亚博microros小车-原生ubuntu支持系列:11手指控制与手势识别
识别框架还是沿用之前的了MediaPipe Hand。
背景知识不摘重复,参见之前的:亚博microros小车-原生ubuntu支持系列:10-画笔-CSDN博客
手指控制
src/yahboom_esp32_mediapipe/yahboom_esp32_mediapipe/目录下新建文件10_HandCtrl.py,代码如下:
#!/usr/bin/env python3
# encoding: utf-8
import math
import time
import cv2 as cv
import numpy as np
import mediapipe as mp
import rclpy
from rclpy.node import Node
from cv_bridge import CvBridge
from sensor_msgs.msg import Image, CompressedImagefrom rclpy.time import Time
import datetimevolPer = value = index = 0
effect = ["color", "thresh", "blur", "hue", "enhance"]
volBar = 400
class handDetector:def __init__(self, mode=False, maxHands=2, detectorCon=0.5, trackCon=0.5):self.tipIds = [4, 8, 12, 16, 20]self.mpHand = mp.solutions.handsself.mpDraw = mp.solutions.drawing_utilsself.hands = self.mpHand.Hands(#模型初始化static_image_mode=mode,max_num_hands=maxHands,min_detection_confidence=detectorCon,min_tracking_confidence=trackCon)self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=15)self.drawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 255, 0), thickness=10, circle_radius=10)#距离计算def get_dist(self, point1, point2):x1, y1 = point1x2, y2 = point2return abs(math.sqrt(math.pow(abs(y1 - y2), 2) + math.pow(abs(x1 - x2), 2)))#计算角度def calc_angle(self, pt1, pt2, pt3):point1 = self.lmList[pt1][1], self.lmList[pt1][2]point2 = self.lmList[pt2][1], self.lmList[pt2][2]point3 = self.lmList[pt3][1], self.lmList[pt3][2]a = self.get_dist(point1, point2)b = self.get_dist(point2, point3)c = self.get_dist(point1, point3)try:#余弦定理radian = math.acos((math.pow(a, 2) + math.pow(b, 2) - math.pow(c, 2)) / (2 * a * b))angle = radian / math.pi * 180#弧度转角度except:angle = 0return abs(angle)def findHands(self, frame, draw=True):img = np.zeros(frame.shape, np.uint8)img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB)#图像格式转换self.results = self.hands.process(img_RGB)#检测if self.results.multi_hand_landmarks:for handLms in self.results.multi_hand_landmarks:#输出关键点if draw: self.mpDraw.draw_landmarks(img, handLms, self.mpHand.HAND_CONNECTIONS)return imgdef findPosition(self, frame, draw=True):self.lmList = []if self.results.multi_hand_landmarks:for id, lm in enumerate(self.results.multi_hand_landmarks[0].landmark):# print(id,lm)h, w, c = frame.shapecx, cy = int(lm.x * w), int(lm.y * h)# print(id, lm.x, lm.y, lm.z)self.lmList.append([id, cx, cy])#记录指点序号与坐标if draw: cv.circle(frame, (cx, cy), 15, (0, 0, 255), cv.FILLED)return self.lmListdef frame_combine(slef,frame, src):if len(frame.shape) == 3:frameH, frameW = frame.shape[:2]srcH, srcW = src.shape[:2]dst = np.zeros((max(frameH, srcH), frameW + srcW, 3), np.uint8)dst[:, :frameW] = frame[:, :]dst[:, frameW:] = src[:, :]else:src = cv.cvtColor(src, cv.COLOR_BGR2GRAY)frameH, frameW = frame.shape[:2]imgH, imgW = src.shape[:2]dst = np.zeros((frameH, frameW + imgW), np.uint8)dst[:, :frameW] = frame[:, :]dst[:, frameW:] = src[:, :]return dstclass MY_Picture(Node):def __init__(self, name):super().__init__(name)self.bridge = CvBridge()self.sub_img = self.create_subscription(CompressedImage, '/espRos/esp32camera', self.handleTopic, 1) #获取esp32传来的图像self.hand_detector = handDetector()self.volPer = self.value = self.index = 0self.effect = ["color", "thresh", "blur", "hue", "enhance"]self.volBar = 400self.last_stamp = Noneself.new_seconds = 0self.fps_seconds = 1def handleTopic(self, msg):self.last_stamp = msg.header.stamp if self.last_stamp:total_secs = Time(nanoseconds=self.last_stamp.nanosec, seconds=self.last_stamp.sec).nanosecondsdelta = datetime.timedelta(seconds=total_secs * 1e-9)seconds = delta.total_seconds()*100if self.new_seconds != 0:self.fps_seconds = seconds - self.new_secondsself.new_seconds = seconds#保留这次的值start = time.time()frame = self.bridge.compressed_imgmsg_to_cv2(msg)frame = cv.resize(frame, (640, 480))action = cv.waitKey(1) & 0xFFimg = self.hand_detector.findHands(frame)lmList = self.hand_detector.findPosition(frame, draw=False)if len(lmList) != 0:angle = self.hand_detector.calc_angle(4, 0, 8)#计算拇指,0点,食指尖的角度x1, y1 = lmList[4][1], lmList[4][2]x2, y2 = lmList[8][1], lmList[8][2]cx, cy = (x1 + x2) // 2, (y1 + y2) // 2cv.circle(img, (x1, y1), 15, (255, 0, 255), cv.FILLED)cv.circle(img, (x2, y2), 15, (255, 0, 255), cv.FILLED)cv.line(img, (x1, y1), (x2, y2), (255, 0, 255), 3)cv.circle(img, (cx, cy), 15, (255, 0, 255), cv.FILLED)if angle <= 10: cv.circle(img, (cx, cy), 15, (0, 255, 0), cv.FILLED)self.volBar = np.interp(angle, [0, 70], [400, 150])self.volPer = np.interp(angle, [0, 70], [0, 100])self.value = np.interp(angle, [0, 70], [0, 255])# print("angle: {},self.value: {}".format(angle, self.value))print(f'mode:{self.effect[self.index]}')# 进行阈值二值化操作,大于阈值value的,使用255表示,小于阈值value的,使用0表示if self.effect[self.index]=="thresh":gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY)frame = cv.threshold(gray, self.value, 255, cv.THRESH_BINARY)[1]# 进行高斯滤波,(21, 21)表示高斯矩阵的长与宽都是21,标准差取valueelif self.effect[self.index]=="blur":frame = cv.GaussianBlur(frame, (21, 21), np.interp(self.value, [0, 255], [0, 11]))# 色彩空间的转化,HSV转换为BGRelif self.effect[self.index]=="hue":frame = cv.cvtColor(frame, cv.COLOR_BGR2HSV)frame[:, :, 0] += int(self.value)frame = cv.cvtColor(frame, cv.COLOR_HSV2BGR)# 调节对比度elif self.effect[self.index]=="enhance":enh_val = self.value / 40clahe = cv.createCLAHE(clipLimit=enh_val, tileGridSize=(8, 8))lab = cv.cvtColor(frame, cv.COLOR_BGR2LAB)lab[:, :, 0] = clahe.apply(lab[:, :, 0])frame = cv.cvtColor(lab, cv.COLOR_LAB2BGR)if action == ord('f'):self.index += 1if self.index >= len(self.effect): self.index = 0end = time.time()fps = 1 / ((end - start)+self.fps_seconds)text = "FPS : " + str(int(fps))cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1)cv.rectangle(img, (50, 150), (85, 400), (255, 0, 0), 3)cv.rectangle(img, (50, int(self.volBar)), (85, 400), (0, 255, 0), cv.FILLED)cv.putText(img, f'{int(self.volPer)}%', (40, 450), cv.FONT_HERSHEY_COMPLEX, 1, (0, 255, 0), 3)dst = self.hand_detector.frame_combine(frame, img)cv.imshow('dst', dst)def main():print("start it")rclpy.init()esp_img = MY_Picture("My_Picture")try:rclpy.spin(esp_img)except KeyboardInterrupt:passfinally:esp_img.destroy_node()rclpy.shutdown()
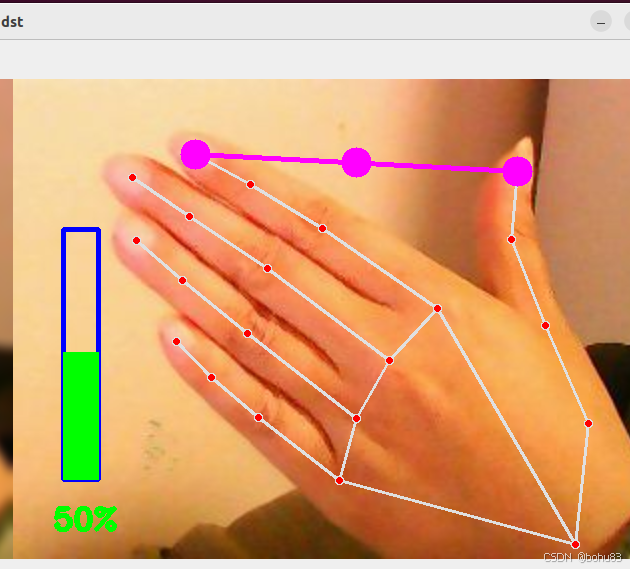
订阅esp32传出来的图像后,通过MediaPipe去做相关的识别后,再通过记录手指的点坐标,计算角4-0-8之间度数。本节与之前不同,增加了opencv输出的格式,"color", "thresh", "blur", "hue", "enhance"。默认是color,还有阈值化输出,高斯模糊等其他效果。按F键切换
构建后运行:
ros2 run yahboom_esp32_mediapipe HandCtrl
效果如下:

手势识别
src/yahboom_esp32_mediapipe/yahboom_esp32_mediapipe/目录下新建文件11_GestureRecognition.py,代码如下
#!/usr/bin/env python3
# encoding: utf-8
import math
import time
import cv2 as cv
import numpy as np
import mediapipe as mp
import rclpy
from rclpy.node import Node
from cv_bridge import CvBridge
from sensor_msgs.msg import Image, CompressedImagefrom rclpy.time import Time
import datetimeclass handDetector:def __init__(self, mode=False, maxHands=2, detectorCon=0.5, trackCon=0.5):self.tipIds = [4, 8, 12, 16, 20]self.mpHand = mp.solutions.handsself.mpDraw = mp.solutions.drawing_utilsself.hands = self.mpHand.Hands(static_image_mode=mode,max_num_hands=maxHands,min_detection_confidence=detectorCon,min_tracking_confidence=trackCon)self.lmList = []self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=6)self.drawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 255, 0), thickness=2, circle_radius=2)def get_dist(self, point1, point2):x1, y1 = point1x2, y2 = point2return abs(math.sqrt(math.pow(abs(y1 - y2), 2) + math.pow(abs(x1 - x2), 2)))def calc_angle(self, pt1, pt2, pt3):point1 = self.lmList[pt1][1], self.lmList[pt1][2]point2 = self.lmList[pt2][1], self.lmList[pt2][2]point3 = self.lmList[pt3][1], self.lmList[pt3][2]a = self.get_dist(point1, point2)b = self.get_dist(point2, point3)c = self.get_dist(point1, point3)try:radian = math.acos((math.pow(a, 2) + math.pow(b, 2) - math.pow(c, 2)) / (2 * a * b))angle = radian / math.pi * 180except:angle = 0return abs(angle)def findHands(self, frame, draw=True):self.lmList = []img = np.zeros(frame.shape, np.uint8)img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB)self.results = self.hands.process(img_RGB)if self.results.multi_hand_landmarks:for i in range(len(self.results.multi_hand_landmarks)):if draw: self.mpDraw.draw_landmarks(frame, self.results.multi_hand_landmarks[i], self.mpHand.HAND_CONNECTIONS, self.lmDrawSpec, self.drawSpec)self.mpDraw.draw_landmarks(img, self.results.multi_hand_landmarks[i], self.mpHand.HAND_CONNECTIONS, self.lmDrawSpec, self.drawSpec)for id, lm in enumerate(self.results.multi_hand_landmarks[i].landmark):h, w, c = frame.shapecx, cy = int(lm.x * w), int(lm.y * h)self.lmList.append([id, cx, cy])return frame, imgdef frame_combine(slef,frame, src):if len(frame.shape) == 3:frameH, frameW = frame.shape[:2]srcH, srcW = src.shape[:2]dst = np.zeros((max(frameH, srcH), frameW + srcW, 3), np.uint8)dst[:, :frameW] = frame[:, :]dst[:, frameW:] = src[:, :]else:src = cv.cvtColor(src, cv.COLOR_BGR2GRAY)frameH, frameW = frame.shape[:2]imgH, imgW = src.shape[:2]dst = np.zeros((frameH, frameW + imgW), np.uint8)dst[:, :frameW] = frame[:, :]dst[:, frameW:] = src[:, :]return dstdef fingersUp(self):fingers=[]# Thumbif (self.calc_angle(self.tipIds[0],self.tipIds[0] - 1,self.tipIds[0] - 2) > 150.0) and (self.calc_angle(self.tipIds[0] - 1,self.tipIds[0] - 2,self.tipIds[0] - 3) > 150.0): fingers.append(1)else:fingers.append(0)# 4 fingerfor id in range(1, 5):if self.lmList[self.tipIds[id]][2] < self.lmList[self.tipIds[id] - 2][2]:fingers.append(1)else:fingers.append(0)return fingersdef get_gesture(self):gesture = ""fingers = self.fingersUp()if self.lmList[self.tipIds[0]][2] > self.lmList[self.tipIds[1]][2] and \self.lmList[self.tipIds[0]][2] > self.lmList[self.tipIds[2]][2] and \self.lmList[self.tipIds[0]][2] > self.lmList[self.tipIds[3]][2] and \self.lmList[self.tipIds[0]][2] > self.lmList[self.tipIds[4]][2] : gesture = "Thumb_down"elif self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[1]][2] and \self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[2]][2] and \self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[3]][2] and \self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[4]][2] and \self.calc_angle(self.tipIds[1] - 1, self.tipIds[1] - 2, self.tipIds[1] - 3) < 150.0 : gesture = "Thumb_up"if fingers.count(1) == 3 or fingers.count(1) == 4:if fingers[0] == 1 and (self.get_dist(self.lmList[4][1:], self.lmList[8][1:])<self.get_dist(self.lmList[4][1:], self.lmList[5][1:])): gesture = "OK"elif fingers[2] == fingers[3] == 0: gesture = "Rock"elif fingers.count(1) == 3: gesture = "Three"else: gesture = "Four"elif fingers.count(1) == 0: gesture = "Zero"elif fingers.count(1) == 1: gesture = "One"elif fingers.count(1) == 2:if fingers[0] == 1 and fingers[4] == 1: gesture = "Six"elif fingers[0] == 1 and self.calc_angle(4, 5, 8) > 90: gesture = "Eight"elif fingers[0] == fingers[1] == 1 and self.get_dist(self.lmList[4][1:], self.lmList[8][1:]) < 50: gesture = "Heart_single"else: gesture = "Two"elif fingers.count(1)==5:gesture = "Five"if self.get_dist(self.lmList[4][1:], self.lmList[8][1:]) < 60 and \self.get_dist(self.lmList[4][1:], self.lmList[12][1:]) < 60 and \self.get_dist(self.lmList[4][1:], self.lmList[16][1:]) < 60 and \self.get_dist(self.lmList[4][1:], self.lmList[20][1:]) < 60 : gesture = "Seven"if self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[1]][2] and \self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[2]][2] and \self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[3]][2] and \self.lmList[self.tipIds[0]][2] < self.lmList[self.tipIds[4]][2] and \self.calc_angle(self.tipIds[1] - 1, self.tipIds[1] - 2, self.tipIds[1] - 3) > 150.0 : gesture = "Eight"return gestureclass MY_Picture(Node):def __init__(self, name):super().__init__(name)self.bridge = CvBridge()self.sub_img = self.create_subscription(CompressedImage, '/espRos/esp32camera', self.handleTopic, 1) #获取esp32传来的图像self.hand_detector = handDetector(detectorCon=0.75)self.last_stamp = Noneself.new_seconds = 0self.fps_seconds = 1def handleTopic(self, msg):self.last_stamp = msg.header.stamp if self.last_stamp:total_secs = Time(nanoseconds=self.last_stamp.nanosec, seconds=self.last_stamp.sec).nanosecondsdelta = datetime.timedelta(seconds=total_secs * 1e-9)seconds = delta.total_seconds()*100if self.new_seconds != 0:self.fps_seconds = seconds - self.new_secondsself.new_seconds = seconds#保留这次的值start = time.time()frame = self.bridge.compressed_imgmsg_to_cv2(msg)frame = cv.resize(frame, (640, 480))cv.waitKey(1) frame, img = self.hand_detector.findHands(frame, draw=False)if len(self.hand_detector.lmList) != 0:totalFingers = self.hand_detector.get_gesture()cv.rectangle(frame, (0, 430), (230, 480), (0, 255, 0), cv.FILLED)cv.putText(frame, str(totalFingers), (10, 470), cv.FONT_HERSHEY_PLAIN, 2, (255, 0, 0), 2)end = time.time()fps = 1 / ((end - start)+self.fps_seconds)text = "FPS : " + str(int(fps))cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1)dist = self.hand_detector.frame_combine(frame, img)cv.imshow('dist', dist)'''
Zero One Two Three Four Five Six Seven Eight
Ok: OK
Rock: rock
Thumb_up : 点赞
Thumb_down: 拇指向下
Heart_single: 单手比心
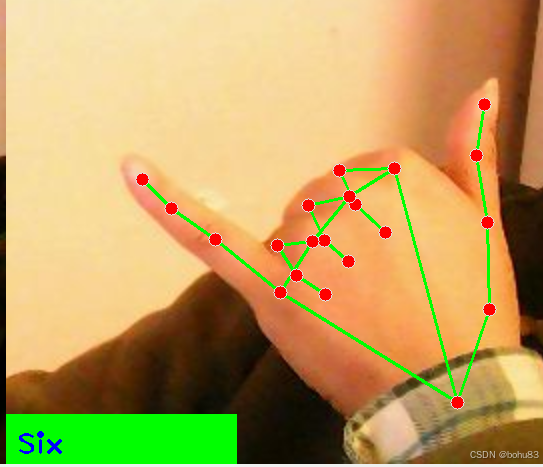
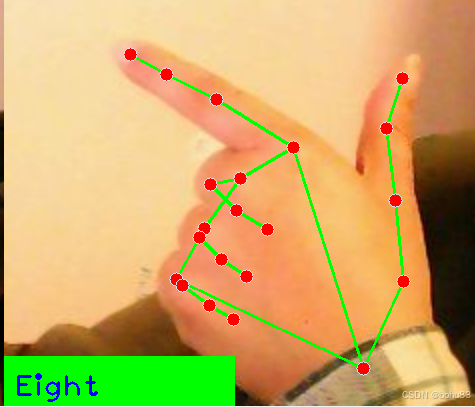
'''def main():print("start it")rclpy.init()esp_img = MY_Picture("My_Picture")try:rclpy.spin(esp_img)except KeyboardInterrupt:passfinally:esp_img.destroy_node()rclpy.shutdown()网上有不少这个例子,差异点可能在手势识别哪里,前面的hand模型都是一样的。
根据你预计的指点判断角度或者漏出的手指组合判断含义。有的也不太准确,大部分能识别。
构建后运行:ros2 run yahboom_esp32_mediapipe GestureRecognition
相关文章:
亚博microros小车-原生ubuntu支持系列:11手指控制与手势识别
识别框架还是沿用之前的了MediaPipe Hand。 背景知识不摘重复,参见之前的:亚博microros小车-原生ubuntu支持系列:10-画笔-CSDN博客 手指控制 src/yahboom_esp32_mediapipe/yahboom_esp32_mediapipe/目录下新建文件10_HandCtrl.pyÿ…...

JAVA-快速排序
目录 一、快速排序基本思想 二、快速排序的实现 1.Hoare法找基准值 2.挖坑法 3.前后指针法(了解) 三、快速排序的优化 1.三数取中法 2.递归到小的子区间时,可以考虑使用插入排序 四、非递归的写法 五、时间空间复杂度 一、快速排序基本思想 快速排序是 H…...

日志收集Day003
1.索引模板 查看所有索引模板 GET 10.0.0.101:9200/_template 2.查看单个索引模板 GET 10.0.0.101:9200/_template/.monitoring-es 3.创建索引模板 POST 10.0.0.101:9200/_template/lxctp {"aliases": {"DBA": {},"SRE": {},"K8S&qu…...

基于quartz,刷新定时器的cron表达式
文章目录 前言基于quartz,刷新定时器的cron表达式1. 先看一下测试效果2. 实现代码 前言 如果您觉得有用的话,记得给博主点个赞,评论,收藏一键三连啊,写作不易啊^ _ ^。 而且听说点赞的人每天的运气都不会太差&…...

数学大模型MAmmoTH:通过混合说明调整建立数学通才模型
向悦和陈文虎是该项目的主要作者。他们这个项目推出 MAmmoTH,这是一系列专为解决一般数学问题而定制的开源大型语言模型 (LLM)。 MAmmoTH 模型在 MathInstruct 上进行训练,MathInstruct 是我们精心策划的指令调整数据集。 MathInstruct 已编译 来自 13 个…...

Opencv学习
Long time no see!哈哈,假期终于有时间做一点自己喜欢的东西了 还是想说,每天花一点时间投在自己喜欢的事情上,或者专攻一些平时不学的方向,真的很酷! 图片绘制 对于图像绘制,可以分为:图像创…...
python生成图片和pdf,快速
1、下载安装 pip install imgkit pip install pdfkit2、wkhtmltopdf工具包,下载安装 下载地址:https://wkhtmltopdf.org/downloads.html 3、生成图片 import imgkit path_wkimg rD:\app\wkhtmltopdf\bin\wkhtmltoimage.exe # 工具路径,安…...

剑指Offer|LCR 044.在每个树行中找最大值
LCR 044.在每个树行中找最大值 给定一棵二叉树的根节点 root ,请找出该二叉树中每一层的最大值。 示例 1: 输入: root [1,3,2,5,3,null,9] 输出: [1,3,9] 解释:1/ \3 2/ \ \ 5 3 9 示例 2: 输入: root [1,2,3] 输出: [1,3] 解…...
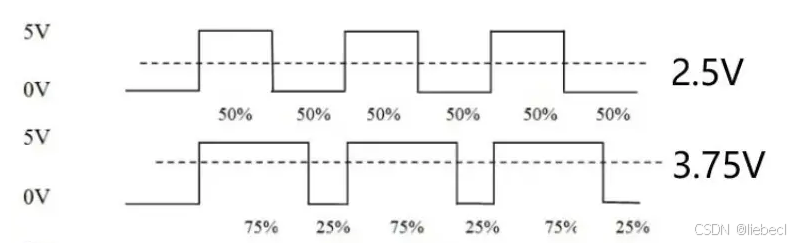
PWM信号概述
什么是PWM信号? PWM(Pulse-width modulation)是脉冲宽度调制的缩写。 脉冲宽度调制是一种模拟信号电平数字编码方法。 脉冲宽度调制PWM是通过将有效的电信号分散成离散形式从而来降低电信号所传递的平均功率的一种方式。所以根据面积等效法…...
的解释)
关于BAR(PCIE BAR或AXI BAR)的解释
假设某BAR的默认值是xxxx_0000(这里表示8个比特位),其中低4位不可写,可操作的最低位是4,所以该BAR的大小是2^416字节; 1、系统软件向BAR写0xFF 2、系统软件读BAR,读到的值是0xF0,于是…...

计算机的错误计算(二百二十一)
摘要 利用一个数学解题器化简计算 实验表明,即使是数学解题器,也是一派胡言。 有一读者来信,询问数学大模型的推理事宜。现就前面的案例继续做一讨论。 例1. 化简计算摘要中算式。 下面是与一个数学解题器的对话。 点评: &am…...

【力扣Hot 100】矩阵1
矩阵置零:1. 开两个数组判断该行/该列是否有0;2. 用第0行/第0列分别判断该列/该行是否有0 螺旋矩阵:记录方向,一直按某方向前进,遇到障碍方向就变一下 1. 矩阵置零 给定一个 *m* x *n* 的矩阵,如果一个元…...

移动端VR处理器和传统显卡的不同
骁龙 XR 系列芯片 更多地依赖 AI 技术 来优化渲染过程,而传统的 GPU 渲染 则倾向于在低画质下运行以减少负载。这种设计是为了在有限的硬件资源下(如移动端 XR 设备)实现高性能和低功耗的平衡。以下是具体的分析: 1. AI 驱动的渲染…...

「 机器人 」利用数据驱动模型替代仿真器:加速策略训练并降低硬件依赖
前言 在强化学习(Reinforcement Learning, RL)中,策略训练需要大量的交互数据(状态、动作、奖励、下一状态),而这些数据通常来自仿真器或真实硬件。传统高保真仿真器虽然能在一定程度上模拟飞行器的动力学,但往往计算量大、开发成本高,且仍可能与真实环境存在差距。为此…...

MATLAB 如何避免复杂shp文件对inpolygon的影响
**任务描述:**当我想用inpolygon函数将属于非洲的pixel选出来时,发现因为周边小岛的影响,pixel选取有问题,如下图。 第一种解决办法: 首先将复杂shp文件查分成简单的shp文件,即将不相交的元素分离开 [QGIS…...

【2024年华为OD机试】 (C卷,200分)- 贪吃的猴子(JavaScriptJava PythonC/C++)
一、问题描述 题目解析 问题描述 一只猴子来到果园,发现许多串香蕉排成一行,每串香蕉上有若干根香蕉。每串香蕉的根数由数组 numbers 给出。猴子每次只能从行的开头或末尾获取香蕉,并且只能获取 N 次。求猴子最多能获取多少根香蕉。 输入…...

PostgreSQL中级专家是什么意思?
数据库技术领域,PostgreSQL 作为一种广泛使用的开源关系型数据库管理系统,吸引了众多技术人员深入学习和研究。“PostgreSQL 中级专家” 是对掌握该数据库特定技能层次的一种描述。 知识储备 中级专家深入理解 PostgreSQL 的体系结构,包括进程…...

从根源分析,调试,定位和解决MacOS ld: unsupported tapi file type ‘!tapi-tbd‘ in YAML file
你要是遇到同样错误,找一圈都没有解决,建议认真读一下本文,这个应该是最终极的解决办法,从原理上剖析了产生的原因,同时给出来了调试和定位的办法。 maccos使用brew安装了一个gcc14, 结果编译一个最简单的程序都报错&a…...

【Uniapp-Vue3】previewImage图片预览
如果我们想要实现点击一张图片放大,并能够左右滑动,就要使用previewImage这个API。 uni.previewImage({ current:xxx, // 当前图片下标 urls:xxx, // 图片路径组 // 其他参数 }) 我们先编写一个点击图片的事件,并传递当前点击图片的下标&…...

doris:Insert Into Values
INSERT INTO VALUES 语句支持将 SQL 中的值导入到 Doris 的表中。INSERT INTO VALUES 是一个同步导入方式,执行导入后返回导入结果。可以通过请求的返回判断导入是否成功。INSERT INTO VALUES 可以保证导入任务的原子性,要么全部导入成功,要么…...

基于双T振荡器的正弦波LED调光电路设计与实践
1. 项目概述:用双T振荡器实现正弦波LED调光最近在捣鼓一些氛围灯项目,总感觉用单片机PWM做的呼吸灯效果有点“硬”,那种线性的明暗变化看久了难免审美疲劳。于是翻出以前模拟电路的老本行,琢磨着能不能用纯硬件的方式,…...

PvZ Toolkit终极指南:三步掌握植物大战僵尸最强修改器
PvZ Toolkit终极指南:三步掌握植物大战僵尸最强修改器 【免费下载链接】pvztoolkit 植物大战僵尸 PC 版综合修改器 项目地址: https://gitcode.com/gh_mirrors/pv/pvztoolkit PvZ Toolkit是一款专为植物大战僵尸PC版设计的综合修改器工具,能够让你…...

Windows安卓应用安装终极指南:5分钟快速配置跨平台应用体验
Windows安卓应用安装终极指南:5分钟快速配置跨平台应用体验 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 还在为在Windows电脑上无法直接安装安卓应用而烦…...
运营管理与服务保障平台建设方案)
低空旅游观光与低空通勤(eVTOL)运营管理与服务保障平台建设方案
本方案旨在为eVTOL载具构建集运营管理、空中交通管制、安全保障与乘客服务于一体的数字化平台。通过微服务架构、5G-A融合感知、空域网格化与零信任安全等核心技术,解决高密度飞行中的资源调度与安全冲突问题。目标实现毫秒级冲突解算与15分钟内快速周转,…...

动物森友会岛屿设计终极指南:用Happy Island Designer打造梦想岛屿
动物森友会岛屿设计终极指南:用Happy Island Designer打造梦想岛屿 【免费下载链接】HappyIslandDesigner "Happy Island Designer (Alpha)",是一个在线工具,它允许用户设计和定制自己的岛屿。这个工具是受游戏《动物森友会》(Anim…...

机器学习势函数在高温超导材料缺陷与相变研究中的应用
1. 项目概述:当机器学习“遇见”高温超导的微观世界高温超导体,尤其是像YBa2Cu3O7(YBCO)这样的铜氧化物,一直是凝聚态物理和材料科学领域的“明星”材料。它们能在相对较高的温度下实现零电阻,为能源传输、…...
虚拟显示器优化指南)
拒绝延迟与黑屏:向日葵控制端 局域网直连 P2P 穿透与无头服务器(Headless)虚拟显示器优化指南
拒绝延迟与黑屏:向日葵控制端 局域网直连 P2P 穿透与无头服务器(Headless)虚拟显示器优化指南 在远程开发、分布式部署及日常运维场景中,我们经常需要远程连接到公司的高配工作站、机房服务器或家中的调试开发机。 作为国内普及…...

拒绝繁琐 PS:美图秀秀 电脑版在技术博客配图、无畸变裁剪与尺寸标准化中的应用
在日常开发、技术写作或维护 GitHub 开源项目时,技术配图和录屏展示是不可或缺的组成部分。 然而,对于大多数程序员和前端开发者来说,仅仅为了裁剪一个 App Icon 尺寸、给一系列产品图加防伪水印、对系统敏感配置截图进行脱敏打码࿰…...

SuperCom串口调试工具终极指南:快速解决嵌入式开发中的通信难题
SuperCom串口调试工具终极指南:快速解决嵌入式开发中的通信难题 【免费下载链接】SuperCom SuperCom 是一款串口调试工具 项目地址: https://gitcode.com/gh_mirrors/su/SuperCom 想象一下这样的场景:你正在调试一个嵌入式设备,需要同…...

League Akari:英雄联盟客户端智能自动化工具包实战指南
League Akari:英雄联盟客户端智能自动化工具包实战指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit League Akari是一款基于英雄…...