面向通感一体化的非均匀感知信号设计
文章目录
- 1 非均匀信号设计的背景分析
- 1.1 基于OFDM波形的感知信号
- 1.2 非均匀信号设计的必要性和可行性
- 1.2 非均匀信号设计的必要性和可行性
- 3 通感一体化系统中的非均匀信号设计方法
- 3.1 非均匀信号的设计流程
- (1)均匀感知信号设计
- (2)非均匀采样
- 3.2 时频资源的链路自适应方法
- 4 非均匀感知信号的样机测试验证
- (1)均匀信号设计
- (2)基于谱分析的非均匀信号设计
1 非均匀信号设计的背景分析
在通感一体化系统中,一种典型的感知信号处理是,首先通过复用通信参考信号处理的信道估计及其前序步骤得到感知信道信息,然后通过二维快速傅里叶变换(2D-FFT, 2-dimensional Fast Fourier Transform)将感知信道信息从时间-频率域变换到时延 - 多普勒域 [13],以进行后续的感知信号处理。时延 - 多普勒谱的性能是衡量感知信号设计的重要指标。
1.1 基于OFDM波形的感知信号
在感知应用中,进行一次感知信号处理所对应的感知信号的时间长度为相干处理时长 (CPI, Coherent Processing Interval) [14]。设在一个CPI的时间跨度内,包含 M t M_t Mt个OFDM符号,并且每个OFDM符号包含 N t N_t Nt个子载波,则发送的时域信号可以表示为[15]:
x ( t ) = ∑ m = 0 M t − 1 ∑ n = 0 N t − 1 X ( m , n ) e j 2 π n t Δ f t u ( t − m T ) (1) x(t) = \sum_{m=0}^{M_t-1} \sum_{n=0}^{N_t-1} X(m,n) e^{j 2 \pi n_t \Delta f t} u(t - mT) \tag{1} x(t)=m=0∑Mt−1n=0∑Nt−1X(m,n)ej2πntΔftu(t−mT)(1)
其中, Δ f \Delta f Δf表示子载波间隔, u ( t ) u(t) u(t)表示脉冲成型函数, T T T表示一个OFDM符号的持续时长(包括循环前缀 (CP, Cyclic Prefix)), X ( m , n ) X(m,n) X(m,n)为第 m m m个OFDM符号中第 n n n个子载波上的调制符号。需要说明的是,这里的 M t M_t Mt个OFDM符号包括了一个CPI时间范围内的感知信号和通信信号所占用的全部OFDM符号; N t N_t Nt子载波包括信号和感知信号所占用的全部子载波。因此, N t N_t Nt也是发送信号从频域转换到时域的逆快速傅里叶变换 (IFFT, Inverse Fast Fourier Transform) 的点数。
设从感知信号的发射机到接收机之间存在 K K K个路径,每个路段的延迟和多普勒频分别为 τ k \tau_k τk 和 ν k \nu_k νk,则经过 K K K个路段的反射后,接收机的接收信号为:
y ( t ) = ∑ k = 0 K − 1 ρ k x ( t − τ k ) e j 2 π υ k t + n ( t ) (2) y\begin{pmatrix}t\end{pmatrix}=\sum_{k=0}^{K-1}\sqrt{\rho_k}x\begin{pmatrix}t-\tau_k\end{pmatrix}\mathrm{e}^{\mathrm{j}2\pi\upsilon_kt}+n\begin{pmatrix}t\end{pmatrix}\tag{2} y(t)=k=0∑K−1ρkx(t−τk)ej2πυkt+n(t)(2)
其中, ρ k \rho_k ρk表示第 k k k个路段的功率衰减系数, n ( t ) n(t) n(t)为方差为 σ n 2 \sigma_n^2 σn2的高斯白噪声。
接收机以采样率 N A Δ f N_A \Delta f NAΔf 进行时域信号采样,然后去除CP,并通过快速傅里叶变换 (FFT, Fast Fourier Transform) 将时域信号转换到频域,可以表示为:
Y ( m t , n t ) = ∑ k = 0 K − 1 ρ k X ( m t , n t ) e − j 2 π n t Δ f τ k e j 2 π m t T ν k + Ω ( m t , n t ) (3) Y(m_t,n_t) = \sum_{k=0}^{K-1} \sqrt{\rho_k} X(m_t,n_t) e^{-j 2 \pi n_t \Delta f \tau_k} e^{j 2 \pi m_t T \nu_k} + \Omega(m_t,n_t) \tag{3} Y(mt,nt)=k=0∑K−1ρkX(mt,nt)e−j2πntΔfτkej2πmtTνk+Ω(mt,nt)(3)
其中, Ω ( m t , n t ) \Omega(m_t,n_t) Ω(mt,nt)表示频域上的高斯白噪声。
考虑感知信号占用的子载波和OFDM符号均均匀地分布在上述的 N t N_t Nt 子载波和 M t M_t Mt 个OFDM符号中,且感知信号占用的子载波引索间隔为 δ f \delta_f δf,感知信号占用的OFDM符号索引间隔为 δ t \delta_t δt。不失一般性,考虑感知信号占用的子载波从 n = 0 n=0 n=0开始,感知信号占用的OFDM符号从 m = 0 m=0 m=0开始。另外,记感知信号占用的子载波数和OFDM符号数分别为 N s N_s Ns和 M s M_s Ms。感知信号的频率资源图如图1所示:

这里图片中 δ f \delta_f δf 和 δ t \delta_t δt 错误成了 η f \eta_f ηf 和 η t \eta_t ηt
1.2 非均匀信号设计的必要性和可行性
由于感知信号的频域位置和调制序列是已知的,可以通过信道道估计消除调制序列的影响,获得感知信道信息,表示为:
H ( m t , n t ) = Y ( m t , n t ) X ( m t , n t ) = ∑ k = 0 K − 1 ρ k e − j 2 π n t Δ f τ k e j 2 π m t T υ k , ( m t , n t ) ∈ S (4) \begin{aligned}H\begin{pmatrix}m_t,n_t\end{pmatrix}&=\frac{Y\left(m_t,n_t\right)}{X\left(m_t,n_t\right)}\\&=\sum_{k=0}^{K-1}\sqrt{\rho_k}\mathrm{e}^{-\mathrm{j}2\pi n_t\Delta f\tau_k}\mathrm{e}^{\mathrm{j}2\pi m_tT\upsilon_k},\left(m_t,n_t\right)\in\mathbb{S}\end{aligned} \tag{4} H(mt,nt)=X(mt,nt)Y(mt,nt)=k=0∑K−1ρke−j2πntΔfτkej2πmtTυk,(mt,nt)∈S(4)
其中,集合 S \mathbb{S} S 表示感知信号占用的资源元素 (RE, Resource Element) 集合。对式(4)的感知信号执行2D-FFT运算可以得到时延-多普勒谱。
对于OFDM波形,2D-FFT运算包括:沿频率维执行IFFT将各个OFDM符号上的感知信道信息从频域转换到时域,然后通过FFT将各个时域单元上的数据从时域转换到多普勒域,最终得到的时延-多普勒图可以表示为:
R ( p , q ) = 1 N s M s ∑ k = 0 K − 1 ∑ n s = 0 N s − 1 ∑ m s = 0 M s − 1 ρ k e j 2 π n s ( p N s − δ f Δ f τ k ) e j 2 π m s ( δ t T υ k − q M s ) (5) \mathbf{R}\left(p,q\right)=\frac{1}{N_{s}M_{s}}\sum_{k=0}^{K-1}\sum_{n_{s}=0}^{N_{s}-1}\sum_{m_{s}=0}^{M_{s}-1}\sqrt{\rho_{k}}\mathrm{e}^{\mathrm{j}2\pi n_{s}\left(\frac{p}{N_{s}}-\delta_{f}\Delta f\tau_{k}\right)}\mathrm{e}^{\mathrm{j}2\pi m_{s}\left(\delta_{t}T\upsilon_{k}-\frac{q}{M_{s}}\right)} \tag{5} R(p,q)=NsMs1k=0∑K−1ns=0∑Ns−1ms=0∑Ms−1ρkej2πns(Nsp−δfΔfτk)ej2πms(δtTυk−Msq)(5)
1.2 非均匀信号设计的必要性和可行性
均匀感知信号的时频资源配置参数包括:感知信号占用的子载波数 N t N_t Nt、OFDM符号数 M t M_t Mt、子载波索引间隔 δ f \delta_f δf和OFDM符号索引间隔 δ t \delta_t δt。均匀感知信号的信号配置和应应用信号处理算法简单,并且具有较好的感知性能。然而,在实际的一体化场景下,均匀感知信号具有如下的特点:
- 资源开销较大:为了满足时延分辨率和多普勒频移辨识率的需求,感知信号通道需要在频域上占较大的带宽,在时域上占较大的时长。例如,为了满足对行人和车辆等目标的测量,感知信号带宽需要在百 MHz 量级以上,CPI 通常需要在十 ms 至百 ms 量级。同时,为了满足最大不模糊时延和最大不模糊多普勒的要求,感知信号所占的子载波搜索间隔 δ f \delta_f δf 和 OFDM 符号搜索间隔 δ t \delta_t δt 需要小于一定的数值,即使得感知信号在频域和时域满足奈奎斯特条件。因此,感知信号所占用的子载波数和 OFDM 符号数较多。进一步地,在终端的场景下,感知信号所占用的 RE 数随终端数线性增加,如图 2(a) 所示,32 端口的信道状态信息参考信号(CSI-RS,Channel State Information Reference Signal)在一个时隙,一个资源块(RB,Resource Block)中占了较多的 RE,如果在时域上每个时隙,频域上的每个 RB 重复这样的资源占用,那么其资源开销非常大。

- 信号配置灵活性差:为了实现高分辨率的感知,感知信号的时频资源的跨频段大,并且均匀采样的感知信号需要占用周期性的信号资源。在通常一体化的场景下,同时存在多种多样的通信业务(包括低时延高可靠业务和感知业务),对应地存在各种信号和信道的专用,很难保证此时特定周期重复的信号资源都能配置给感知信号。另一方面,在通常一体化的场景下,如果能较有效分配现有频谱(NR,New Radio)的参考信号,将会大大减少感知的资源开销,加速感知能力的落地。然而,现在在所有的各参考信号根据通信业务的需求设计,在较大的时隙跨上依然会通常是非均匀分布的,这就无法实现均匀采样的感知信号配置,如图 2(b) 所示。
在感知应用中,感知目标在时延和多普勒频移通常是稀疏的,那么可以在低于奈奎斯特采样率的采样点重建信号。也就是说,可以采用非均匀信号执行感知业务,从而克服上述均匀感知信号的挑战。
从信号处理的角度说,频域或时域的均匀信号设计,对应着时频资源均匀的周频特性移动;当均匀信号是奈奎斯特采样时,周期性搬移的时延或多普勒搬移不会发生混叠。而对于频域或时域的非均匀信号设计,则对应时延或多普勒频移的非周期性搬移,会发生一定程度上的时延或多普勒频移的混叠。时延或多普勒频移的混叠对于感知性能的影响可以通过式(5)的时延-多普勒频率考察。
对于均匀信号,式(5)中的 n s n_s ns 和 m s m_s ms 的取值是连续的非负整数,对于给定的子载波查询间隔 δ f \delta_f δf 和 OFDM 符号查询间隔 δ t \delta_t δt,能够根据式(5)直接导出感知的最大不模糊时延和最大不模糊多普勒频移分析 [16]。
τ max = 1 / δ f Δ f and υ max = 1 / δ t T \tau_{\text{max}} = 1/\delta_f \Delta f \quad \text{and} \quad \upsilon_{\max}=1/\delta_{t}T τmax=1/δfΔfandυmax=1/δtT
在均匀信号的基础上,通过抽取的方式将式(5)中的 n s n_s ns 和 m s m_s ms 的取值设置成不连续的非负整数,则为非均匀信号。考虑式(5)中的时延-多普勒频移的峰值对应的时延或多普勒值与 n s n_s ns 和 m s m_s ms 的连续性无关,因此,通过这种方法构造出的非均匀信号与对应的均匀信号具有相同的最大不模糊时延和最大不模糊多普勒。需要注意的是,这里是指非均匀信号占用的子载波或 OFDM 符号是由对均匀信号占用的子载波或 OFDM 符号进行非周期性抽取得到的,而如果是有显著的周期性抽取则上述子载波查询间隔 δ f \delta_f δf 或 OFDM 符号查询间隔 δ t \delta_t δt 的取值发生变化,则该结论不再成立。

图 3 显示了在时间维度采用非均匀信号设计的一个示例,非均匀信号与对应均匀信号的多普勒频移的对比,其中感知目标的多普勒为 0。在该示例中,均匀信号包含周期分布的 M s = 80 M_s = 80 Ms=80 个 OFDM 符号,非均匀信号则从中随机抽取的 40 个 OFDM 符号。除去由于更少的 OFDM 符号引起峰值的降低以外,非均匀信号的多普勒中还存在在于抑制信号,在相关文献中被称为伪影。
3 通感一体化系统中的非均匀信号设计方法
在通感一体化系统中,需要根据感知需求进行感知信号的时频资源分配。另一方面,在感知业务的实际执行过程中,感知需求会根据感知结果发生变化,这意味着需要对感知信号的时频资源进行链路自适应调整。
3.1 非均匀信号的设计流程
为了使得非均匀感知信号能够较好满足感知需求中分辨率能力和最大不模糊量程范围的要求,本文提出非均匀感知信号的两步设计方法:首先进行均匀感知信号的设计,然后基于均匀感知信号进行非均匀采样得到非均匀感知信号。
(1)均匀感知信号设计
给定感知需求,采用均匀信号设计,感知信号子载波查询间隔 δ f \delta_f δf,感知信号占用的子载波数 N s N_s Ns,感知信号的 OFDM 符号查询间隔 δ t \delta_t δt,感知信号占用的 OFDM 符号数 M s M_s Ms,需要满足:
δ f ≤ ⌊ 1 τ max Δ f ⌋ (14) \delta_f \leq\left\lfloor \frac{1}{\tau_{\text{max}} \Delta f} \right\rfloor \tag{14} δf≤⌊τmaxΔf1⌋(14)
N s δ f ≥ ⌈ 1 Δ τ Δ f ⌉ (15) N_s \delta_f \geq \left\lceil \frac{1}{\Delta \tau \Delta f} \right\rceil \tag{15} Nsδf≥⌈ΔτΔf1⌉(15)
δ t ≤ ⌊ 1 υ max T ⌋ (16) \delta_t\leq\left\lfloor\frac{1}{\upsilon_{\max}T}\right\rfloor \tag{16} δt≤⌊υmaxT1⌋(16)
M s δ t ≥ ⌈ 1 Δ ν T ⌉ (17) M_s \delta_t \geq \left\lceil \frac{1}{\Delta \nu T} \right\rceil \tag{17} Msδt≥⌈ΔνT1⌉(17)
其中, τ max \tau_{\text{max}} τmax 和 Δ τ \Delta \tau Δτ 分别表示感知需求中要求的最大不模糊时延和时延分辨率, v max v_{\text{max}} vmax 和 Δ ν \Delta \nu Δν 分别表示感知需求中要求的最大不模糊多普勒和多普勒分辨率。
如果式(14)~(17)中的不等式取等号,则能够得到占用频资源最少的均匀信号设计。在实际信号配置中,上述参数数还会受到协议允许的参数数值的限制。以 NR 协议中的 CSI-RS 进行感知信号的配置为例,则感知信号子载波间隔 δ f \delta_f δf(用协议中参数可表示为 12/density)只能取值为 4、12 或 24 [31]。
(2)非均匀采样
根据前文所述的均匀信号的设计方法,从均匀信号占用的时频资源中进行非均匀采样,选择出一部分子载波或 OFDM 符号以承载感知信号,实现非均匀感知信号设计,如图 10 所示。与均匀信号相比,非均匀信号能够减少小感知信号占用的信号资源数,并能够避免其他部分子载波或 OFDM 符号以避免与其他信号的冲突。

3.2 时频资源的链路自适应方法
时频资源的链路自适应方法是根据实时的感知性能需求对感知信号占用的时频资源进行调整,减少感知信号占用的时频资源数值下降开销,或是增加大感知信号占用的时频资源数以提高感知性能。非均匀感知信号采用 3.1 节的两步设计方法,为时频资源的链路自适应提供了一个额外的自由度。
非均匀感知信号时频资源的链路自适应方法包括:均匀感知信号的链路自适应调节,非均匀采样的链路自适应调节。其中,均匀感知信号的链路自适应调节通过上述参数( δ \delta δ, N s N_s Ns, δ t \delta_t δt, M s M_s Ms)进行调节 [32],满足对感知目标的分辨率和最大不模糊量程范围的需求,以及满足感知精度的需求;感知精度可以通过前文所述的感知 SINR 来刻画。非均匀采样的链路自适应调节通过非均匀采样序列的调节,能够满足对感知目标量程和感知精度的需求,包括:
-
满足感知目标数目的需求:当环境中存在的感知目标(包括非感知目标的反射路径)的数目较小时,非均匀采样数 M M M 的值可以适当减少,从而能够节约更多的时频资源;反之,当感知目标的数目增大时,应相应增大 M M M 的值,以保证非均匀感知的自由度。
-
满足感知精度的需求:当感知精度性能较好时,在满足自由度的前提下,可适当减少非均匀采样数 M M M 的值,从而能够节约信号资源;而当感知精度性能较差时,应增大非均匀采样数 M M M 的值,以提升感知性能;在极端情况下,应将非均匀采样数 M M M 的值调整为均匀采样数 N N N,即不采用均匀信号设计。
结合感知目标数量和感知精度的需求,非均匀采样数 M M M 的值的取值情况如图 11 所示。在感知精度性能较好且感知目标数较小, M M M 可以取较小值;在感知精度性能较差且感知目标数较大时, M M M 必须取较大值。
这部分原论文有着明显的校对错误,M N 打错了
4 非均匀感知信号的样机测试验证
为了更直观地展示在时频域采用非均匀感知信号设计的可行性和性能,本文针对第 2 节中介绍的三种非均匀信号设计方法,采用 vivo 自研的通感一体化样机进行测试,并与均匀信号设计进行对比。在样机测试中,以行人作为感知目标。样机的硬件配置可参见文献 [33],作为非均匀信号设计基础的均匀信号的参数如表 1 所示。
表中的参数,感知信号带宽为 384 MHz,感知子载波之间的间隔为 4.8 MHz,对应的时延分辨率为 2.6 ns,最大不模糊时延范围为 208.3 ns;感知信号 CPI 为 200 ms,感知 OFDM 符号之间的间隔为 2.5 ms,对应的多普勒分辨率为 5 Hz,最大不模糊多普勒频移范围为 400 Hz。上述参数给出的感知性能能够满足室内行人感知的需求。

由于环境中存在大量的静态物体(如墙壁、地面)的反射,为了对运动感知目标进行检测,采用杂波对消方法消除静态物体反射回波的影响,具体方法参见文献 [33]。
(1)均匀信号设计
作为对照的基线,图 12(a) 显示了在采用均匀信号配置时,对行人进行感知所得到的时延-多普勒谱,在(30 Hz, 68 ns) 处的谱峰为感知目标对应的时延-多普勒单元,其感知 SINR 约为 38.2 dB。根据恒虚警检测理论中的单元平均方法设置参考窗用以统计噪声加干扰功率[34],在时延维和多普勒维的前参考窗和后参考窗长度均设为 6、保护单元数设置为 1,得到感知 SINR 约为 41.2 dB。很明显时延-多普勒谱在多普勒维是稀疏的。进一步地,图 12(b) 显示了在时间维 FFT 之前的时延,感知信号在时延维也具有稀疏性,其稀疏程度低于多普勒维的稀疏程度。因此,在时延维可以采用 M / N M/N M/N 值较小的均匀信号,而在频率维则需要采用 M / N M/N M/N 值稍大的均匀信号。
这段话我没太听懂

(2)基于谱分析的非均匀信号设计
由于感知信号在时延维的稀疏度低于多普勒维的稀疏程度,这是由于频率集均匀信号中 80 个载波中取得 40 个载波,在时间维从均匀信号的 0 个子载波中取得 23 个载波,再构造出均匀信号。与均匀信号相比,非均匀信号能够节省 85.3%的资源开销,感知目标对应的信号功率降低约 8.4 dB。如 1.1 节所述,为了得到影响功率低的非均匀信号,需要通过序列搜索的方式得到非均匀采样序列,这里在频率维的非均匀采样序列同图 4(a)。
相关文章:
面向通感一体化的非均匀感知信号设计
文章目录 1 非均匀信号设计的背景分析1.1 基于OFDM波形的感知信号1.2 非均匀信号设计的必要性和可行性1.2 非均匀信号设计的必要性和可行性 3 通感一体化系统中的非均匀信号设计方法3.1 非均匀信号的设计流程(1)均匀感知信号设计(2࿰…...

修改docker共享内存shm-size
法1:在创建容器时增加共享内存大小 nvidia-docker run -it -p 10000:22 --name"zm" -v /home/zm:/data ufoym/deepo:all-cu101 /bin/bash --shm-size20G法2:修改正在运行的容器的共享内存设置 查看容器、共享内存 docker ps -a df -lh | gr…...

WIN11 UEFI漏洞被发现, 可以绕过安全启动机制
近日,一个新的UEFI漏洞被发现,可通过多个系统恢复工具传播,微软已经正式将该漏洞标记为追踪编号“CVE-2024-7344”。根据报告的说明,该漏洞能让攻击者绕过安全启动机制,并部署对操作系统隐形的引导工具包。 据TomsH…...

网安加·百家讲坛 | 樊山:数据安全之威胁建模
作者简介:樊山,锦联世纪教育能源工业互联网数字安全CSM(新能源运维师)课程特聘培训讲师,哈尔滨工业大学(深圳)信飞合创数据合规联合实验室特聘专家,武汉赛博网络安全人才研究中心资深专家;近24年…...

jQuery阶段总结(二维表+思维导图)
引言 经过23天的学习,期间有期末考试,有放假等插曲。本来应该在学校里学习,但是特殊原因,让回家了。但是在家学习的过程,虽然在学,很让我感觉到不一样。但是效果始终还是差点的,本来17、18号左右…...
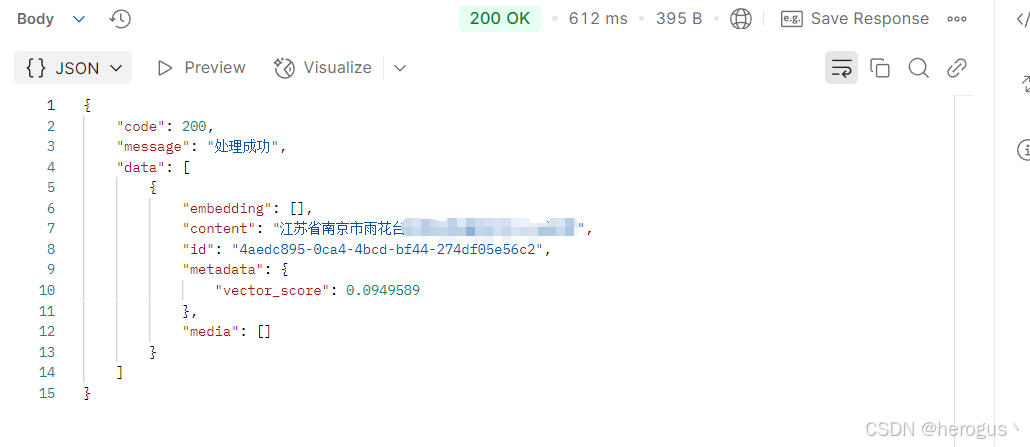
【LLM】RedisSearch 向量相似性搜索在 SpringBoot 中的实现
整理不易,请不要吝啬你的赞和收藏。 1. 前言 写这篇文章挺不容易的,网络上对于 SpringBoot 实现 Redis 向量相似性搜索的文章总体来说篇幅较少,并且这些文章很多都写得很粗糙,或者不是我想要的实现方式,所以我不得不阅…...
如何为64位LabVIEW配置正确的驱动程序
在安装 64位 LabVIEW 后,确保驱动程序正确配置是关键。如果您首先安装了 32位 LabVIEW 和相关驱动,然后安装了 64位 LabVIEW,需要确保为 64位 LabVIEW 安装和配置适当的驱动程序,才能正常访问硬件设备。以下是详细步骤:…...

Redis(5,jedis和spring)
在前面的学习中,只是学习了各种redis的操作,都是在redis命令行客户端操作的,手动执行的,更多的时候就是使用redis的api(),进一步操作redis程序。 在java中实现的redis客户端有很多,…...

Git 小白入门教程
🎯 这篇文章详细介绍了版本控制的重要性,特别是通过Git实现的分布式版本控制相对于SVN集中式控制的优势。文章首先解释了版本控制的基本概念,强调了在文档或项目多版本迭代中备份与恢复任意版本的能力。接着,重点阐述了Git的历史背…...
:神经网络与迁移学习在猫狗分类中的应用)
Python从0到100(八十五):神经网络与迁移学习在猫狗分类中的应用
在人工智能的浩瀚宇宙中,深度学习犹如一颗璀璨的星辰,引领着机器学习和计算机视觉领域的前沿探索。而神经网络,作为深度学习的核心架构,更是以其强大的数据建模能力,成为解决复杂问题的重要工具。今天,我们…...
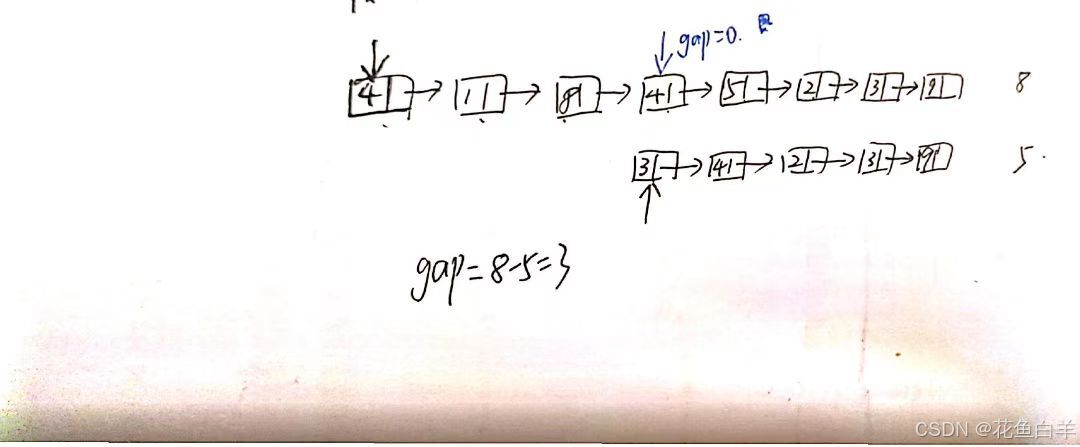
代码随想录刷题day14(2)|(链表篇)02.07. 链表相交(疑点)
目录 一、链表理论基础 二、链表相交求解思路 三、相关算法题目 四、疑点 一、链表理论基础 代码随想录 二、链表相交求解思路 链表相交时,是结点的位置,也就是指针相同,不是结点的数值相同; 思路:定义两个指针…...
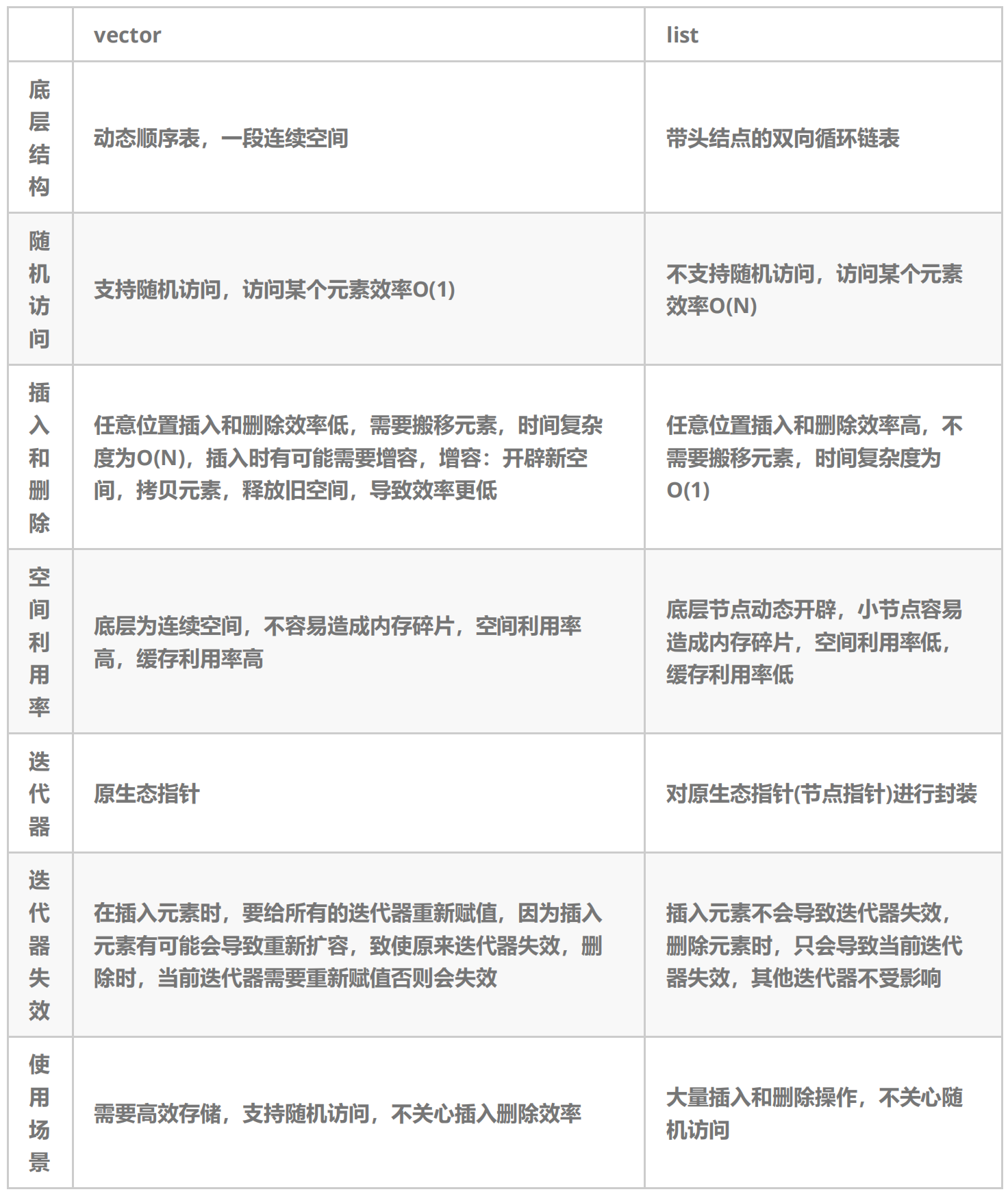
C++ 复习总结记录九
C 复习总结记录九 主要内容 1、list 介绍及使用 2、list 剖析及模拟实现 3、list 与 vector 对比 一 list 介绍及使用 List 相关文档 1、List 在任意位置进行插入和删除的序列式容器 O(1) ,且该容器可前后双向迭代 2、List 底层是带头双向循环链表ÿ…...
_SQL执行计划02_yxy)
数据库性能优化(sql优化)_SQL执行计划02_yxy
数据库性能优化_SQL执行计划详解02 常用操作符解读1.1 表扫描类型操作符1.1.1 CSCN 聚集索引扫描1.1.2 CSEK 聚集索引数据定位1.1.3 SSEK 二级索引数据定位1.1.4 SSCN 直接使用二级索引进行扫描1.2 其他常见操作符1.2.1 BLKUP 二次扫描1.2.2 SLCT 选择1.2.3 PRJT 投影1.2.4 NSE…...
Vivado生成X1或X4位宽mcs文件并固化到flash
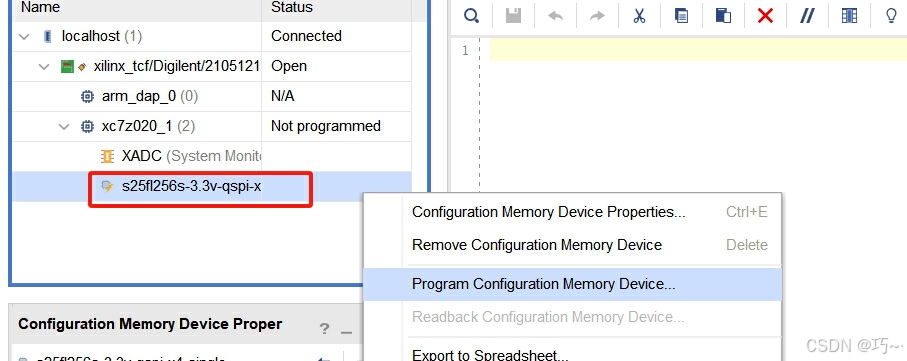
1.生成mcs文件 01.在vivado里的菜单栏选择"tools"工具栏 02.在"tools"里选择"生成内存配置文件" 03.配置参数 按照FPGA板上的flash型号进行选型,相关配置步骤可参考下图。 注意:Flash数据传输位宽如果需要选择X4位宽&am…...

在K8S中使用Values文件定制不同环境下的应用配置详解
在Kubernetes(简称K8s)环境中,应用程序的配置管理是一项关键任务。为了确保应用程序在不同环境(如开发、测试、预发布和生产)中都能稳定运行,我们需要为每个环境定制相应的配置。Values文件是在使用Helm管理…...

边缘网关具备哪些功能?
边缘网关,又称边缘计算网关,部署在网络边缘,它位于物联网设备与云计算平台之间,充当着数据流动的“守门员”和“处理器”。通过其强大的数据处理能力和多样化的通信协议支持,边缘网关能够实时分析、过滤和存储来自终端…...

ThinkPHP 8 操作JSON数据
【图书介绍】《ThinkPHP 8高效构建Web应用》-CSDN博客 《2025新书 ThinkPHP 8高效构建Web应用 编程与应用开发丛书 夏磊 清华大学出版社教材书籍 9787302678236 ThinkPHP 8高效构建Web应用》【摘要 书评 试读】- 京东图书 使用VS Code开发ThinkPHP项目-CSDN博客 编程与应用开…...

环境变量配置与问题解决
目录 方法 配置了还是运行不了想要的东西 解决方案 为什么 解决方案 方法 方法一:此电脑右击-属性-相关链接-高级系统设置-环境变量(N)-系统变量里面找到Path-三个确定】 方法二:winr cmd 黑框输入sysdm.cpl,后面…...

pytorch2.5实例教程
以下是再次为你提供的一个详细的PyTorch使用教程: 一、安装PyTorch 环境准备 确保系统已安装合适版本的Python(推荐3.10及以上)。 安装方式 CPU版本 对于Linux和macOS: 使用命令 pip install torch torchvision torchaudio。 对…...

【开源免费】基于SpringBoot+Vue.JS智慧图书管理系统(JAVA毕业设计)
本文项目编号 T 152 ,文末自助获取源码 \color{red}{T152,文末自助获取源码} T152,文末自助获取源码 目录 一、系统介绍二、数据库设计三、配套教程3.1 启动教程3.2 讲解视频3.3 二次开发教程 四、功能截图五、文案资料5.1 选题背景5.2 国内…...

MCP Server生产级配置:Playwright与LLM集成的避坑指南
1. 这不是又一个“Playwright入门教程”,而是一份能直接塞进CI流水线的MCP Server生产级配置实录你有没有遇到过这样的场景:团队刚决定用AI驱动自动化测试,技术选型会上大家一致看好Playwright MCP(Model Context Protocol&#…...

小米MIMO最新邀请码
欢迎使用,各得10元体验金...

TV Bro电视浏览器:为智能电视打造的最佳遥控器上网解决方案
TV Bro电视浏览器:为智能电视打造的最佳遥控器上网解决方案 【免费下载链接】tv-bro Simple web browser for android optimized to use with TV remote 项目地址: https://gitcode.com/gh_mirrors/tv/tv-bro 还在为智能电视上网操作不便而烦恼吗?…...

PS5 NOR Modifier深度解析:如何通过Windows工具修复PS5硬件故障与实现光驱版转数字版
PS5 NOR Modifier深度解析:如何通过Windows工具修复PS5硬件故障与实现光驱版转数字版 【免费下载链接】PS5NorModifier The PS5 Nor Modifier is an easy to use Windows based application to rewrite your PS5 NOR file. This can be useful if your NOR is corru…...

XZ6128A工作电压5-100V 输出电流5A 升压型大功率LED灯恒流驱动控制芯片
概述 XZ6128A是一款高效率、高精度的升压型大功率LED灯恒流驱动控制芯片。 XZ6128A内置高精度误差放大器,固定关断时间控制电路,恒流驱动电路等,特别适合大功率、多个高亮度LED灯串的恒流驱动。 XZ6128A采用固定关断时间的控制方式࿰…...

Cesium动态数据可视化实战:CallbackProperty结合setInterval打造实时运动轨迹
Cesium动态数据可视化实战:CallbackProperty结合setInterval打造实时运动轨迹 在三维地理信息系统中,实时数据可视化一直是开发者面临的挑战之一。想象一下,当我们需要在地球表面追踪一架正在飞行的无人机,或者监控城市中数百辆出…...

Python多智能体建模终极指南:用Mesa轻松构建复杂系统仿真
Python多智能体建模终极指南:用Mesa轻松构建复杂系统仿真 【免费下载链接】mesa Mesa is an open-source Python library for agent-based modeling, ideal for simulating complex systems and exploring emergent behaviors. 项目地址: https://gitcode.com/gh_…...

开源合规生死线,DeepSeek协议识别错误率高达63%?2024企业级扫描避坑清单全公开
更多请点击: https://intelliparadigm.com 第一章:开源合规生死线,DeepSeek协议识别错误率高达63%?2024企业级扫描避坑清单全公开 近期第三方审计机构对主流AI增强型开源扫描工具开展交叉验证测试,结果显示DeepSeek-R…...

如何免费破解百度网盘限速:Python直链解析工具终极指南
如何免费破解百度网盘限速:Python直链解析工具终极指南 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘的龟速下载而烦恼吗?想要免费享受…...

多模态融合在死因推断中的应用:特征级与决策级融合策略对比
1. 项目概述:当AI遇见死因推断,多模态融合如何破局?在公共卫生和流行病学领域,准确推断死因(Cause of Death, COD)是评估疾病负担、制定卫生政策的基础。然而,在资源有限的地区,获取…...