机器人传动力系统介绍
电驱动系统
- 无框力矩电机+减速器:优点是功率密度高,可在有限空间产生大扭矩,使机器人关节运动有力灵活,如人形机器人四肢运动。缺点是系统复杂,成本高,减速器会降低传动效率.
- 空心杯电机+行星滚柱丝杆:优点是响应速度快,能在小空间实现高负载,适用于机器人手部等需快速精确动作部位。缺点是空心杯电机扭矩小,行星滚柱丝杆成本高.
- 伺服舵机:优点是采用闭环控制,速度和位置控制精确,响应快,扭矩大,适用于对精度和性能要求高的工业机器人等。缺点是成本高,控制复杂,需专业调试维护。产品推荐:浙江国迈技术有限公司的Powmax/国迈E3伺服电机驱动套装,功率1.5-7.5kw,适用于机械设备、机器人等领域.
- 直流舵机:优点是响应快,扭矩大,控制简单,成本低,适用于初学者和预算有限项目,如遥控模型飞机等。缺点是精度较低,位置控制不够精确。
- 步进舵机:优点是位置控制精确,低速扭矩大,无需反馈信号,适用于需精确定位的3D打印机等。缺点是高速性能差,易失步。
- 空心杯舵机:优点是体积小、重量轻、效率高、噪音低,适合无人机等对重量和噪音有要求的应用。缺点是扭矩小,价格高。
- 无刷直流舵机:优点是效率高、寿命长、转速高,适合高速无人机等高性能要求的应用。缺点是成本高,控制复杂,需专门驱动电路 。
液压驱动系统
优点是功率密度高,力输出大,能承载大负荷,常用于大型工业机器人、建筑机器人等。缺点是系统复杂,包括液压泵、马达、油管、阀门等部件,成本高,且存在油液泄漏风险,维护麻烦,对环境有一定污染.
气动驱动系统
优点是成本低,气源易获取,清洁无污染,系统简单,可靠性高,适用于简单动作控制的机器人,如物料搬运机器人的夹取和释放动作。缺点是力量输出有限,难以实现高精度位置控制,且需配备气源装置,占用一定空间.
最新科技传动力系统
- 形状记忆合金驱动器:优点是能在温度变化时产生形状变化驱动机器人,能量密度高,柔韧性好,可实现复杂变形动作。缺点是响应速度慢,控制精度有限,需精确温度控制。
- 压电驱动器:优点是利用压电效应将电能转化为机械能,精度高、响应快,适用于微型机器人、精密操作机器人等领域。缺点是输出位移小,需高电压驱动,成本高.
- 磁流变液驱动器:优点是基于磁流变液的流变特性,在磁场作用下可瞬间改变粘度,实现对机器人关节的可控刚度和阻尼调节,提高机器人的适应性和稳定性。缺点是需磁场发生装置,增加系统复杂性和成本.
- 肌肉线驱动器:优点是通入电流时肌肉线会收缩产生拉力,类似生物肌肉运动方式,重量轻、柔韧性好、噪音低,可用于开发柔性机器人、仿生机器人等。缺点是力量输出有限,响应速度较慢 。
人造肌肉
- 气动人工肌肉:优点是功率重量比高,柔顺性好,能实现类似生物肌肉的收缩和舒张运动,可为康复机器人、仿生机器人等提供自然灵活的运动能力。缺点是需要气源装置,控制精度有限,且容易出现泄漏.
- 电液压致动器人造肌肉:优点是仅需两个输入信号驱动,能源效率高,能根据环境自适应调整角度,模拟生物肌肉成对运动。缺点是结构相对复杂,制造和维护成本高.
- 磁性复合人造肌肉:优点是能够承受超过自身重量1000倍的应力,可为机器人、可穿戴设备等带来更强大的机械臂。缺点是目前仍处于研究阶段,距离大规模应用还有一定距离.
相关文章:

机器人传动力系统介绍
电驱动系统 无框力矩电机减速器:优点是功率密度高,可在有限空间产生大扭矩,使机器人关节运动有力灵活,如人形机器人四肢运动。缺点是系统复杂,成本高,减速器会降低传动效率.空心杯电机行星滚柱丝杆&#x…...
)
1161 Merging Linked Lists (25)
Given two singly linked lists L1a1→a2→⋯→an−1→an and L2b1→b2→⋯→bm−1→bm. If n≥2m, you are supposed to reverse and merge the shorter one into the longer one to obtain a list like a1→a2→bm→a3→a4→bm−1⋯. For ex…...
:在多个文件中共享全局常量)
内联变量(inline variables):在多个文件中共享全局常量
在 C17 中,引入了 内联变量(inline variables) 的概念,可以用于在多个文件中共享全局常量。内联变量允许在头文件中定义变量,而不会导致链接错误(如重复定义)。这种方式非常适合用于定义跨多个文…...
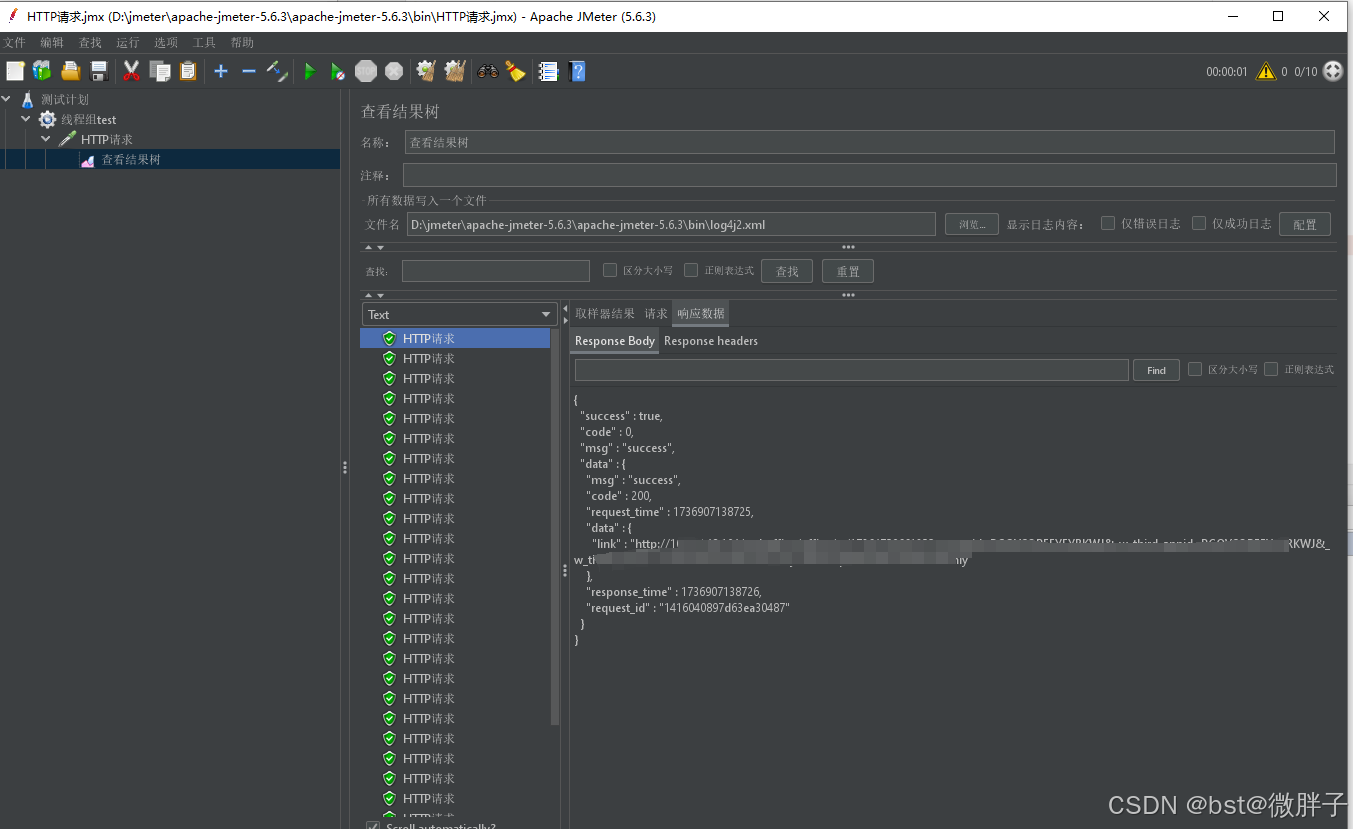
Jmeter进行http接口并发测试
目录: 1、Jmeter设置(1)设置请求并发数(2)设置请求地址以及参数(3)添加结果数 2、启动看结果 1、Jmeter设置 (1)设置请求并发数 (2)设置请求地址…...

力扣解题汇总_JAVA
文章目录 数学_简单13_罗马数字转整数66_ 加一9_回文数70_爬楼梯69_x的平方根509_斐波那契数列2235_两整数相加67_二进制求和415_字符串相加2413_最小偶倍数2469_温度转换704_二分查找(重点) 数组_简单1_两数之和88_合并两个有序数组 链表_简单21_合并两个有序链表203_移除链表…...

ubuntu下安装编译cmake,grpc与protobuf
文章目录 install cmakeinstall grpcinstall protobuf注 install cmake sudo apt-get install -y g make libssl-devcd third_party/cmake-3.17.2./configuresudo make && make installcmake --version install grpc $ sudo apt-get install -y build-essential auto…...
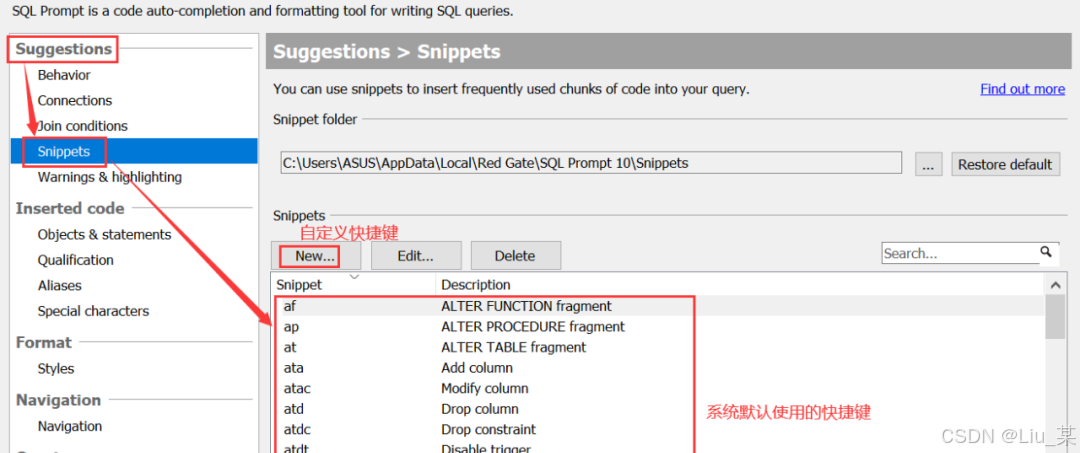
SQL Prompt 插件
SQL Prompt 插件 注:SQL Prompt插件提供智能代码补全、SQL格式化、代码自动提示和快捷输入等功能,非常方便,可以自行去尝试体会。 1、问题 SSMS(SQL Server Management Studio)是SQL Server自带的管理工具,…...
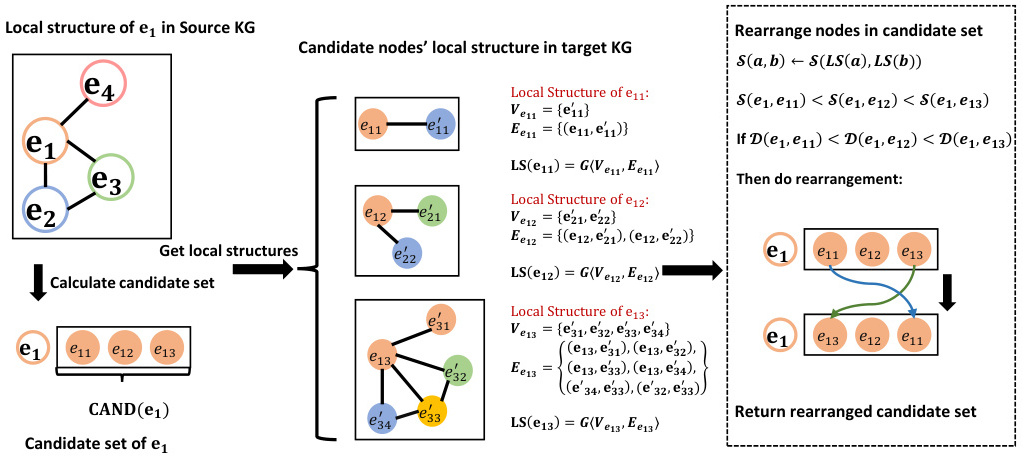
知识图谱抽取分析中,如何做好实体对齐?
在知识图谱抽取分析中,实体对齐是将不同知识图谱中的相同实体映射到同一表示空间的关键步骤。为了做好实体对齐,可以参考以下方法和策略: 基于表示学习的方法: 使用知识图谱嵌入技术,如TransE、GCN等,将实体…...

【Python通过UDP协议传输视频数据】(界面识别)
提示:界面识别项目 前言 随着网络通信技术的发展,视频数据的实时传输在各种场景中得到了广泛应用。UDP(User Datagram Protocol)作为一种无连接的协议,凭借其低延迟、高效率的特性,在实时性要求较高的视频…...
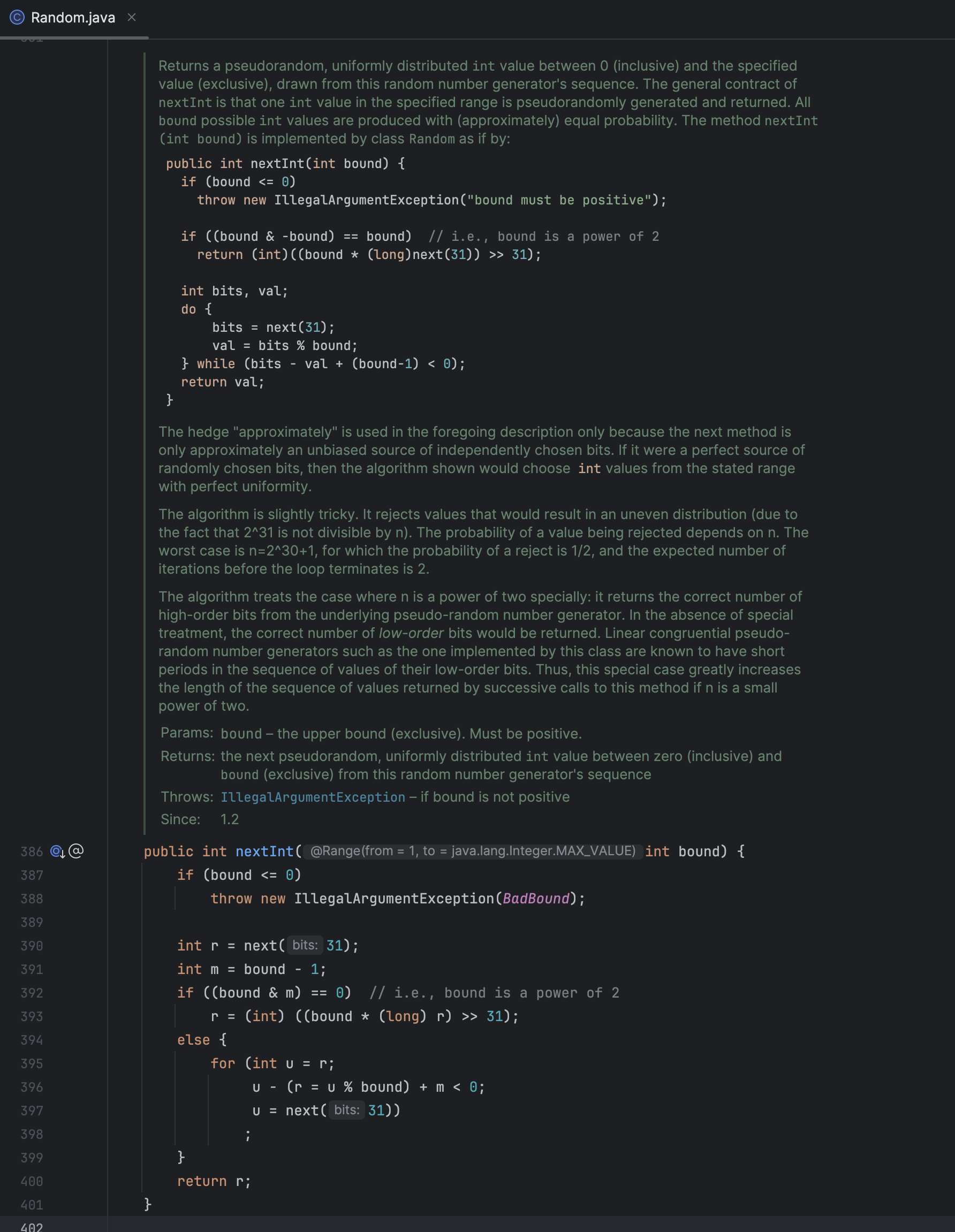
【伪随机数】关于排序算法自测如何生成随机数而引发的……
以 Random 开始 可能一开始,你只是写到了排序算法如何生成随机数 public static void main(String[] args) {Random random new Random();int[] nums new int[10];for (int i 0; i < nums.length; i) {nums[i] random.nextInt(100);}System.out.println(&q…...
是一种非参数统计方法)
核密度估计(Kernel Density Estimation, KDE)是一种非参数统计方法
一、核密度估计 核密度估计(Kernel Density Estimation, KDE)是一种非参数统计方法,用于估计随机变量的概率密度函数。它通过将每个数据点周围的核函数叠加,生成平滑的密度曲线。以下是其核心要点: 1. 基本概念 非参…...

【k8s面试题2025】2、练气初期
在练气初期,灵气还比较稀薄,只能勉强在体内运转几个周天。 文章目录 简述k8s静态pod为 Kubernetes 集群移除新节点:为 K8s 集群添加新节点Kubernetes 中 Pod 的调度流程 简述k8s静态pod 定义 静态Pod是一种特殊类型的Pod,它是由ku…...

栈溢出原理
文章目录 前言一、基本示例二、分析栈1. 先不考虑gets函数的栈情况2. 分析gets函数的栈区情况 三、利用栈1. 构造字符串2. 利用漏洞 前言 栈溢出指的是程序向栈中某个变量中写入的字节数超过了这个变量本身所申请的字节数,因而导致与其相邻的栈中的变量的值被改变。…...

Jmeter如何进行多服务器远程测试
🍅 点击文末小卡片 ,免费获取软件测试全套资料,资料在手,涨薪更快 JMeter是Apache软件基金会的开源项目,主要来做功能和性能测试,用Java编写。 我们一般都会用JMeter在本地进行测试,但是受到单…...

2.slf4j入口
文章目录 一、故事引入二、原理探究三、SLF4JServiceProvider四、总结 一、故事引入 故事要从下面这段代码说起 public class App {private static final Logger logger LoggerFactory.getLogger(App.class);public static void main( String[] args ) throws Exception {lo…...
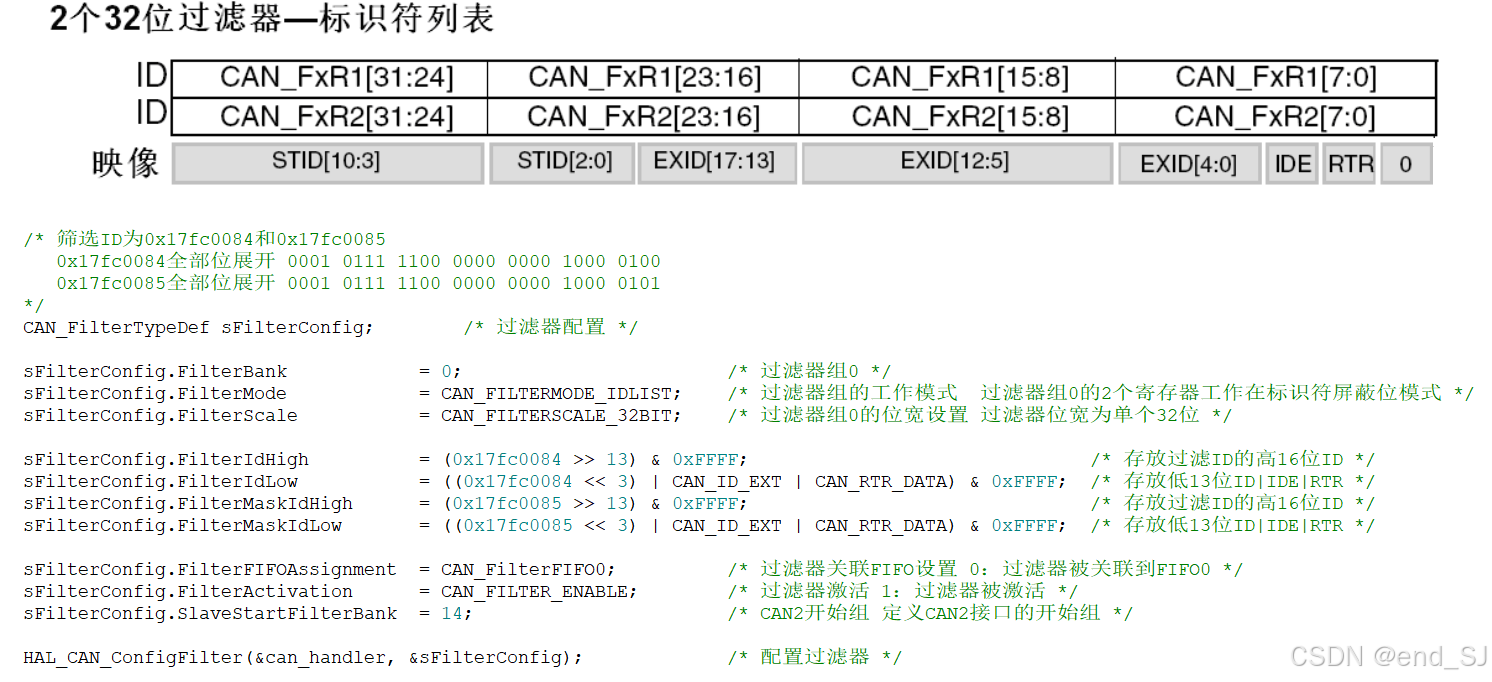
初学stm32 --- CAN
目录 CAN介绍 CAN总线拓扑图 CAN总线特点 CAN应用场景 CAN物理层 CAN收发器芯片介绍 CAN协议层 数据帧介绍 CAN位时序介绍 数据同步过程 硬件同步 再同步 CAN总线仲裁 STM32 CAN控制器介绍 CAN控制器模式 CAN控制器模式 CAN控制器框图 发送处理 接收处理 接收过…...

软件测试—接口测试面试题及jmeter面试题
一,接口面试题 1.接口的作用 实现前后端的交互,实现数据的传输 2.什么是接口测试 接口测试就是对系统或组件之间的接口进行测试,主要是校验数据的交换、传递和控制管理过程,以及相互逻辑关系 3.接口测试必要性 1.可以发现很…...
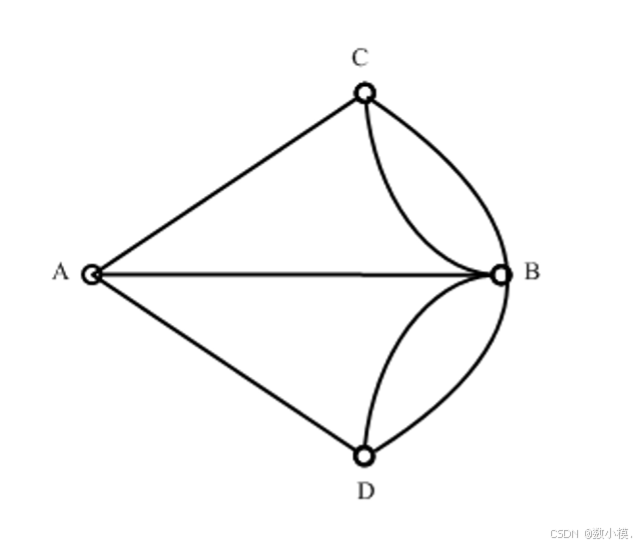
图论的起点——七桥问题
普瑞格尔河从古堡哥尼斯堡市中心流过,河中有小岛两座,筑有7座古桥,哥尼斯堡人杰地灵,市民普遍爱好数学。1736年,该市一名市民向大数学家Euler提出如下的所谓“七桥问题”: 从家里出发,7座桥每桥…...
)
嵌入式开发通讯协议大全(在写中)
目录 modbus RTU通讯协议: pmbus通讯协议: modbus RTU通讯协议: 主要应用功能: 规范了软件变量,访问功能码,给不同工程师开发的不同产品有统一的通讯标准 帧结构简单,占用带宽少,…...

webpack 4 升级 webpack 5
升级至最新的 webpack 和 webpack-cli npm run build 报错, unknown option -p 解决方案: 改成 --mode production npm run build 报错 unknown option --hide-modules 解决方案:直接移除 npm run build 报错:TypeError: Cannot a…...

ARM指令追踪技术及TRCVICTLR寄存器详解
1. ARM指令追踪技术概述在嵌入式系统开发和调试过程中,指令追踪(Instruction Trace)是一项至关重要的技术。它通过硬件机制记录处理器的执行流程,为开发者提供程序运行的完整轨迹。ARM架构从v7开始引入嵌入式跟踪宏单元࿰…...

HFSS仿真结果怎么看?以T型波导为例,读懂S参数与电场动态图
HFSS仿真结果深度解析:从S参数到电场动态图的实战指南当你第一次在HFSS中完成T型波导仿真后,面对满屏的曲线和彩色云图,是否感到既兴奋又困惑?那些起伏的S参数曲线究竟告诉你什么信息?电场图中跳跃的颜色又代表怎样的物…...
到底在‘看’什么?)
从社交关系到分子结构:图解GCN(图卷积网络)到底在‘看’什么?
从社交关系到分子结构:图解GCN(图卷积网络)到底在‘看’什么?想象一下,你刚搬到一个新社区,想快速了解周围的邻居。最直接的方式是什么?不是挨家挨户敲门,而是通过社区活动认识几位关…...

[智能体-69]:重新认知MCP:协议不生产智能,只是AI全域交互的标准化基石
MCP只是提供了大模型、编排调度、外部工具能够进行结构化交流的标准,而整个系统的智能主要依赖编排调度,与外部软件系统的交互取决于外部工具,包括外部语音交互、视觉交互、数字化交互。当下MCP(Model Context Protocol࿰…...
)
Windows 10/11系统下,SecureCRT 8.7.2保姆级安装与激活图文指南(含Keygen使用避坑点)
Windows平台SecureCRT 8.7.2全流程部署与安全配置指南在当今远程运维与网络管理的日常工作中,一款可靠的终端仿真工具如同工程师的瑞士军刀。作为行业标杆的SecureCRT,其8.7.2版本在Windows 10/11环境下的部署却常让新手陷入各种技术陷阱——从安装路径选…...

ESP32多任务水位监测:从Arduino到ESP-IDF的FreeRTOS实战
1. 项目概述:从Arduino到ESP-IDF的跃迁去年我在做毕业设计时,为了搭建一个ESP32的传感器节点演示程序,第一次深入使用了FreeRTOS。那段时间,我几乎天天和任务调度、队列、信号量打交道,从最初的一头雾水到后来能流畅地…...

我靠这个测试设计方法,把漏测率降低了80%
当“直觉测试”撞上南墙很长一段时间里,我和许多测试同行一样,测试用例的设计主要依靠两样东西:需求文档和“测试直觉”。这种模式在业务逻辑相对简单、迭代速度平缓时还能勉强应付。一旦面对复杂的企业级应用、高频的敏捷迭代,或…...

双稳健机器学习:用正交性与交叉拟合解决因果推断中的ML偏差
1. 项目概述:当机器学习遇见因果推断的“干扰”难题在实证研究的日常工作中,我们常常面临一个核心矛盾:我们真正关心的,往往只是一个或几个关键参数——比如一项政策对就业率的平均影响(平均处理效应,ATE&a…...

DAIR-V2X-V数据集深度评测:与KITTI、nuScenes比,它到底强在哪?
DAIR-V2X-V数据集深度评测:与KITTI、nuScenes比,它到底强在哪? 当技术团队着手开发面向中国道路的自动驾驶系统时,数据集的选择往往成为第一个关键决策点。过去十年间,KITTI和nuScenes等国际数据集一直是行业标杆&…...
)
告别杂乱!用FileMenu Tools 8.4.2一键清理Windows 11右键菜单(附隐藏技巧)
Windows 11右键菜单精简指南:用FileMenu Tools打造高效工作流每次在文件上点击右键时,那个缓慢弹出的冗长菜单是否让你感到烦躁?随着安装的软件越来越多,Windows的右键菜单往往会变得臃肿不堪,严重影响工作效率。今天&…...