CV(10)--目标检测
前言
仅记录学习过程,有问题欢迎讨论
目标检测
object detection,就是在给定的图片中精确找到物体所在位置,并标注出物体的类别;输出的是分类类别label+物体的外框(x, y, width, height)。
目标检测算法:
1、候选区域/框 + 深度学习分类:通过提取候选区域,并对相应区域进行以深度学习方法为主的
分类的方案,如:
• R-CNN(Selective Search + CNN + SVM)
• SPP-net(ROI Pooling)
• Fast R-CNN(Selective Search + CNN + ROI)
• Faster R-CNN(RPN + CNN + ROI)
2、 基于深度学习的回归方法:YOLO/SSD 等方法
IOU:
一个简单的测量标准,测量两个框之间的相似度,目标和实际的交集/并集,值越大越接近。
TP:预测为正样本,实际也为正样本
TN:预测为负样本,实际也为负样本
FP:预测为正样本,实际为负样本
FN:预测为负样本,实际为正样本
precision(精确度)和recall(召回率):精度是找得对,召回是找的全
precision = TP / (TP + FP)
recall = TP / (TP + FN)
F1 = 2 * (precision * recall) / (precision + recall)
边框回归:
目标是寻找一种关系使得原始窗口经过映射接近真实窗口
Input:
P=(Px,Py,Pw,Ph)
(注:训练阶段输入还包括 Ground Truth)
Output:
需要进行的平移变换和尺度缩放 dx,dy,dw,dh ,或者说是Δx,Δy,Sw,Sh 。
有了这四个变换我们就可以直接得到 Ground Truth。
TWO Stage:
Faster R-CNN(RPN + CNN + ROI)
Faster-RCNN
-
Conv layers:Faster RCNN首先使用一组基础的conv+relu+pooling层提取 image的feature maps。该feature maps被共享用于后续 RPN层和全连接层。
- 在Faster RCNN Conv layers中对所有的卷积都做了pad处理( pad=1,即填充一圈0),导致原图 变为 (M+2)x(N+2)大小,再做3x3卷积后输出MxN 。正是这种设置,导致Conv layers中的conv层 不改变输入和输出矩阵大小
- Conv layers中的pooling层kernel_size=2,stride=2。 这样每个经过pooling层的MxN矩阵,都会变为(M/2)x(N/2)大小
- 一个MxN大小的矩阵经过Conv layers固定变为(M/16)x(N/16)。 这样Conv layers生成的feature map都可以和原图对应起来
-
Region Proposal Networks(RPN):RPN网络用于生成region proposals。通过softmax判断anchors属于 positive或者negative,再利用bounding box regression 修正anchors获得精确的proposals。
- 直接使用RPN生成检测框,是Faster R-CNN的巨 大优势,能极大提升检测框的生成速度。

- 上面一条通过softmax分类anchors(按特征中心点穷举9个框),获得positive和negative分类-二分类;- 下面一条用于计算对于anchors的bounding box regression偏移量,以获得精确的proposal。- 最后的Proposal层则负责综合positive anchors和对应bounding box regression偏移量获取 proposals,同时剔除太小和超出边界的proposals
-
Roi Pooling:该层收集输入的feature maps和proposals, 综合这些信息后提取proposal feature maps,送入后续全连接层判定目标类别。
- proposal是对应MN尺度的,所以先使用spatial_scale参数将其映射回(M/16)(N/16)大小 feature map尺度;
- 再将每个proposal对应的feature map区域水平分为pooled_w * pooled_h的网格;
- 对网格的每一份都进行max pooling处理。
-
Classification:利用proposal feature maps计算 proposal的类别,同时再次bounding box regression获得检测框最终的精确位置。
实现Faster-RCNN网络结构
"""
实现Faster-RCNN
"""
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
import torchvision.transforms as transforms
from torch.utils.data import Dataset, DataLoader
import numpy as np
import cv2# 定义骨干网络,这里使用 ResNet
class ResNetBackbone(nn.Module):def __init__(self):super(ResNetBackbone, self).__init__()resnet = torchvision.models.resnet50(pretrained=True)self.features = nn.Sequential(*list(resnet.children())[:-2])def forward(self, x):x = self.features(x)return x# 区域生成网络 (RPN)
class RPN(nn.Module):def __init__(self, in_channels, num_anchors):super(RPN, self).__init__()self.conv = nn.Conv2d(in_channels, 512, kernel_size=3, stride=1, padding=1)# 2表示每个锚点有两种可能的类别:正负样本。通过这层卷积,网络将对每个锚点预测其概率得分。self.cls_layer = nn.Conv2d(512, num_anchors * 2, kernel_size=1, stride=1)# 4 表示对于每个锚点,要预测其边界框的 4 个参数self.reg_layer = nn.Conv2d(512, num_anchors * 4, kernel_size=1, stride=1)def forward(self, x):x = F.relu(self.conv(x))cls_scores = self.cls_layer(x)bbox_preds = self.reg_layer(x)cls_scores = cls_scores.permute(0, 2, 3, 1).contiguous().view(x.size(0), -1, 2)bbox_preds = bbox_preds.permute(0, 2, 3, 1).contiguous().view(x.size(0), -1, 4)return cls_scores, bbox_preds# RoI 池化层
class RoIPooling(nn.Module):def __init__(self, output_size):super(RoIPooling, self).__init__()self.output_size = output_sizedef forward(self, features, rois):roi_features = []for i in range(features.size(0)):# 包含了感兴趣区域的信息roi = rois[i]# features = (batch_size, channels, height, width),池化到output_size的统一size大小roi_feature = torchvision.ops.roi_pool(features[i].unsqueeze(0), [roi], self.output_size)roi_features.append(roi_feature)roi_features = torch.cat(roi_features, dim=0)return roi_features# Faster R-CNN 模型
class FasterRCNN(nn.Module):def __init__(self, num_classes):super(FasterRCNN, self).__init__()self.backbone = ResNetBackbone()self.rpn = RPN(2048, 9) # 假设使用 9 个锚点# 池化到 7*7self.roi_pooling = RoIPooling((7, 7))self.fc1 = nn.Linear(2048 * 7 * 7, 1024)self.fc2 = nn.Linear(1024, 1024)self.cls_layer = nn.Linear(1024, num_classes)self.reg_layer = nn.Linear(1024, num_classes * 4)def forward(self, x, rois=None):features = self.backbone(x)cls_scores, bbox_preds = self.rpn(features)if rois is not None:roi_features = self.roi_pooling(features, rois)roi_features = roi_features.view(roi_features.size(0), -1)fc1 = F.relu(self.fc1(roi_features))fc2 = F.relu(self.fc2(fc1))cls_preds = self.cls_layer(fc2)reg_preds = self.reg_layer(fc2)return cls_preds, reg_preds, cls_scores, bbox_predselse:return cls_scores, bbox_preds# 自定义数据集类
class CustomDataset(Dataset):def __init__(self, image_paths, target_paths, transform=None):self.image_paths = image_pathsself.target_paths = target_pathsself.transform = transformdef __len__(self):return len(self.image_paths)def __getitem__(self, idx):image = cv2.imread(self.image_paths[idx])image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)target = np.load(self.target_paths[idx], allow_pickle=True)if self.transform:image = self.transform(image)return image, target# 数据预处理
transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])# 训练函数
def train(model, dataloader, optimizer, criterion_cls, criterion_reg):model.train()total_loss = 0for images, targets in dataloader:images = images.to(device)targets = [t.to(device) for t in targets]optimizer.zero_grad()cls_preds, reg_preds, cls_scores, bbox_preds = model(images, targets)# 计算分类和回归损失,这里假设 targets 包含真实类别和边界框信息cls_loss = criterion_cls(cls_preds, targets)reg_loss = criterion_reg(reg_preds, targets)loss = cls_loss + reg_lossloss.backward()optimizer.step()total_loss += loss.item()return total_loss / len(dataloader)# 评估函数
def evaluate(model, dataloader):model.eval()correct = 0total = 0with torch.no_grad():for images, targets in dataloader:images = images.to(device)targets = [t.to(device) for t in targets]cls_preds, reg_preds, _, _ = model(images)# 计算评估指标,这里可根据具体需求实现# 例如计算 mAP 等return correct / totalif __name__ == "__main__":# 假设的图像和标注文件路径image_paths = ['img/street.jpg', 'img/street.jpg']target_paths = ['target1.npy', 'target2.npy']dataset = CustomDataset(image_paths, target_paths, transform)dataloader = DataLoader(dataset, batch_size=2, shuffle=True)device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')num_classes = 2 # 包括背景类model = FasterRCNN(num_classes).to(device)optimizer = torch.optim.SGD(model.parameters(), lr=0.001, momentum=0.9)criterion_cls = nn.CrossEntropyLoss()criterion_reg = nn.SmoothL1Loss()num_epochs = 10for epoch in range(num_epochs):loss = train(model, dataloader, optimizer, criterion_cls, criterion_reg)print(f'Epoch {epoch + 1}/{num_epochs}, Loss: {loss}')# 评估accuracy = evaluate(model, dataloader)print(f'Accuracy: {accuracy}')相关文章:
CV(10)--目标检测
前言 仅记录学习过程,有问题欢迎讨论 目标检测 object detection,就是在给定的图片中精确找到物体所在位置,并标注出物体的类别;输出的是分类类别label物体的外框(x, y, width, height)。 目标检测算法:…...
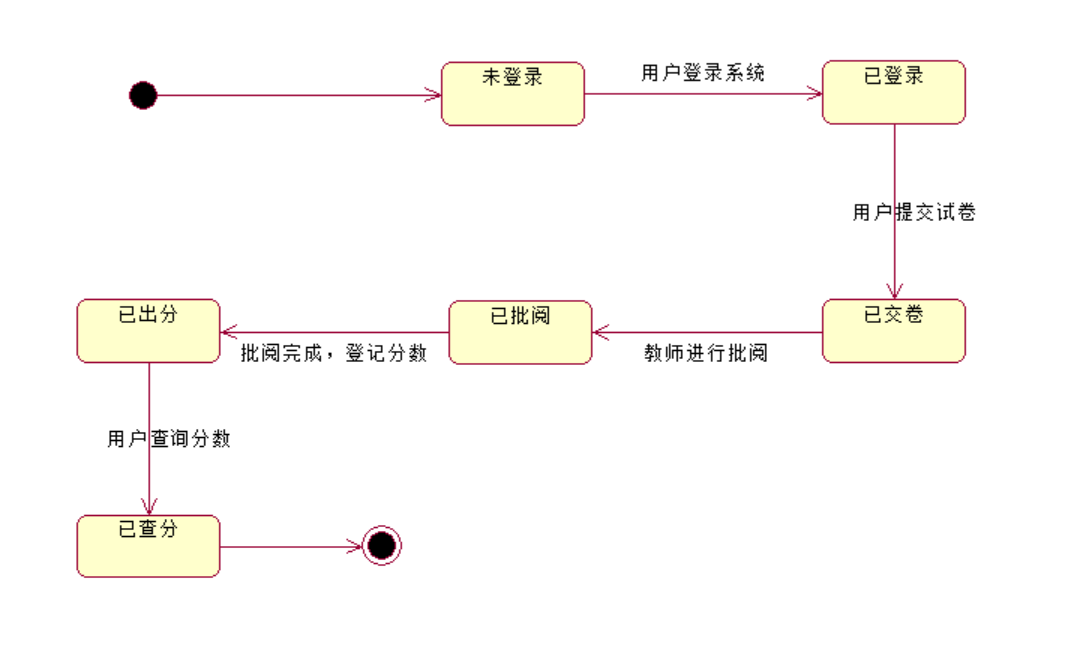
UML系列之Rational Rose笔记七:状态图
一、新建状态图 依旧是新建statechart diagram; 二、工作台介绍 接着就是一个状态的开始:开始黑点依旧可以从左边进行拖动放置: 这就是状态的开始,和活动图泳道图是一样的;只能有一个开始,但是可以有多个…...

C++单例模式的设计
单例模式(Singleton Pattern)是一种设计模式,用于确保一个类只有一个实例,并提供一个全局访问点来访问该实例。在C中,单例模式通常用于管理全局资源或共享状态。 以下是C中实现单例模式的几种常见方式: 懒…...

基于springboot的自习室预订系统
作者:学姐 开发技术:SpringBoot、SSM、Vue、MySQL、JSP、ElementUI、Python、小程序等 文末获取“源码数据库万字文档PPT”,支持远程部署调试、运行安装。 项目包含: 完整源码数据库功能演示视频万字文档PPT 项目编码࿱…...

shell笔记
1.使用 ls -l 及 find 查找某个或者多个目录文件数量时 单个目录: find 目录 -type f|wc -l与 ls -l 目录|grep -v total|wc -l 一致 多个目录:如上结果不一致,因为 ls -l 在算多目录时,会将多目录及空格打出算作额外行 find 更精…...

《鸿蒙Next微内核:解锁人工智能决策树并行计算的加速密码》
在当今人工智能飞速发展的时代,提升运算速度是推动其进步的关键。鸿蒙Next以其独特的微内核特性,为设计决策树的并行计算框架提供了新的思路和契机。 鸿蒙Next微内核特性概述 鸿蒙Next的微内核架构将核心功能模块化,仅保留进程管理、内存管…...

AI刷题-最大矩形面积问题、小M的数组变换
目录 一、最大矩形面积问题 问题描述 输入格式 输出格式 输入样例 输出样例 数据范围 解题思路: 问题理解 数据结构选择 算法步骤 最终代码: 运行结果: 二、小M的数组变换 问题描述 测试样例 解题思路: 问题…...

Redis集群部署详解:主从复制、Sentinel哨兵模式与Cluster集群的工作原理与配置
集群部署形式 1、主从复制1.1 工作机制1.2 配置实现1.3 优缺点1.4 部署形式1.5 主从复制优化 2、Sentinel 哨兵模式2.1 工作机制2.2 配置实现2.3 优缺点2.4 哨兵机制选举流程2.5 脑裂问题解决方案 3、Redis Cluster3.1 工作机制3.2 配置实现3.3 优缺点3.4 故障转移3.5 哈希槽为…...
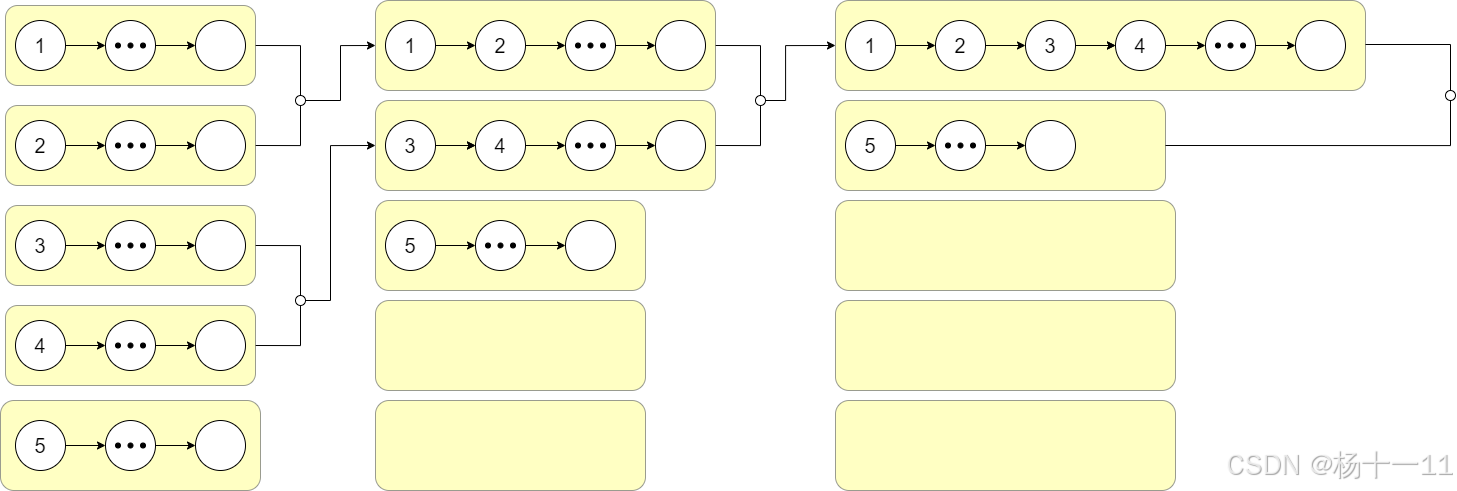
LeetCode热题100(三十四) —— 23.合并K个升序链表
LeetCode热题100(三十四) —— 23.合并K个升序链表 题目描述代码实现思路一:选择排序(199ms)思路二:归并排序(2ms) 思路解析 你好,我是杨十一,一名热爱健身的程序员在Coding的征程中,不断探索与…...

kalilinux - 目录扫描之dirsearch
情景导入 先简单介绍一下dirsearch有啥用。 假如你现在访问一个网站,例如https://www.example.com/ 它是一个电商平台或者其他功能性质的平台。 站在开发者的角度上思考,我们只指导https://www.example.com/ 但不知道它下面有什么文件,文…...

浅谈云计算04 | 云基础设施机制
探秘云基础设施机制:云计算的基石 一、云基础设施 —— 云计算的根基二、核心机制之网络:连接云的桥梁(一)虚拟网络边界ÿ…...

文件上传 分片上传
分片上传则是将一个大文件分割成多个小块分别上传,最后再由服务器合并成完整的文件。这种做法的好处是可以并行处理多个小文件,提高上传效率;同时,如果某一部分上传失败,只需要重传这一部分,不影响其他部分…...

【0391】Postgres内核 checkpointer process ① 启动初始化
相关文章: 【0108】checkpointer运行原理(概念篇)(1) 【0278】checkpointer 共享内存(CheckpointerShmem)初始化(3) 文章目录 1. 启动 checkpointer process1.1 初始化 checkpointer PID1.2 注册 signal1.3 初始化 last checkpoint time2. 确认 config 的 shared memo…...

链路追踪SkyWalking
链路追踪 链路追踪作用链路追踪的关键概念链路追踪的工作原理常用链路追踪工具链路追踪的实现步骤链路追踪的典型场景 SkyWalkingSkyWalking 的主要功能SkyWalking 的架构安装 SkyWalking从 SkyWalking 的官方 GitHub 仓库 下载最新版本。配置后端存储SkyWalking使用࿰…...

Uniapp判断设备是安卓还是 iOS,并调用不同的方法
在 UniApp 中,可以通过 uni.getSystemInfoSync() 方法来获取设备信息,然后根据系统类型判断当前设备是安卓还是 iOS,并调用不同的方法。 示例代码 export default {onLoad() {this.checkPlatform();},methods: {checkPlatform() {// 获取系…...

计算机网络 (42)远程终端协议TELNET
前言 Telnet(Telecommunication Network Protocol)是一种网络协议,属于TCP/IP协议族,主要用于提供远程登录服务。 一、概述 Telnet协议是一种远程终端协议,它允许用户通过终端仿真器连接到远程主机,并在远程…...

rtthread学习笔记系列-- 23 环形缓冲块 ringblock
文章目录 23 环形缓冲块 ringblock23.1 初始化23.2 PUT & GET 块23.3 块释放23.4 rt_rbb_blk_queue_get23.5 rt_rbb_blk_alloc https://github.com/wdfk-prog/RT-Thread-Study 23 环形缓冲块 ringblock 环形块状缓冲区简称为:rbb。与传统的环形缓冲区不同的是&…...

HunyuanVideo 文生视频模型实践
HunyuanVideo 文生视频模型实践 flyfish 运行 HunyuanVideo 模型使用文本生成视频的推荐配置(batch size 1): 模型分辨率(height/width/frame)峰值显存HunyuanVideo720px1280px129f60GHunyuanVideo544px960px129f45G 本项目适用于使用 N…...
)
Qt——QTableWidget 限制单元格输入范围的方法(正则表达式输入校验法、自定义代理类MyItemDelegrate)
【系列专栏】:博主结合工作实践输出的,解决实际问题的专栏,朋友们看过来! 《项目案例分享》 《极客DIY开源分享》 《嵌入式通用开发实战》 《C++语言开发基础总结》 《从0到1学习嵌入式Linux开发》...
深度学习论文: CAS-ViT: Convolutional Additive Self-attention Vision Transformers
深度学习论文: CAS-ViT: Convolutional Additive Self-attention Vision Transformers for Efficient Mobile Applications CAS-ViT: Convolutional Additive Self-attention Vision Transformers for Efficient Mobile Applications PDF:https://arxiv.org/pdf/2408.03703 PyT…...

Hirschmann RS20-0800M4M4SDAE工业以太网交换机
Hirschmann RS20-0800M4M4SDAE 工业以太网交换机产品特点:端口配置:共8个端口,含6个RJ45电口和2个ST光纤接口。端口速率:所有端口均为100Mbps快速以太网。光纤类型:2个光纤端口为多模、ST接头。管理类型:二…...

Redis分布式锁进阶第二十篇
一、本篇前置衔接 第二十篇我们完成了全系列终局复盘,整理了故障排查SOP与企业级落地铁律。常规单资源锁、热点分片锁、隔离锁全部讲透,但真实复杂业务永远不是单一资源:下单要扣库存、扣优惠券、扣积分、冻结余额,多资源并行争抢…...

转行网络安全运维:从0到1的可落地指南
转行网络安全运维:从0到1的可落地指南 一、 「3个核心技能:从零起步也能会」 网上学习资料多到爆炸,不用纠结“哪个最好”,记住一句话:**能学会、能上手的就是好的**!不管是免费视频还是付费课,…...

OmenSuperHub:释放惠普游戏本性能的纯净开源控制中心
OmenSuperHub:释放惠普游戏本性能的纯净开源控制中心 【免费下载链接】OmenSuperHub Control Omen laptop performance, fan speeds, and keyboard lighting, and unlock power limits. 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 还在为官方…...
)
Windows开机自动全屏打开指定网页?一个快捷方式参数就搞定(Chrome/Edge/Firefox教程)
Windows开机自动全屏展示网页的终极方案每次开机都要手动打开浏览器、输入网址、切换全屏模式?这种重复操作不仅浪费时间,还容易在重要演示时手忙脚乱。想象一下:电脑启动后自动全屏显示你的仪表盘、会议日程或是监控大屏,整个过程…...

应对Claude Code访问不稳定,快速切换至Taotoken的应急方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 应对Claude Code访问不稳定,快速切换至Taotoken的应急方案 对于依赖Claude Code进行日常开发或自动化任务的用户来说&a…...

AWS DevOps Agent 完全指南
AWS DevOps Agent 是 AWS 推出的前沿 AI 运维代理,自主调查和解决事件、持续预防故障、提升系统可靠性。本文档覆盖从原理到实战的全生命周期管理。 一、定位与价值 一句话定义 AWS DevOps Agent = AI 驱动的 SRE 队友,724 自主调查告警、定位根因、生成修复方案、预防未来…...
P2P聊天程序)
基于C#实现(WinForm)P2P聊天程序
♻️ 资源 大小: 29.8MB ➡️ 资源下载:https://download.csdn.net/download/s1t16/87430269 p2p聊天程序 一、功能介绍 1.1 登录 用户凭用户名和密码登录系统,可以更换服务器 IP 和端口,以防网络不畅通,连接服务…...

将deepseek v4 pro集成到codex桌面APP中使用
📕我是廖志伟,一名Java开发工程师、《Java项目实战——深入理解大型互联网企业通用技术》(基础篇)、(进阶篇)、《解密程序员的思维密码——沟通、演讲、思考的实践》作者、清华大学出版社签约作家、Java领域…...

从XAI到HXAI:构建以人为中心的可解释AI框架与实践
1. 项目概述:从“黑箱”到“白盒”,构建可信AI的演进之路在机器学习项目里摸爬滚打了十几年,我见过太多因为模型“说不清道不明”而引发的信任危机。一个在测试集上表现完美的信用评分模型,可能因为无法向风控专家解释“为什么拒绝…...