如何优化垃圾回收机制?
垃圾回收机制
回收发生在哪里?
.对象在什么时候可以被回收?

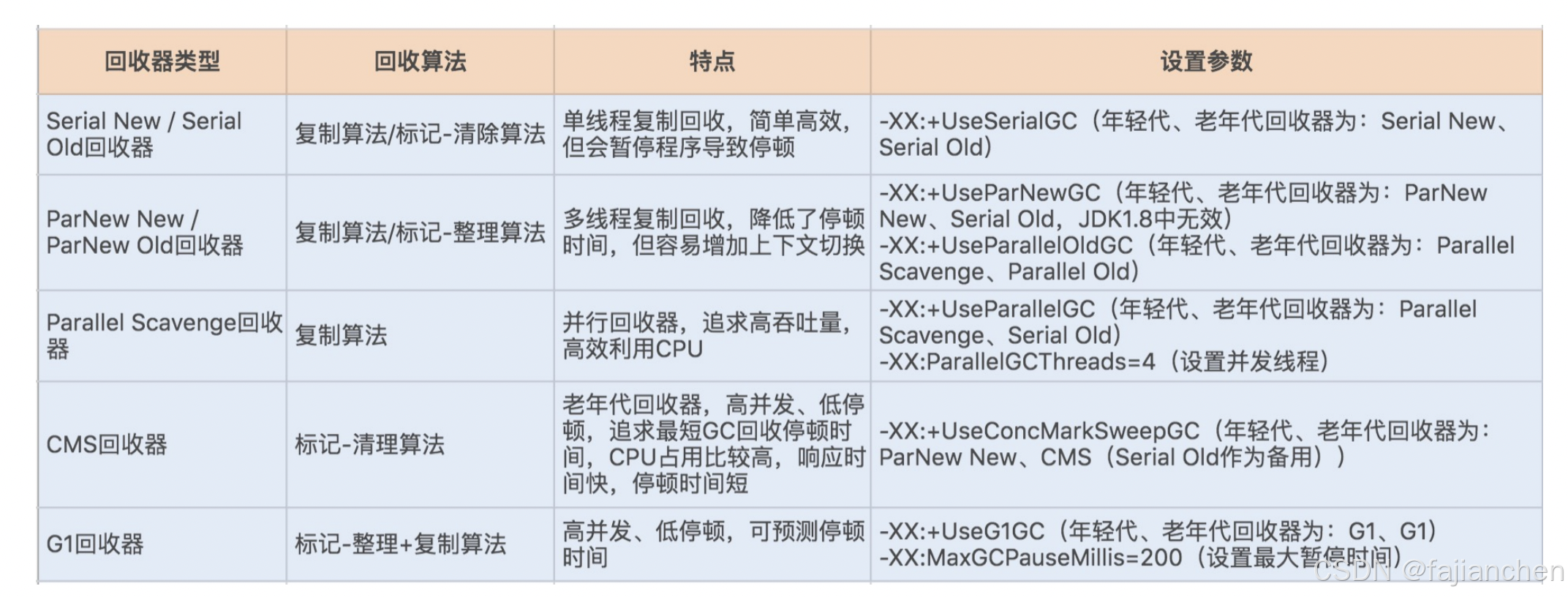
GC 算法

查看 & 分析 GC 日志
1 -XX:+PrintGC 输出 GC 日志
2 -XX:+PrintGCDetails 输出 GC 的详细日志
3 -XX:+PrintGCTimeStamps 输出 GC 的时间戳(以基准时间的形式)
4 -XX:+PrintGCDateStamps 输出 GC 的时间戳(以日期的形式,如 2013-05-04T21:53:59.234+0800)
5 -XX:+PrintHeapAtGC 在进行 GC 的前后打印出堆的信息
6 -Xloggc:../logs/gc.log 日志文件的输出路径笔者推荐文章
- 敏捷架构的 TOGAF 层次化迭代建模
- 架构规划之如何划分任务边界?
- 资源下载 技术架构,业务架构,数据架构,企业架构,行业技术方案 TOGAF | 跟着Byte学架构
- 定制化企业架构元模型-CSDN博客
- G1相对于CMS的的优势-CSDN博客
相关文章:
如何优化垃圾回收机制?
垃圾回收机制 掌握 GC 算法之前,我们需要先弄清楚 3 个问题。第一,回收发生在哪里?第二,对象在 什么时候可以被回收?第三,如何回收这些对象? 回收发生在哪里? JVM 的内存区域中&…...

beyond the ‘PHYSICAL‘ memory limit.问题处理
Container [pid5616,containerIDcontainer_e50_1734408743176_3027740_01_000006] is running 507887616B beyond the ‘PHYSICAL’ memory limit. Current usage: 4.5 GB of 4 GB physical memory used; 6.6 GB of 8.4 GB virtual memory used. Killing container. 1.增大map…...

Day36【AI思考】-表达式知识体系总览
文章目录 **表达式知识体系总览**回答1:**表达式知识体系****一、三种表达式形式对比****二、表达式转换核心方法****1. 中缀转后缀(重点)****2. 中缀转前缀** **三、表达式计算方法****1. 后缀表达式计算(栈实现)****…...
调试)
段错误(Segmentation Fault)调试
1. 使用 GDB(GNU Debugger) GDB 是一个强大的调试工具,可以帮助你逐步执行程序并检查变量状态。 编译时添加调试信息: gcc -g your_program.c -o your_program启动 GDB: gdb ./your_program运行程序: …...
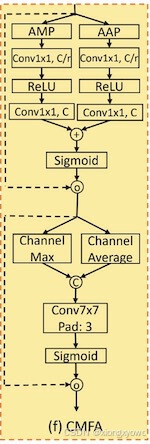
每日Attention学习19——Convolutional Multi-Focal Attention
每日Attention学习19——Convolutional Multi-Focal Attention 模块出处 [ICLR 25 Submission] [link] UltraLightUNet: Rethinking U-shaped Network with Multi-kernel Lightweight Convolutions for Medical Image Segmentation 模块名称 Convolutional Multi-Focal Atte…...

LeetCode题练习与总结:三个数的最大乘积--628
一、题目描述 给你一个整型数组 nums ,在数组中找出由三个数组成的最大乘积,并输出这个乘积。 示例 1: 输入:nums [1,2,3] 输出:6示例 2: 输入:nums [1,2,3,4] 输出:24示例 3&a…...
Colorful/七彩虹 隐星P15 TA 24 原厂Win11 家庭版系统 带F9 Colorful一键恢复功能
Colorful/七彩虹 隐星P15 TA 24 原厂Win11 家庭中文版系统 带F9 Colorful一键恢复功能 自动重建COLORFUL RECOVERY功能 带所有随机软件和机型专用驱动 支持机型:隐星P15 TA 24 文件下载:asusoem.cn/745.html 文件格式:ISO 系统版本&…...

第二篇:多模态技术突破——DeepSeek如何重构AI的感知与认知边界
——从跨模态对齐到因果推理的工程化实践 在AI技术从单一模态向多模态跃迁的关键阶段,DeepSeek通过自研的多模态融合框架,在视觉-语言-语音的联合理解与生成领域实现系统性突破。本文将从技术实现层面,解构其跨模态表征学习、动态融合机制与…...

CTreeCtrl 设置图标
mfc界面修改真难受 使用CTreeCtrl 进行设置导航视图时,有时候需要设置图标,一般使用如下代码 m_TreeViewImages.DeleteImageList();UINT uiBmpId IDB_ICONLIST_TREE;CBitmap bmp; if (!bmp.LoadBitmap(uiBmpId)) return;BITMAP bmpObj; bmp.GetBitmap…...

在JAX-RS中获取请求头信息的方法
在JAX-RS中获取请求头信息的方法 HeaderParam注解,可以直接将请求头中的特定值注入到方法参数中,代码示例: import javax.ws.rs.GET; import javax.ws.rs.HeaderParam; import javax.ws.rs.Path; import javax.ws.rs.core.Response;Path(&q…...

Java 面试之结束问答
技术优化 线程池优化 设置最大线程数设置最小核心线程数设置额外线程存活时间选择线程池队列选择合适的线程池选择合适的饱和策略 锁优化 尽量不要锁住方法缩小同步代码块,只锁数据锁中尽量不要再包含锁将锁私有化,在内部管理锁进行适当的锁分解 HT…...
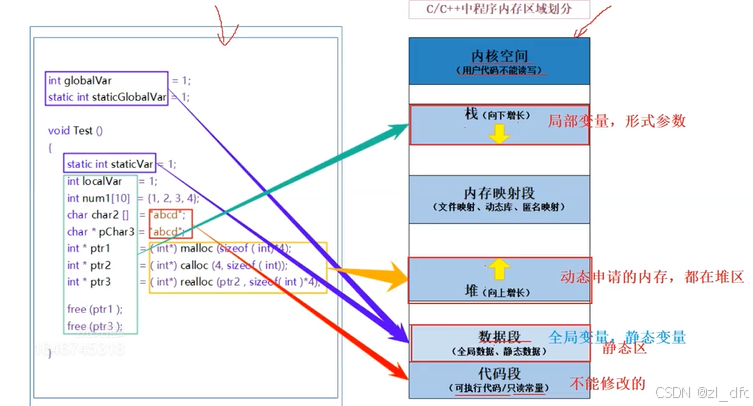
柔性数组与c/c++程序中内存区域的划分
1.柔性数组 1.1柔性数组的定义 柔性数组是指在结构体中定义的,其大小在编译时未确定,而在运行时动态分配的数组。这种数组允许结构体的大小根据需要动态变化。语法如下: struct D {int a;int arry1[0]; };struct F {int a;int arry2[]; };…...

mini-lsm通关笔记Week2Day7
项目地址:https://github.com/skyzh/mini-lsm 个人实现地址:https://gitee.com/cnyuyang/mini-lsm 在上一章中,您已经构建了一个完整的基于LSM的存储引擎。在本周末,我们将实现存储引擎的一些简单但重要的优化。欢迎来到Mini-LSM的…...
Typora免费使用
一.下载地址 https://typoraio.cn/ 二.修改配置文件 1.找到安装路径下的LicenseIndex.180dd4c7.4da8909c.chunk.js文件 文件路径为:安装路径\resources\page-dist\static\js\LicenseIndex.180dd4c7.4da8909c.chunk.js 将js中的 e.hasActivated"true"e.hasActiva…...
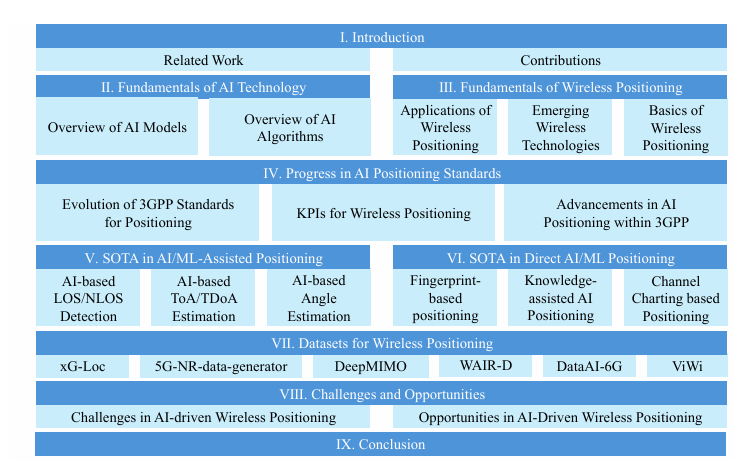
AI驱动的无线定位:基础、标准、最新进展与挑战
1. 论文概述 研究目标:本论文旨在综述AI在无线定位领域的应用,包括其基础理论、标准化进展、最新技术发展,以及面临的挑战和未来研究方向。主要发现: AI/ML 技术已成为提升无线定位精度和鲁棒性的关键手段,特别是在 3GPP 标准的推动下。论文系统性地分析了 AI 在 LOS/NLOS…...

苹果再度砍掉AR眼镜项目?AR真的是伪风口吗?
曾经,AR游戏一度异常火热,宝可梦go让多少人不惜翻墙都要去玩,但是也没过去几年,苹果被曝出再度砍掉了AR眼镜项目,面对着市场的变化,让人不禁想问AR真的是伪风口吗? 一、苹果再度砍掉AR眼镜项目&…...
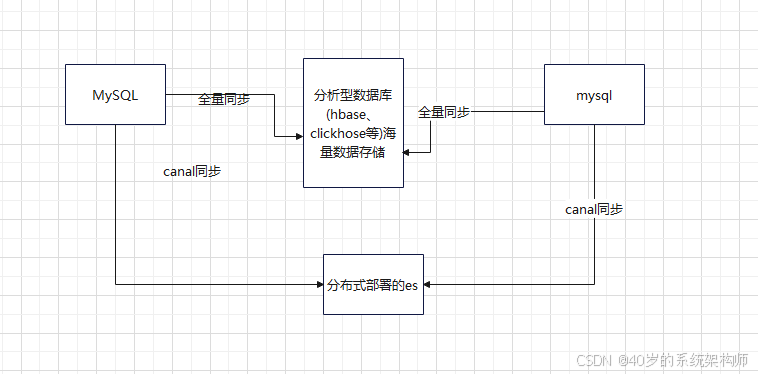
18 大量数据的异步查询方案
在分布式的应用中分库分表大家都已经熟知了。如果我们的程序中需要做一个模糊查询,那就涉及到跨库搜索的情况,这个时候需要看中间件能不能支持跨库求交集的功能。比如mycat就不支持跨库查询,当然现在mycat也渐渐被摒弃了(没有处理笛卡尔交集的…...
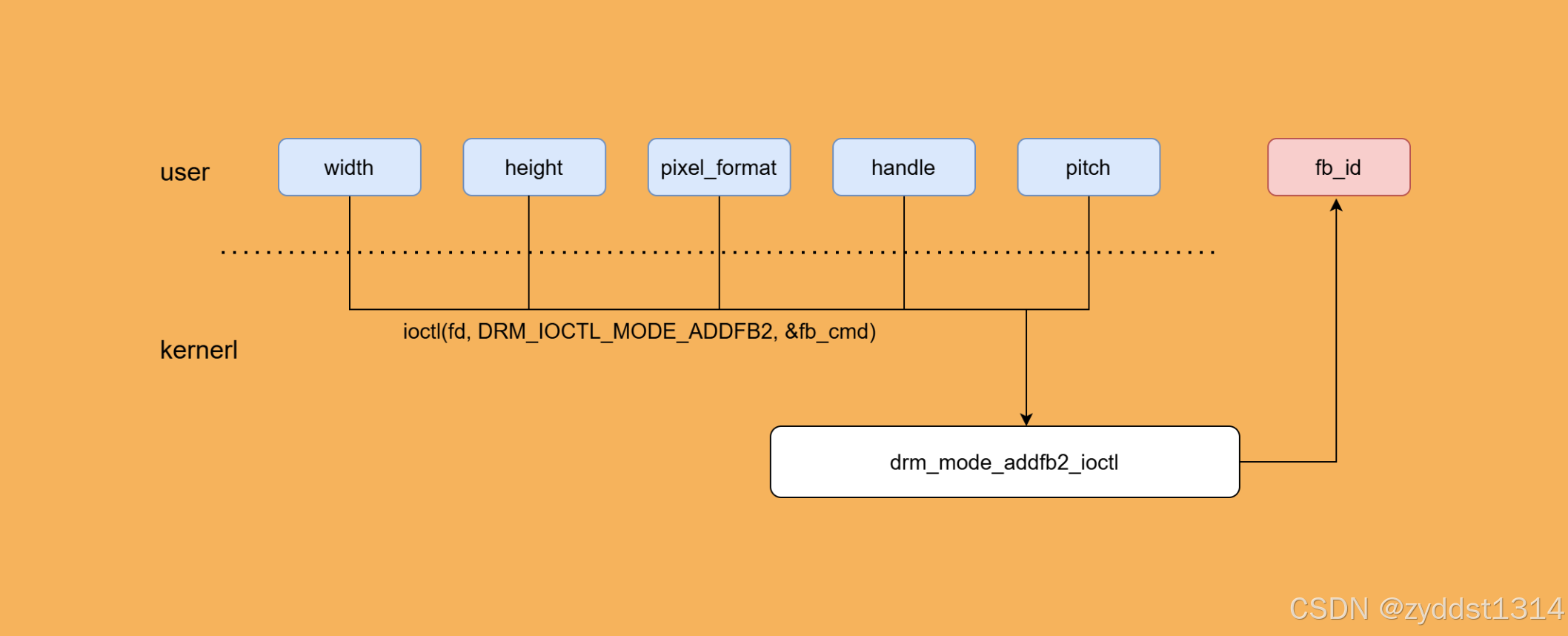
DRM系列八:Drm之DRM_IOCTL_MODE_ADDFB2
本系列文章基于linux 5.15 在上一篇文章DRM系列七:Drm之DRM_IOCTL_MODE_CREATE_DUMB获取buf的handle和pitch之后,接着使用ioctl(fd, DRM_IOCTL_MODE_ADDFB2, &fb_cmd)创建一个新的帧缓冲区对象(framebuffer object),并将帧缓冲区对象与显…...
软件测试用例篇
设计测试用例是测试面试的必考题,务必好好学 1. 测试用例 测试用例的概念 测试⽤例(Test Case)是为了实施测试而向被测试的系统提供的⼀组集合,这组集合包含:测试环境、操作步骤、测试数据、预期结果等要素。 设计测试⽤…...

PopupMenuButton组件的功能和用法
文章目录 1 概念介绍2 使用方法3 示例代码 我们在上一章回中介绍了Sliver综合示例相关的内容,本章回中将介绍PopupMenuButton组件.闲话休提,让我们一起Talk Flutter吧。 1 概念介绍 我们在本章回中介绍的PopupMenuButton组件位于AppBar右侧,…...

DLSS Swapper终极指南:免费开源工具让游戏DLSS管理变得简单快速
DLSS Swapper终极指南:免费开源工具让游戏DLSS管理变得简单快速 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper 如果你正在寻找一款能够智能管理游戏DLSS、FSR和XeSS文件的免费开源工具,那么DLS…...

3分钟掌握Seraphine:英雄联盟智能助手完全指南
3分钟掌握Seraphine:英雄联盟智能助手完全指南 【免费下载链接】Seraphine 英雄联盟战绩查询工具 项目地址: https://gitcode.com/gh_mirrors/se/Seraphine Seraphine是一款基于英雄联盟官方LCU API开发的智能游戏助手,通过自动BP系统和实时战绩查…...

AI助手API开发资源全指南:从入门到实战的宝藏清单
1. 项目概述:一个为AI助手API开发者量身打造的“藏宝图”如果你正在或打算基于OpenAI的Assistant API、Anthropic的Claude API,或是其他主流AI平台的助手接口来构建应用,那么你大概率会遇到一个经典困境:官方文档虽然详尽…...

嵌入式测试学习第 12天:串口基础概念:UART、波特率、数据位、校验位
串口基础概念:UART、波特率、数据位、校验位一、串口整体基础概念1、什么是UART串口2、串口实物真实图片① 主板/开发板排针串口② USB转TTL串口模块③ 老式DB9工业串口公头母头二、串口四大核心参数1、波特率概念常用标准固定值通俗理解测试场景2、数据位概念作用3…...

认识Python数据包套接字
如你所知,数据包格式套接字(Datagram Sockets)也叫“无连接的套接字”,在代码中使用 SOCK_DGRAM 表示。可以将 SOCK_DGRAM 比喻成高速移动的摩托车快递,它有以下特征:强调快速传输而非传输顺序;…...

82.人工智能实战:大模型多环境治理怎么做?从开发、测试、预发到生产的 Prompt、模型、知识库隔离方案
人工智能实战:大模型多环境治理怎么做?从开发、测试、预发到生产的 Prompt、模型、知识库隔离方案 一、问题场景:测试环境改了 Prompt,结果生产回答变了 很多大模型项目早期只有一个环境: 一套 Prompt 一个知识库 一个模型地址 一个配置表开发、测试、运营都在同一套配置…...

基于CLUE与加速度计的鸡蛋坠落实验:从传感器数据到缓冲设计优化
1. 项目概述:用传感器数据为物理实验“上保险” 鸡蛋坠落实验,一个听起来就充满童年乐趣和“悲剧”风险的经典物理项目。它的核心挑战在于,如何设计一个缓冲装置,让一枚脆弱的生鸡蛋从高处坠落而不破裂。传统上,我们依…...

可逆计算与量子电路合成:改进QM算法与全局优化
1. 可逆计算与量子电路合成基础在量子计算领域,可逆计算是一项关键技术,它不仅是实现低功耗设计的核心方法,更是量子电路合成的基础。传统计算机中的逻辑门大多是不可逆的,这意味着计算过程中会丢失信息并产生热量。而量子计算由于…...

Linux光标主题管理工具x-cursor-help:从原理到实战
1. 项目概述:一个被低估的鼠标光标辅助工具如果你在Linux桌面环境下工作,尤其是使用像GNOME、KDE Plasma这类现代化的桌面环境,你可能会遇到一个不大不小但很恼人的问题:鼠标光标主题的安装和管理。从网上下载了一个漂亮的.tar.gz…...

ESP-SR深度解析:嵌入式语音识别系统的架构设计与性能优化实战指南
ESP-SR深度解析:嵌入式语音识别系统的架构设计与性能优化实战指南 【免费下载链接】esp-sr Speech recognition 项目地址: https://gitcode.com/gh_mirrors/es/esp-sr 在物联网设备智能化浪潮中,语音交互已成为人机交互的重要入口。ESP-SR作为乐鑫…...