − j 2 π n Δ T t d t = 1 Δ T C_n=\frac{1}{\Delta T}\int_{-\frac{\Delta T}{2}}^{\frac{\Delta T}{2}}S_{\Delta T}(t)e^{-j\frac{2\pi n}{\Delta T}t}dt=\frac{1}{\Delta T} Cn=ΔT1∫−2ΔT2ΔTSΔT(t)e−jΔT2πntdt=ΔT1:
S Δ T ( t ) = ∑ n = − ∞ ∞ 1 Δ T e j 2 π n Δ T t S_{\Delta T}(t)=\sum^{\infty}_{n=-\infty}\frac{1}{\Delta T}e^{j\frac{2\pi n}{\Delta T}t} SΔT(t)=n=−∞∑∞ΔT1ejΔT2πnt
对 S Δ T ( t ) S_{\Delta T}(t) SΔT(t)进行傅里叶变换:
S Δ T ( t ) → F T 1 Δ T ∑ n = − ∞ ∞ δ ( μ − n Δ T ) e j 2 π n Δ T t → F T δ ( μ − n Δ T ) S_{\Delta T}(t)\xrightarrow{\mathrm{FT}}\frac{1}{\Delta T}\sum_{n=-\infty}^{\infty}\delta(\mu-\frac{n}{\Delta T})\\ e^{\frac{j2\pi n}{\Delta T}t}\xrightarrow{\mathrm{FT}}\delta(\mu-\frac{n}{\Delta T}) SΔT(t)FTΔT1n=−∞∑∞δ(μ−ΔTn)eΔTj2πntFTδ(μ−ΔTn)
对于2-D冲激串被定义为:
S Δ T ( t , z ) = ∑ m = − ∞ ∞ ∑ n = − ∞ ∞ δ ( t − m Δ T , z − n Δ Z ) S_{\Delta T}(t,z)=\sum^{\infty}_{m=-\infty}\sum^{\infty}_{n=-\infty}\delta(t-m\Delta T,z-n\Delta Z) SΔT(t,z)=m=−∞∑∞n=−∞∑∞δ(t−mΔT,z−nΔZ)
Δ T , Δ Z \Delta T,\Delta Z ΔT,ΔZ是连续函数 f ( t , z ) f(t,z) f(t,z)沿t轴和z轴的样本间的间隔。上式描述了沿两个轴无限扩展的一组周期冲激。
2-D带限函数:在 [ − μ max , μ max ] , [ − v max , v m a x ] [-\mu_{\max},\mu_{\max}],[-v_{\max},v_{max}] [−μmax,μmax],[−vmax,vmax]建立的频率域矩阵外, f ( t , z ) → F T 0 f(t,z)\xrightarrow{\mathrm{FT}}0 f(t,z)FT0:
F ( μ , v ) = 0 , ∣ μ ∣ ≥ μ max , ∣ v ∣ ≥ v max F(\mu,v)=0, \quad |\mu|\ge\mu_{\max},|v|\ge v_{\max} F(μ,v)=0,∣μ∣≥μmax,∣v∣≥vmax
带限:当且仅当 f ( t , z ) f(t,z) f(t,z)在两个坐标方向无限扩展的时候, f ( t , z ) f(t,z) f(t,z)一般才可能是带限的。
2-D取样定理:间隔满足 Δ T < 1 2 μ max , Δ Z < 1 2 v max \Delta T<\frac 1 {2\mu_{\max}},\Delta Z\lt \frac 1 {2v_{\max}} ΔT<2μmax1,ΔZ<2vmax1or 1 Δ T > 2 μ max , 1 Δ Z > 2 v max \frac 1{\Delta T}\gt2\mu_{\max},\frac1{\Delta Z}\gt 2v_{\max} ΔT1>2μmax,ΔZ1>2vmax,则连续带限函数f(t,z)可由其一组样本无误地复原(无信息丢失)。
4.5.5 2-D DFT, IDFT
书上的形式:
DFT: F ( u , v ) = ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) e − j 2 π ( u x M + v y M ) IDFT : f ( x , y ) = 1 M N ∑ u = 0 M − 1 ∑ v = 0 N − 1 F ( u . v ) e j 2 π ( u x M + v y M ) \text{DFT:}\\ F(u,v)=\sum^{M-1}_{x=0}\sum^{N-1}_{y=0}f(x,y)e^{-j2\pi(\frac{ux}{M}+\frac{vy}{M})}\\ \text{IDFT}:\\ f(x,y)=\frac{1}{MN}\sum^{M-1}_{u=0}\sum^{N-1}_{v=0}F(u.v)e^{j2\pi(\frac{ux}{M}+\frac{vy}{M})} DFT:F(u,v)=x=0∑M−1y=0∑N−1f(x,y)e−j2π(Mux+Mvy)IDFT:f(x,y)=MN1u=0∑M−1v=0∑N−1F(u.v)ej2π(Mux+Mvy)
PPT中给出的形式(此时这个常数的平方根应包含在正变换和反变换前面,以便形成一个更为对称的变换对):
DFT: F ( u , v ) = 1 M N ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) e − j 2 π ( u x M + v y M ) IDFT : f ( x , y ) = ∑ u = 0 M − 1 ∑ v = 0 N − 1 F ( u . v ) e j 2 π ( u x M + v y M ) \text{DFT:}\\ F(u,v)=\frac{1}{MN}\sum^{M-1}_{x=0}\sum^{N-1}_{y=0}f(x,y)e^{-j2\pi(\frac{ux}{M}+\frac{vy}{M})}\\ \text{IDFT}:\\ f(x,y)=\sum^{M-1}_{u=0}\sum^{N-1}_{v=0}F(u.v)e^{j2\pi(\frac{ux}{M}+\frac{vy}{M})} DFT:F(u,v)=MN1x=0∑M−1y=0∑N−1f(x,y)e−j2π(Mux+Mvy)IDFT:f(x,y)=u=0∑M−1v=0∑N−1F(u.v)ej2π(Mux+Mvy)
4.6 2-D DFT, IDFT的性质
-
空间间隔与频率间隔: Δ u , Δ v \Delta u,\Delta v Δu,Δv与 Δ T , Δ Z \Delta T,\Delta Z ΔT,ΔZ成反比。
对连续函数 f ( t , z ) f(t,z) f(t,z)取样生成了一副数字图像 f ( x , y ) f(x,y) f(x,y),它由t方向和z方向所取得 M × N M\times N M×N个样本组成。令 Δ T , Δ Z \Delta T,\Delta Z ΔT,ΔZ表示样本间的间隔。频率域对应的离散变量间的间隔分别为 Δ u = 1 M Δ T , Δ v = 1 N Δ Z \Delta u=\frac{1}{M\Delta T},\Delta v=\frac{1}{N\Delta Z} Δu=MΔT1,Δv=NΔZ1。
-
平移(shifting):
-
时间平移 (Time-shifting):图像在空间域中的平移(时移)会导致频域中乘以一个复指数因子。该复指数因子只影响相位,不影响幅度。
J [ f ( x − x 0 , y − y 0 ) ] = F ( u , v ) e − j 2 π ( u x 0 M + v y 0 N ) \mathfrak{J}[f(x-x_0, y-y_0)] = F(u, v)e^{-j2\pi\left(\frac{ux_0}{M} + \frac{vy_0}{N}\right)} J[f(x−x0,y−y0)]=F(u,v)e−j2π(Mux0+Nvy0) -
频率平移 (Frequency shifting):空间域中乘以一个复指数因子会导致频率平移。常用于将频域中心 (0, 0) 平移到图像中心 (如
fftshift操作)。
J [ f ( x , y ) e − j 2 π ( u 0 x M + v 0 y N ) ] = F ( u − u 0 , v − v 0 ) J [ f ( x , y ) ( − 1 ) x + y ] = F ( u − M 2 , v − N 2 ) \mathfrak{J}[f(x, y)e^{-j2\pi\left(\frac{u_0x}{M} + \frac{v_0y}{N}\right)}] = F(u-u_0, v-v_0)\\ \mathfrak{J}[f(x, y)(-1)^{x+y}] = F(u-\frac{M}{2}, v-\frac{N}{2}) J[f(x,y)e−j2π(Mu0x+Nv0y)]=F(u−u0,v−v0)J[f(x,y)(−1)x+y]=F(u−2M,v−2N)
-
-
对称性(Symmetry):
- 平均值 (Average): F ( 0 , 0 ) = 1 M N ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) F(0, 0) = \frac{1}{MN}\sum_{x=0}^{M-1}\sum_{y=0}^{N-1}f(x, y) F(0,0)=MN1∑x=0M−1∑y=0N−1f(x,y)
- 共轭对称性 (Conjugate Symmetric): F ( u , v ) = F ∗ ( − u , − v ) F(u, v) = F^*(-u, -v) F(u,v)=F∗(−u,−v)
- 对称性 (Symmetric): ∣ F ( u , v ) ∣ = ∣ F ( − u , − v ) ∣ |F(u, v)| = |F(-u, -v)| ∣F(u,v)∣=∣F(−u,−v)∣
-
分离性 (Separability): 二维傅里叶变换可以分解为两次一维傅里叶变换(行、列),这降低了计算复杂度,便于实现快速傅里叶变换(FFT)。
F ( u , v ) = 1 N ∑ y = 0 N − 1 [ 1 M ∑ x = 0 M − 1 f ( x , y ) e − j 2 π u x M ] e − j 2 π v y N F(u, v) = \frac{1}{N} \sum_{y=0}^{N-1} \left[\frac{1}{M} \sum_{x=0}^{M-1} f(x, y) e^{-j 2\pi \frac{ux}{M}}\right] e^{-j 2\pi \frac{vy}{N}} F(u,v)=N1y=0∑N−1[M1x=0∑M−1f(x,y)e−j2πMux]e−j2πNvy -
旋转 (Rotation):图像在空间域中的旋转会导致频域中相应的旋转。如果图像旋转了角度 θ 0 \theta_0 θ0,其频谱也旋转相同角度。
KaTeX parse error: Undefined control sequence: \iffF at position 25: …eta + \theta_0)\̲i̲f̲f̲F̲(\omega, \phi +… -
周期性 (Periodicity): 离散傅里叶变换具有周期性,频域中的数据在 M × N M \times N M×N范围内重复。
f ( x , y ) = f ( x + M , y ) = f ( x , y + N ) = f ( x + M , y + N ) F ( u , v ) = F ( u + M , v ) = F ( u , v + N ) = F ( u + M , v + N ) f(x, y) = f(x + M, y) = f(x, y + N) = f(x + M, y + N)\\ F(u, v) = F(u + M, v) = F(u, v + N) = F(u + M, v + N) f(x,y)=f(x+M,y)=f(x,y+N)=f(x+M,y+N)F(u,v)=F(u+M,v)=F(u,v+N)=F(u+M,v+N) -
线性性 (Linearity): 傅里叶变换是线性运算,两个图像的加权组合在频域中仍是对应频域组合的加权和。
J [ a f ( x , y ) + b g ( x , y ) ] = a J [ f ( x , y ) ] + b J [ g ( x , y ) ] \mathfrak{J}[af(x, y) + bg(x, y)] = a\mathfrak{J}[f(x, y)] + b\mathfrak{J}[g(x, y)] J[af(x,y)+bg(x,y)]=aJ[f(x,y)]+bJ[g(x,y)] -
微分性 (Differentiation): 图像在空间域中的微分对应频域中的乘法运算。二阶微分对应 − 4 π 2 ( u 2 + v 2 ) -4\pi^2(u^2 + v^2) −4π2(u2+v2),与拉普拉斯算子相关。
J [ ∂ n f ( x , y ) ∂ x n ] = ( j 2 π u ) n J [ f ( x , y ) ] J [ ∇ 2 f ( x , y ) ] = − 4 π 2 ( u 2 + v 2 ) F ( u , v ) \mathfrak{J}\left[\frac{\partial^n f(x, y)}{\partial x^n}\right] = (j2\pi u)^n \mathfrak{J}[f(x, y)]\\ \mathfrak{J}\left[\nabla^2 f(x, y)\right] = -4\pi^2(u^2 + v^2)F(u, v) J[∂xn∂nf(x,y)]=(j2πu)nJ[f(x,y)]J[∇2f(x,y)]=−4π2(u2+v2)F(u,v) -
卷积(Convolution): J [ f ( x , y ) ∗ g ( x , y ) ] = F ( u , v ) G ( u , v ) \mathfrak{J}[f(x, y) * g(x, y)] = F(u, v)G(u, v) J[f(x,y)∗g(x,y)]=F(u,v)G(u,v)
-
相关(Correlation): J [ f ( x , y ) ∘ g ( x , y ) ] = F ( u , v ) ⋅ G ∗ ( u , v ) \mathfrak{J}[f(x, y) \circ g(x, y)] = F(u, v) \cdot G^*(u, v) J[f(x,y)∘g(x,y)]=F(u,v)⋅G∗(u,v)
-
相似性 (Similarity): 图像在空间域中发生缩放时,频域数据会发生相反的缩放,并且幅度会按照缩放比例调整。
J [ f ( a x , b y ) ] = 1 ∣ a b ∣ F ( u a , v b ) \mathfrak{J}[f(ax, by)] = \frac{1}{|ab|} F\left(\frac{u}{a}, \frac{v}{b}\right) J[f(ax,by)]=∣ab∣1F(au,bv)
4.6.1 总结
| 名称 | 表达式 |
|---|---|
| 1) 离散傅里叶变换 (DFT) of f ( x , y ) f(x, y) f(x,y) | F ( u , v ) = ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) e − j 2 π ( u x M + v y N ) F(u, v) = \sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y)e^{-j2\pi\left(\frac{ux}{M} + \frac{vy}{N}\right)} F(u,v)=∑x=0M−1∑y=0N−1f(x,y)e−j2π(Mux+Nvy) |
| 2) 逆离散傅里叶变换 (IDFT) of F ( u , v ) F(u, v) F(u,v) | f ( x , y ) = 1 M N ∑ u = 0 M − 1 ∑ v = 0 N − 1 F ( u , v ) e j 2 π ( u x M + v y N ) f(x, y) = \frac{1}{MN} \sum_{u=0}^{M-1} \sum_{v=0}^{N-1} F(u, v)e^{j2\pi\left(\frac{ux}{M} + \frac{vy}{N}\right)} f(x,y)=MN1∑u=0M−1∑v=0N−1F(u,v)ej2π(Mux+Nvy) |
| 3) 频谱 | $ |
| 4) 相位角 | ϕ ( u , v ) = tan − 1 [ I ( u , v ) R ( u , v ) ] \phi(u, v) = \tan^{-1}\left[\frac{I(u, v)}{R(u, v)}\right] ϕ(u,v)=tan−1[R(u,v)I(u,v)] |
| 5) 极坐标表示 | $F(u, v) = |
| 6) 功率谱 | $P(u, v) = |
| 7) 平均值 | f ˉ = 1 M N ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) = 1 M N F ( 0 , 0 ) \bar{f} = \frac{1}{MN} \sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y) = \frac{1}{MN} F(0, 0) fˉ=MN1∑x=0M−1∑y=0N−1f(x,y)=MN1F(0,0) |
| 8) 周期性 ( k 1 , k 2 k_1, k_2 k1,k2 为整数) | F ( u , v ) = F ( u + k 1 M , v + k 2 N ) f ( x , y ) = f ( x + k 1 M , y + k 2 N ) \begin{aligned} F(u, v) &= F(u+k_1M, v+k_2N) \\ f(x, y) &= f(x+k_1M, y+k_2N) \end{aligned} F(u,v)f(x,y)=F(u+k1M,v+k2N)=f(x+k1M,y+k2N) |
| 9) 卷积 | ( f ∗ h ) ( x , y ) = ∑ m = 0 M − 1 ∑ n = 0 N − 1 f ( m , n ) h ( x − m , y − n ) (f \ast h)(x, y) = \sum_{m=0}^{M-1} \sum_{n=0}^{N-1} f(m, n)h(x-m, y-n) (f∗h)(x,y)=∑m=0M−1∑n=0N−1f(m,n)h(x−m,y−n) |
| 10) 相关 | ( f ⋆ h ) ( x , y ) = ∑ m = 0 M − 1 ∑ n = 0 N − 1 f ( m , n ) h ( x + m , y + n ) (f \star h)(x, y) = \sum_{m=0}^{M-1} \sum_{n=0}^{N-1} f(m, n)h(x+m, y+n) (f⋆h)(x,y)=∑m=0M−1∑n=0N−1f(m,n)h(x+m,y+n) |
| 11) 可分性 | 2D DFT 可以通过对图像的每一行(或列)计算 1D DFT,再对每一列(或行)计算 1D DFT 得到。详见 Section 4.11。 |
| 12) 使用DFT算法计算 IDFT | M N f ∗ ( x , y ) = ∑ u = 0 M − 1 ∑ v = 0 N − 1 F ∗ ( u , v ) e j 2 π ( u x M + v y N ) MNf^*(x, y) = \sum_{u=0}^{M-1} \sum_{v=0}^{N-1} F^*(u, v)e^{j2\pi\left(\frac{ux}{M} + \frac{vy}{N}\right)} MNf∗(x,y)=∑u=0M−1∑v=0N−1F∗(u,v)ej2π(Mux+Nvy) |
| 名称 | 傅里叶变换对 (DFT Pairs) |
|---|---|
| 1) 对称性质 | 参见 Table 4.1 |
| 2) 线性 | a f 1 ( x , y ) + b f 2 ( x , y ) ⟺ a F 1 ( u , v ) + b F 2 ( u , v ) af_1(x, y) + bf_2(x, y) \iff aF_1(u, v) + bF_2(u, v) af1(x,y)+bf2(x,y)⟺aF1(u,v)+bF2(u,v) |
| 3) 平移 (通用) | f ( x , y ) e j 2 π ( u x 0 / M + v y 0 / N ) ⟺ F ( u − u 0 , v − v 0 ) f ( x − x 0 , y − y 0 ) ⟺ F ( u , v ) e − j 2 π ( u x 0 / M + v y 0 / N ) \begin{aligned} f(x, y)e^{j2\pi(ux_0/M + vy_0/N)} &\iff F(u-u_0, v-v_0) \\ f(x-x_0, y-y_0) &\iff F(u, v)e^{-j2\pi(ux_0/M + vy_0/N)} \end{aligned} f(x,y)ej2π(ux0/M+vy0/N)f(x−x0,y−y0)⟺F(u−u0,v−v0)⟺F(u,v)e−j2π(ux0/M+vy0/N) |
| 4) 频域中心移动 (M/2, N/2) | f ( x , y ) ( − 1 ) x + y ⟺ F ( u − M / 2 , v − N / 2 ) f ( x − M / 2 , y − N / 2 ) ⟺ F ( u , v ) ( − 1 ) u + v \begin{aligned} f(x, y)(-1)^{x+y} &\iff F(u-M/2, v-N/2) \\ f(x-M/2, y-N/2) &\iff F(u, v)(-1)^{u+v} \end{aligned} f(x,y)(−1)x+yf(x−M/2,y−N/2)⟺F(u−M/2,v−N/2)⟺F(u,v)(−1)u+v |
| 5) 旋转 | f ( r , θ + θ 0 ) ⟺ F ( ω , ϕ + θ 0 ) r = x 2 + y 2 , ω = u 2 + v 2 , θ = tan − 1 ( y / x ) , ϕ = tan − 1 ( v / u ) \begin{aligned} f(r, \theta + \theta_0) &\iff F(\omega, \phi + \theta_0) \\ r &= \sqrt{x^2 + y^2}, \quad \omega = \sqrt{u^2 + v^2}, \\ \theta &= \tan^{-1}(y/x), \quad \phi = \tan^{-1}(v/u) \end{aligned} f(r,θ+θ0)rθ⟺F(ω,ϕ+θ0)=x2+y2,ω=u2+v2,=tan−1(y/x),ϕ=tan−1(v/u) |
| 6) 卷积定理 † | ( f ∗ h ) ( x , y ) ⟺ ( F ⋅ H ) ( u , v ) ( f ⋅ h ) ( x , y ) ⟺ ( 1 / M N ) [ ( F ∗ H ) ( u , v ) ] \begin{aligned} (f \ast h)(x, y) &\iff (F \cdot H)(u, v) \\ (f \cdot h)(x, y) &\iff (1/MN)[(F \ast H)(u, v)] \end{aligned} (f∗h)(x,y)(f⋅h)(x,y)⟺(F⋅H)(u,v)⟺(1/MN)[(F∗H)(u,v)] |
| 7) 相关定理 † | ( f ⋆ h ) ( x , y ) ⟺ ( F ∗ ⋅ H ) ( u , v ) ( f ∗ ⋅ h ) ( x , y ) ⟺ ( 1 / M N ) [ ( F ⋆ H ) ( u , v ) ] \begin{aligned} (f \star h)(x, y) &\iff (F^* \cdot H)(u, v) \\ (f^* \cdot h)(x, y) &\iff (1/MN)[(F \star H)(u, v)] \end{aligned} (f⋆h)(x,y)(f∗⋅h)(x,y)⟺(F∗⋅H)(u,v)⟺(1/MN)[(F⋆H)(u,v)] |
| 8) 离散单位脉冲 | δ ( x , y ) ⟺ 1 ⟺ M N δ ( u , v ) \delta(x, y) \iff 1 \iff MN\delta(u, v) δ(x,y)⟺1⟺MNδ(u,v) |
| 9) 矩形 | rec [ a , b ] ⟺ sin ( π u a ) π u a sin ( π v b ) π v b e − j ( u a + v b ) \text{rec}[a, b] \iff \frac{\sin(\pi ua)}{\pi ua} \frac{\sin(\pi vb)}{\pi vb} e^{-j(ua+vb)} rec[a,b]⟺πuasin(πua)πvbsin(πvb)e−j(ua+vb) |
| 10) 正弦 | sin ( 2 π u 0 / M + 2 π v 0 / N ) ⟺ j M N 2 [ δ ( u + u 0 , v + v 0 ) − δ ( u − u 0 , v − v 0 ) ] \sin(2\pi u_0/M + 2\pi v_0/N) \iff j\frac{MN}{2}[\delta(u+u_0, v+v_0) - \delta(u-u_0, v-v_0)] sin(2πu0/M+2πv0/N)⟺j2MN[δ(u+u0,v+v0)−δ(u−u0,v−v0)] |
| 11) 余弦 | cos ( 2 π u 0 / M + 2 π v 0 / N ) ⟺ M N 2 [ δ ( u + u 0 , v + v 0 ) + δ ( u − u 0 , v − v 0 ) ] \cos(2\pi u_0/M + 2\pi v_0/N) \iff \frac{MN}{2}[\delta(u+u_0, v+v_0) + \delta(u-u_0, v-v_0)] cos(2πu0/M+2πv0/N)⟺2MN[δ(u+u0,v+v0)+δ(u−u0,v−v0)] |
| 12) 微分 (假设边界条件为0) | ∂ f ∂ x ⟺ j ( 2 π u / M ) F ( u , v ) ∂ 2 f ∂ x 2 ⟺ − ( 2 π u / M ) 2 F ( u , v ) \begin{aligned} \frac{\partial f}{\partial x} &\iff j(2\pi u/M)F(u, v) \\ \frac{\partial^2 f}{\partial x^2} &\iff -(2\pi u/M)^2F(u, v) \end{aligned} ∂x∂f∂x2∂2f⟺j(2πu/M)F(u,v)⟺−(2πu/M)2F(u,v) |
| 13) 高斯 | A 2 π σ 2 e − 2 π 2 σ 2 ( u 2 + v 2 ) ⟺ A e − ( u 2 + v 2 ) / σ 2 A2\pi\sigma^2 e^{-2\pi^2\sigma^2(u^2+v^2)} \iff Ae^{-(u^2+v^2)/\sigma^2} A2πσ2e−2π2σ2(u2+v2)⟺Ae−(u2+v2)/σ2 |
注:傅里叶变换对对于连续变量可以进一步推导(以 t t t 和 z z z 表示空间变量, u u u 和 v v v 表示频率变量),这些结果可以通过采样离散变量用于 DFT 工作。
2-D Discrete Fourier Transform
2-D Fourier Transform
| 定义 | 说明 |
|---|---|
| 傅里叶级数 | 任何周期性重复的函数都可以表示为不同频率的正弦和/或余弦之和,每个乘以不同的系数。 |
| 傅里叶变换 | 即使不是周期性的函数(但其曲线下面积是有限的)也可以表示为正弦和/或余弦乘以加权函数的积分。 |
| 频域 | 指图像的二维离散傅里叶变换的平面。 |
| 傅里叶变换的目的 | 将信号表示为各种频率的正弦信号的线性组合。 |
2-D Continuous Fourier Transform
j = − 1 , e j θ = cos θ + j sin θ j=\sqrt{-1},\quad e^{j\theta}=\cos\theta+j\sin\theta j=−1,ejθ=cosθ+jsinθ
1-D傅里叶变换与逆:
F ( u ) = ∫ − ∞ ∞ f ( x ) e − j 2 π u x d x f ( x ) = ∫ − ∞ ∞ F ( u ) e j 2 π u x d u F(u)=\int^\infty_{-\infty}f(x)e^{-j2\pi u x}dx\\ f(x)=\int^\infty_{-\infty}F(u)e^{j2\pi u x}du F(u)=∫−∞∞f(x)e−j2πuxdxf(x)=∫−∞∞F(u)ej2πuxdu
2-D傅里叶变换与逆:
F ( u , v ) = ∫ − ∞ ∞ ∫ − ∞ ∞ f ( x , y ) e − j 2 π ( u x + v y ) d x d y f ( x , y ) = ∫ − ∞ ∞ ∫ − ∞ ∞ F ( u , v ) e j 2 π ( u x + v y ) d u d v F(u,v)=\int^\infty_{-\infty}\int^\infty_{-\infty}f(x,y)e^{-j2\pi (ux+vy)}dxdy\\ f(x,y)=\int^\infty_{-\infty}\int^\infty_{-\infty}F(u,v)e^{j2\pi(ux+vy)}dudv F(u,v)=∫−∞∞∫−∞∞f(x,y)e−j2π(ux+vy)dxdyf(x,y)=∫−∞∞∫−∞∞F(u,v)ej2π(ux+vy)dudv
2-D Discrete Fourier Transform
1-D Discrete Fourier Transform
1-D离散傅里叶变换和逆是: u , x = 0 , 1 , … , M − 1 u,x = 0,1,\dots,M-1 u,x=0,1,…,M−1
F ( u ) = 1 M ∑ x = 0 M − 1 f ( x ) e − j 2 π u x M f ( x ) = ∑ u = 0 M − 1 F ( u ) e j 2 π u x M F(u)=\frac 1 M\sum^{M-1}_{x=0}f(x)e^{-j\frac{2\pi ux}M}\\ f(x)=\sum^{M-1}_{u=0}F(u)e^{j\frac{2\pi ux}M} F(u)=M1x=0∑M−1f(x)e−jM2πuxf(x)=u=0∑M−1F(u)ejM2πux
因为 e j θ = cos θ + sin θ e^{j\theta}=\cos\theta+\sin\theta ejθ=cosθ+sinθ,离散傅里叶变换可以被写成:
F ( u ) = 1 M ∑ x = 0 M − 1 f ( x ) [ cos 2 π u x M − j sin 2 π u x M ] F(u)=\frac 1 M\sum^{M-1}_{x=0}f(x)\left[\cos\frac{2\pi ux}M-j\sin\frac{2\pi ux}M\right] F(u)=M1x=0∑M−1f(x)[cosM2πux−jsinM2πux]
- 频率(时间)域: F ( u ) F(u) F(u)的值所在的域( u u u 的值);因为 u u u决定了变换分量的频率。
- 频率(时间)分量: F ( u ) F(u) F(u)的 M M M个项中的每一个。
极坐标表示(谱=函数)
F ( u ) = ∣ F ( u ) ∣ e j ϕ ( u ) F(u)=\vert F(u)\vert e^{j\phi(u)} F(u)=∣F(u)∣ejϕ(u)
- F ( u ) = [ R ( u ) 2 + I ( u ) 2 ] 1 2 F(u)=\left[R(u)^2+I(u)^2\right]^{\frac 1 2} F(u)=[R(u)2+I(u)2]21: 幅度谱,用于描述频率成分的强度。
- ϕ ( u ) = tan − 1 ( I ( u ) R ( u ) ) \phi(u)=\tan^{-1}\left(\frac{I(u)}{R(u)}\right) ϕ(u)=tan−1(R(u)I(u)) :相位谱,用于描述频率成分的相位信息。
- R ( u ) R(u) R(u)是频域函数的实部, I ( u ) I(u) I(u)是频域函数的虚部。
功率谱: P ( u ) = ∣ F ( u ) ∣ 2 P(u)=\vert F(u)\vert^2 P(u)=∣F(u)∣2, 用于量化图像在不同频率处的能量分布,是幅度谱的平方。
2-D Discrete Fourier Transform

F ( u , v ) = 1 M N ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) e − j 2 π ( u x M + v y N ) f ( x , y ) = ∑ x = 0 M − 1 ∑ y = 0 N − 1 F ( u , v ) e j 2 π ( u x M + v y N ) F(u,v)=\frac{1}{MN}\sum^{M-1}_{x=0}\sum^{N-1}_{y=0}f(x,y)e^{-j2\pi\left(\frac{ux}M+\frac{vy}N\right)}\\ f(x,y)=\sum^{M-1}_{x=0}\sum^{N-1}_{y=0}F(u,v)e^{j2\pi\left(\frac{ux}M+\frac{vy}N\right)} F(u,v)=MN1x=0∑M−1y=0∑N−1f(x,y)e−j2π(Mux+Nvy)f(x,y)=x=0∑M−1y=0∑N−1F(u,v)ej2π(Mux+Nvy)
- ∣ F ( u , v ) ∣ = [ R 2 ( u , v ) 2 + I 2 ( u , v ) ] 1 2 \vert F(u,v)\vert=\left[R^2(u,v)^2+I^2(u,v)\right]^{\frac 1 2} ∣F(u,v)∣=[R2(u,v)2+I2(u,v)]21: 幅度谱
- ϕ ( u , v ) = tan − 1 [ I ( u , v ) R ( u , v ) ] \phi(u,v)=\tan^{-1}\left[\frac{I(u,v)}{R(u,v)}\right] ϕ(u,v)=tan−1[R(u,v)I(u,v)]: 相位谱
- P ( u , v ) = ∣ F ( u , v ) ∣ 2 P(u,v)=\vert F(u,v)\vert^2 P(u,v)=∣F(u,v)∣2: 功率谱
二维离散傅里叶变换的性质(Properties of 2-D DFT)
-
平移(shifting):
-
时间平移 (Time-shifting):图像在空间域中的平移(时移)导致幅度谱不变、相位谱变化。
J [ f ( x − x 0 , y − y 0 ) ] = F ( u , v ) e − j 2 π ( u x 0 M + v y 0 N ) f ( x − x 0 , y − y 0 ) = ∑ x = 0 M − 1 ∑ y = 0 N − 1 F ( u , v ) e j 2 π ( u x − u x 0 M + v y − v y 0 N ) = ∑ x = 0 M − 1 ∑ y = 0 N − 1 F ( u , v ) e j 2 π ( u x M + v y N ) e − j 2 π ( u x 0 M + v y 0 N ) J [ f ( x − x 0 , y − y 0 ) ] = F ( u , v ) e − j 2 π ( u x 0 M + v y 0 N ) \begin{align} \mathfrak{J}[f(x-x_0, y-y_0)]&= F(u, v)e^{-j2\pi\left(\frac{ux_0}{M} + \frac{vy_0}{N}\right)}\\ f(x-x_0,y-y_0)&=\sum^{M-1}_{x=0}\sum^{N-1}_{y=0}F(u,v)e^{j2\pi\left(\frac{ux-ux_0}M+\frac{vy-vy_0}N\right)}\\&=\sum^{M-1}_{x=0}\sum^{N-1}_{y=0}F(u,v)e^{j2\pi\left(\frac{ux}M+\frac{vy}N\right)}e^{-j2\pi\left(\frac{ux_0}{M} + \frac{vy_0}{N}\right)}\\ \mathfrak{J}[f(x-x_0, y-y_0)]&= F(u, v)e^{-j2\pi\left(\frac{ux_0}{M} + \frac{vy_0}{N}\right)} \end{align} J[f(x−x0,y−y0)]f(x−x0,y−y0)J[f(x−x0,y−y0)]=F(u,v)e−j2π(Mux0+Nvy0)=x=0∑M−1y=0∑N−1F(u,v)ej2π(Mux−ux0+Nvy−vy0)=x=0∑M−1y=0∑N−1F(u,v)ej2π(Mux+Nvy)e−j2π(Mux0+Nvy0)=F(u,v)e−j2π(Mux0+Nvy0) -
频率平移 (Frequency shifting):空间域中乘以一个复指数因子会导致频率平移。式2常用于将频域中心 (0, 0) 平移到图像中心 (如
fftshift操作)。
J [ f ( x , y ) e j 2 π ( u 0 x M + v 0 y N ) ] = F ( u − u 0 , v − v 0 ) J [ f ( x , y ) ( − 1 ) x + y ] = F ( u − M 2 , v − N 2 ) p r o o f . u 0 = M 2 , v 0 = N 2 J [ f ( x , y ) e j 2 π ( u 0 x M + v 0 y N ) ] = J [ f ( x , y ) e j π ( x + y ) ] = cos π ( x + y ) + j sin π ( x + y ) = ( − 1 ) x + y \mathfrak{J}[f(x, y)e^{j2\pi\left(\frac{u_0x}{M} + \frac{v_0y}{N}\right)}] = F(u-u_0, v-v_0)\\ \mathfrak{J}[f(x, y)(-1)^{x+y}] = F(u-\frac{M}{2}, v-\frac{N}{2})\\ proof.\ u_0=\frac M 2,v_0=\frac N2\\ \mathfrak{J}[f(x, y)e^{j2\pi\left(\frac{u_0x}{M} + \frac{v_0y}{N}\right)}] =\mathfrak{J}[f(x, y)e^{j\pi(x+y)}]=\cos {\pi(x+y)}+j\sin {\pi(x+y)}=(-1)^{x+y}\\ J[f(x,y)ej2π(Mu0x+Nv0y)]=F(u−u0,v−v0)J[f(x,y)(−1)x+y]=F(u−2M,v−2N)proof. u0=2M,v0=2NJ[f(x,y)ej2π(Mu0x+Nv0y)]=J[f(x,y)ejπ(x+y)]=cosπ(x+y)+jsinπ(x+y)=(−1)x+y
-
-
对称性(Symmetry):
- 平均值 (Average): F ( 0 , 0 ) = 1 M N ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) F(0, 0) = \frac{1}{MN}\sum_{x=0}^{M-1}\sum_{y=0}^{N-1}f(x, y) F(0,0)=MN1∑x=0M−1∑y=0N−1f(x,y) 是直流量,相当于中心点=平均值。
- 共轭对称性 (Conjugate Symmetric): F ( u , v ) = F ∗ ( − u , − v ) F(u, v) = F^*(-u, -v) F(u,v)=F∗(−u,−v)
- 对称性 (Symmetric): ∣ F ( u , v ) ∣ = ∣ F ( − u , − v ) ∣ |F(u, v)| = |F(-u, -v)| ∣F(u,v)∣=∣F(−u,−v)∣
-
分离性 (Separability): 二维傅里叶变换可以分解为两次一维傅里叶变换(行、列),这降低了计算复杂度,便于实现快速傅里叶变换(FFT)。
F ( u , v ) = 1 N ∑ y = 0 N − 1 [ 1 M ∑ x = 0 M − 1 f ( x , y ) e − j 2 π u x M ] e − j 2 π v y N F(u, v) = \frac{1}{N} \sum_{y=0}^{N-1} \left[\frac{1}{M} \sum_{x=0}^{M-1} f(x, y) e^{-j 2\pi \frac{ux}{M}}\right] e^{-j 2\pi \frac{vy}{N}} F(u,v)=N1y=0∑N−1[M1x=0∑M−1f(x,y)e−j2πMux]e−j2πNvy -
旋转 (Rotation):图像在空间域中的旋转会导致频域中相应的旋转。如果图像旋转了角度 θ 0 \theta_0 θ0,其频谱也旋转相同角度。
f ( r , θ + θ 0 ) ⟺ F ( ω , ϕ + θ 0 ) f(r, \theta + \theta_0)\iff F(\omega, \phi + \theta_0) f(r,θ+θ0)⟺F(ω,ϕ+θ0) -
周期性 (Periodicity): 离散傅里叶变换具有周期性,频域中的数据在 M × N M \times N M×N范围内重复。
f ( x , y ) = f ( x + M , y ) = f ( x , y + N ) = f ( x + M , y + N ) F ( u , v ) = F ( u + M , v ) = F ( u , v + N ) = F ( u + M , v + N ) f(x, y) = f(x + M, y) = f(x, y + N) = f(x + M, y + N)\\ F(u, v) = F(u + M, v) = F(u, v + N) = F(u + M, v + N) f(x,y)=f(x+M,y)=f(x,y+N)=f(x+M,y+N)F(u,v)=F(u+M,v)=F(u,v+N)=F(u+M,v+N) -
线性性 (Linearity): 傅里叶变换是线性运算,两个图像的加权组合在频域中仍是对应频域组合的加权和。
J [ a f ( x , y ) + b g ( x , y ) ] = a J [ f ( x , y ) ] + b J [ g ( x , y ) ] \mathfrak{J}[af(x, y) + bg(x, y)] = a\mathfrak{J}[f(x, y)] + b\mathfrak{J}[g(x, y)] J[af(x,y)+bg(x,y)]=aJ[f(x,y)]+bJ[g(x,y)] -
微分性 (Differentiation): 图像在空间域中的微分对应频域中的乘法运算。二阶微分对应 − 4 π 2 ( u 2 + v 2 ) -4\pi^2(u^2 + v^2) −4π2(u2+v2),与拉普拉斯算子相关。
J [ ∂ n f ( x , y ) ∂ x n ] = ( j 2 π u ) n J [ f ( x , y ) ] = ( j 2 π u ) n F ( u , v ) J [ ∇ 2 f ( x , y ) ] = − 4 π 2 ( u 2 + v 2 ) F ( u , v ) \mathfrak{J}\left[\frac{\partial^n f(x, y)}{\partial x^n}\right] = (j2\pi u)^n\mathfrak{J}[f(x, y)]= (j2\pi u)^n F(u,v)\\ \mathfrak{J}\left[\nabla^2 f(x, y)\right] = -4\pi^2(u^2 + v^2)F(u, v) J[∂xn∂nf(x,y)]=(j2πu)nJ[f(x,y)]=(j2πu)nF(u,v)J[∇2f(x,y)]=−4π2(u2+v2)F(u,v) -
卷积(Convolution): J [ f ( x , y ) ∗ g ( x , y ) ] = F ( u , v ) G ( u , v ) \mathfrak{J}[f(x, y) * g(x, y)] = F(u, v)G(u, v) J[f(x,y)∗g(x,y)]=F(u,v)G(u,v)
-
相关(Correlation): J [ f ( x , y ) ∘ g ( x , y ) ] = F ( u , v ) ⋅ G ∗ ( u , v ) \mathfrak{J}[f(x, y) \circ g(x, y)] = F(u, v) \cdot G^*(u, v) J[f(x,y)∘g(x,y)]=F(u,v)⋅G∗(u,v)
-
相似性 (Similarity): 图像在空间域中发生缩放时,频域数据会发生相反的缩放,并且幅度会按照缩放比例调整。
J [ f ( a x , b y ) ] = 1 ∣ a b ∣ F ( u a , v b ) \mathfrak{J}[f(ax, by)] = \frac{1}{|ab|} F\left(\frac{u}{a}, \frac{v}{b}\right) J[f(ax,by)]=∣ab∣1F(au,bv)

一些常用的傅里叶变换对 (FT Pairs)
-
单位冲激函数( δ \delta δ): δ ( x , y ) ↔ 1 \delta(x,y)\leftrightarrow 1 δ(x,y)↔1
δ \delta δ函数与其他函数卷积,就等于这个函数本身。
δ ( x ) ∗ g ( x ) ⟺ F ( δ ( x ) ) G ( x ) g ( x ) ⟺ 1 × G ( x ) \delta(x)*g(x)\iff F(\delta(x))G(x)\\ g(x)\iff 1\times G(x) δ(x)∗g(x)⟺F(δ(x))G(x)g(x)⟺1×G(x) -
高斯函数: 空间域是高斯函数,频率域仍是高斯函数,但与空间域的标准差成反比。
A 2 π σ 2 exp ( − 2 π 2 σ 2 ( x 2 + y 2 ) ) ⟺ A exp ( − u 2 + v 2 2 σ 2 ) A2\pi\sigma^2 \exp(-2\pi^2\sigma^2(x^2 + y^2))\iff A \exp\left(-\frac{u^2 + v^2}{2\sigma^2}\right) A2πσ2exp(−2π2σ2(x2+y2))⟺Aexp(−2σ2u2+v2)
高斯函数的FT仍是高斯函数,中心在 ( 0 , 0 ) (0,0) (0,0)频率。
exp ( − π ( x 2 + y 2 ) ) ⟺ exp ( − π ( u 2 + v 2 ) ) \exp(-\pi(x^2 + y^2))\iff\exp(-\pi(u^2 + v^2)) exp(−π(x2+y2))⟺exp(−π(u2+v2)) -
正弦函数: 空间域是正弦函数,频率域则是两个对称的冲激函数,分别位于 ( u 0 , v 0 ) , ( − u 0 , − v 0 ) (u_0,v_0),(-u_0,-v_0) (u0,v0),(−u0,−v0), 但幅度带有 j j j和相反的符号。
sin ( 2 π u 0 x + 2 π v 0 y ) ⟺ 1 2 j [ δ ( u + u 0 , v + v 0 ) − δ ( u − u 0 , v − v 0 ) ] \sin(2\pi u_0x + 2\pi v_0y)\iff\frac{1}{2} j \left[ \delta(u+u_0, v+v_0) - \delta(u-u_0, v-v_0) \right] sin(2πu0x+2πv0y)⟺21j[δ(u+u0,v+v0)−δ(u−u0,v−v0)] -
余弦函数: 空间域是余弦函数,频率域则是两个对称的冲激函数,分别位于 ( u 0 , v 0 ) , ( − u 0 , − v 0 ) (u_0,v_0),(-u_0,-v_0) (u0,v0),(−u0,−v0).
cos ( 2 π u 0 x + 2 π v 0 y ) ⟺ 1 2 [ δ ( u + u 0 , v + v 0 ) + δ ( u − u 0 , v − v 0 ) ] \cos(2\pi u_0x + 2\pi v_0y)\iff\frac{1}{2} \left[ \delta(u+u_0, v+v_0) + \delta(u-u_0, v-v_0) \right] cos(2πu0x+2πv0y)⟺21[δ(u+u0,v+v0)+δ(u−u0,v−v0)]
空间域中的正弦信号也在频域中产生两个对称的冲激,但其相位不同于余弦。
Filtering in the Frequency Domain
卷积定理: f ( x , y ) ∗ h ( x , y ) f(x, y) * h(x, y) f(x,y)∗h(x,y)与 F ( u , v ) H ( u , v ) F(u, v) H(u, v) F(u,v)H(u,v)组成傅里叶变换对。左边的表达式(空间域卷积)可以通过对右边表达式进行傅里叶反变换获得;右边的表达式可以通过对左式进行正向傅里叶变换获得。频率域的卷积被简化为空间域的乘法,反之亦然。
J [ f ( x , y ) ∗ h ( x , y ) ] = F ( u , v ) H ( u , v ) J [ f ( x , y ) h ( x , y ) ] = F ( u , v ) ∗ H ( u , v ) \mathfrak{J}[f(x, y) * h(x, y)]= F(u, v) H(u, v)\\ \mathfrak{J}[f(x, y)h(x, y)] =F(u, v)* H(u, v) J[f(x,y)∗h(x,y)]=F(u,v)H(u,v)J[f(x,y)h(x,y)]=F(u,v)∗H(u,v)
相关定理:
J [ f ( x , y ) ⋆ h ( x , y ) ] = F ∗ ( u , v ) H ( u , v ) J [ f ∗ ( x , y ) h ( x , y ) ] = F ( u , v ) ⋆ H ( u , v ) J [ f ( x , y ) ⋆ f ( x , y ) ] = ∣ F ( u , v ) ∣ 2 J [ ∣ f ( x , y ) ∣ 2 ] = F ( u , v ) ⋆ F ( u , v ) \mathfrak{J}[f(x, y) \star h(x, y)]= F^*(u, v) H(u, v)\\ \mathfrak{J}[f^*(x, y)h(x, y)] =F(u, v)\star H(u, v)\\\\ \mathfrak{J}[f(x, y) \star f(x, y)]=\vert F(u, v) \vert^2\\ \mathfrak{J}[\vert f(x, y)\vert^2] =F(u, v)\star F(u, v) J[f(x,y)⋆h(x,y)]=F∗(u,v)H(u,v)J[f∗(x,y)h(x,y)]=F(u,v)⋆H(u,v)J[f(x,y)⋆f(x,y)]=∣F(u,v)∣2J[∣f(x,y)∣2]=F(u,v)⋆F(u,v)
伸缩性质:
J [ f ( a x , b y ) ] = 1 ∣ a b ∣ F ( u a , v b ) \mathfrak{J}[f(ax, by)]= \frac{1}{\vert ab\vert}F(\frac u a, \frac v b) J[f(ax,by)]=∣ab∣1F(au,bv)
【能量保持 · 帕斯瓦尔定理】如果离散的信号是一维的,对每个信号平方求和,再进行傅里叶变换,频域上也能得到一致的平方和。信号再时域和频域之间能量不变。
频域滤波
基本思想 :通过选择一个特定的滤波器传递函数 H ( u , v ) H(u, v) H(u,v)来修改图像的傅里叶变换 F ( u , v ) F(u, v) F(u,v)。
基于卷积定理的频域滤波实现:
- 通过傅里叶变换将图像从空间域 f ( x , y ) f(x, y) f(x,y)转换到频域 F ( u , v ) F(u, v) F(u,v)。
- 在频域中对傅里叶变换结果 F ( u , v ) F(u, v) F(u,v)乘以滤波器 H ( u , v ) H(u, v) H(u,v)。
- 通过傅里叶逆变换将结果转换回空间域,得到滤波后的图像 J − 1 { H ( u , v ) F ( u , v ) } \mathfrak{J}^{-1}\{H(u, v)F(u, v)\} J−1{H(u,v)F(u,v)}。
Wraparound Error(混叠误差): 在频域卷积时,完整信号可以被切分成多个简单信号相加。那么这些简单信号在交叠处:究竟是取信号1的值、还是取信号2的值呢?
解决方法: 对图像进行零填充 (Padding),扩展信号范围,避免非零部分的干扰。就是改变简单信号的周期,让其周期=完整信号的周期,然后会有一些部分,然后全部=0(这个就叫零填充)。
从空域滤波器中获取频域滤波器(Obtaining Frequency Domain Filters from Spatial Filters)
**Q: **Why?
A: 1.效率 2.有意义的比较
理想低通滤波器(ILPF):
H ( u , v ) = { 1 , D ( u , v ) ≤ D 0 0 , D ( u , v ) > D 0 H(u,v)=\begin{cases} 1, \quad D(u,v)\le D_0\\ 0,\quad D(u,v)> D_0\\ \end{cases} H(u,v)={1,D(u,v)≤D00,D(u,v)>D0
其中 D ( u , v ) D(u,v) D(u,v)是从点 ( u , v ) (u,v) (u,v)到频率矩阵中心 ( 0 , 0 ) (0,0) (0,0)的距离:
D ( u , v ) = ( u − M 2 ) 2 + ( v − N 2 ) 2 D(u,v)=\sqrt{\left(u-\frac M 2\right)^2+\left(v-\frac N 2\right)^2} D(u,v)=(u−2M)2+(v−2N)2

巴斯沃斯低通滤波器(Butterworth Lowpass Filters, BLPFs):
H ( u , v ) = 1 1 + [ D ( u , v ) D 0 ] 2 n H(u,v)=\frac{1}{1+\left[\frac{D(u,v)}{D_0}\right]^{2n}} H(u,v)=1+[D0D(u,v)]2n1
随n增大,会越来越趋近于理想的低通滤波器。当 D ( u , v ) = D 0 , D ( u , v ) D 0 = 1 , 1 n = 1 D(u,v)=D_0,\frac{D(u,v)}{D_0}=1,1^n=1 D(u,v)=D0,D0D(u,v)=1,1n=1,因此永远过0.5的点。

高斯低通滤波器( Gaussian Lowpass Filters, GLPFs)
H ( u , v ) = exp { − D 2 ( u , v ) 2 D 0 2 } H(u,v)=\exp\{\frac{-D^2(u,v)}{2D^2_0}\} H(u,v)=exp{2D02−D2(u,v)}

频率锐化滤波器(Sharpening Frequency Domain Filters)
通用高通频域滤波器:
H h p ( u , v ) = 1 − H l p ( u , v ) H_{hp}(u,v)=1-H_{lp}(u,v) Hhp(u,v)=1−Hlp(u,v)
| 高通滤波器 | 公式 |
|---|---|
| 理想高通滤波器 | H ( u , v ) = { 0 if D ( u , v ) ≤ D 0 1 if D ( u , v ) > D 0 H(u, v) = \begin{cases} 0 & \text{if } D(u, v) \leq D_0 \\ 1 & \text{if } D(u, v) > D_0 \end{cases} H(u,v)={01if D(u,v)≤D0if D(u,v)>D0 |
| 巴斯沃斯高通滤波器 | H ( u , v ) = 1 1 + [ D 0 / D ( u , v ) ] 2 n H(u, v) = \frac{1}{1 + [D_0/D(u, v)]^{2n}} H(u,v)=1+[D0/D(u,v)]2n1 |
| 高斯高通滤波器 | H ( u , v ) = 1 − e − D 2 ( u , v ) / 2 D 0 2 H(u, v) = 1 - e^{-D^2(u, v)/2D_0^2} H(u,v)=1−e−D2(u,v)/2D02 |
(Sharpening Frequency Domain Filters)
通用高通频域滤波器:
H h p ( u , v ) = 1 − H l p ( u , v ) H_{hp}(u,v)=1-H_{lp}(u,v) Hhp(u,v)=1−Hlp(u,v)
| 高通滤波器 | 公式 |
|---|---|
| 理想高通滤波器 | H ( u , v ) = { 0 if D ( u , v ) ≤ D 0 1 if D ( u , v ) > D 0 H(u, v) = \begin{cases} 0 & \text{if } D(u, v) \leq D_0 \\ 1 & \text{if } D(u, v) > D_0 \end{cases} H(u,v)={01if D(u,v)≤D0if D(u,v)>D0 |
| 巴斯沃斯高通滤波器 | H ( u , v ) = 1 1 + [ D 0 / D ( u , v ) ] 2 n H(u, v) = \frac{1}{1 + [D_0/D(u, v)]^{2n}} H(u,v)=1+[D0/D(u,v)]2n1 |
| 高斯高通滤波器 | H ( u , v ) = 1 − e − D 2 ( u , v ) / 2 D 0 2 H(u, v) = 1 - e^{-D^2(u, v)/2D_0^2} H(u,v)=1−e−D2(u,v)/2D02 |
相关文章:
图像处理-Ch4-频率域处理
Ch4 频率域处理(Image Enhancement in Frequency Domain) FT :将信号表示成各种频率的正弦信号的线性组合。 频谱: ∣ F ( u , v ) ∣ [ R 2 ( u , v ) I 2 ( u , v ) ] 1 2 |F(u, v)| \left[ R^2(u, v) I^2(u, v) \right]^{\frac{1}{2}} ∣F(u,v)…...

WPS工具栏灰色怎么办
WPS离线不登录,开启工具栏等相关功能 当你在使用WPS的过程中,若因网络问题或其他特殊原因,导致无法登录使用WPS时,可根据以下步骤开启离线兼容模式,开启此模式后,可在未登录的状态下,激活并使用…...

渐开线齿轮和摆线齿轮有什么区别?
摆线齿形与渐开线齿形的区别 虽然在比对这两种齿形,但有一个事情希望大家注意:渐开线齿轮只是摆线齿轮的一个特例。 (1)摆线齿形的压力角在啮合开始时最大,在齿节点减小到零,在啮合结束时再次增大到最大…...

vulnhub靶场-matrix-breakout-2-morpheus攻略(截止至获取shell)
扫描出ip为192.168.121.161 访问该ip,发现只是一个静态页面什么也没有 使用dir dirsearch 御剑都只能扫描到/robots.txt /server-status 两个页面,前者提示我们什么也没有,后面两个没有权限访问 扫描端口,存在81端口 访问&#x…...
应用高次、有理代数式为AI生成亚对称图像
原创:daode1212(daode3056) 本文定义不完全对称的图像叫亚对称图像,因为全对称的太过机械,不符合人工的特点,本人基于二元高次的有理式,生成时引入N个随机数分A,B两个组,再通过指针对画布所有像素高速扫描生…...

潜在狄利克雷分配LDA 算法深度解析
引言 潜在狄利克雷分配(Latent Dirichlet Allocation, LDA)是一种广泛应用于文本挖掘和信息检索领域的主题模型。它能够从文档集合中自动发现隐藏的主题结构,为理解大规模文本数据提供了强有力的工具。本文将着重讲解 LDA 的核心理论&#x…...

[x86 ubuntu22.04]双触摸屏的触摸事件都响应在同一个触摸屏上
1 问题描述 CPU:G6900E OS:ubuntu22.04 Kernel:6.8.0-49-generic 系统下有两个一样的 edp 触摸屏,两个触摸屏的触摸事件都响应在同一个 edp 屏幕上。 2 解决过程 使用“xinput”命令查看输入设备,可以看到只有一个 to…...

重温设计模式--代理模式
文章目录 定义UML图代理模式主要有以下几种常见类型:代理模式涉及的主要角色有:C 代码示例 定义 代理模式(Proxy Pattern)属于结构型设计模式,它为其他对象提供一种代理以控制对这个对象的访问。 通过引入代理对象&am…...

一些elasticsearch重要概念与配置参数
ES 是在 lucene 的基础上进行研发的,隐藏了 lucene 的复杂性,提供简单易用的 RESTful Api接口。ES 的分片相当于 lucene 的索引。 Node 节点的几种部署实例 实例一: 只用于数据存储和数据查询,降低其资源消耗率 node.master: false node.da…...

leetcode 面试经典 150 题:螺旋矩阵
链接螺旋矩阵题序号54题型二维数组(矩阵)解题方法模拟路径法难度中等熟练度✅✅✅ 题目 给你一个 m 行 n 列的矩阵 matrix ,请按照 顺时针螺旋顺序 ,返回矩阵中的所有元素。 示例 1: 输入:matrix [[1,2,3…...

JAVA AOP简单实践(基于SpringBoot)
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…...
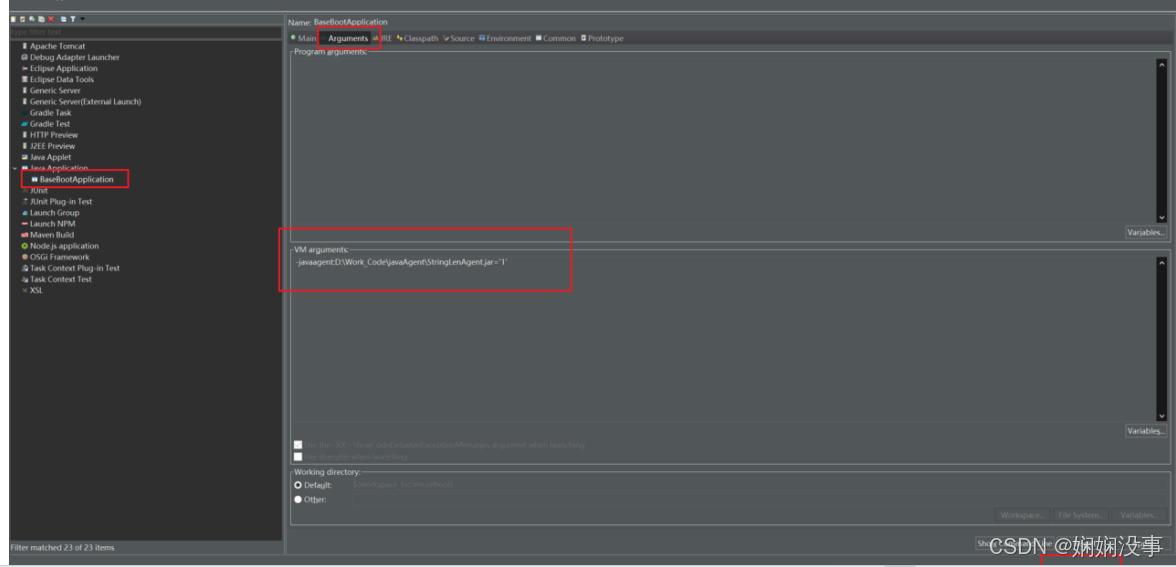
java agent的使用【通俗易懂版】
一、静态代理Agent 1.生成Agent的jar包 (1)创建Agent项目,引入javassist.jar包 (2)编写premain方法 import java.lang.instrument.Instrumentation;public class Agent1 {public static void premain(Stri…...

大模型学习指南
随着人工智能的迅猛发展,大模型成为了技术前沿的璀璨明星。踏入大模型学习领域,需要在多个关键方面下功夫。 扎实的数学功底是基石。线性代数为理解多维数据、矩阵运算提供支撑,像大模型中权重矩阵的处理就离不开它;概率论与数理…...
(附带源码))
单片机:实现定时器中断(数码管读秒+LED闪烁)(附带源码)
单片机实现定时器中断:数码管读秒与LED闪烁 在单片机项目中,定时器中断是一个常见的应用,用于实现定时任务,例如定时更新显示或控制周期性事件。本文将介绍如何使用定时器中断实现数码管读秒和LED闪烁功能。通过使用定时器中断&a…...

STM32单片机芯片与内部33 ADC 单通道连续DMA
目录 一、ADC DMA配置——标准库 1、ADC配置 2、DMA配置 二、ADC DMA配置——HAL库 1、ADC配置 2、DMA配置 三、用户侧 1、DMA开关 (1)、标准库 (2)、HAL库 2、DMA乒乓 (1)、标准库 ÿ…...

【0376】Postgres内核 分配 last safe MultiXactId
上一篇: 【0375】Postgres内核 XLOG 之 设置下一个待分配 MultiXactId 和 offset 文章目录 1. 最后一个安全的 MultiXactId1.1 计算 multi wrap limit1.2 计算 multi stop limit1.3 计算 multi warn limit1.4 计算 multi vacuum limit2. 初始化 MultiXactState 成员3. 完成 mu…...

php时间strtotime函数引发的问题 时间判断出错
在 PHP 中,strtotime 函数能处理的最大时间范围取决于您的系统和 PHP 版本。 一般来说,它可以处理的时间范围从 1901 年 12 月 13 日到 2038 年 1 月 19 日。超过这个范围可能会导致不可预测的结果或错误。 如果您需要处理更大范围的时间,可能…...

Kibana:LINUX_X86_64 和 DEB_X86_64两种可选下载方式的区别
最近需要在vm(操作系统是 Ubuntu 22.04.4 LTS,代号 Jammy。这是一个基于 x86_64 架构的 Linux 发行版)上安装一个7.17.8版本的Kibana,并且不采用docker方式。 在下载的时候发现有以下两个选项,分别是 LINUX_X86_64 和 …...

【LeetCode每日一题】 LeetCode 151.反转字符串中的单词
LeetCode 151.反转字符串中的单词 题目描述 给你一个字符串 s ,请你反转字符串中单词的顺序。 单词 是由非空格字符组成的字符串。s 中使用至少一个空格将字符串中的 单词 分隔开。 返回 单词 顺序颠倒且 单词 之间用单个空格连接的结果字符串。 注意:…...

gitlab克隆仓库报错fatal: unable to access ‘仓库地址xxxxxxxx‘
首次克隆仓库,失效了,上网查方法,都说是网络代理的问题,各种清理网络代理后都无效,去问同事: 先前都是直接复制的网页url当做远端url,或者点击按钮‘使用http克隆’ 这次对于我来说有效的远端u…...

数据主权时代:WeChatMsg如何让你的聊天记录真正属于你
数据主权时代:WeChatMsg如何让你的聊天记录真正属于你 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/WeCha…...
)
使用 Docker 部署 Neko 自托管虚拟浏览器(Firefox)
使用 Docker 部署 Neko 自托管虚拟浏览器(Firefox) Neko 是一个基于 WebRTC 的自托管虚拟浏览器环境,支持多人协作、远程访问和控制。本文将指导你通过 Docker 快速部署 Neko 并完成基本配置。 1. 拉取 Neko 镜像 首先拉取官方提供的 Fire…...

谐振式与耦合式WPT系统中收发线圈的等效电路建模与性能对比
1. 无线能量传输的基本原理 想象一下,你正在给手机充电,但不需要插线,只要把手机放在桌面上就能自动充上电。这种看似科幻的场景,正是无线能量传输(WPT)技术带来的现实。作为从业十多年的工程师,我见证了这个领域从实验…...

如何突破AI编程工具的设备限制:go-cursor-help开源工具深度解析
如何突破AI编程工具的设备限制:go-cursor-help开源工具深度解析 【免费下载链接】go-cursor-help 解决Cursor在免费订阅期间出现以下提示的问题: Your request has been blocked as our system has detected suspicious activity / Youve reached your trial reques…...

WSL2 Arch Linux快速安装Docker指南
1. 前言 在 WSL2 中使用 Arch Linux 时,Docker 是一个常用的工具。本文基于 Arch Linux Wiki 和相关技术资料,整理了完整的 Docker 安装流程,帮助读者快速完成配置。 2. 下载与启动设置 Arch Linux 的软件仓库已包含 Docker,可直接…...

终极指南:如何实现北京理工大学校园网自动登录与断线重连
终极指南:如何实现北京理工大学校园网自动登录与断线重连 【免费下载链接】BIT-srun-login-script 北京理工大学深澜校园网登录脚本,以实现命令行登录或者断线重连等,仅提供登录功能 项目地址: https://gitcode.com/gh_mirrors/bi/BIT-srun…...

std::shared_ptr 复习
一、std::shared_ptr 概述 std::shared_ptr 是 C11 引入的智能指针,它共享对所管理对象的所有权,即多个 shared_ptr 可以指向同一个对象。当最后一个 shared_ptr 离开作用域或被重置时,它会自动释放所管理的对象。 核心特性 共享所有权&#…...

Python数据分析环境部署:Anaconda与Phi-3-mini协作指南
Python数据分析环境部署:Anaconda与Phi-3-mini协作指南 1. 为什么选择这个组合? 在开始动手之前,我们先聊聊为什么Anaconda和Phi-3-mini是数据科学家的好搭档。Anaconda就像是一个瑞士军刀,把Python环境管理和包依赖这些麻烦事都…...

DTime嵌入式日期时间库:零依赖、确定性、全周期格里高利历计算
1. DTime库概述:嵌入式系统中的日期时间服务设计与实现在嵌入式开发实践中,RTC(实时时钟)硬件模块虽能提供秒级精度的时间计数,但其寄存器通常仅存储BCD或二进制格式的年、月、日、时、分、秒字段,不直接支…...

用Qwen3-Embedding-0.6B做文本分类:实战教程与代码分享
用Qwen3-Embedding-0.6B做文本分类:实战教程与代码分享 1. 引言 文本分类是自然语言处理中最基础也最实用的任务之一。无论是新闻分类、情感分析,还是垃圾邮件识别,都需要将文本准确地归入预定义的类别。传统的文本分类方法依赖人工特征工程…...