数据结构复习 (二叉查找树,高度平衡树AVL)
1.二叉查找树:
为了更好的实现动态的查找(可以插入/删除),并且不超过logn的时间下达成目的
定义: 二叉查找树(亦称二叉搜索树、二叉排序树)是一棵二叉树,其各结点关键词互异,且中根序列按其关键词递增排列。
等价描述: 二叉查找树中任一结点P,其左子树中结点的关键词都小于P的关键词,右子树中结点的关键词都大于P的关键词,且结点P的左右子树也都是二叉查找树。
节点:
BTSTreenode,有左右子树,有键值
有的操作是:
查找,插入和删除,
其他的创建和排序都可以通过上述完成
1,查找:
通过和当前的节点比较大小,来确定之后是:F.返回答案S.去更小的左边,T.去更大的右边
BSTnode* Search(BSTnode* root, int K){
if (root == NULL || root->key == K) return root;
if (K < root->key) return Search(root->left, K);
else return Search(root->right, K);
}
2,插入
根据和左右比较的方法来选择左边还是右边插入,但是不会插入相同的节点
可以引用实现,也可以是返回值实现
引用:
void insert(node*& root,int k){
If(root==NULL||root->val==k){
root=new node(k);
Return;
}
If(k>root->k)insert(root->left,k);
Else insert(root->right,k);
}
返回:
node* insert(node* root,int k){
If(root==NULL)return new node(k);
If(root->val==k)return root;
If(root->val>k)root->right=insert(root->right,k);
Else root->left=insert(root->left,k);
Return root;
}
3,删除,就是通过查找,然后判断:
,没有子树,直接删除
,有一个子树,直接上提
,两个子树,让右边最小的节点s上提到当前位置,之后删除S
void remove(BSTnode* &root, int K) {
if(root==NULL) return;
if(K<root->key) remove(root->left, K); //在左子树删K
else if(K>root->key) remove(root->right, K); //在右子树删K
else if(root->left!=NULL && root->right!=NULL){ //非根节点删除
BSTnode *s=root->right;
while(s->left!=NULL) s=s->left;
root->key=s->key; //s为t右子树中根序列第一个结点
remove(root->right, s->key);
}
else{ //根节点删除
BSTnode* oldroot=root;
root=(root->left!=NULL)? root->left:root->right;
delete oldroot;
}
}
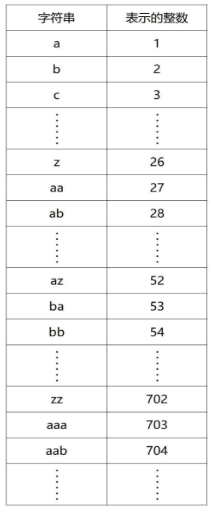
numofBST
F[i]=f[i-1]*(4*i-2)/(i+1)
二叉查找树总结
➢则由n个互异关键词随机生成的二叉查找树,平均高度为O(logn)
➢查找、插入、删除平均时间复杂度O(logn),但最坏情况时间复杂度为O(n)
2,高度平衡树:(AVL)
为了防止出现二叉查找树发生左/右偏的情况出现的,让一个树的左右高度相差不大于1
平衡系数:左子树高度-右子树高度
高度为h的AVL至少有

所以n>=2^(h/2),同理,h<=2logn
一颗AVL平均比完全二叉树高44%
节点AVLnode 记录的信息是键值,高度,左右子树
初始的时候每个节点的高度是0,空节点的高度为-1
具体操作:
1,计算高度
Int update_H(node* t){
If(t==NULL)return -1;
Int l=update_H(t->left);
Int r=update_H(t->right);
- >height=max(l,r)+1;
Return t->height;
}
Int Height(node* a){
Return a==NULL?-1”a->height;
}
2,旋转操作:
当前子树为root
左边的子树的高度为l1,右边为r1
2.1左边更高
2.1.1 左边的左边发生了插入,让左边提升


我们需要把B提升,A下降然后b右子树变成a的左子树
插入前后我们发现,高度没变
Void LL(node* & A){
Node* B=a->left;
- >left=B->right;
- >right=A;
Update_H(A);
Update_H(B);
A=B;
}
2.1.2左边的右边发生了插入,让左边的右边提升


将C的更低的子树交给B,然后让C提升,然后让C再次提升,将高的子树交给A
void LR(node* &A) {
RR(A->left);
LL(A);
}
2.2.1右边的右边发生了插入


void RR(AVLnode* &A) {
AVLnode *B = A->right;
A->right = B->left;
B->left = A;
UpdateHeight(A);
UpdateHeight(B);
A = B;
}
2.2.2右边的左边发生了插入
先让A的右子树的左子树上提,然后再让右子树上移动
void RL(AVLnode* &A){
LL(A->right);
RR(A);
}
注意;我们在插入节点时我们需要从下面向上去调整
比如:依次插入关键字5, 4, 2, 8, 6, 9
插入2时:
 --->
--->
插入6时:
 --->
--->
再插入一个9:

使平衡:
void ReBalance(AVLnode* &t) {
if(t==NULL) return;
if(Height(t->left) - Height(t->right)==2){ //左边更深
if(Height(t->left->left) >= Height(t->left->right)) //左边的左边更深
LL(t);
else //右边更深
LR(t);
}else if(Height(t->right) - Height(t->left)==2){
if(Height(t->right->right) >= Height(t->right->left))
RR(t);
else
RL(t);
}
Update_H(t); //更新高度
}
插入:
void Insert(AVLnode* &root, int K) {
if(root==NULL) root=new AVLnode(K);
else if(K < root->key) //在左子树插入
Insert(root->left, K);
else if(K > root->key) //在右子树插入
Insert(root->right, K);
ReBalance(root);
}
删除
和二叉树的删除差不多,需要注意的是删除之后的平衡的保持
所以代码是一样的,只是最后需要加一个使平衡
void remove(AVLnode* &root, int K) {
if(root==NULL) return;
if(K<root->key) remove(root->left, K);
//在左子树删K
else if(K>root->key) remove(root->right, K); //在右子树删K
else if(root->left!=NULL && root->right!=NULL){
AVLnode *s=root->right;
while(s->left!=NULL) s=s->left;
root->key=s->key; //s为t右子树中根序列第一个结点
remove(root->right, s->key);
}else{
AVLnode* oldroot=root;
root=(root->left!=NULL)? root->left:root->right;
delete oldroot;
}
ReBalance(root);
}
高度平衡树总结
➢AVL树的高度为O(logn),因此使插入、删除、查找的最坏时间复杂度均为O(logn)。
➢删除操作最坏情况下需要做O(logn)次旋转。
➢对任意连续多次删除操作,每次删除所需的均摊旋转次数为O(1)[1]。对于任意多次插入和删除的混合序列,存在精心构造出的特定操作序列,使每次删除所需的均摊旋转次数为O(logn)
相关文章:
数据结构复习 (二叉查找树,高度平衡树AVL)
1.二叉查找树: 为了更好的实现动态的查找(可以插入/删除),并且不超过logn的时间下达成目的 定义: 二叉查找树(亦称二叉搜索树、二叉排序树)是一棵二叉树,其各结点关键词互异,且中根序列按其关键词递增排列。 等价描述: 二叉查找…...

FreeSWITCH 简单图形化界面39 - Windows安装FreeSWITCH For IPPBX(WSL环境)
FreeSWITCH 简单图形化界面39 - Windows安装FreeSWITCH For IPPBX(WSL环境) 0、界面预览1、部署WSL1.1 安装WSL1.2 安装Windows Terminal1.3 安装WSL配置工具 2、安装Ubuntu24.043、安装FreeSWITCH4、登录Web4.1 80端口占用了 5、测试6、卸载 0、界面预览…...
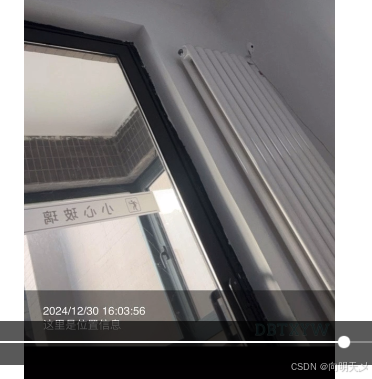
uniapp - 小程序实现摄像头拍照 + 水印绘制 + 反转摄像头 + 拍之前显示时间+地点 + 图片上传到阿里云服务器
前言 uniapp,碰到新需求,反转摄像头,需要在打卡的时候对上传图片加上水印,拍照前就显示当前时间日期地点,拍摄后在呈现刚才拍摄的图加上水印,最好还需要将图片上传到阿里云。 声明 水印部分代码是借鉴的…...
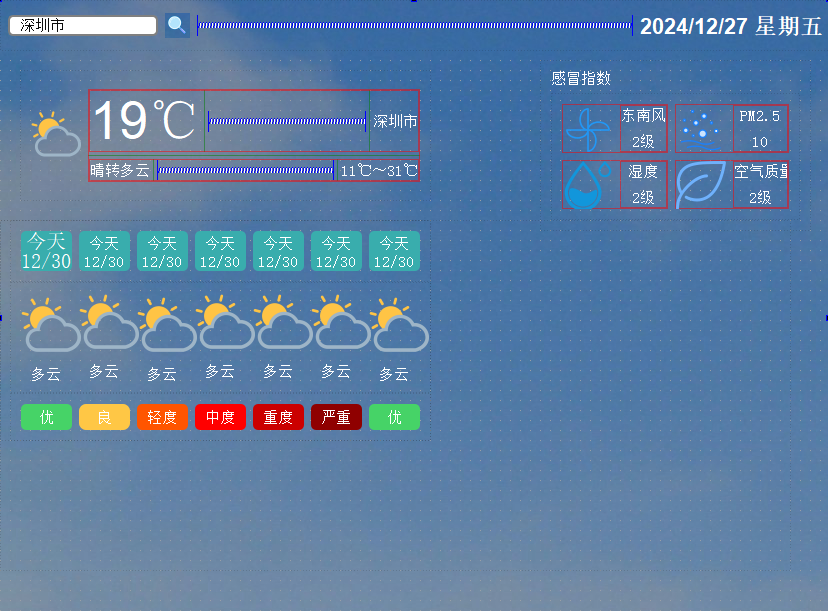
Qt天气预报系统设计界面布局第四部分左边
Qt天气预报系统设计 1、第四部分左边的第一部分1.1添加控件1.2修改控件名字 2、第四部分左边的第二部分2.1添加控件2.2修改控件名字 3、第四部分左边的第三部分3.1添加控件3.2修改控件名字 4、对整个widget04l调整 1、第四部分左边的第一部分 1.1添加控件 拖入一个widget&…...
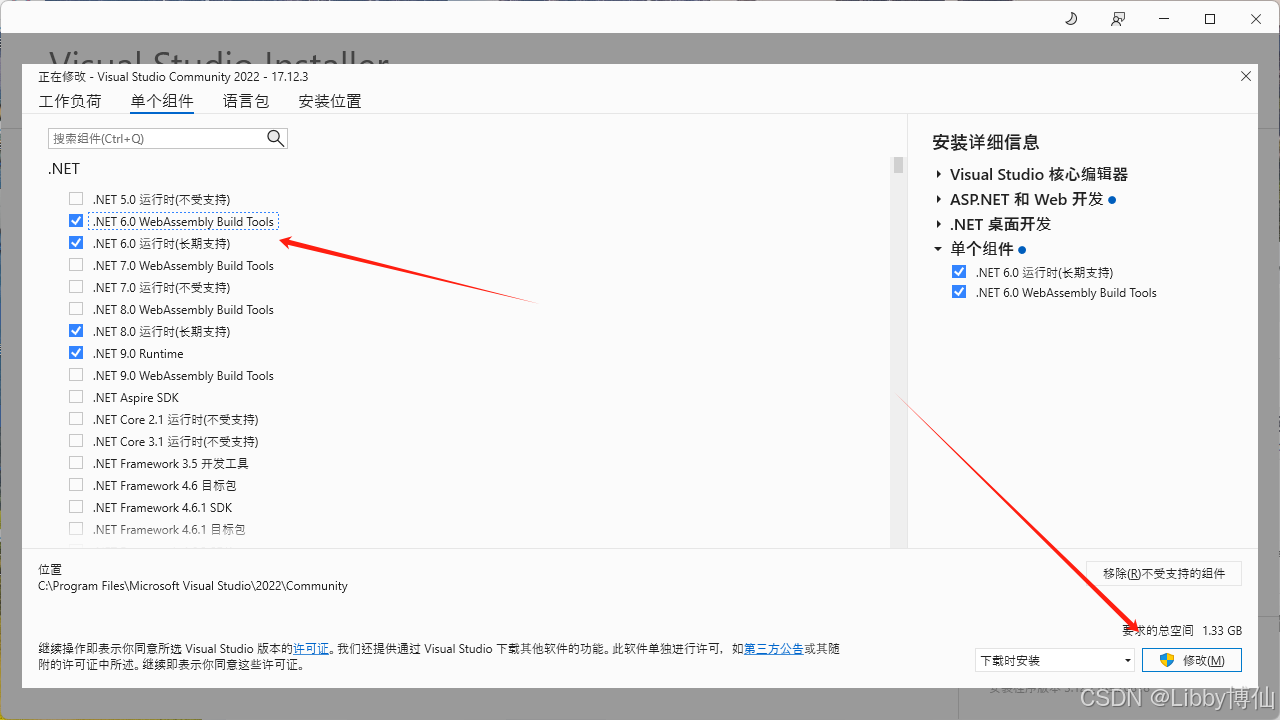
VS无法找到低版本的.net,vs2022创建不了.net6的项目
很多人会遇到安装完vs最新版(目前是2022)之后,创建不了旧版本的.net项目了,比如我在学习.net core 6,我的2022无法创建,只能创建.netcore8的项目,以及又安装了2019,同样无法创建,接下来介绍怎么…...

C++软件设计模式之解释器模式
解释器模式的目的和意图 解释器模式(Interpreter Pattern)是一种行为设计模式,主要用于定义一种语言的文法,并通过该文法解释语言中的句子(表达式)。解释器模式的核心思想是将一个特定的语言表示为其文法规…...

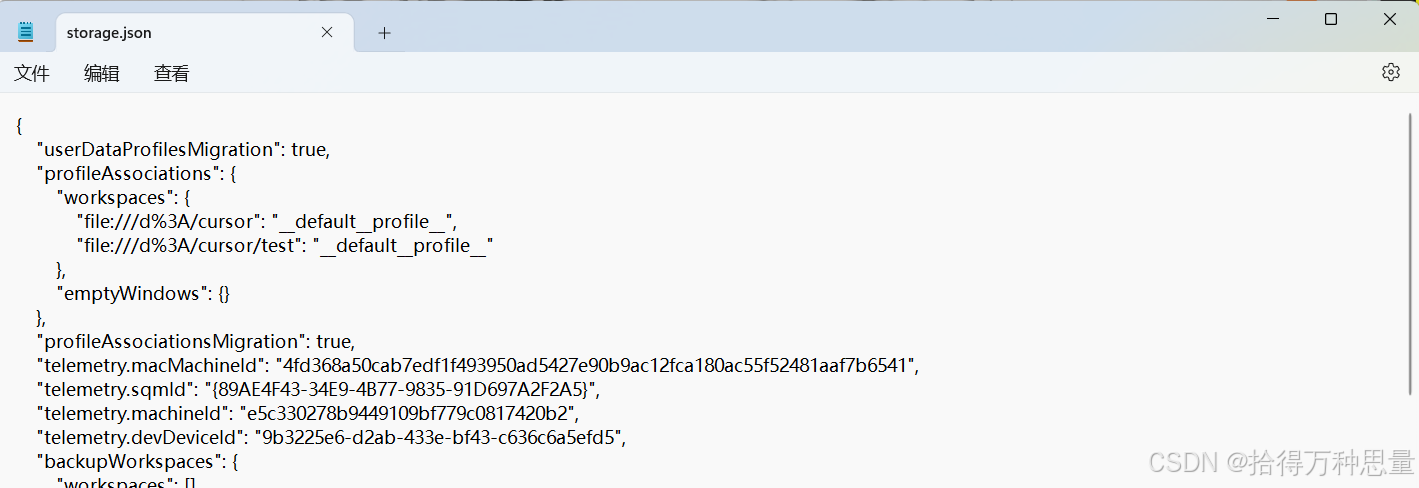
小程序发版后,用户使用时,强制更新为最新版本
为什么要强制更新为最新版本? 在小程序的开发和运营过程中,强制用户更新到最新版本是一项重要的策略,能够有效提升用户体验并保障系统的稳定性与安全性。以下是一些主要原因: 1. 功能兼容 新功能或服务通常需要最新版本的支持&…...
如何使用AI工具cursor(内置ChatGPT 4o+claude-3.5)
⚠️温馨提示: 禁止商业用途,请支持正版,充值使用,尊重知识产权! 免责声明: 1、本教程仅用于学习和研究使用,不得用于商业或非法行为。 2、请遵守Cursor的服务条款以及相关法律法规。 3、本…...

说说缓存使用的具体场景都有哪些?缓存和数据库一致性问题该如何解决?缓存使用常见问题有哪些?
面试官:说说缓存使用的具体场景都有哪些?缓存和数据库一致性问题该如何解决?缓存使用常见问题有哪些? 缓存的具体使用场景有这些: 数据频繁读取: 当某些数据频繁被读取而不常变化时,可以将这些…...
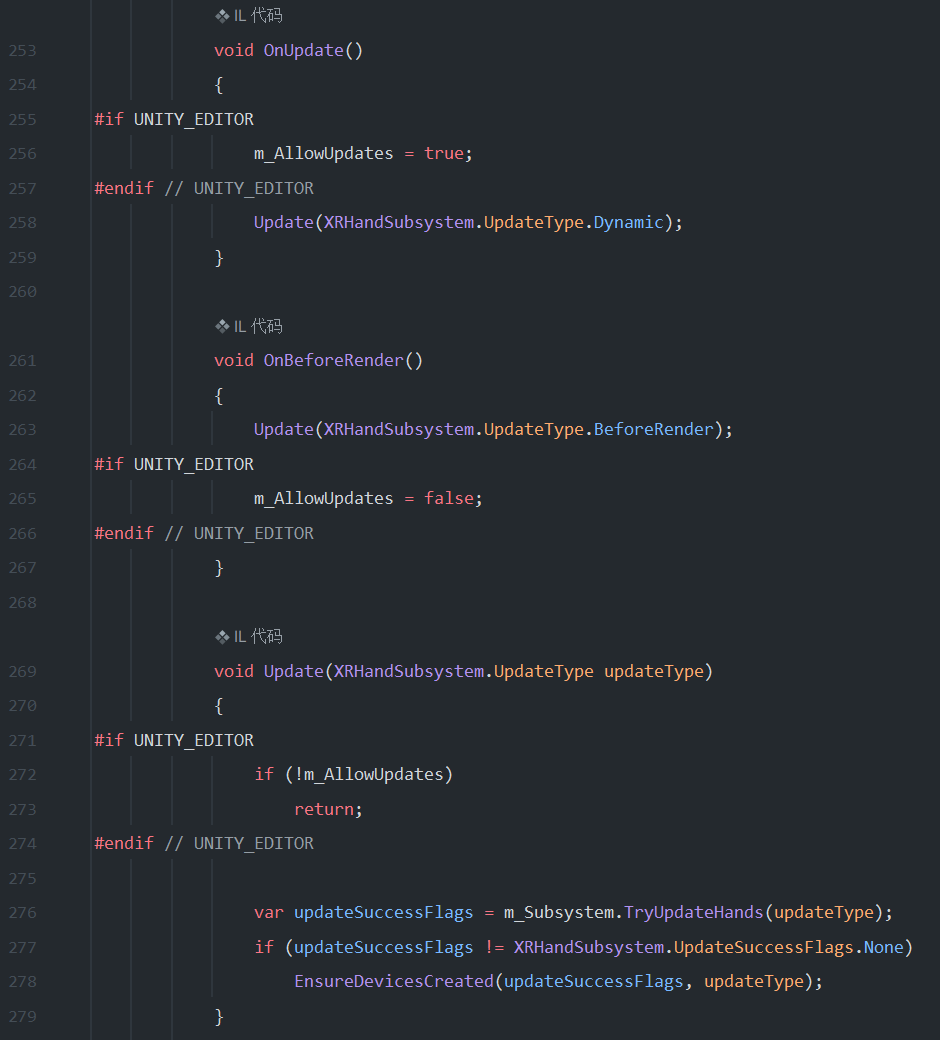
2025-01-01 NO2. XRHands 介绍
文章目录 软件配置1 XR Hands 简介2 XRHand2.1 Pose2.2 Handedness 3 XRHandJoint3.1 XRHandJointID3.2 XRHandJointTrackingState 4 XRHandSubsystem4.1 数据属性4.1.1 UpdateSuccessFlags4.1.2 UpdateType 4.2 处理器管理:注册和注销4.3 更新手部数据:…...
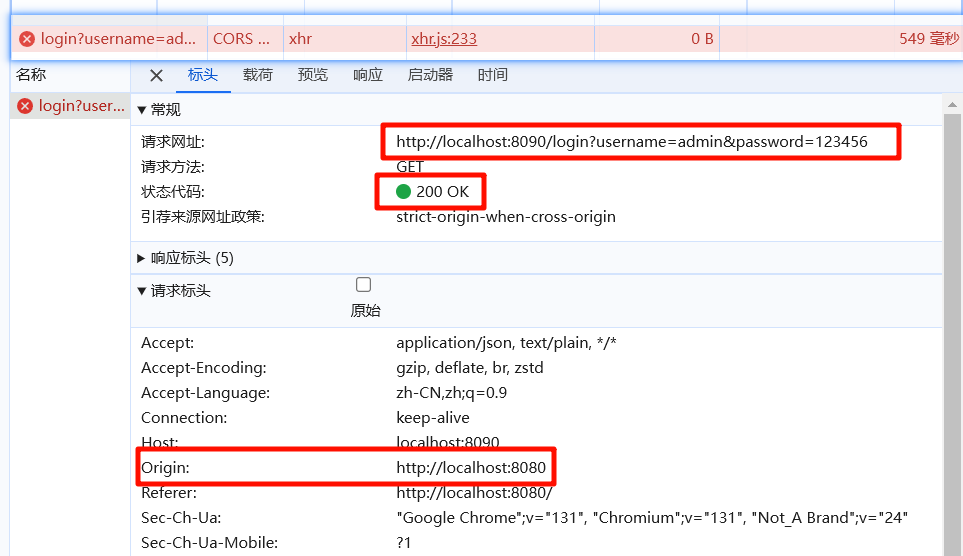
Java开发-后端请求成功,前端显示失败
文章目录 报错解决方案1. 后端未配置跨域支持2. 后端响应的 Content-Type 或 CORS 配置问题3. 前端 request 配置问题4. 浏览器缓存或代理问题5. 后端端口未被正确映射 报错 如下图,后端显示请求成功,前端显示失败 解决方案 1. 后端未配置跨域支持 …...

未来20年在大语言模型相关研究方向--大语言模型的优化与改进
未来20年在大语言模型相关研究方向 模型性能优化 模型架构创新:研究新型的模型架构,如探索更高效的Transformer变体、融合递归神经网络(RNN)和卷积神经网络(CNN)的优点,以提高模型的性能、可扩展性和适应性,满足不同应用场景对模型效率和效果的要求。高效训练算法:开…...

[react] 纯组件优化子
有组件如下,上面变化秒数, 下面是大量计算的子组件,上面每一秒钟变化一次,这时候子组件会不断重新渲染, 浪费资源 父组件如下 import React, { memo, useEffect, useMemo, useState } from react; import type { ReactNode, FC } from react; import HugeCount from ./Te; int…...
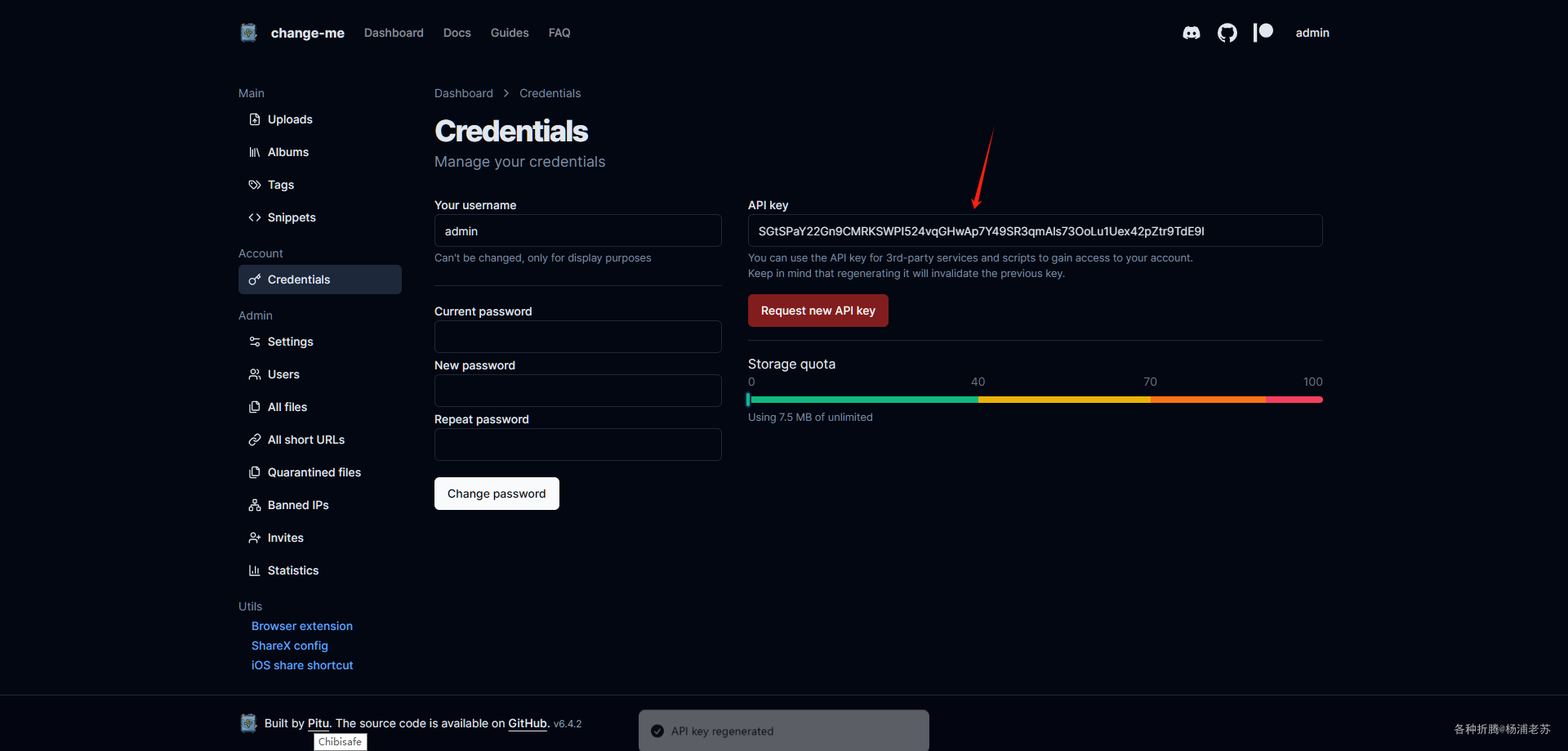
美观强大的文件保险库Chibisafe
简介 什么是 Chibisafe ? Chibisafe 是一款用 Typescript 编写的快速文件上传服务,非常实用。它接受文件、照片、文档以及您能想到的任何内容,并返回可共享的链接,供您发送给其他人。它易于使用、易于部署、免费且开源࿰…...
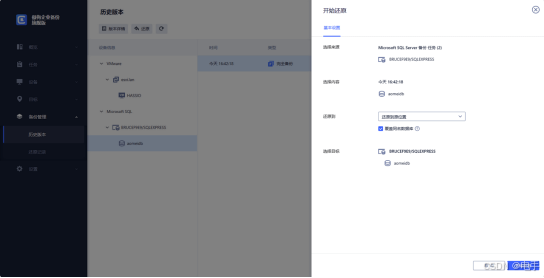
详细教程:SQL2008数据库备份与还原全流程!
数据的安全性至关重要,无论是操作系统、重要文件、磁盘存储,还是企业数据库,备份都是保障其安全和完整性的关键手段。拥有备份意味着即使发生误删、系统崩溃或病毒攻击等问题,也能迅速通过恢复功能解决,避免数据丢失带…...

HTML——49.header和footer标签
<!DOCTYPE html> <html><head><meta charset"UTF-8"><title>header和footer标签</title></head><body><!--header和footer标签:是html5中新标签--><!--header:定义文档的页眉,通常用来定义可见…...
【蓝桥杯选拔赛真题87】python输出字符串 第十五届青少年组蓝桥杯python选拔赛真题 算法思维真题解析
目录 python输出字符串 一、题目要求 1、编程实现 2、输入输出 二、算法分析 三、程序编写 四、程序说明 五、运行结果 六、考点分析 七、 推荐资料 1、蓝桥杯比赛 2、考级资料 3、其它资料 python输出字符串 第十五届蓝桥杯青少年组python比赛选拔赛真题详细解析…...

OpenStack-Dashboard界面简单修改
OpenStack Dashboard界面替换图片 一、dashboard界面Logo的路径及文件 dashboard的Logo存放(在Controller节点)的路径: /usr/share/openstack-dashboard/openstack_dashboard/static/dashboard/img/涉及需要修改的文件(3个&…...
DevOps工程技术价值流:Ansible自动化与Semaphore集成
在DevOps的浪潮中,自动化运维工具扮演着举足轻重的角色。Ansible,作为一款新兴的自动化运维工具,凭借其强大的功能和灵活性,在运维领域迅速崭露头角。本文将深入探讨Ansible的特点、架构、工作原理,以及其应用场景&…...
【服务器】上传文件到服务器并训练深度学习模型下载服务器文件到本地
前言:本文教程为,上传文件到服务器并训练深度学习模型,与下载服务器文件到本地。演示指令输入,完整的上传文件到服务器,并训练模型过程;并演示完整的下载服务器文件到本地的过程。 本文使用的服务器为云服…...

Multi-Agent 系统故障排查:常见问题与解决方案速查手册
Multi-Agent系统故障排查实战手册:从踩坑到精通的全场景解决方案 关键词 多智能体系统、故障排查、分布式系统、Agent通信故障、共识算法、容错机制、可观测性 摘要 随着大模型技术的爆发,Multi-Agent(多智能体)系统已经成为AI应用、工业互联网、分布式机器人、智能客服…...

别再只用录屏软件了!用Unity Recorder H.264 MP4格式导出高清无压缩视频的完整配置流程
别再只用录屏软件了!用Unity Recorder H.264 MP4格式导出高清无压缩视频的完整配置流程 在数字内容创作领域,视频输出质量往往直接决定作品的专业度。许多开发者习惯使用第三方录屏工具捕捉Unity运行画面,却忽略了引擎内置的Unity Recorder模…...

AnyVisLoc:专为低空多视角无人机定位打造的全球首个统一评测基准
一、论文背景与开创性意义 AnyVisLoc 是专为低空多视角条件下的无人机绝对视觉定位(Absolute Visual Localization,简称 AVL)设计的全球首个统一评测基准与大尺度数据集,论文题为 《Exploring the best way for UAV visual local…...

AUTO TECH China 2026广州汽车零部件展:从整机集成迈向核心部件的产业跃升
AUTO TECH China 2026广州汽车零部件展:从整机集成迈向核心部件的产业跃升当新能源汽车渗透率突破50%大关、汽车产业正经历百年未有的结构性变革之际,整车的差异化竞争优势正悄然从系统集成向功能模块与核心单元下沉。从一体化压铸车身结构件、高精度齿轮…...
)
别再只跑测试了!用KAIR库从零训练你自己的SwinIR超分模型(附DIV2K/Flickr2K数据集处理避坑指南)
从测试到训练:SwinIR超分模型实战进阶指南 当你第一次用SwinIR的预训练模型将模糊照片变得清晰时,那种惊艳感可能让你跃跃欲试想训练自己的模型。但面对几十GB的数据集和复杂的训练配置,很多开发者停在了"只跑测试"的阶段。本文将带…...

主从结合,安全互联:Anybus工业通信解决方案全栈升级
HMS亮相2026 PROFINET技术路演杭州站,展出全新Anybus SoM及全栈PROFINET方案,助力设备商应对CRA与机械法规双重合规挑战。 5月14日,由PI China主办的2026 PROFINET技术路演(杭州站)在西玥酒店圆满举行。HMS华东区OEM销…...

3分钟快速找回:手机号查QQ号Python工具完整指南
3分钟快速找回:手机号查QQ号Python工具完整指南 【免费下载链接】phone2qq 项目地址: https://gitcode.com/gh_mirrors/ph/phone2qq 你是否曾因为忘记QQ号而无法登录?或者换了新手机后,只记得手机号却找不到对应的QQ账号?…...

如何用Winhance一键优化Windows系统?完整免费指南
如何用Winhance一键优化Windows系统?完整免费指南 【免费下载链接】Winhance-zh_CN A Chinese version of Winhance. C# application designed to optimize and customize your Windows experience. 项目地址: https://gitcode.com/gh_mirrors/wi/Winhance-zh_CN …...

从项目实战出发:如何用AVL Cruise 2019与MATLAB/Simulink完成一个完整的DLL联合仿真流程?
从项目实战出发:如何用AVL Cruise 2019与MATLAB/Simulink完成一个完整的DLL联合仿真流程? 在汽车工程领域,系统级仿真已成为开发流程中不可或缺的一环。当我们需要评估整车动力系统性能时,AVL Cruise作为专业车辆仿真软件…...

【Autosar】MCAL - 从零到一的工程配置实战
1. 工程创建:从零搭建MCAL开发环境 第一次打开Autosar配置工具时,面对满屏的选项确实容易发懵。记得我刚接触MCAL配置时,光是工程创建就反复折腾了好几次。下面我就把踩过的坑和验证过的正确姿势分享给大家。 创建新工程时,工程名…...