[Computer Vision]实验二:图像特征点提取
目录
一、实验内容
二、实验过程及结果
2.1 Harris角点检测
2.2 SIFT算法
三、实验小结
一、实验内容
- 采用Harris与SIFT分别提取特征点及对应的描述子,对比两者的区别(特征点数量、分布、描述子维度、图像变化对二者的影响等)
- 利用特征匹配算法实现两幅相近图像的特征匹配,打印匹配点数量级结果
二、实验过程及结果
2.1 Harris角点检测
以下是Harris.py文件
from PIL import Image
from pylab import *
import matplotlib.pyplot as plt
from scipy.ndimage import filters
def compute_harris_response(im,sigma=3):imx = zeros(im.shape)filters.gaussian_filter(im, (sigma,sigma), (0,1), imx)imy = zeros(im.shape)filters.gaussian_filter(im, (sigma,sigma), (1,0), imy)Wxx = filters.gaussian_filter(imx*imx,sigma)Wxy = filters.gaussian_filter(imx*imy,sigma)Wyy = filters.gaussian_filter(imy*imy,sigma)Wdet = Wxx*Wyy - Wxy**2Wtr = Wxx + Wyyreturn Wdet / Wtrdef get_harris_points(harrisim, min_dist=10, threshold=0.1):corner_threshold = harrisim.max() * thresholdharrisim_t = (harrisim > corner_threshold) * 1coords = array(harrisim_t.nonzero()).Tcandidate_values = [harrisim[c[0], c[1]] for c in coords]index = argsort(candidate_values)allowed_locations = zeros(harrisim.shape)allowed_locations[min_dist:-min_dist, min_dist:-min_dist] = 1filtered_coords = []for i in index:if allowed_locations[coords[i, 0], coords[i, 1]] == 1:filtered_coords.append(coords[i])allowed_locations[(coords[i, 0] - min_dist):(coords[i, 0] + min_dist),(coords[i, 1] - min_dist): (coords[i, 1] + min_dist)] = 0return filtered_coordsdef plot_harris_points(image, filtered_coords):figure()gray()imshow(image)plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '*')show()def get_descriptors(image,filtered_coords,wid=5):desc = []for coords in filtered_coords:patch = image[coords[0]-wid:coords[0]+wid+1,coords[1]-wid:coords[1]+wid+1].flatten()desc.append(patch)return descdef match(desc1,desc2,threshold=0.5):n = len(desc1[0])d = -ones((len(desc1),len(desc2)))for i in range(len(desc1)):for j in range(len(desc2)):d1 = (desc1[i] - mean(desc1[i])) / std(desc1[i])d2 = (desc2[j] - mean(desc2[j])) / std(desc2[j])ncc_value = sum(d1*d2) / (n-1) if ncc_value > threshold:d[i,j] = ncc_value ndx = argsort(-d)matchscores = ndx[:,0]return matchscoresdef match_twosided(desc1,desc2,threshold=0.5):matches_12 = match(desc1,desc2,threshold)matches_21 = match(desc2,desc1,threshold)ndx_12 = where(matches_12 >= 0)[0]for n in ndx_12:if matches_21[matches_12[n]] != n:matches_12[n] = -1 return matches_12def appendimages(im1,im2):rows1 = im1.shape[0] rows2 = im2.shape[0]if rows1 < rows2:im1 = concatenate((im1,zeros((rows2-rows1,im1.shape[1]))),axis=0)elif rows1 > rows2:im2 = concatenate((im2,zeros((rows1-rows2,im2.shape[1]))),axis=0)return concatenate((im1,im2), axis=1)def plot_matches(im1,im2,locs1,locs2,matchscores,show_below=True):im3 = appendimages(im1,im2)if show_below:im3 = vstack((im3,im3)) imshow(im3)cols1 = im1.shape[1]for i,m in enumerate(matchscores):if m>0:plot([locs1[i][1],locs2[m][1]+cols1],[locs1[i][0],locs2[m][0]],'c')
axis('off')以下是test.py文件
from pylab import *
from PIL import Image
import harris
import sift
import cv2
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:\windows\fonts\SimSun.ttc", size=14)def harris_points(im):harrisim = harris.compute_harris_response(im)harrisim1 = 255 - harrisimfigure()gray()suptitle("Harris")subplot(2,3,1)title("test picture")imshow(im)subplot(2,3,2)title("harris response")imshow(harrisim1)print (harrisim1.shape)threshold1 = 0.01threshold2 = 0.05threshold3 = 0.1filtered_coord1 = harris.get_harris_points(harrisim, 6, threshold1)filtered_coord2 = harris.get_harris_points(harrisim, 6, threshold2)filtered_coord3 = harris.get_harris_points(harrisim, 6, threshold3)print (im.shape)subplot(2, 3, 4)title("thres=0.01")imshow(im)plot([p[1] for p in filtered_coord1], [p[0] for p in filtered_coord1], '+c')subplot(2, 3, 5)title("thres=0.05")imshow(im)plot([p[1] for p in filtered_coord2], [p[0] for p in filtered_coord2], '+c')subplot(2, 3, 6)title("thres=0.1")imshow(im)plot([p[1] for p in filtered_coord3], [p[0] for p in filtered_coord3], '+c')axis('off')axis('equal')show() def harris_match(im1,im2,wid):harrisim1=harris.compute_harris_response(im1,5)filtered_coords1=harris.get_harris_points(harrisim1,wid+1)d1=harris.get_descriptors(im1,filtered_coords1,wid)harrisim2=harris.compute_harris_response(im2,5)filtered_coords2=harris.get_harris_points(harrisim2,wid+1)d2=harris.get_descriptors(im2,filtered_coords2,wid)print("starting harris matching")matches=harris.match_twosided(d1,d2)figure()gray()harris.plot_matches(im1,im2,filtered_coords1,filtered_coords2,matches)show()
if __name__ == '__main__':im = array(Image.open('D:\Computer vision\School picture\school1.jpg').convert('L'))im1 = array(Image.open('D:\Computer vision\School picture\school1.jpg').convert('L'))im2 = array(Image.open('D:\Computer vision\School picture\school11.jpg').convert('L'))wid=5harris_points(im)harris_match(im1,im2,wid)实验结果如下所示:
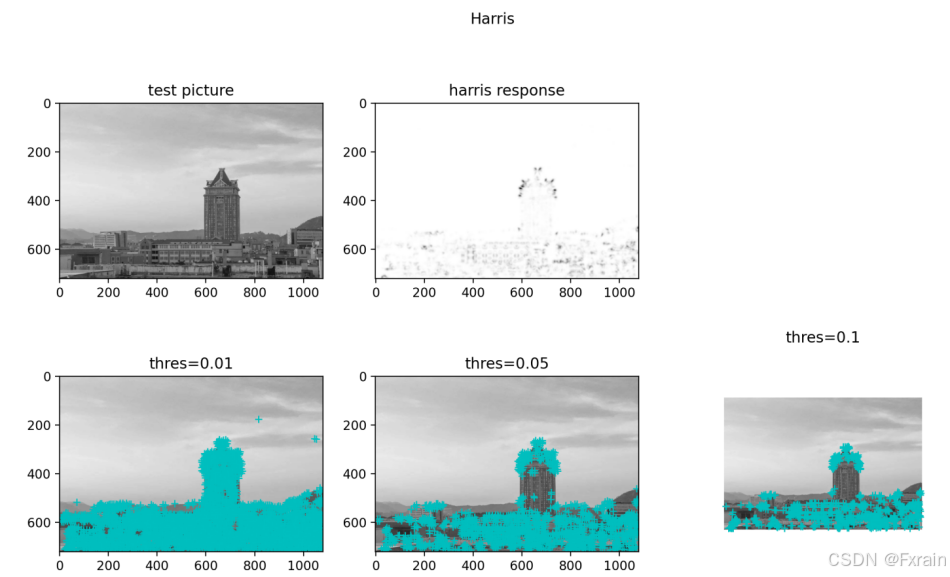
(1)绘制角点
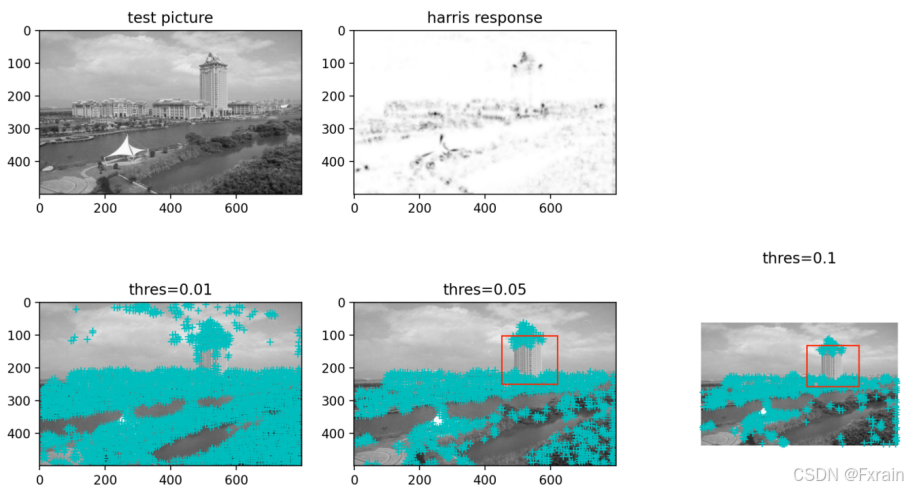
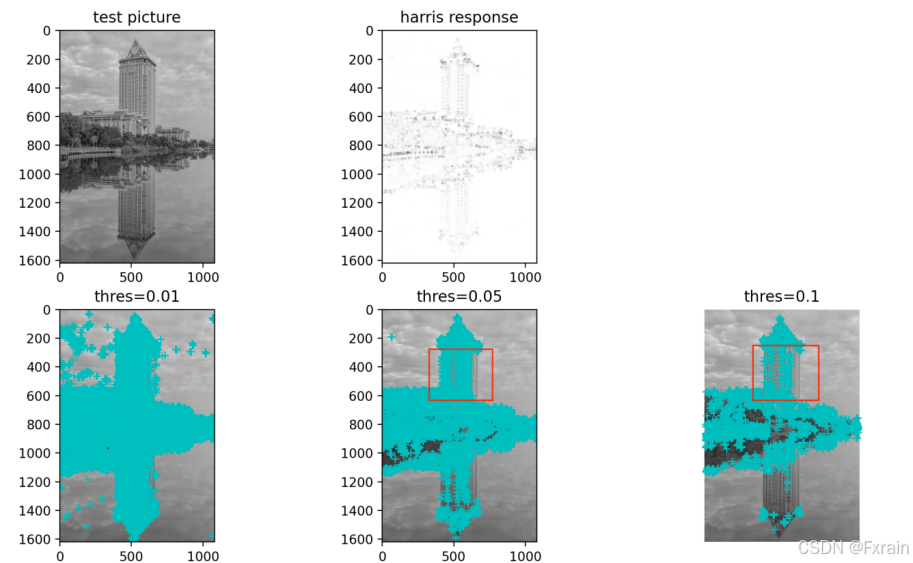
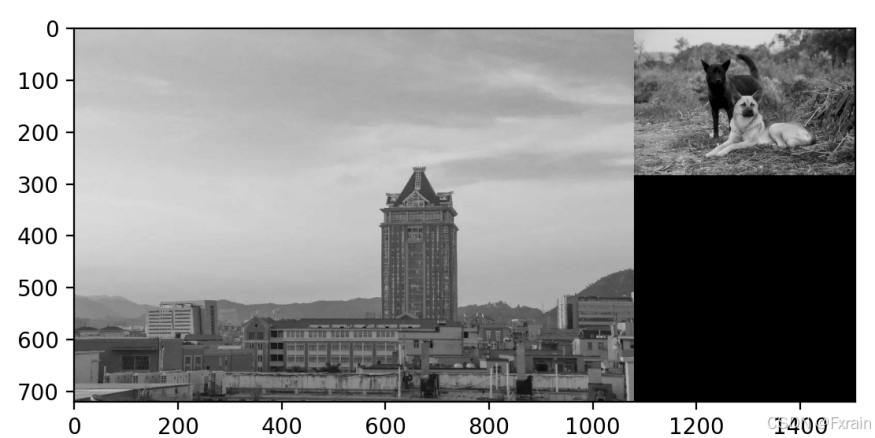
如图1所示,左上角图片为实验使用的灰度图像,第一行第二幅图代表使用Harris角点检测器的Harris响应函数,第二行三幅图分别为使用阈值为0.01检测出的角点图像,使用阈值为0.05检测出的角点图像,使用阈值为0.1检测出的角点图像,通过对比可以发现,使用的阈值越小,检测出的角点数量越多,使用的阈值越大,检测出的角点数量越少。当使用其他测试图像时,运行后的结果如图2、图3所示。对比图2、图3可以看到,当图像放大后,原来能检测到的角点就变成边线了,就检测不到了(对比图2、图3的红色标记框)这是Harris角点检测最大的缺陷,Harris角点检测不具有尺度不变性。
(2)图像的特征匹配
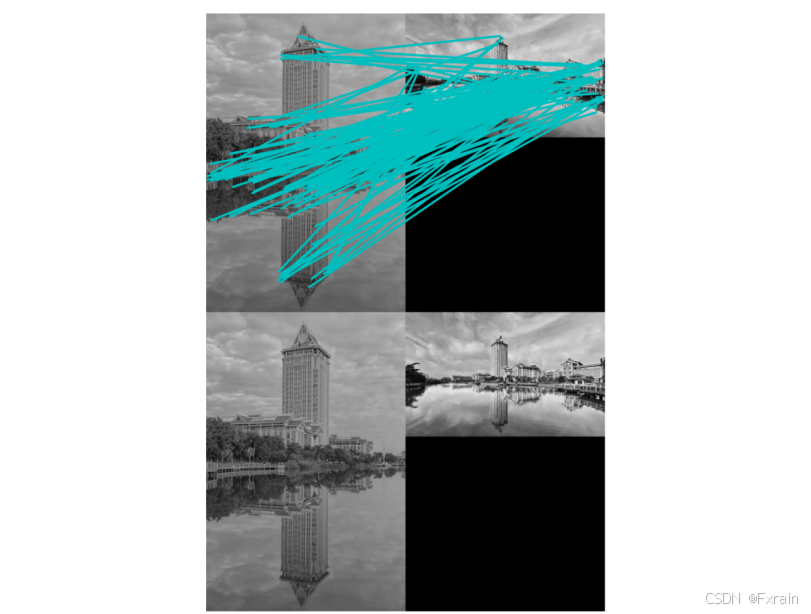
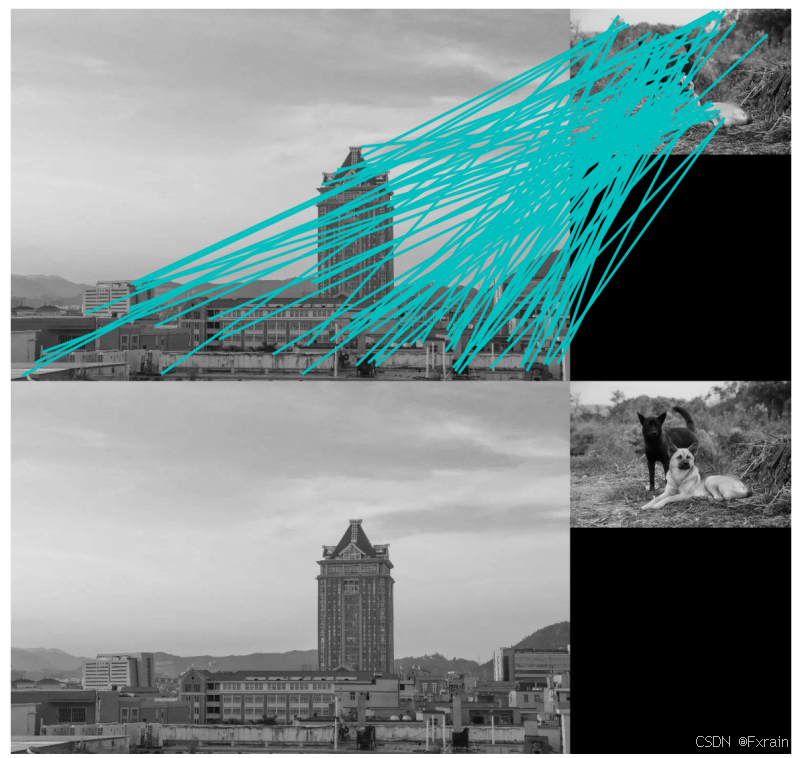
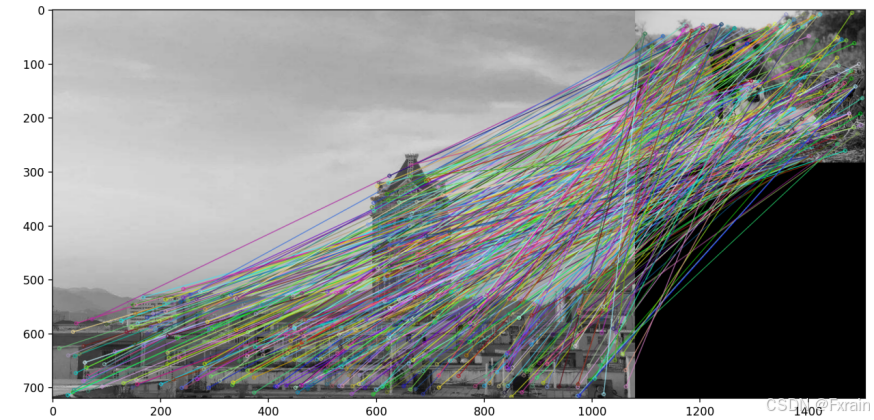
如图4所示,将归一化的互相关矩阵应用于Harris角点周围图像块,来寻找匹配对应点,图中以关键点为中心的邻域的大小,即descriptor描述符的窗口宽度wid=5,对于每一个关键点坐标 coords,都会提取以该点为中心、宽度为 wid 的邻域作为特征描述符。最后,所有的描述符被添加到一个列表 desc 中并返回。当修改窗口宽度wid=8时,结果如图5所示。当使用其他两幅相似的匹配图像时,结果如图6所示。当使用两幅内容不相似的图像时结果如图7所示。


2.2 SIFT算法
以下是sift.py文件
import cv2
import numpy as np
import matplotlib.pyplot as pltdef sift_compute(img1,img2):sift = cv2.SIFT_create()kp1, des1 = sift.detectAndCompute(img1, None)kp2, des2 = sift.detectAndCompute(img2, None)FLANN_INDEX_KDTREE = 1index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)search_params = dict(checks=50)flann = cv2.FlannBasedMatcher(index_params, search_params)matches = flann.knnMatch(des1, des2, k=2)goodMatch = []for m, n in matches:if m.distance < 0.75*n.distance:goodMatch.append(m)goodMatch = np.expand_dims(goodMatch, 1)print("匹配点数量级结果: " + str(len(goodMatch)))#print(goodMatch[:50])img_out = cv2.drawMatchesKnn(img1, kp1, img2, kp2, goodMatch, None, flags=2)img_out_rgb = cv2.cvtColor(img_out, cv2.COLOR_BGR2RGB)plt.figure()plt.imshow(img_out_rgb)plt.show()以下是test.py文件
def sift_process(img):gray= cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)sift = cv2.SIFT_create()kp,des=sift.detectAndCompute(gray,None)cv2.drawKeypoints(img,kp,img,flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)plt.figure(figsize=(8,6),dpi=100)plt.imshow(img[:,:,::-1]),plt.title('sift检测描述子',fontproperties=font)plt.xticks([]), plt.yticks([])plt.show()def sift_match(img1,img2):sift.sift_compute(img1,img2)if __name__ == '__main__':img = cv2.imread('School picture/school1.jpg')img1 = cv2.imread('D:/Computer vision/School picture/school1.jpg', cv2.IMREAD_GRAYSCALE)img2 = cv2.imread('D:/Computer vision/School picture/school11.jpg', cv2.IMREAD_GRAYSCALE)sift_process(img)sift_match(img1,img2)实验结果如下所示:
(1)绘制描述子
图8为通过opencv使用SIFT算法检测绘制描述子的结果,结果图中显示描述子的方向、尺度信息。当使用其他测试图像时,运行后的结果如图9、图10所示,对比Harris检测,SIFT特征提取具有一定的鲁棒性,即使在图像发生较大变化的情况下,仍然能够找到相似的特征点并生成相应的描述子(对比图2、图3的红色标记框)。



(2)图像的特征匹配
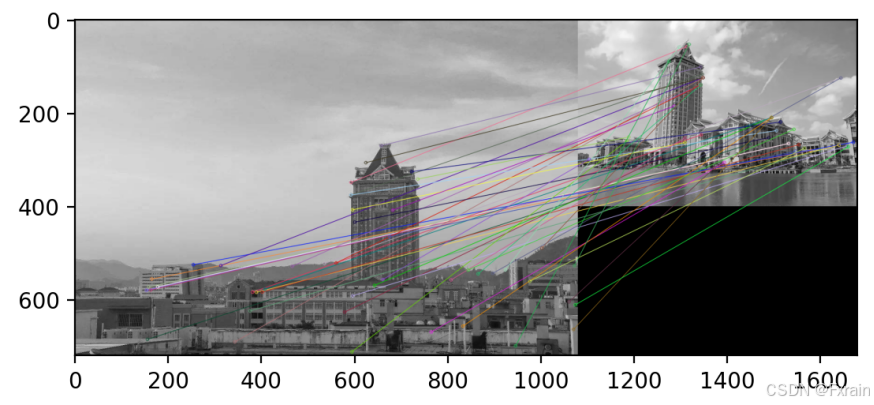
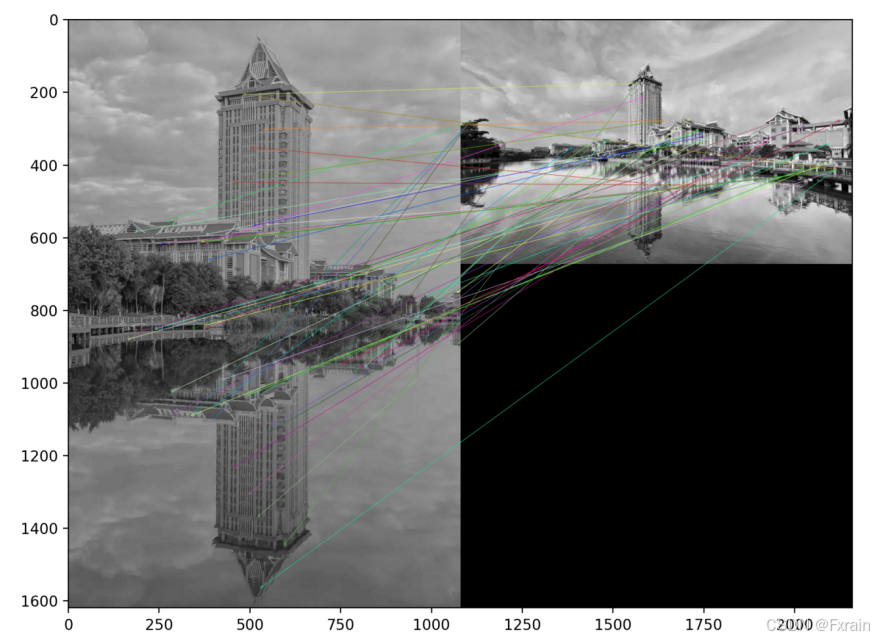
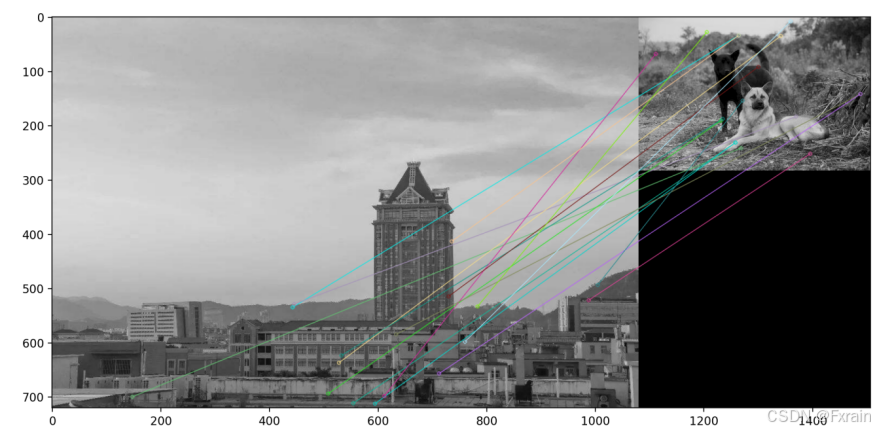
如图11所示,使用OpenCV库中的SIFT算法来检测和计算图像的特征点和描述符,然后使用FLANN匹配器进行特征点匹配。最后将匹配结果绘制在一幅图像上并显示出来。当使用其他两幅相似的匹配图像时,结果如图12所示。当使用两幅不相似的图像时,结果如图13所示。当如果第一个匹配的距离小于第二个匹配距离的0.75倍,即(m.distance < 0.75*n.distance),匹配结果良好,当匹配距离的倍数过大或过小,会导致匹配结果较差(如图14、15)
三、实验小结
Harris角点检测产生的特征点为角点的位置信息,SIDT特征提取为每个特征点生成描述子,包括特征点的方向、尺度等信息。实验中发现,当图像发生缩放、亮度等变换时,Harris角点检测可能会丢失一些角点或产生新的角点,SIFT特征提取具有一定的鲁棒性。
相关文章:
[Computer Vision]实验二:图像特征点提取
目录 一、实验内容 二、实验过程及结果 2.1 Harris角点检测 2.2 SIFT算法 三、实验小结 一、实验内容 采用Harris与SIFT分别提取特征点及对应的描述子,对比两者的区别(特征点数量、分布、描述子维度、图像变化对二者的影响等)利用特征匹…...

TCP状态转移图详解
状态 描述 LISTEN represents waiting for a connection request from any remote TCP and port. SYN-SENT represents waiting for a matching connection request after having sent a connection request. SYN-RECEIVED represents waiting for a confirming connect…...

curl简介与libcurl开源库的使用总结
curl工具和libcurl不是同一个东西,二者的关系主要体现在以下方面: 定义与性质 curl工具: 是一个利用URL语法在命令行下工作的文件传输工具,1997年首次发行。它支持多种协议,如HTTP、HTTPS、FTP、FTPS等,可用…...

Win10系统部署RabbitMQ Server
文章目录 版本说明依赖安装添加Erlang环境变量验证Erlang安装 RabbitMQ Server安装解压启动查看RabbitMQ插件安装rabbitmq_management插件再次启动设置RabbitMQ为系统服务 版本说明 ErlangRabbitMQ27.24.0.5 可以在Erlang官网和RabbitMQ官网下载安装包,安装已下载…...
里的方法)
uniapp APP端页面触发调用webview(页面为uniapp开发的H5)里的方法
原理: 使用 getCurrentInstance() 获取当前组件的 Vue 实例,通过 instance.proxy.$scope.$getAppWebview() 获取 Uniapp 的原生 WebView 对象。 使用 WebView 提供的 evalJS 方法,执行嵌入 H5 页面内的 JavaScript 代码 <template>&l…...

嵌入式知识点总结 C/C++ 专题提升(七)-位操作
针对于嵌入式软件杂乱的知识点总结起来,提供给读者学习复习对下述内容的强化。 目录 1.位操作基础 2.如何求解整型数的二进制表示中1的个数 ? 3.如何求解二进制中0的个数 4.交换两个变量的值,不使用第三个变量。即a3,b5,交换之后a5,b3: 5.给定一个…...

新星杯-ESP32智能硬件开发--ESP32的I/O组成
本博文内容导读📕🎉🔥 ESP32系统的基础外设开发:IO_MUX和GPIO矩阵 IO_MUX和GPIO矩阵 ESP32的I/O组成了与外部世界交互的基础,ESP32芯片有34个物理GPIO引脚。每个引脚都可用作一个通用I/O,或者连接一个内部…...

航空航天混合动力(7)航空航天分布式电推进系统
航空航天分布式电推进系统 1.概述2.分布式电推进系统组成3.关键技术4.分布式电推进系统优势5.国内外研究情况5.1 国外5.2 国内6.分布式电推进系统应用场景6.1 航空领域6.2 航天领域tips:资料来自网上,仅供参考学习使用 1.概述 分布式推进系统是指飞行器推力由位于整个航空器…...

AIGC视频生成明星——Emu Video模型
大家好,这里是好评笔记,公主号:Goodnote,专栏文章私信限时Free。本文详细介绍Meta的视频生成模型Emu Video,作为Meta发布的第二款视频生成模型,在视频生成领域发挥关键作用。 🌺优质专栏回顾&am…...

Cyber Security 101-Security Solutions-Firewall Fundamentals(防火墙基础)
了解防火墙并亲身体验 Windows 和 Linux 内置防火墙。 任务1:防火墙的用途是什么 我们看到商场、银行、 餐馆和房屋。这些警卫被安置在 这些区域用于检查进出人员。这 维护此检查的目的是确保没有人在没有 被允许。这个警卫充当了他所在区域和访客之间的一堵墙。 …...

备赛蓝桥杯之第十五届职业院校组省赛第一题:智能停车系统
提示:本篇文章仅仅是作者自己目前在备赛蓝桥杯中,自己学习与刷题的学习笔记,写的不好,欢迎大家批评与建议 由于个别题目代码量与题目量偏大,请大家自己去蓝桥杯官网【连接高校和企业 - 蓝桥云课】去寻找原题࿰…...

Docker核心命令与Yocto项目的高效应用
随着软件开发逐渐向分布式和容器化方向演进,Docker 已成为主流的容器化技术之一。它通过标准化的环境配置、资源隔离和高效的部署流程,大幅提高了开发和构建效率。Yocto 项目作为嵌入式 Linux 系统构建工具,与 Docker 的结合进一步增强了开发…...

idea plugin插件开发——入门级教程(IntelliJ IDEA Plugin)
手打不易,如果转摘,请注明出处! 注明原文:idea plugin插件开发——入门级教程(IntelliJ IDEA Plugin)-CSDN博客 目录 前言 官方 官方文档 代码示例 开发前必读 Intellij、Gradle、JDK 版本关系 plu…...

61,【1】BUUCTF WEB BUU XSS COURSE 11
进入靶场 左边是吐槽,右边是登录,先登录试试 admin 123456 admiin# 123456 admin"# 123456 不玩了,先去回顾下xss 回顾完就很尴尬了,我居然用SQL的知识去做xss的题 重来 吐槽这里有一个输入框,容易出现存储型…...

开发环境搭建-1:配置 WSL (类 centos 的 oracle linux 官方镜像)
一些 Linux 基本概念 个人理解,并且为了便于理解,可能会存在一些问题,如果有根本上的错误希望大家及时指出 发行版 WSL 的系统是基于特定发行版的特定版本的 Linux 发行版 有固定组织维护的、开箱就能用的 Linux 发行版由固定的团队、社…...
)
Spring Boot MyBatis Plus 版本兼容问题(记录)
Spring Boot & MyBatis Plus 版本兼容问题(Invalid value type for attribute factoryBeanObjectType: java.lang.String) 问题描述问题排查1. 检查 MapperScan 的路径2. 项目中没有配置 FactoryBean3. 检查 Spring 和 MyBatis Plus 版本兼容性 解决…...

26. 【.NET 8 实战--孢子记账--从单体到微服务】--需求更新--用户注销、修改用户名、安全设置
在实际开发过程中,项目需求的变更和增加是常见的情况,因此这篇文章我们就模拟一下项目需求新增的情况。 一、需求 项目经理今天提出了新的功能,需要增加重置密码、安全设置、修改用户名、注销账户这四个功能,这四个功能必须是独…...
神经网络|(一)加权平均法,感知机和神经元
【1】引言 从这篇文章开始,将记述对神经网络知识的探索。相关文章都是学习过程中的感悟和理解,如有雷同或者南辕北辙的表述,请大家多多包涵。 【2】加权平均法 在数学课本和数理统计课本中,我们总会遇到求一组数据平均值的做法…...

OpenHarmony OTA升级参考资料记录
OpenHarmony 作为一个开源分布式操作系统,通过其强大的 OTA(Over-The-Air)升级能力,为开发者和厂商提供了一套灵活而安全的系统升级方案。 OTA升级方式 根据升级包的应用方式,OpenHarmony 的 OTA 升级可以分为两种:本地升级和网络OTA升级。 本地升级 本地升级是将已制作…...

在 Kubernetes 上快速安装 KubeSphere v4.1.2
目录标题 安装文档配置repo安装使用插件 安装文档 在 Kubernetes 上快速安装 KubeSphere 配置repo export https_proxy10.10.x.x:7890 helm repo add stable https://charts.helm.sh/stable helm repo update安装 helm upgrade --install -n kubesphere-system --create-name…...

LLM API安全攻防实战:从提示词注入到自动化测试方案
1. 项目概述:被忽视的LLM API安全前线最近在帮几个团队做上线前的安全审计,发现一个挺有意思的现象:大家对于传统API的鉴权、限流、SQL注入这些常规检查已经形成了肌肉记忆,但一旦涉及到LLM(大语言模型)的A…...

搞定这 5 个全栈电商项目,面试别再用 Todo-List 凑数了
找独立开发练手项目或者写简历项目时,最忌讳两件事:一是太简单(纯前端 Mock 数据,点两下就没了),二是太假(一上来就硬套微服务、消息队列、高并发,结果自己根本Hold不住)…...

2026年一键生成论文工具对比实测:5款神器从选题到格式全流程护航
写论文的焦虑,是每个科研人和学生都心照不宣的“隐形压力”。选题无从下手,文献检索耗时费力,逻辑框架反复推翻,格式排版让人抓狂,查重降重更是像在和系统玩“猫鼠游戏”。2026年的AI工具早已不是过去那种“打字机”&a…...

终极Node.js Mock工具:Mockery入门到精通实战教程
终极Node.js Mock工具:Mockery入门到精通实战教程 【免费下载链接】mockery Simplifying the use of mocks with Node.js 项目地址: https://gitcode.com/gh_mirrors/mock/mockery Mockery是Node.js生态中简化Mock使用的终极工具,它为开发者提供了…...

告别Postman!用APIfox搞定接口测试+自动化,这份保姆级教程带你从环境配置到报告生成
从Postman到APIfox:接口测试自动化的高效迁移指南如果你还在为接口测试中的重复劳动和多环境切换头疼,是时候考虑从Postman迁移到APIfox了。作为一名经历过这个转型过程的开发者,我想分享一些实战经验,帮助你平滑过渡并最大化利用…...

别再只用递归了!用C语言栈实现非递归快速排序,内存效率提升实战
从递归到迭代:C语言栈实现非递归快速排序的工程实践 在嵌入式开发和大规模数据处理场景中,递归实现的快速排序常常面临栈溢出风险。当排序10万个元素的数组时,递归深度可能达到log₂100000≈17层,在仅有2KB栈空间的STM32F103上极易…...

从无线破解到PDF解密:盘点那些容易被忽略的‘非主流’密码审计场景与工具
密码安全审计的隐秘战场:从无线网络到加密文档的实战指南 当大多数人谈论密码安全时,脑海中浮现的往往是服务器登录、数据库访问这些企业级场景。然而在数字生活的每个角落,从家庭Wi-Fi到工作文档,密码保护的脆弱性同样可能成为安…...

基于Atmega 1284P的16位复古计算器:硬件设计与软件实现全解析
1. 项目概述与核心思路最近在整理工作室时,翻出了一堆老旧的7段数码管和矩阵键盘,看着这些充满复古气息的元件,一个想法冒了出来:为什么不自己动手做一台复古风格的计算器呢?不是那种用液晶屏显示的现代计算器…...

基于CNN的食双星光变曲线自动化参数初估模型EBOP MAVEN
1. 项目概述与核心价值在恒星天体物理领域,食双星系统一直扮演着“宇宙实验室”的关键角色。通过分析两颗恒星相互绕转时周期性相互遮挡产生的光变曲线,我们可以像解谜一样,精确反演出恒星的质量、半径、轨道倾角等基本物理参数。这些参数是构…...

3步掌握B站缓存视频转换:m4s-converter完整指南
3步掌握B站缓存视频转换:m4s-converter完整指南 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否在B站缓存了大量珍贵的学习资料…...