计算机视觉算法实战——车道线检测
✨个人主页欢迎您的访问 ✨期待您的三连 ✨
✨个人主页欢迎您的访问 ✨期待您的三连 ✨
✨个人主页欢迎您的访问 ✨期待您的三连✨




车道线检测是计算机视觉领域的一个重要研究方向,尤其在自动驾驶和高级驾驶辅助系统(ADAS)中具有广泛应用。本文将深入探讨当前主流的车道线检测算法,选择性能最好的算法进行详细介绍,并涵盖数据集、代码实现、优秀论文、具体应用以及未来的研究方向和改进方向。
1. 当前相关的算法✨✨
车道线检测算法可以分为传统方法和深度学习方法两大类。以下是当前主流的一些算法:
1.1 传统方法
-
基于边缘检测和霍夫变换:通过Canny边缘检测和霍夫变换检测直线,适用于简单场景。
-
基于滑动窗口的拟合方法:使用滑动窗口搜索车道线像素,并通过多项式拟合车道线。
1.2 深度学习方法
-
LaneNet:基于实例分割的车道线检测网络,能够区分不同的车道线实例。
-
SCNN(Spatial CNN):通过空间卷积网络捕捉车道线的空间关系,适用于复杂场景。
-
PolyLaneNet:基于多项式回归的车道线检测方法,直接输出车道线的参数。
-
Ultra Fast Structure-aware Deep Lane Detection:通过结构感知的深度学习方法实现高效的车道线检测。

2. 性能最好的算法:Ultra Fast Structure-aware Deep Lane Detection✨✨
在众多算法中,Ultra Fast Structure-aware Deep Lane Detection(以下简称Ultra Fast Lane Detection)以其高效性和准确性脱颖而出。以下是该算法的基本原理:
2.1 算法原理
Ultra Fast Lane Detection 的核心思想是将车道线检测问题转化为行选择分类问题。具体步骤如下:
-
行选择:将图像沿垂直方向划分为若干行,每行选择若干个候选点。
-
特征提取:使用轻量级卷积神经网络(如ResNet)提取图像特征。
-
分类与回归:对每个候选点进行分类(是否为车道线)和回归(车道线的位置)。
-
后处理:通过非极大值抑制(NMS)和多项式拟合生成最终的车道线。
2.2 算法优势
-
高效性:通过行选择策略大幅减少计算量,适合实时应用。
-
准确性:在TuSimple和CULane数据集上均取得了优异的性能。
-
鲁棒性:能够处理复杂场景(如遮挡、光照变化等)。

3. 数据集及下载链接✨✨
车道线检测的性能评估依赖于高质量的数据集。以下是几个常用的车道线检测数据集:
3.1 TuSimple 数据集
-
简介:TuSimple 是一个广泛使用的车道线检测数据集,包含不同天气和光照条件下的道路图像。
-
下载链接:TuSimple Dataset
3.2 CULane 数据集
-
简介:CULane 是一个大规模车道线检测数据集,包含拥挤、夜间、曲线等多种复杂场景。
-
下载链接:CULane Dataset
3.3 BDD100K 数据集
-
简介:BDD100K 是一个多样化的驾驶场景数据集,包含车道线标注,适用于多任务学习。
-
下载链接:BDD100K Dataset

4. 代码实现✨✨
以下是基于Ultra Fast Lane Detection的代码实现示例(使用PyTorch框架):
import torch
import torch.nn as nn
import torchvision.models as modelsclass UltraFastLaneDetection(nn.Module):def __init__(self, num_lanes=4, num_points=72):super(UltraFastLaneDetection, self).__init__()self.backbone = models.resnet18(pretrained=True)self.backbone.fc = nn.Identity() # 移除全连接层self.cls_head = nn.Sequential(nn.Conv2d(512, num_lanes * num_points, kernel_size=1),nn.Sigmoid())self.reg_head = nn.Sequential(nn.Conv2d(512, num_lanes * num_points, kernel_size=1),nn.Sigmoid())def forward(self, x):x = self.backbone.conv1(x)x = self.backbone.bn1(x)x = self.backbone.relu(x)x = self.backbone.maxpool(x)x = self.backbone.layer1(x)x = self.backbone.layer2(x)x = self.backbone.layer3(x)x = self.backbone.layer4(x)cls_output = self.cls_head(x)reg_output = self.reg_head(x)return cls_output, reg_output# 示例用法
model = UltraFastLaneDetection()
input_image = torch.randn(1, 3, 256, 512) # 输入图像
cls_output, reg_output = model(input_image)
print(cls_output.shape, reg_output.shape) # 输出分类和回归结果
5. 优秀论文及下载链接✨✨
以下是车道线检测领域的几篇经典论文:
5.1 《Ultra Fast Structure-aware Deep Lane Detection》
-
简介:提出了一种高效的车道线检测方法,通过行选择策略实现实时检测。
-
下载链接:Ultra Fast Lane Detection Paper
5.2 《LaneNet: Real-Time Lane Detection Networks for Autonomous Driving》
-
简介:提出了一种基于实例分割的车道线检测网络。
-
下载链接:LaneNet Paper
5.3 《PolyLaneNet: Lane Estimation via Deep Polynomial Regression》
-
简介:提出了一种基于多项式回归的车道线检测方法。
-
下载链接:PolyLaneNet Paper

6. 具体应用✨✨
车道线检测技术在多个领域具有广泛的应用,尤其是在自动驾驶和智能交通系统中。以下是其在实际场景中的具体应用案例:
6.1 自动驾驶
-
应用案例:在自动驾驶汽车中,车道线检测用于实现车道保持辅助(LKA)和车道居中控制(LCC)。例如,特斯拉的Autopilot系统通过实时检测车道线,确保车辆在车道内安全行驶。
-
优势:
-
提高驾驶安全性,减少因车道偏离引发的事故。
-
减轻驾驶员负担,提升驾驶体验。
-
-
局限性:
-
在复杂场景(如车道线模糊、遮挡、恶劣天气)下,检测精度可能下降。
-
对高精度地图和传感器的依赖较高,成本较大。
-
6.2 高级驾驶辅助系统(ADAS)
-
应用案例:车道线检测是ADAS的核心功能之一,用于实现车道偏离预警(LDW)。例如,当车辆无意中偏离车道时,系统会通过声音或震动提醒驾驶员。
-
优势:
-
显著降低车道偏离引发的事故率。
-
适用于多种车型,普及率高。
-
-
局限性:
-
在夜间或强光环境下,检测效果可能不理想。
-
对车道线清晰度要求较高,无法应对所有道路条件。
-
6.3 交通监控与管理
-
应用案例:在智能交通系统中,车道线检测用于交通流量分析和违规行为检测。例如,通过监控摄像头实时检测车道线,统计车流量并识别违规变道行为。
-
优势:
-
提高交通管理效率,减少人工成本。
-
为城市规划提供数据支持。
-
-
局限性:
-
对摄像头分辨率和安装角度要求较高。
-
在复杂交通场景(如拥堵、多车道)下,检测难度较大。
-
6.4 高精度地图构建
-
应用案例:车道线检测用于生成高精度地图,为自动驾驶汽车提供精确的道路信息。例如,高德地图和百度地图通过车道线检测技术完善其高精度地图数据。
-
优势:
-
提供更精确的导航和路径规划服务。
-
支持自动驾驶汽车的定位和决策。
-
-
局限性:
-
数据采集和标注成本较高。
-
需要频繁更新以应对道路变化。
-
7. 未来的研究方向和改进方法✨✨
车道线检测技术虽然取得了显著进展,但仍面临许多挑战。以下是未来的研究方向和改进方法:
7.1 多传感器融合
-
研究方向:结合摄像头、雷达、激光雷达等多种传感器的数据,提高车道线检测的鲁棒性和准确性。
-
改进方法:
-
设计多模态融合算法,充分利用不同传感器的优势。
-
开发高效的传感器数据同步和校准技术。
-
7.2 自适应学习
-
研究方向:开发能够适应不同天气、光照和道路条件的自适应算法。
-
改进方法:
-
引入在线学习和迁移学习技术,使模型能够动态调整。
-
构建多样化的训练数据集,覆盖更多场景。
-
7.3 实时性优化
-
研究方向:通过模型压缩和硬件加速提高算法的实时性。
-
改进方法:
-
使用轻量级网络(如MobileNet、ShuffleNet)替代复杂模型。
-
利用GPU、TPU等硬件加速计算。
-
7.4 3D车道线检测
-
研究方向:从2D检测扩展到3D空间,提供更丰富的环境信息。
-
改进方法:
-
结合深度估计技术,生成3D车道线模型。
-
开发适用于3D检测的深度学习网络。
-
7.5 弱监督学习
-
研究方向:减少对大量标注数据的依赖,降低数据标注成本。
-
改进方法:
-
使用弱监督学习方法,利用少量标注数据训练模型。
-
探索自监督学习和无监督学习方法。
-
7.6 鲁棒性提升
-
研究方向:提高算法在复杂场景下的鲁棒性。
-
改进方法:
-
引入对抗训练和数据增强技术,提升模型的泛化能力。
-
设计更强大的后处理算法,减少误检和漏检。
-
7.7 端到端优化
-
研究方向:将车道线检测与其他自动驾驶任务(如目标检测、路径规划)结合,实现端到端优化。
-
改进方法:
-
设计多任务学习框架,共享特征提取网络。
-
开发联合优化算法,提升整体性能。
-
结语✨✨
车道线检测作为计算机视觉和自动驾驶领域的重要技术,其应用价值和发展潜力不可忽视。通过不断优化算法、提升鲁棒性和实时性,车道线检测将在未来的智能交通和自动驾驶中发挥更加重要的作用。希望本文能为读者提供有价值的参考,并激发更多关于车道线检测技术的研究与创新。
相关文章:
计算机视觉算法实战——车道线检测
✨个人主页欢迎您的访问 ✨期待您的三连 ✨ ✨个人主页欢迎您的访问 ✨期待您的三连 ✨ ✨个人主页欢迎您的访问 ✨期待您的三连✨ 车道线检测是计算机视觉领域的一个重要研究方向,尤其在自动驾驶和高级驾驶辅助…...
网络安全-安全散列函数,信息摘要SHA-1,MD5原理
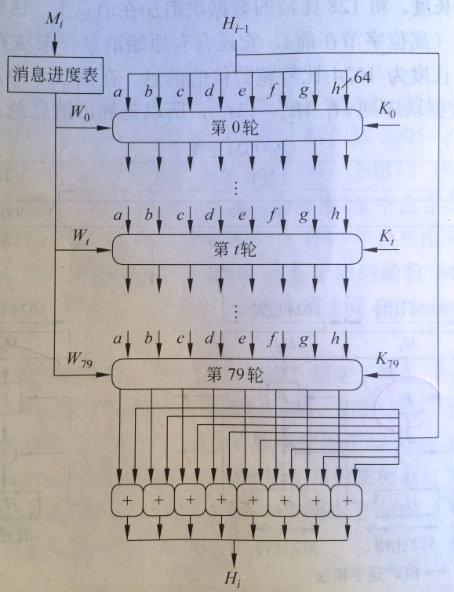
安全散列函数 单向散列函数或者安全散列函数之所以重要,不仅在于消息认证(消息摘要。数据指纹)。还有数字签名(加强版的消息认证)和验证数据的完整性。常见的单向散列函数有MD5和SHA 散列函数的要求 散列函数的目的是文件、消息或者其它数据…...

树莓派-5-GPIO的应用实验之GPIO的编码方式和SDK介绍
文章目录 1 GPIO编码方式1.1 管脚信息1.2 使用场合1.3 I2C总线1.4 SPI总线2 RPI.GPIO2.1 PWM脉冲宽度调制2.2 静态函数2.2.1 函数setmode()2.2.2 函数setup()2.2.3 函数output()2.2.4 函数input()2.2.5 捕捉引脚的电平改变2.2.5.1 函数wait_for_edge()2.2.5.2 函数event_detect…...

《零基础Go语言算法实战》【题目 2-10】接口的实现
《零基础Go语言算法实战》 【题目 2-10】接口的实现 请指出下面代码中存在的问题。 type Programmer struct { Name string } func (p *Programmer) String() string { return fmt.Sprintf("print: %v", p) } func main() { p : &Programmer{} p.String()…...

Win32汇编学习笔记10.OD插件
Win32汇编学习笔记10.OD插件-C/C基础-断点社区-专业的老牌游戏安全技术交流社区 - BpSend.net 筛选器异常插件 被调试程序: 📎TestUnh.zip 我们用OD条试试发现,无法断下 筛选器异常 异常产生之后 异常首先会给调试器 调试器不处理就会给 SEH , SEH 不处理的话有又给…...

在vscode中已经安装了插件Live Server,但是在命令面板确找不到
1、VS Code缓存问题: 有时VS Code的缓存可能导致插件无法正确加载。尝试删除VS Code缓存文件夹(如C:\Users\你的用户名\AppData\Roaming\Code)中的文件,并重启VS Code。 2、重新安装插件: 尝试卸载Live S…...

C# SQL ASP.NET Web
留学生的课程答疑 按照要求完成程序设计、数据库设计、用户手册等相关技术文档; 要求 1. 计算机相关专业,本科以上学历,至少有1年以上工作经验或实习经历。 2. 熟练掌握WinForm程序开发,或ASP.NET Web编程。 3. 熟悉C#中网络…...

联想java开发面试题及参考答案
IP 协议是哪一层的? IP 协议(Internet Protocol)属于网络层协议。 网络层主要负责将数据从源节点传输到目标节点,它在整个网络通信体系中起到了承上启下的关键作用。在分层网络模型中,下层(如数据链路层)为网络层提供物理链路的连接和帧传输服务。数据链路层关注的是在相…...
)
Node.js中的fs模块:文件与目录操作(写入、读取、复制、移动、删除、重命名等)
在Node.js中,fs模块提供了多种方法来处理文件和目录操作,使得数据的持久性保存和文件管理变得简单。下面将介绍文件读写、文件复制、文件移动、文件重命名、文件删除、文件夹创建与删除以及查看资源状态等常用操作。 首先,在使用写入和读取功…...

代码的形状:重构的方向
大概2周前写了一篇《代码的形状:从外到内的探索与实践》 涵树:代码的形状:从外到内的探索与实践 觉得这个话题还可以继续,它是一个从无形到有形的过程,而这个过程感觉就是王阳明先生说的“心即理”的探寻过程。 我讨论代码的形状ÿ…...

2021 年 3 月青少年软编等考 C 语言五级真题解析
目录 T1. 红与黑思路分析T2. 密室逃脱思路分析T3. 求逆序对数思路分析T4. 最小新整数思路分析T1. 红与黑 有一间长方形的房子,地上铺了红色、黑色两种颜色的正方形瓷砖。你站在其中一块黑色的瓷砖上,只能向相邻的黑色瓷砖移动。请写一个程序,计算你总共能够到达多少块黑色的…...

华为C语言编程规范总结
1.头文件更改会导致所有直接或间接包含该头文件的的C文件重新编译,会增加大量编译工作量,延长编译时间,因此: 1.1 头文件里尽量少包含头文件 1.2 头文件应向稳定的方向包含 2.每一个.c文件应有一个同名.h文件,…...

XML 解析器:深入解析与高效应用
XML 解析器:深入解析与高效应用 引言 XML(可扩展标记语言)作为一种重要的数据交换格式,被广泛应用于各种系统和平台中。为了有效地处理和解析XML数据,XML解析器发挥着至关重要的作用。本文将深入探讨XML解析器的原理…...

《系统爆破:MD5易破,后台登录可爆破?》
声明:笔记的只是方便各位师傅学习知识,以下代码、网站只涉及学习内容,其他的都与本人无关,切莫逾越法律红线,否则后果自负。 爆破Sales系统 一、爆破MD5 场景:已知MD5的加密字符串,如何得知明…...

基于微信小程序的书籍销售系统设计与实现(LW+源码+讲解)
专注于大学生项目实战开发,讲解,毕业答疑辅导,欢迎高校老师/同行前辈交流合作✌。 技术范围:SpringBoot、Vue、SSM、HLMT、小程序、Jsp、PHP、Nodejs、Python、爬虫、数据可视化、安卓app、大数据、物联网、机器学习等设计与开发。 主要内容:…...

SpringData-Redis缓存
Spring Framework是领先的全堆栈Java/JEE应用程序框架。它提供了一个轻量级容器和一个通过使用依赖注入、AOP和可移植服务抽象实现的非侵入性编程模型。 NoSQL存储系统为传统RDBMS提供了一种横向可扩展性和速度的替代方案。就实现而言,键值存储代表NoSQL空间中最大…...

Hadoop3.3.4伪分布式环境搭建
文章目录 前言一、准备1. 下载Hadoop2. 配置环境变量3. 配置免密 二、Hadoop配置1. hadoop-env.sh2. hdfs-site.xml3. core-site.xml4. mapred-site.xml5. yarn-site.xml 三、格式化四、启动 前言 hadoop学习——伪分布式环境——普通用户搭建 一、准备 1. 下载Hadoop 2. 配…...

【VUE 指令学习笔记】
v-bind :单向绑定解析表达式,可简写为:xxx v-model :双向数据绑定。 v-for:遍历数组/对象/字符串 v-on:绑定事件监听,可简写为。 v-if:条件渲染(动态控制节点是否存存在) v-else:条件渲染(动态控制节点是否存存在) v-show:条件渲染…...

【深度学习】布匹寻边:抓边误差小于3px【附完整链接】
布匹寻边 项目简介 布匹寻边是指布料裁剪过程中,通过AI寻边技术自动识别布匹的边缘,将检测到的边缘信息输出,确保裁剪的准确性,减少浪费,并提高生产效率。 项目需求 将打满针眼的布匹边缘裁剪掉,且误差小…...

【学习笔记】理解深度学习的基础:机器学习
1. 机器学习基础 1.1 机器学习的定义与重要性 定义:深度学习是机器学习的一种特定形式。为了深入理解深度学习,必须牢固掌握机器学习的基本原理。机器学习算法是一种能够从数据中学习的算法,通过经验E在任务T上提高性能度量P(Mi…...

DeepSeek代码质量评估实战手册:7步完成从混沌到可度量的质变跃迁
更多请点击: https://kaifayun.com 第一章:DeepSeek代码质量评估的底层逻辑与核心价值 DeepSeek代码质量评估并非简单地统计行数或检测语法错误,而是基于多维语义理解构建的推理系统。其底层逻辑融合了静态分析、符号执行与大语言模型生成式…...

从入门到上岗,Java+AI 复合型人才养成攻略
当下编程行业格局正在悄然改变,纯 Java 后端岗位内卷日趋严重,薪资增长逐步放缓;纯粹的 AI 算法岗门槛居高不下,对学历、数理功底要求严苛,普通开发者很难入局。 而Java+AI 复合型开发顺势成为行业刚需岗位,既依托成熟的 Java 体系承接业务开发,又能融入人工智能技术实…...

警惕!AI正在悄悄重构全球攻防格局
警惕!AI 正在悄悄重构全球攻防格局 热点聚焦 AI重构网络安全:全球巨头加速布局 2026年5月,全球网络安全领域迎来重大变革,AI技术正在重塑攻防格局。OpenAI发布专为网络安全防御打造的集成化AI平台Daybreak,将安全防…...

如何快速批量下载高质量歌词:ZonyLrcToolsX跨平台终极解决方案
如何快速批量下载高质量歌词:ZonyLrcToolsX跨平台终极解决方案 【免费下载链接】ZonyLrcToolsX ZonyLrcToolsX 是一个能够方便地下载歌词的小软件。 项目地址: https://gitcode.com/gh_mirrors/zo/ZonyLrcToolsX 还在为本地音乐库缺少歌词而烦恼吗࿱…...

【与我学 ClaudeCode】协作篇 之 Worktree + Task Isolation :目录隔离的并行执行通道
作者:逆境不可逃 技术永无止境 希望我的内容可以帮助到你!!!! 大家吼 ! 我是 逆境不可逃 今天给大家带来文章《【与我学 ClaudeCode】协作篇 之 Worktree Task Isolation :目录隔离的并行执行通道》. Le…...

告别DLL缺失烦恼!Visual C++运行库合集一键搞定Windows应用依赖问题
告别DLL缺失烦恼!Visual C运行库合集一键搞定Windows应用依赖问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经在打开某个软件或游戏时…...

基于树莓派打造万能遥控器:从硬件选型到Web控制界面全解析
1. 项目概述:打造一个能“学习”的万能遥控器家里遥控器越来越多,电视、空调、风扇、灯带……每个设备都配一个,找起来麻烦,用起来也乱。市面上所谓的“万能遥控器”其实并不万能,它内置的码库有限,很多小众…...

告别手动预约:i茅台自动预约系统5分钟部署指南
告别手动预约:i茅台自动预约系统5分钟部署指南 【免费下载链接】campus-imaotai i茅台app自动预约,每日自动预约,支持docker一键部署(本项目不提供成品,使用的是已淘汰的算法) 项目地址: https://gitcode…...
)
DeepSeek安全测试辅助Prompt工程白皮书(含17个CVE靶场验证指令模板)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek安全测试辅助 DeepSeek系列大模型在代码生成、漏洞模式识别与安全上下文理解方面展现出独特优势,可作为安全测试工程师的智能协作者。其对OWASP Top 10、CWE分类体系及常见PoC结构具…...

别让依赖毁了你的实验:记一次Vision Mamba复现中causal_conv1d与mamba-ssm的版本“打架”事件
Vision Mamba复现实战:破解依赖冲突的工程化解决方案在深度学习项目的复现过程中,依赖管理往往是最容易被忽视却又最常导致问题的环节。最近在复现Vision Mamba模型时,我遭遇了一场典型的Python依赖"战争"——causal_conv1d与mamba…...