视觉硬件选型和算法选择(CNN)
基础知识
-
什么是机械视觉:
机械视觉是一种利用机器代替人眼来进行测量和判断的技术,通过光学系统、图像传感器等设备获取图像,并运用图像处理和分析算法来提取信息,以实现对目标物体的识别、检测、测量和定位等功能。
-
机械视觉与人类视觉有什么区别?:
机械视觉具有更高的精度和稳定性,能够在恶劣环境下工作,并且可以进行高速、大量的数据处理。但相比之下,人类视觉在灵活性、对复杂场景的理解和感知能力等方面具有优势。
系统组成
-
机械视觉系统由哪些部分构成?
一般由照明系统、光学成像系统、图像传感器、图像处理单元、执行机构等组成。照明系统提供合适的光源,光学成像系统将目标物体成像在图像传感器上,图像传感器将光信号转换为电信号,图像处理单元对图像进行分析和处理,执行机构根据处理结果进行相应的动作。
-
不同类型的图像传感器(如 CCD 和 CMOS)有什么特点和区别?
CCD(电荷耦合器件)具有较高的灵敏度和图像质量,但成本较高,功耗较大;CMOS(互补金属氧化物半导体)成本较低、功耗小、集成度高,但在灵敏度和图像质量上相对略逊一筹。
应用场景
-
机械视觉在工业生产中有哪些具体应用?
如在汽车制造中的零部件检测、装配质量控制,电子制造中的芯片检测、电路板焊接检测,食品饮料行业的包装检测、异物检测等。
-
机械视觉在农业领域有哪些应用
例如农作物生长监测、病虫害检测、果实采摘、种子筛选等。
技术挑战
-
如何提高机械视觉系统的精度和稳定性?
这涉及到多个方面,如选择高精度的光学元件、优化照明方案、采用先进的图像处理算法、进行系统的校准和标定等。
-
在复杂环境下(如强光、弱光、噪声干扰等)如何保证机械视觉系统的性能?
需要采用特殊的照明技术、图像增强算法、滤波算法等来克服环境因素的影响,提高系统的抗干扰能力。
发展趋势
-
机械视觉技术未来的发展方向是什么
包括更高分辨率和帧率的图像传感器、更强大的深度学习算法、智能化的视觉系统、多模态融合的视觉技术等。
-
人工智能技术如何推动机械视觉的发展?
人工智能中的深度学习算法可以自动学习图像中的特征,实现更准确的目标识别和分类,提高机械视觉系统的智能化水平和性能。
视觉设备
常用的相机
海康威视 , 大华 ,巴斯勒 ,大华,华周,康耐视,映美镜,大恒,灰点
常用镜头
FA镜头 , 海康 , OPT , vs , Computar
远心镜头: 视清 , 灿锐
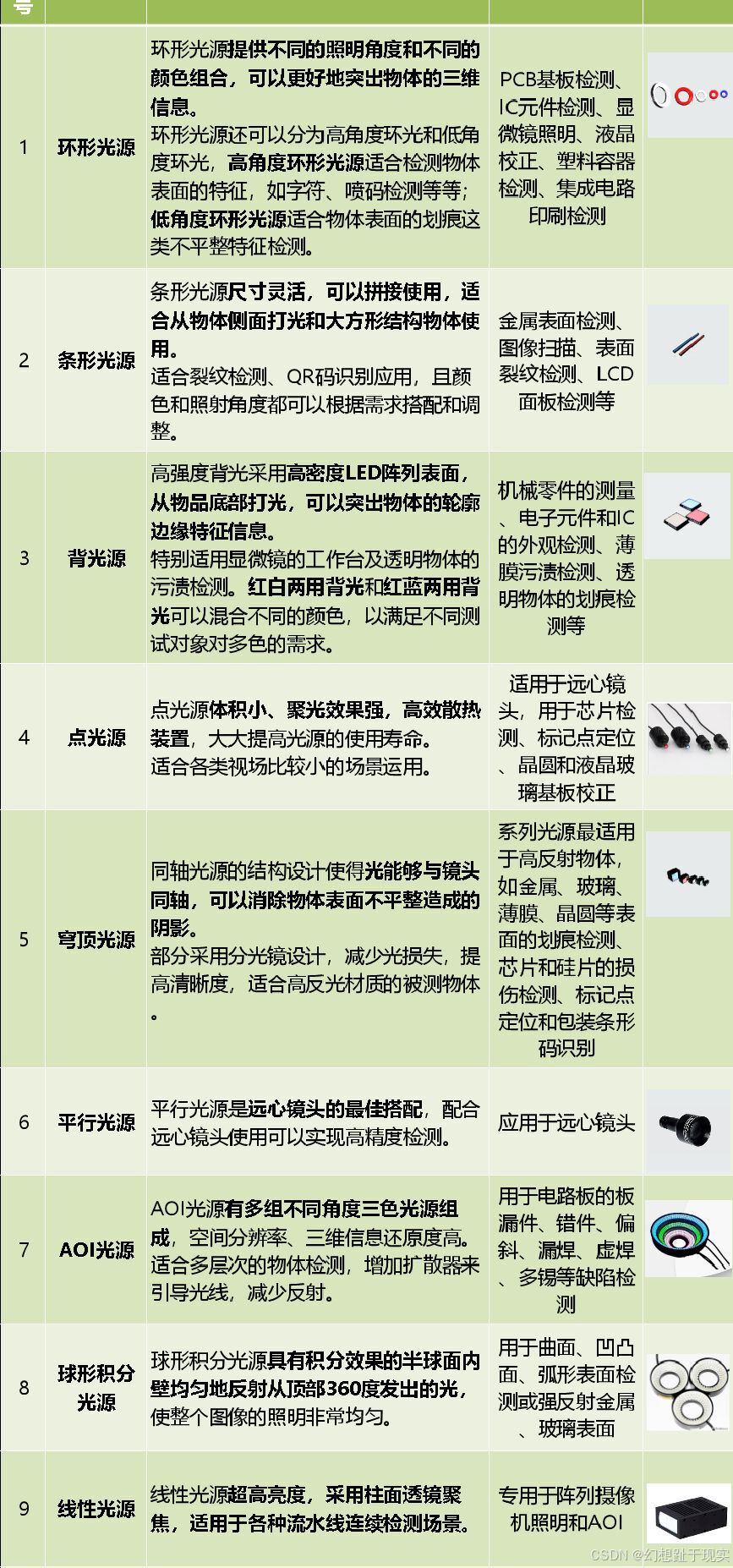
常用光源
OPT、嘉励
扫码枪
基恩士、得力捷、Cognex、
补充:如果我们在做扫码的项目,首先我们要考虑偏振光
偏振片 : 光线在非金属表面的反射是偏振光,借助于偏振片可以有效的消除物体的表面反光
机械视觉的概述
机械视觉的工作原理
相机采集图像,软件处理分析,最后的出结论
机械视觉的应用
引导.检测,识别,测量
影响曝光的因素
感光度,快门,光圈
视觉软件
Visionpro Visionmaster Halcon Opencv
FA镜头参数
-
光圈: 代表镜头的入光量 f/1.8 , f/2.8 , f/4 , f/8 , f/16 数值最小,光圈越大, 允许更多的光线通过
-
焦距: 从镜头的镜面光学中心到相机芯片的距离, 8mm 12mm 25mm 焦距越大,相同拍照距离下视野范围越小,畸变也越小
-
畸变: 因为镜头凸镜的原理, 在图像的中心和边缘的放大率不一致 ,导致排除的图片扭曲或者变形
-
靶面尺寸: 镜头靶面的尺寸要大于等于相机靶面尺寸, 否则会有暗角
计算公式
注意: 1英寸=16mm; 物距==工作距离 视野就可以说是物体长或宽(产品尺寸) 芯片尺寸=CCD靶面型号的尺寸
-
视觉精度 = 公差大小 / 10(5或3)
-
单边分辨率= 视野的大小 / 视觉精度(像素) / 2(亚像素)
-
选择像素 = 单分辨率(长) * 单分辨率(宽)
-
焦距 (f) = 工作距离 * 芯片尺寸 / 视野大小
-
芯片尺寸 = 像元尺寸(长或宽) * 单边分辨率(长或宽) /1000 (转mm)
-
工作距离(WD) = 焦距(f) * 芯片尺寸 / 视野大小
-
工作距离(WD) = 焦距(f) / 倍率
-
视野大小(FOV) = 工作距离(WD) * 芯片尺寸 / 焦距(f)
-
系统放大倍率 = 芯片短边 / 视野短边
海康机器人-机器视觉产品页
相机选型示例
| 检测一个25mm*15mm的零件,需要达到0.08mm的精度,动态检测,需要选用哪个像素相机比较合适. | 相机选型 |
|---|---|
| 视野: 35mm * 25mm 视觉精度 =0.08/3=0.026mm | 视野大小是25*15,所以我们要给大值 |
| 分辨率 = 35/0.026 =1346 25/0.026=961 | 这里是大约取值 |
| 所以我们要选,大于1346*961 的分辨率的相机 | 常见的全局相机(动态)有: CA013-A0GM(12801024) CS050-10GM(24482048) CH120-10GM(4096*3000) |
| 产品运动速度为200mm/s,视觉精度为0.015mm,视野大小 30mm*20mm, 6pc/s,相机该如何选择 |
|---|
| 相机分辨率=(30/0.015)*(20/0.015)=266.6万像素 |
| 每秒6pc产品 ,相机帧率要大于6帧 曝光时间 T < 0.015/200 =75us |
| 可以选择 320万(2048*1536)全局相机 |
镜头选型
| 相机MV-CS050-60GM 视野100X80mm 物距不低于200mm 如何选择镜头? |
|---|
| 视野= 100 80mm 工作距离=物距>=200mm 相机是500w(2448 2048)像素黑白相机 最大帧率是23fp/s 像元尺寸 3.45um * 3.45um |
| 芯片尺寸= 3.45*2448/1000=8.4mm(大约) 焦距(f)=220✖8.4/100=18.48mm |
| 所以我们要选择焦距大于 18.48mm的镜头 |
| 检测区域为110m*27mm 所需的细节尺寸为0.5mm 工作距离 400mm |
|---|
| 视野(FOV) : 150mm*60mm 像素精度=0.5/10=0.05mm/pixel |
| 分辨率= (150/0.05)*(60/0.05)=3000✖1200 要选择>360w像素相机 选用 MV-CS060-10GM-PRO 像元尺寸是2.4um 分辨率=3072✖2048 |
| 芯片尺寸=2.4*3072/1000=7.3mm 焦距(f)=400✖7.3/150=19mm 选择大于19mm的焦距镜头 |
| 已知条件: 工业相机芯片为2/3,c接口 ,5百万像素 视野是100*100mm 工作距离是500mm |
|---|
| 像元尺寸=3.45um 芯片尺寸=3.45*2500/1000=8.6mm |
| 焦距= 500mm*8.6mm/100=43mm |
| 镜头放大倍率= 8.6mm/100=0.086 |
项目前期准备
当我们收到客户需要我们去做视觉定位项目,以下是我们的要求
1.明确项目需求
- 定位类型: 首先我们要确定是二维定位(仅确定平面内的位置和角度) 还是三维定位(确定物体在空间中的位置和姿态).例如:在工业生产线上,通常只用二维定位来确定物料的放置位置; 而在机器人抓取不规则物体的时候,可能就需要三维定位
- 精度要求: 明确所需的定位精度, 如毫米 ,微米级等. 不同的应用场景对精度要求差异很大; 像苹果手机零件之类的,有些制造可能要求微米级的精度, 但是有的相对比较大的分拣,可能只需要毫米级精度
- 速度要求: 了解系统需要达到的处理速度, 例如每秒钟需要完成多少次定位. 高速生产线对视觉定位系统的处理速度要求较高
- 工作环境: 我们需要到现场去了解项目的应用场景,需要去考虑光照条件, 温度, 湿度, 噪音 等环境因素. 例如, 在户外强光环境下 , 需要选择抗干扰的相机和合适的光源; 在高温环境中确保硬件设备能正常工作; 在噪音大的车间, 确保相机配备坚固和光源是否被干扰;
2.选择硬件设备
-
相机: 根据项目需求来选择相机类型, 如: 普通工业相机 ,高速相机 ,3D相机等; 根据定位精度和速度要求来选择相机的分辨率和帧率. 对于微小的物体进行高精度定位, 需要采用高分辨率的工业相机;根据环境,我们需要考虑是否需要对相机采用一些保护措施;如:使用防护外壳, 安装减震装置或选择抗噪传感器; 若是获取物体深度信息以实现更精准定位, 3D相机可能更合适; 对于高速生产线, 帧率应该选择在50fps以上
-
镜头: 根据工作距离和视野范围选择合适的镜头. 不同的镜头有不同的焦距和视角 ,需要根据实际情况去选择. 例如: 在大视野检测中, 可选择广角镜头; 在近距离精度检测中, 可选择长焦镜头;
-
光源: 需要根据物体的材质和表面特性选择光源类型, 还要考虑现场的环境因素是否需要采用抗干扰光源. 如:环形光和偏振光 适用于表面有反光的物体 ,可以减少反光干扰, 背光源 适用于检测物体的轮廓. 特定荧光物质可选择紫外光源.
视觉系统开发
1.图像采集
- 手动采集: 使用视觉软件中的图像采集工具, 连接并配置好相机, 设置采集参数, 如曝光时间 , 增益等 以获取清晰的图像.
- 自动采集: 通过编写C#或 VB.NET代码实现自动采集功能
2.图像预处理
-
滤波处理: 运用高通滤波 ,高斯采样器等算法. 均值滤波可以平滑图像,减少噪声, 中值滤波对椒盐噪声有较好的去除效果, 高斯滤波能够有效抑制高斯噪音,平滑图像 (高通滤波包含 高斯滤波 均值滤波 中值滤波)
-
灰度化处理: 将彩色图像转换成灰度图像, 可简化图像处理过程
-
二值化处理: 使用阈值分割工具将灰度图像转换成二值图像. 可以选择固定阈值或自适应阈值方法
-
图像增强: 通过直方图均衡化, 对比度调整等方法增强图像的质量
3.特征提取
-
边缘检测: 根据物体的特点, 选择合适的算法. 例如, 使用边缘检测算法提取物体的边缘特征,选用 Sobel算子 ,Canny算子等. 设置合适的参数, 如边缘强度阈值, 以提取清晰的边缘特征. 使用自动边缘阈值 ,可以适当滤除一定的边缘干扰
-
形状特征提取: 对于圆形, 矩形等规则形状的物体, 使用形状匹配工具提取其特征参数, 对于纹理特征提取, 可采用灰度共生矩阵等方法, 分析图像中纹理的方向, 粗细等特征, 通过形态学调整对图像执行灰度形态, 增强或减少图像特征.
4.算法选择与应用
-
基于模板匹配
-
创建模板: 选择一副包含物体的图像, 手动或者自动选择目标区域, 创建模板
-
匹配设置: 设置匹配参数, 匹配类型(基于灰度或基于形状) , 匹配阈值, 目标物体的位置和角度
-
-
基于特征点匹配
-
特征提取: 使用如 SIFT(尺度不变特征变换) , SURF(加速稳健特征), ORB(加速的具有旋转不变性的BRIEF特征)等算法提取图像中的特征点
-
特征匹配: 将提取的特征点与预先存储的目标特征点进行匹配, 通过匹配的特征点计算物体的位置和姿态.
-
-
模式匹配算法
-
Patmax: 精确度最高
-
PatQuick: 算法速度最快
-
PatFlex: 比较适合于畸变的情况
-
-
基于深度学习的定位
模板选择: 选择合适的深度学习模型, 如基于卷积神经网络(CNN)的目标检测模型, 如 YOLO(You Only Look Once), Faster R-CNN等 ,或专门用于定位的网络结构.
5.硬件搭建与调试
- -硬件安装: 按照设计方案, 将相机, 镜头 ,光源等硬件设备安装在合适的位置上, 并进行机械固定. 确保相机的安装位置稳定, 镜头与检测对象之间的距离和角度符合设计要求, 光源的安装==角度和亮度==能够满足检测要求
- 硬件连接:将相机通过对应的接口(如 GigE, USB3.0等) 连接到工业计算机上, 将光源的亮度, 颜色 ,角度等参数, 使检测对象在图像中具有良好的对比度和清晰度
- 硬件参数调试: 调整相机的曝光时间, 增益, 白平衡等参数, 以获取清晰, 稳定的图像. 调整光源的亮度, 颜色, 角度等参数, 使检测对象在图像中有良好的对比度和清晰度
- 硬件优化:如果发现硬件设备存在性能瓶颈, 如相机采集速度慢, 光源亮度不足等问题 ,及时更换或升级硬件设备
相关文章:
视觉硬件选型和算法选择(CNN)
基础知识 什么是机械视觉: 机械视觉是一种利用机器代替人眼来进行测量和判断的技术,通过光学系统、图像传感器等设备获取图像,并运用图像处理和分析算法来提取信息,以实现对目标物体的识别、检测、测量和定位等功能。 机械视觉与人类视觉有什…...

Mybatis篇
1,什么是Mybatis ( 1 )Mybatis 是一个半 ORM(对象关系映射)框架,它内部封装了 JDBC,开发时只需要关注 SQL 语句本身,不需要花费精力去处理加载驱动、创建连接、创建 statement 等繁…...

【Python】元组
个人主页:GUIQU. 归属专栏:Python 文章目录 1. 元组的本质与基础概念1.1 不可变序列的意义1.2 元组与数学概念的联系 2. 元组的创建方式详解2.1 标准创建形式2.2 单元素元组的特殊处理2.3 使用 tuple() 函数进行转换 3. 元组的基本操作深入剖析3.1 索引操…...

【AI实践】deepseek支持升级git
当前Windows 11 WSL的git是2.17,Android Studio提示需要升级到2.19版本 网上找到指导文章 安装git 2.19.2 cd /usr/src wget https://www.kernel.org/pub/software/scm/git/git-2.19.2.tar.gz tar xzf git-2.19.2.tar.gz cd git-2.19.2 make prefix/usr/l…...

【AI实践】Cursor上手-跑通Hello World和时间管理功能
背景 学习目的:熟悉Cursor使用环境,跑通基本开发链路。 本人背景:安卓开发不熟悉,了解科技软硬件常识 实践 基础操作 1,下载安装安卓Android Studio 创建一个empty project 工程,名称为helloworld 2&am…...

Redis数据库(二):Redis 常用的五种数据结构
Redis 能够做到高性能的原因主要有两个,一是它本身是内存型数据库,二是采用了多种适用于不同场景的底层数据结构。 Redis 常用的数据结构支持字符串、列表、哈希表、集合和有序集合。实现这些数据结构的底层数据结构有 6 种,分别是简单动态字…...

【计组】实验五 J型指令设计实验
目录 一、实验目的 二、实验环境 三、实验原理 四、实验任务 代码 一、实验目的 1. 理解MIPS处理器指令格式及功能。 2. 掌握lw, sw, beq, bne, lui, j, jal指令格式与功能。 3. 掌握ModelSim和ISE\Vivado工具软件。 4. 掌握基本的测试代码编写和FPGA开发板使用方法。 …...

ubuntu 本地部署deepseek r1 蒸馏模型
本文中的文件路径或网络代理需要根据自身环境自行删改 一、交互式chat页面 1.1 open-webui 交互窗口部署:基于docker安装,且支持联网搜索 Open WebUI 是一个可扩展、功能丰富且用户友好的自托管 AI 平台,旨在完全离线操作。它支持各种 LLM…...

RestTemplate Https 证书访问错误
错误信息 resttemplate I/O error on GET request for “https://21.24.6.6:9443/authn-api/v5/oauth/token”: java.security.cert.CertificateException: No subject alternative names present; nested exception is javax.net.ssl.SSLHandshakeException: java.security.c…...
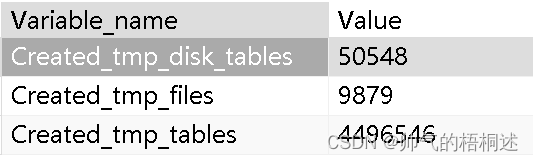
MySQL内存使用率高且不释放问题排查与总结
背景 生产环境mysql 5.7内存占用超过90%以上,且一直下不来。截图如下: 原因分析 1、确定mysql具体的占用内存大小,通过命令:cat /proc/Mysql进程ID/status查看 命令执行后的结果比较多(其他参数的含义想了解可参考这…...

mysql8 从C++源码角度看sql生成抽象语法树
在 MySQL 8 的 C 源码中,SQL 语句的解析过程涉及多个步骤,包括词法分析、语法分析和抽象语法树(AST)的生成。以下是详细的解析过程和相关组件的描述: 1. 词法分析器(Lexer) MySQL 使用一个称为…...

【DeepSeek】DeepSeek概述 | 本地部署deepseek
目录 1 -> 概述 1.1 -> 技术特点 1.2 -> 模型发布 1.3 -> 应用领域 1.4 -> 优势与影响 2 -> 本地部署 2.1 -> 安装ollama 2.2 -> 部署deepseek-r1模型 1 -> 概述 DeepSeek是由中国的深度求索公司开发的一系列人工智能模型,以其…...

【C++】多态原理剖析
目录 1.虚表指针与虚表 2.多态原理剖析 1.虚表指针与虚表 🍪类的大小计算规则 一个类的大小,实际就是该类中成员变量之和,需要注意内存对齐空类:编译器给空类一个字节来唯一标识这个类的对象 对于下面的Base类,它的…...

【Rust自学】20.4. 结语:Rust学习一阶段完成+附录
喜欢的话别忘了点赞、收藏加关注哦,对接下来的教程有兴趣的可以关注专栏。谢谢喵!(・ω・) 20.4.1. 总结 Rust初级学习之旅终于完成了!恭喜! 包括这篇文章,我们使用了110篇文章来学习Rust。 真…...

pytorch引用halcon写数据集
****加粗样式虽然啰嗦一点,但好歹halcon自己熟悉,不会忘记,用os 和 pil会导致脑子记得东西太多 import halcon as ha import torch from torch.utils.data import Datasetpath0 rE:\BaiduNetdiskDownload\cell class MyDataset(Dataset):de…...

让文物“活”起来,以3D数字化技术传承文物历史文化!
文物,作为不可再生的宝贵资源,其任何毁损都是无法逆转的损失。然而,当前文物保护与修复领域仍大量依赖传统技术,同时,文物管理机构和专业团队的力量相对薄弱,亟需引入数字化管理手段以应对挑战。 积木易搭…...

aarch64 Ubuntu20.04 安装docker
安装 docker 依赖项:sudo apt-get update sudo apt-get install apt-transport-https ca-certificates curl gnupg lsb-release添加 Docker GPG 密钥:curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /usr/share/keyr…...

JAVA:CloseableHttpClient 进行 HTTP 请求的技术指南
1、简述 CloseableHttpClient 是 Apache HttpComponents 提供的一个强大 HTTP 客户端库。它允许 Java 程序与 HTTP/HTTPS 服务交互,可以发送 GET、POST 等各种请求类型,并处理响应。该库广泛用于 REST API 调用、文件上传和下载等场景。 2、特性 Close…...

Mac上搭建k8s环境——Minikube
1、在mac上安装Minikube可执行程序 brew cask install minikub 安装后使用minikube version命令查看版本 2、安装docker环境 brew install --cask --appdir/Applications docker #安装docker open -a Docker #启动docker 3、安装kubectl curl -LO https://storage.g…...

经典排序算法复习----C语言
经典排序算法复习 分类 交换类 冒泡快排 分配类 计数排序基数排序 选择类 选择排序 堆排序 归并类 归并排序 插入类 直接插入排序 希尔排序 折半插入排序 冒泡排序 基于交换。每一轮找最大值放到数组尾部 //冒泡排序 void bubSort(int* arr,int size){bool sorte…...

艾尔登法环帧率解锁终极指南:告别卡顿,畅享丝滑游戏体验
艾尔登法环帧率解锁终极指南:告别卡顿,畅享丝滑游戏体验 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_m…...

混合求解器:用神经网络增强传统微分方程数值方法
1. 项目概述:当数值方法遇到机器学习在科学计算和工程仿真领域,求解常微分方程(ODE)和偏微分方程(PDE)是绕不开的核心任务。无论是模拟电路中的电流变化、预测天气系统的演变,还是分析机械结构的…...

MySQL GROUP BY 原理与优化
我刚工作的时候,有次统计每个用户的订单总金额,写了 SELECT user_id, SUM(amount) FROM orders GROUP BY user_id,结果执行了 60 秒还没出结果。DBA 帮我一看执行计划,发现没走索引,导致 Using temporary(用…...

WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南
WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 魔兽争霸III作为经典即时战…...

MongoDB Limit 与 Skip 方法详解
MongoDB Limit 与 Skip 方法详解 引言 MongoDB 是一个高性能、可伸缩的文档存储系统,它提供了强大的数据存储和查询功能。在处理大量数据时,Limit 与 Skip 方法是 MongoDB 中常用的查询优化工具。本文将详细介绍 MongoDB 中的 Limit 与 Skip 方法,包括其基本用法、性能影响…...

Unity Visual Scripting不是拖拽玩具:中阶开发者的编程范式重构指南
1. 为什么Unity官方Visual Scripting不是“拖拽完就能跑”的玩具,而是一套需要重新理解的编程范式很多人第一次点开Unity的Visual Scripting(VS)面板时,看到那些五颜六色的节点和丝滑的连线,下意识觉得:“这…...

Raspberry Pi Debug Probe:RP2040嵌入式开发的调试利器与实战指南
1. 项目概述:为什么你需要一个Raspberry Pi Debug Probe?如果你玩过树莓派Pico或者任何基于RP2040芯片的开发板,肯定遇到过这样的场景:写好的代码,点一下“上传”,然后……就没有然后了。板子上的LED没按你…...

高精度光照检测
光线检测仪,kotlin开发,调用手机感光模块检测室内外光照强度,用途多多,我主要用途孩子写作业检测光照保护视力。 食用方法∶打开即测,速度快,无广告,手机平视即可,无须直视光线。 买…...

别再只用递归了!用C语言栈实现非递归快速排序,内存效率提升实战
从递归到迭代:C语言栈实现非递归快速排序的工程实践 在嵌入式开发和大规模数据处理场景中,递归实现的快速排序常常面临栈溢出风险。当排序10万个元素的数组时,递归深度可能达到log₂100000≈17层,在仅有2KB栈空间的STM32F103上极易…...

通用物联网开发板设计:基于ESP8266的硬件集成与开发实践
1. 项目概述:为什么我们需要一块“通用”的物联网开发板?在捣鼓了几年物联网项目之后,我发现自己桌面上堆满了各种开发板:ESP8266、ESP32、Arduino Uno、STM32 Nucleo……每个项目都要重新连线、配置电源、焊接传感器接口…...