PointPillars:数据预处理
在 PointPillars 算法中,将点云划分为点柱(Pillars)是核心步骤之一,用于将稀疏点云数据转换为规则的张量表示,方便后续 2D 卷积操作。以下是点云划分为点柱的具体方法和实现步骤:
1. 点云划分为网格
将 3D 空间划分为规则的网格,形成柱状区域(Pillars)。
操作步骤:
-
定义网格范围和分辨率:
- 确定点云的空间范围,例如:
X min , X max , Y min , Y max , Z min , Z max X_{\text{min}}, X_{\text{max}}, Y_{\text{min}}, Y_{\text{max}}, Z_{\text{min}}, Z_{\text{max}} Xmin,Xmax,Ymin,Ymax,Zmin,Zmax - 设置网格分辨率(Pillar 尺寸):
Δ X , Δ Y \Delta X, \Delta Y ΔX,ΔY
例如,每个 Pillar 的大小为 0.16 × 0.16 m 0.16 \times 0.16 \, \text{m} 0.16×0.16m。
- 确定点云的空间范围,例如:
-
计算网格索引:
- 对每个点 ( x , y , z ) (x, y, z) (x,y,z),计算其在网格中的索引:
u = ⌊ x − X min Δ X ⌋ , v = ⌊ y − Y min Δ Y ⌋ u = \lfloor \frac{x - X_{\text{min}}}{\Delta X} \rfloor, \quad v = \lfloor \frac{y - Y_{\text{min}}}{\Delta Y} \rfloor u=⌊ΔXx−Xmin⌋,v=⌊ΔYy−Ymin⌋ - u , v u, v u,v 分别是点在 X X X 和 Y Y Y 方向上的网格索引。
- 对每个点 ( x , y , z ) (x, y, z) (x,y,z),计算其在网格中的索引:
2. 构建 Pillar 数据结构
每个 Pillar 中包含若干点的特征(点云数据是稀疏的,因此部分 Pillar 可能没有点)。
操作步骤:
-
点分组:
- 将所有点根据其网格索引分配到对应的 Pillar 中。
- 例如,第 ( u , v ) (u, v) (u,v) 个 Pillar 包含所有满足条件的点:
P pillar ( u , v ) = { ( x , y , z , i ) ∣ 点的索引为 ( u , v ) } P_{\text{pillar}}(u, v) = \{ (x, y, z, i) \mid \text{点的索引为 } (u, v) \} Ppillar(u,v)={(x,y,z,i)∣点的索引为 (u,v)}
-
固定点数量:
- 为了适配神经网络,每个 Pillar 中的点数量固定为 N max N_{\text{max}} Nmax:
- 如果点数超过 N max N_{\text{max}} Nmax,随机采样。
- 如果点数不足 N max N_{\text{max}} Nmax,用零点填充。
- 为了适配神经网络,每个 Pillar 中的点数量固定为 N max N_{\text{max}} Nmax:
-
特征提取:
对每个点提取以下特征:- ( x , y , z , i ) (x, y, z, i) (x,y,z,i):点的原始坐标和反射强度。
- 相对坐标(相对于 Pillar 中心的偏移量):
Δ x = x − x pillar center , Δ y = y − y pillar center \Delta x = x - x_{\text{pillar center}}, \quad \Delta y = y - y_{\text{pillar center}} Δx=x−xpillar center,Δy=y−ypillar center
-
形成固定维度的张量:
- 对每个 Pillar,构造 N max × D N_{\text{max}} \times D Nmax×D 的特征矩阵,其中 D D D 是特征维度(例如,原始坐标 + 相对坐标 + 强度)。
3. BEV (Bird’s Eye View) 特征图
将所有 Pillar 的特征投影到 BEV 平面,形成伪影像特征图。
操作步骤:
-
初始化 BEV 特征图:
- 创建一个固定大小的张量 ( H , W , C ) (H, W, C) (H,W,C),对应网格的高度、宽度和通道数。
- H = X max − X min Δ X H = \frac{X_{\text{max}} - X_{\text{min}}}{\Delta X} H=ΔXXmax−Xmin
- W = Y max − Y min Δ Y W = \frac{Y_{\text{max}} - Y_{\text{min}}}{\Delta Y} W=ΔYYmax−Ymin
- 创建一个固定大小的张量 ( H , W , C ) (H, W, C) (H,W,C),对应网格的高度、宽度和通道数。
-
填充特征图:
- 对于每个 Pillar,将其特征向量映射到特定网格单元的通道维度中。
-
零填充:
- 如果某些网格单元没有对应的 Pillar,用零填充。
代码实现示例
以下是一个简单的 Python 实现框架:
import numpy as npdef create_pillars(point_cloud, grid_size, pillar_size, max_points_per_pillar):"""将点云划分为点柱 (Pillars) 并提取特征。Args:point_cloud: (N, 4) 点云数据,包含 (x, y, z, intensity)grid_size: [x_min, x_max, y_min, y_max]pillar_size: [pillar_x_size, pillar_y_size]max_points_per_pillar: 每个 Pillar 的最大点数Returns:pillars: (num_pillars, max_points_per_pillar, feature_dim)"""x_min, x_max, y_min, y_max = grid_sizepillar_x_size, pillar_y_size = pillar_size# 筛选点云范围内的点mask = (point_cloud[:, 0] >= x_min) & (point_cloud[:, 0] < x_max) & \(point_cloud[:, 1] >= y_min) & (point_cloud[:, 1] < y_max)points = point_cloud[mask]# 计算网格索引x_indices = np.floor((points[:, 0] - x_min) / pillar_x_size).astype(int)y_indices = np.floor((points[:, 1] - y_min) / pillar_y_size).astype(int)# 按索引分组点num_pillars = (x_max - x_min) // pillar_x_size * (y_max - y_min) // pillar_y_sizepillars = np.zeros((num_pillars, max_points_per_pillar, 7)) # [x, y, z, intensity, delta_x, delta_y, delta_z]for i, (x_idx, y_idx) in enumerate(zip(x_indices, y_indices)):pillar_idx = x_idx * y_max + y_idx # Pillar 的一维索引if len(pillars[pillar_idx]) < max_points_per_pillar:delta_x = points[i, 0] - (x_idx * pillar_x_size + pillar_x_size / 2)delta_y = points[i, 1] - (y_idx * pillar_y_size + pillar_y_size / 2)pillars[pillar_idx].append([*points[i, :4], delta_x, delta_y, points[i, 2]])return pillars
实践优化
- GPU 加速:使用 CUDA 或 TensorFlow/PyTorch 操作处理点云。
- 稀疏优化:利用稀疏张量库减少计算成本。
- 并行化:在点划分和特征提取阶段进行并行处理。
相关文章:

PointPillars:数据预处理
在 PointPillars 算法中,将点云划分为点柱(Pillars)是核心步骤之一,用于将稀疏点云数据转换为规则的张量表示,方便后续 2D 卷积操作。以下是点云划分为点柱的具体方法和实现步骤: 1. 点云划分为网格 将 3D…...

node.js的异步工作之---回调函数与回调地狱
回调函数:在 Node.js 中,很多 API 都是异步的,通常通过回调函数来处理操作完成后的结果。这种回调模式虽然非常高效,但会导致代码逐渐变得难以维护,尤其是当有多个异步操作嵌套时(即回调地狱)。…...

Mac Android studio 升级LadyBug 版本,所产生的bug
当Build 出现,这样的文字以后: Your build is currently configured to use incompatible Java 21.0.3 and Gradle 7.3.3. Cannot sync the project. We recommend upgrading to Gradle version 8.9. The minimum compatible Gradle version is 8.5. …...

stm32 hex文件烧写
STM32的HEX文件烧写是将编译后的程序代码(以HEX格式存储)下载到STM32单片机中的过程。以下是对STM32 HEX文件烧写的详细解释: 一、HEX文件简介 HEX文件,即Intel HEX文件,是一种由文本行组成的ASCII文件,每…...

【编译原理】编译原理知识点汇总·属性文法和语法制导翻译
🌈 个人主页:十二月的猫-CSDN博客 🔥 系列专栏: 🏀编译原理_十二月的猫的博客-CSDN博客 💪🏻 十二月的寒冬阻挡不了春天的脚步,十二点的黑夜遮蔽不住黎明的曙光 目录 1. 前言 2. …...

【unity c#】深入理解string,以及不同方式构造类与反射的性能测试(基于BenchmarkDotNet)
出这篇文章的主要一个原因就是ai回答的性能差异和实际测试完全不同,比如说是先获取构造函数再构造比Activator.CreateInstance(type)快,实际却相反 对测试结果的评价基于5.0,因为找不到unity6确切使用的net版本,根据c#9推测是net5…...
:创建和管理任务 Task)
VSCode 插件开发实战(八):创建和管理任务 Task
前言 VSCode 的扩展能力使得开发者能够根据个人需求定制工作环境,自定义插件和任务管理是 VSCode 强大功能的一部分,通过这些功能,开发者可以自动化常见工作流,简化日常开发任务,提高整体开发效率。本文将详细介绍如何…...

在 Node.js 中正确处理 `async/await` 及数组迭代
在使用 Node.js 开发应用程序时,我们常常需要处理异步操作。例如,当我们从数据库获取数据、调用外部API或执行文件读取时,这些操作都可能需要一些时间才能完成。在这种情况下,我们通常会使用 async/await 语法来简化异步编程的复杂…...

本科阶段最后一次竞赛Vlog——2024年智能车大赛智慧医疗组准备全过程——13使用Resnet-Bin
本科阶段最后一次竞赛Vlog——2024年智能车大赛智慧医疗组准备全过程——13使用Resnet-Bin 根据前面的内容,目前已经可以获取到resnet的bin模型 1 .Resnet的bin测试 这里给大家一个测试视频里面黑线的demo,大家可以用来测试自己的黑线识别精度 …...

FFmpeg第三话:FFmpeg 视频解码详解
FFmpeg 探索之旅 一、FFmpeg 简介与环境搭建 二、FFmpeg 主要结构体剖析 三、FFmpeg 视频解码详解 FFmpeg第三话:FFmpeg 视频解码详解 FFmpeg 探索之旅前言一、视频解码基础二、FFmpeg 关键 API 深度剖析(一)avformat_open_input()ÿ…...

解决 vue3 中 echarts图表在el-dialog中显示问题
原因: 第一次点开不显示图表,第二次点开虽然显示图表,但是图表挤在一起,页面检查发现宽高只有100px,但是明明已经设置样式宽高100% 这可能是由于 el-dialog 还没有完全渲染完成,而你的 echarts 组件已经开始尝试渲染图…...

C++ OpenGL学习笔记(4、绘制贴图纹理)
相关链接: C OpenGL学习笔记(1、Hello World空窗口程序) C OpenGL学习笔记(2、绘制橙色三角形绘制、绿色随时间变化的三角形绘制) C OpenGL学习笔记(3、绘制彩色三角形、绘制彩色矩形) 通过前面…...
关于我的Java考试被老师挂掉的这件事......
目录 1.事情起源 2.问题出现 3.最后的考试结果 4.问题如何解决的 5.此件事情引发我的思考 1.事情起源 现在是2024-12-25中午的13:08分,我于今天上虞结束了这个学期的Java课程的学习,上午的课程内容就是开始,使用MVC实现对于题目要求的这…...

Websocket客户端从Openai Realtime api Sever只收到部分数据问题分析
目录 背景 分析 解决方案 背景 正常情况下,会从Openai Realtime api Sever收到正常的json数据,但是当返回音频数据时,总会返回非json数据。这是什么问题呢? 分析 期望的完整响应数据如下: {"session": {"inp…...

Unity 6 中的新增功能
Unity 6 是 Unity 的最新版本。 一、编辑器和工作流程 Unity 6 中引入的更改 在 Linux 上实现了将文件和资源从 Unity 拖放到外部应用程序的功能。将 Asset Manager for Unity 包添加到 Package Manager > Services > Content Management 部分中。此包允许用户轻松浏览…...
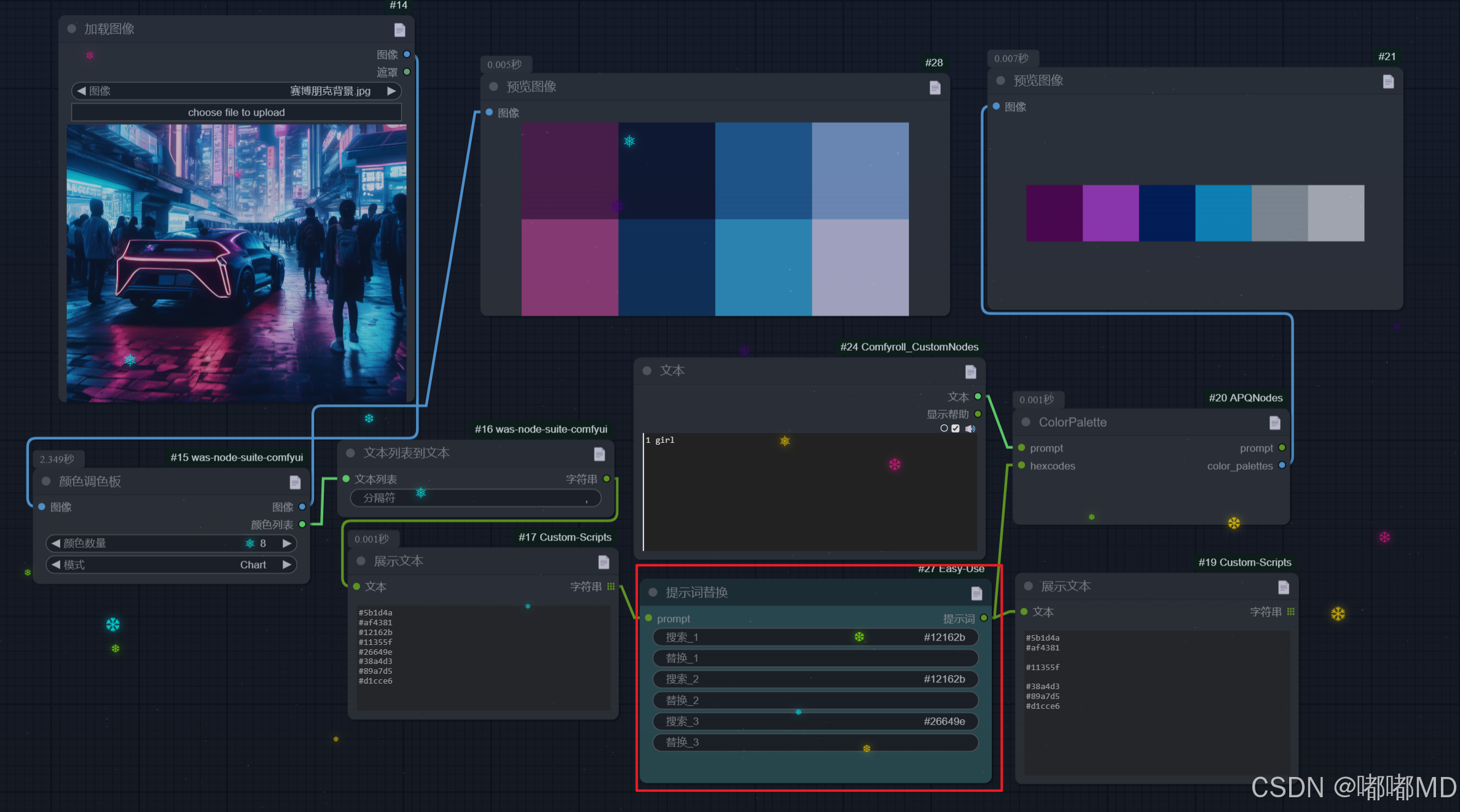
[ComfyUI]颜色提取插件,Flux专属,让出图更加可控
一、介绍 今天介绍这个好玩的插件 ComfyUI APQNodes,默认的Flux模型是无法理解准确的颜色代码。 而这个插件可以帮我忙将输入的十六进制颜色代码转换为 FLUX.1 Dev 已知的最相似的颜色名称(来自预先测试的 155 个颜色名称)。 所以就…...

【magic-dash】01:magic-dash创建单页面应用及二次开发
文章目录 一、magic-dash是什么1.1 安装1.2 使用1.2.1 查看内置项目模板1.2.2 生成指定项目模板1.2.3 查看当前magic-dash版本1.2.4 查看命令说明1.2.5 内置模板列表二、创建虚拟环境并安装magic-dash三、magic-dash单页工具应用开发3.1 创建单页面项目3.1.1 使用命令行创建单页…...

ChatGPT等大语言模型与水文水资源、水环境领域的深度融合
聚焦GPT等大语言模型与水文水资源领域的深度融合,通过系统化内容与实践案例,讲解如何高效完成时间序列分析、空间数据处理、水文模型优化以及智能科学写作等任务。同时,展示AI在高级机器学习模型开发、资源优化算法编程与模型微调中的最新应用…...

机器学习连载
1 机器学习基础知识 机器学习(Machine learning)是人工智能的子集,是实现人工智能的一种途径,但并不是唯一的途径。它是一门专门研究计算机怎样模拟或实现人类的学习行为,以获取新的知识或技能,重新组织已…...

linux查看天气预报
wttr.in 是一个简单且功能强大的命令行天气查询工具,实现了命令行下查看天气的炫酷效果。 开源地址:GitHub - chubin/wttr.in: :partly_sunny: The right way to check the weather 一. 什么是 wttr.in? wttr.in 是一个基于 Web 的命令行天…...

Swift学习笔记21-内存管理
// // main.swift // class21 内存管理(面试题为主,基本都过气了,没实践意义) // // Created by sakiko on 2026/4/7. //import Foundationprint("Hello, World!")//Swift 使用自动引用计数(ARCÿ…...

从零入门RAG:手把手教你构建大模型知识增强系统
本文深入解析RAG(检索增强生成)技术,阐述其解决大模型知识缺失、滞后及幻觉问题的核心优势,对比RAG与微调、Agent的适用场景,并拆解RAG的九步实现流程及四大核心组件(知识嵌入、向量数据库、检索器、生成器…...

国产信创库fio破坏主备库以及备份故障处理--惜分飞旁
一、各自优势和对比 这是检索出来的数据,据说是根据第三方评测与企业数据,三款产品在代码生成质量上各有侧重: 产品 语言优势 场景亮点 核心差异 百度 Comate C核心代码质量第一;Python首生成率达92.3% SQL生成准确率提升35%&…...

3款全能工具实现番茄小说跨平台离线阅读解决方案
3款全能工具实现番茄小说跨平台离线阅读解决方案 【免费下载链接】Tomato-Novel-Downloader 番茄小说下载器不精简版 项目地址: https://gitcode.com/gh_mirrors/to/Tomato-Novel-Downloader 番茄小说下载器是一款基于Rust开发的开源工具,旨在为用户提供无网…...

模拟解析:宽度数组 `[1,2,1]`,10个条目的 XRef 流
文章目录 模拟解析:宽度数组 [1,2,1],10个条目的 XRef 流一、设定场景二、解析代码核心部分(与之前相同)三、逐条解析(模拟 CPU 执行)辅助函数 GetVarInt 回顾条目0 (j0, objnum0)条目1 (j1, objnum1)条目2…...

【调度算法】NSGA-II:多目标优化中的精英策略与多样性保持
1. NSGA-II算法入门:多目标优化的破局利器 第一次接触多目标优化问题时,我盯着屏幕上相互冲突的指标曲线发愁——提高系统响应速度就会增加能耗,降低延迟又会导致吞吐量下降。直到遇到NSGA-II算法,这种"既要又要"的困境…...

FachuanHybridSystem 项目 Windows 完整安装启动文档
一步不丢,复制粘贴即可,下次直接照着跑 一、前置准备(仅第一次需要) 安装 Git:https://git-scm.com/download/win安装完 必须重启 PowerShell 二、完整一键流程(永久通用) 打开 PowerShell&am…...
)
不止于测距:用蓝桥杯开发板DIY一个简易超声波倒车雷达(含蜂鸣器报警)
从测距到实战:蓝桥杯开发板打造智能超声波雷达系统 第一次倒车时听到蜂鸣器急促的"滴滴"声,我意识到这个简单的超声波模块能做的远不止显示数字。作为参加过蓝桥杯的电子爱好者,我们手头的开发板其实蕴藏着解决实际问题的潜力——…...
)
Windows服务器上Veritas NetBackup 10.1保姆级安装指南(含用户权限配置避坑)
Windows服务器上Veritas NetBackup 10.1保姆级安装指南(含用户权限配置避坑) 在企业级数据备份领域,Veritas NetBackup一直是行业标杆级解决方案。作为一款成熟的企业级备份软件,NetBackup 10.1版本在Windows服务器环境下的安装配…...
--Advanced Impedance Analysis Techniques)
Sigrity Aurora (II)--Advanced Impedance Analysis Techniques
1. Sigrity Aurora阻抗分析的核心价值 在高速PCB设计领域,阻抗控制就像给信号修高速公路。想象一下,当你的信号以GHz频率在电路板上飞驰时,突然遇到路面凹凸不平(阻抗突变),信号完整性就会像失控的赛车一样…...