百问网imx6ullpro调试记录(linux+qt)
调试记录
文章目录
- 调试记录
- 进展
- 1.开发板相关
- 1.1百问网乌班图
- 密码
- 1.2 换设备开发环境搭建
- 串口调试
- 网络互通
- nfs文件系统挂载
- 1.3网络问题
- 1.4系统启动
- 1.5进程操作
- 2.QT
- 2.1tslib
- 1.获取源码
- 2.安装依赖文件
- 3.编译
- 2.2qt移植
- 1.获取qt源码
- 2.配置编译器
- 3.编译
- 2.3拷贝到开发板
- 1.拷贝
- 2.修改开发板配置文件
- qt
- tslib
- 3.验证是否生效
- 2.4安装Qt Creator
- 1.获取安装包
- 2.执行安装程序
- 3.删除版本不对的IDE(选做)
- 4.配置qtIDE环境
- 2.5移除自带qtgui
- 2.6添加字库
- 1.本地字库
- 2.中文乱码问题
- 2.7运行qt程序
- 3.QT编程
- 3.1窗口大小
进展
下一步,qt实现一个自制工具程序自定义标题栏实现Qicon 涉及到的控件笔记,然后使用component组件框架重新整合两个驱动程序调试验证,测试c和c++混合编程,将摄像头模块添加进去几个重要模块优先调试: eeprom DMA iic相关环境
开发板: 百问网imx6ullpro1.开发板相关
1.1百问网乌班图
密码
book: 123456
1.2 换设备开发环境搭建
串口调试
黑色的usb+typec串口线插拔前后注意设备管理器中端口的变化,新增端口即为要使用的端口
注意:找到端口后需要连接数据线然后重启开发板,这样串口才会正常打印调试
网络互通
看指导手册配置下面内容
学习笔记——韦东山Imx6ul pro环境搭建_韦东山repo-CSDN博客
保证开发板 windows 虚拟机在同一网段
开发板 192.168.5.9
windows 192.168.5.10
虚拟机 192.168.5.11
配置完成后测试
三者互ping正常即可,另虚拟机需要ping 外网保证正常上网
nfs文件系统挂载
mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt && cd /mnt
1.3网络问题
nfs网络失效,调试过程
日志查看网络报错
[root@imx6ull:/etc/network]# dmesg | grep -i eth
[ 2.331430] 20b4000.ethernet supply phy not found, using dummy regulator
[ 2.411339] fec 20b4000.ethernet eth0: registered PHC device 0
[ 2.418876] 2188000.ethernet supply phy not found, using dummy regulator
[ 2.483570] fec 2188000.ethernet eth1: registered PHC device 1
[ 2.550222] usbcore: registered new interface driver cdc_ether
[ 3.842954] Bluetooth: BNEP (Ethernet Emulation) ver 1.3
[ 67.458100] Generic PHY 20b4000.ethernet-1:01: attached PHY driver [Generic PHY] (mii_bus:phy_addr=20b4000.ethernet-1:01, irq=-1)
[ 67.470533] IPv6: ADDRCONF(NETDEV_UP): eth0: link is not ready[root@imx6ull:/etc/network]# ifconfig
eth0 Link encap:Ethernet HWaddr 00:01:3F:2D:3E:4Dinet addr:192.168.5.9 Bcast:0.0.0.0 Mask:255.255.255.0UP BROADCAST MULTICAST MTU:1500 Metric:1RX packets:0 errors:0 dropped:0 overruns:0 frame:0TX packets:0 errors:0 dropped:0 overruns:0 carrier:0collisions:0 txqueuelen:1000RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)lo Link encap:Local Loopbackinet addr:127.0.0.1 Mask:255.0.0.0inet6 addr: ::1/128 Scope:HostUP LOOPBACK RUNNING MTU:65536 Metric:1RX packets:502 errors:0 dropped:0 overruns:0 frame:0TX packets:502 errors:0 dropped:0 overruns:0 carrier:0collisions:0 txqueuelen:1RX bytes:37456 (36.5 KiB) TX bytes:37456 (36.5 KiB)网络接口没有连接到物理网络
[root@imx6ull:/etc/network]# ip link show eth0
3: eth0: <NO-CARRIER,BROADCAST,MULTICAST,UP> mtu 1500 qdisc pfifo_fast qlen 1000link/ether 00:01:3f:2d:3e:4d brd ff:ff:ff:ff:ff:ff总结:
网络连接问题:
网线下方闪烁灯不闪烁,说明硬件连接有问题,需要调整
调整好的软件log打印:
[root@imx6ull:/etc/network]# [ 801.735462] fec 20b4000.ethernet eth0: Link is Up - 100Mbps/Full - flow control rx/tx
[ 801.746055] IPv6: ADDRCONF(NETDEV_CHANGE): eth0: link becomes ready1.4系统启动
启动动画相关:
探究IMX6ULL启动原理并学会优雅关闭GUI和启动动画(适用韦东山、正点原子、野火)_正点原子imx6出厂开机动画-CSDN博客
1.5进程操作
查看进程
ps auxtop找到对应的pid号kill pid号 ----------停掉该进程kill -9 pid号 ----------强制停掉
2.QT
移植参考:QT移植到imx6ull ARM板子上面_qml移植到arm-CSDN博客
2.1tslib
tslib是触控相关的
1.获取源码
链接: https://pan.baidu.com/s/1YQ3QKRJiZajrYvvD_ODBIA 提取码: eiq7
这里面都有
2.安装依赖文件
sudo apt-get install autoconf
sudo apt-get install automake
sudo apt-get install libtool
3.编译
/home/book/temp/Qt/tslib-1.21
./configure --host=arm-buildroot-linux-gnueabihf ac_cv_func_malloc_0_nonnull=yes --cache-file=arm-buildroot-linux-gnueabihf.cache -prefix=/home/book/temp/Qt/tslib-1.21/arm-tslibmake
make installcd arm-tslib/
file bin/ts_calibrate
tslib编译输出路径/home/book/temp/Qt/tslib-1.21/arm-tslib
2.2qt移植
1.获取qt源码
Index of / (qt.io)
编写代码的版本和移植时的版本要一致
2.配置编译器

#
# qmake configuration for building with arm-linux-gnueabi-g++
#MAKEFILE_GENERATOR = UNIX
CONFIG += incremental
QMAKE_INCREMENTAL_STYLE = sublibQT_QPA_DEFAULT_PLATFORM = linuxfb
QMAKE_CFLAGS += -O2 -march=armv7-a -mtune=cortex-a7 -mfpu=neon -mfloat-abi=hard
QMAKE_CXXFLAGS += -O2 -march=armv7-a -mtune=cortex-a7 -mfpu=neon -mfloat-abi=hardinclude(../common/linux.conf)
include(../common/gcc-base-unix.conf)
include(../common/g++-unix.conf)# modifications to g++.conf
QMAKE_CC = arm-buildroot-linux-gnueabihf-gcc
QMAKE_CXX = arm-buildroot-linux-gnueabihf-g++
QMAKE_LINK = arm-buildroot-linux-gnueabihf-g++
QMAKE_LINK_SHLIB = arm-buildroot-linux-gnueabihf-g++# modifications to linux.conf
QMAKE_AR = arm-buildroot-linux-gnueabihf-ar cqs
QMAKE_OBJCOPY = arm-buildroot-linux-gnueabihf-objcopy
QMAKE_NM = arm-buildroot-linux-gnueabihf-nm -P
QMAKE_STRIP = arm-buildroot-linux-gnueabihf-strip
load(qt_config)主要修改编译器名字就行,其他的除非使用的板子差异很大不是ARMV7的要改一下
3.编译
编译配置脚本
这是我的qt源码路径:
/home/book/temp/Qt/qt-everywhere-src-5.12.9
tslib源码路径:/home/book/temp/Qt/tslib-1.21./configure -prefix /home/book/temp/Qt/qt-everywhere-src-5.12.9/arm-qt \
-opensource \
-confirm-license \
-release \
-strip \
-shared \
-xplatform linux-arm-gnueabi-g++ \
-optimized-qmake \
-c++std c++11 \
--rpath=no \
-pch \
-skip qt3d \
-skip qtactiveqt \
-skip qtandroidextras \
-skip qtcanvas3d \
-skip qtconnectivity \
-skip qtdatavis3d \
-skip qtdoc \
-skip qtgamepad \
-skip qtlocation \
-skip qtmacextras \
-skip qtnetworkauth \
-skip qtpurchasing \
-skip qtremoteobjects \
-skip qtscript \
-skip qtscxml \
-skip qtsensors \
-skip qtspeech \
-skip qtsvg \
-skip qttools \
-skip qttranslations \
-skip qtwayland \
-skip qtwebengine \
-skip qtwebview \
-skip qtwinextras \
-skip qtx11extras \
-skip qtxmlpatterns \
-make libs \
-make examples \
-nomake tools -nomake tests \
-gui \
-widgets \
-dbus-runtime \
--glib=no \
--iconv=no \
--pcre=qt \
--zlib=qt \
-no-openssl \
--freetype=qt \
--harfbuzz=qt \
-no-opengl \
-linuxfb \
--xcb=no \
-tslib \
--libpng=qt \
--libjpeg=qt \
--sqlite=qt \
-plugin-sql-sqlite \
-I/home/book/temp/Qt/tslib-1.21/arm-tslib/include \
-L/home/book/temp/Qt/tslib-1.21/arm-tslib/lib \
-recheck-all编译
make -j16
注意:之前编译过的这里可能会出错,需要make clean清除中间文件后再make
安装
make install
2.3拷贝到开发板
编译生成的arm平台qt环境目录:arm-qt
编译生成的arm平台tslib环境目录:tslib-arm
准备工作:
确保虚拟机和开发板可以通过nfs互传文件
或者使用u盘之类的去拷贝也行,我没搞,不介绍
1.拷贝
将生成的文件拷贝到nfs文件目录下
将开发板/mnt下的arm-qt 和 arm-tslib文件复制到 /usr/lib下面cp -r arm-tslib/ /usr/lib/
cp -r arm-qt/ /usr/lib/
2.修改开发板配置文件
qt
配置开发板qt的环境变量: vi /etc/profile
export QT_ROOT=/usr/lib/arm-qt
export QT_QPA_GENERIC_PLUGINS=tslib:/dev/input/event4
export QT_QPA_FONTDIR=/usr/share/fonts
export QT_QPA_PLATFORM_PLUGIN_PATH=$QT_ROOT/plugins
export QT_QPA_PLATFORM=linuxfb:tty=/dev/fb0
export QT_PLUGIN_PATH=$QT_ROOT/plugins
export LD_LIBRARY_PATH=$QT_ROOT/lib:$QT_ROOT/plugins/platforms
export QML2_IMPORT_PATH=$QT_ROOT/qml
export QT_QPA_FB_TSLIB=1
保存,执行source /etc/profile
使其生效
tslib
vi /etc/profileexport TSLIB_ROOT=/usr/lib/arm-tslib
export TSLIB_CONSOLEDEVICE=none
export TSLIB_FBDEVICE=/dev/fb0
export TSLIB_TSDEVICE=/dev/input/event1
export TSLIB_CONFFILE=$TSLIB_ROOT/etc/ts.conf
export TSLIB_PLUGINDIR=$TSLIB_ROOT/lib/ts
export LD_PRELOAD=$TSLIB_ROOT/lib/libts.so
电阻屏请加上
export TSLIB_CALIBFILE=/etc/pointercal
3.验证是否生效
qt测试
cd /usr/lib/arm-qt/examples/widgets/animation/animatedtiles
./animatedtiles
tslib测试
cd /usr/lib/arm-tslib/bin
./ts_test
ok,移植成功
2.4安装Qt Creator
1.获取安装包
安装包:
链接: https://pan.baidu.com/s/1YQ3QKRJiZajrYvvD_ODBIA 提取码: eiq7
拷贝到虚拟机中
2.执行安装程序
chmod u+x qt-opensource-linux-x64-5.12.9.run
sudo ./qt-opensource-linux-x64-5.12.9.run // 建议加sudo,否则安装在当前目录下。
按照指引安装就好,一般都是默认,第一次安装的话,建议搜个博客
3.删除版本不对的IDE(选做)
找到安装目录删除就是
4.配置qtIDE环境
配置编译器
Arm-GCC
这个是我的开发板用的编译器
gcc:
/home/book/100ask_imx6ull-sdk/ToolChain/arm-buildroot-linux-gnueabihf_sdk-buildroot/bin/arm-buildroot-linux-gnueabihf-gcc
g++:
/home/book/100ask_imx6ull-sdk/ToolChain/arm-buildroot-linux-gnueabihf_sdk-buildroot/bin/arm-buildroot-linux-gnueabihf-g++
正点原子教程里面的编译器,搞混会导致编译出错
/usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/bin/arm-linux-gnueabihf-g++
配置qmake
按照上面给的那个博客搞就好了,这里不写了,不做重复工作
2.5移除自带qtgui
启动动画相关:
探究IMX6ULL启动原理并学会优雅关闭GUI和启动动画(适用韦东山、正点原子、野火)_正点原子imx6出厂开机动画-CSDN博客
把启动目录里面文件换地方
mv /etc/init.d/S99myirhmi2 /root &&reboot
建议备份
恢复
mv /root/S99myirhmi2 /etc/init.d &&reboot
2.6添加字库
1.本地字库
C:\Windows\Fonts
将字库文件cp到nfs目录
再cp到 /usr/share/fonts注意:使用中文的话,建议找一个支持中文的字库文件进行拷贝
2.中文乱码问题
main函数中添加头文件
#include <QTextCodec>QTextCodec *codec = QTextCodec::codecForName("utf-8");
QTextCodec::setCodecForLocale(codec);忽略不计,试过了不生效
2.7运行qt程序
点击构建
在对应的构建目录下有生成的arm程序
cp到nfs目录中
./执行
cd /home/book/QT/projects/build-button_test-Arm_Qt5_12_9-Debugcp button_test ~/nfs_rootfs/cd /home/book/QT/projects/build-work_tools-Arm_Qt5_12_9-Debugcp /home/book/QT/projects/build-work_tools-Arm_Qt5_12_9-Debug/work_tools ~/nfs_rootfs/目前问题:最大最小功能无法使用3.QT编程
3.1窗口大小
窗口完全适应不同的屏幕大小
#include <QGuiApplication>
#include <QScreen>QList <QScreen *> list_screen = QGuiApplication::screens();/* 重设大小 */this->resize(list_screen.at(0)->geometry().width(),list_screen.at(0)->geometry().height());
./执行
cd /home/book/QT/projects/build-button_test-Arm_Qt5_12_9-Debug
cp button_test ~/nfs_rootfs/
cd /home/book/QT/projects/build-work_tools-Arm_Qt5_12_9-Debug
cp /home/book/QT/projects/build-work_tools-Arm_Qt5_12_9-Debug/work_tools ~/nfs_rootfs/
目前问题:最大最小功能无法使用
暂不更新,后续使用qml做界面了
相关文章:
百问网imx6ullpro调试记录(linux+qt)
调试记录 文章目录 调试记录进展1.开发板相关1.1百问网乌班图密码 1.2 换设备开发环境搭建串口调试网络互通nfs文件系统挂载 1.3网络问题1.4系统启动1.5进程操作 2.QT2.1tslib1.获取源码2.安装依赖文件3.编译 2.2qt移植1.获取qt源码2.配置编译器3.编译 2.3拷贝到开发板1.拷贝2.…...

【python】3_容器
目录 一、列表 list 1.1基本语法 1.2 常用操作方法 1.3 列表的遍历 二、元组 tuple 特点: 三、字符串 常用操作方法: 四、序列 操作方法:切片 五、元素 特点: 基本语法: 集合常用功能: 六、字…...
数据结构与算法:动态规划dp:背包问题:理论基础(状态压缩/滚动数组)和相关力扣题(416. 分割等和子集、1049.最后一块石头的重量Ⅱ、494.目标和)
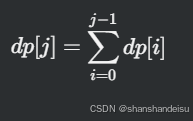
背包问题 01背包理论基础 对于01背包问题,物品下标为0到i,对应的重量为weight[0]到weight[i],价值为value[0]到value[i],每个物品只可以取或不取,背包最大容量为j的场景。 常见的状态转移方程如下: dp[i…...

数字游牧时代:IT人力外包的范式革命与文明重构
当英国工业革命时期的企业主们将生产环节外包给家庭作坊时,他们不会想到这种生产组织方式会演变为21世纪最复杂的商业形态。IT人力外包行业在经历三十年爆炸式增长后,正在经历一场静默的范式革命。这场革命不仅重构着全球IT产业链的拓扑结构,…...

Qt - 地图相关 —— 3、Qt调用高德在线地图功能示例(附源码)
效果 作者其他相关文章链接: Qt - 地图相关 —— 1、加载百度在线地图(附源码) Qt - 地图相关 —— 2、Qt调用百度在线地图功能示例全集,包含线路规划、地铁线路查询等(附源码) Qt - 地图相关 —— 3、Qt调用…...
cloudberry测试
一、引言 在当今大数据和 AI 飞速发展的时代,数据如同企业的核心资产,其价值不言而喻。数据库作为数据存储、管理和处理的关键工具,更是成为了各个领域的技术基石。无论是金融行业的交易记录处理,还是医疗领域的患者信息管理&…...

RocketMQ、RabbitMQ、Kafka 的底层实现、功能异同、应用场景及技术选型分析
1️⃣ 引言 在现代分布式系统架构中,📩消息队列(MQ)是不可或缺的组件。它在系统🔗解耦、📉流量削峰、⏳异步处理等方面发挥着重要作用。目前,主流的消息队列系统包括 🚀RocketMQ、&…...

UWB功耗大数据插桩调研
一、摘要 UWB功耗点 插桩点 日志关键字 电流 蓝牙持锁 BatteryStats的锁统计 vendor_bluetooth_lock 30~40mA 测距 UwbSessionManager.startRanging UwbSessionManager.stoptRanging 或接入fadiKey Uwb状态广播 "com.fadiui.dkservice.action.uwb.state.change&q…...

郭羽冲IOI2024参赛总结
非常荣幸能代表中国参加第 36 36 36 届国际信息学奥林匹克竞赛( I O I 2024 IOI2024 IOI2024)。感谢 C C F CCF CCF 为我们提供竞赛的平台,感谢随行的老师们一路上为我们提供的帮助与支持。 在每场比赛的前一个晚上,领队、副领…...

03:Spring之Web
一:Spring整合web环境 1:web的三大组件 Servlet:核心组件,负责处理请求和生成响应。 Filter:用于请求和响应的预处理和后处理,增强功能。 Listener:用于监听 Web 应用中的事件,实…...

lx-music落雪音乐-开源免费听歌软件[提供最新音源使用, 支持全网平台, 支持无损音乐下载]
lx-music_落雪音乐 链接:https://pan.xunlei.com/s/VOIpEt1xqf0un-vEQilidhjIA1?pwdgcux#...

129,【2】buuctf [BJDCTF2020]EzPHP
进入靶场 查看源代码 看到红框就知道对了 她下面那句话是编码后的,解码 1nD3x.php <?php // 高亮显示当前 PHP 文件的源代码,通常用于调试和展示代码结构 highlight_file(__FILE__); // 设置错误报告级别为 0,即不显示任何 PHP 错误信息…...

Python 面向对象(类,对象,方法,属性,魔术方法)
前言:在讲面向对象之前,我们先将面向过程和面向对象进行一个简单的分析比较,这样我们可以更好的理解与区分,然后我们在详细的讲解面向对象的优势。 面向过程(Procedure-Oriented Programming,POP࿰…...

C语言之扫雷
C语言之扫雷 game.hgame.ctest.c 参考 https://blog.csdn.net/m0_62391199/article/details/124694375 game.h #pragma once #include <stdio.h> #include <time.h> #include <stdlib.h>#define ROW 9 #define COL 9#define ROWS ROW2 #define COLS COL2#de…...

半导体制造工艺讲解
目录 一、半导体制造工艺的概述 二、单晶硅片的制造 1.单晶硅的制造 2.晶棒的切割、研磨 3.晶棒的切片、倒角和打磨 4.晶圆的检测和清洗 三、晶圆制造 1.氧化与涂胶 2.光刻与显影 3.刻蚀与脱胶 4.掺杂与退火 5.薄膜沉积、金属化和晶圆减薄 6.MOSFET在晶圆表面的形…...
Ollama+DeepSeek R1+AnythingLLM训练自己的AI智能助手
1.下载Ollama安装 1.1.安装Ollama Ollama官网:Ollama 下载Ollama,点击“Download”按钮。 根据电脑操作系统,下载合适的版本即可。 下载完成后点击安装,完成后安装窗口会自动关闭,你的系统托盘图标会出现一个Ollama图标。 1.2.…...

基于java手机销售网站设计和实现(LW+源码+讲解)
专注于大学生项目实战开发,讲解,毕业答疑辅导,欢迎高校老师/同行前辈交流合作✌。 技术范围:SpringBoot、Vue、SSM、HLMT、小程序、Jsp、PHP、Nodejs、Python、爬虫、数据可视化、安卓app、大数据、物联网、机器学习等设计与开发。 主要内容:…...

5-R循环
R 循环 有的时候,我们可能需要多次执行同一块代码。一般情况下,语句是按顺序执行的:函数中的第一个语句先执行,接着是第二个语句,依此类推。 编程语言提供了更为复杂执行路径的多种控制结构。 循环语句允许我们多…...
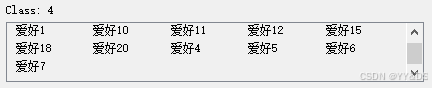
Qlabel 每五个一换行 并、号分割
学习点 Qlabel 每五个一换行 并、号分割 QString MainWindow::formatHobbies(const std::set<QString>& hobbies) {QString formattedHobbies;int count 0;for (const QString& hobby : hobbies) {if (count > 0 && count % 5 0)formattedHobbies…...

加速PyTorch模型训练:自动混合精度(AMP)
在深度学习领域,模型训练的速度和效率尤为重要。为了提升训练速度并减少显存占用(较复杂的模型中),PyTorch自1.6版本起引入了自动混合精度(Automatic Mixed Precision, AMP)功能。 AMP简单介绍 是一种训练…...

STM32F103C6 USB DFU升级实战:从CubeMX配置到DfuSeDemo烧录,一步步教你搞定Bootloader设计
STM32F103C6 USB DFU升级全流程解析:从硬件配置到安全跳转的深度实践 在嵌入式开发中,固件升级是产品生命周期中不可或缺的环节。想象一下这样的场景:你的设备已经部署在客户现场,突然发现一个需要紧急修复的BUG,或者需…...

蓝芯算力:RISC-V 芯片破局之路
字节跳动前高管卢山创办的蓝芯算力完成数亿元融资,专注 RISC-V AI 算力芯片研发。目前已获超 20 万片订单,在 x86 和 ARM 主导的市场中开辟差异化道路。创始人背景与创业初衷蓝芯算力创始人卢山毕业于清华,有超 20 年芯片设计经验。他曾就职英…...

数据架构现代化:AI应用落地的关键突破口
数据架构现代化:AI应用落地的关键突破口 一、引言:为什么你的AI项目总卡在“数据关”? 1. 一个扎心的真实场景 去年,我遇到一位零售企业的技术负责人,他的困惑让我印象深刻:“我们花了12个月、近500万预算&…...

【渗透测试】HTB靶场之Lock 全过程wp
息收集 目标ip:10.129.234.64 kali ip:10.10.16.4 ┌──(root㉿kali)-[~/桌面/HTB]└─# nmap -A -T4 10.129.234.64 Starting Nmap 7.95 ( https://nmap.org ) at 2026-02-15 01:34 ESTNmap scan report for 10.129.234.64Host is up (0.30s latency).Not shown: 996 filte…...

轻量部署开源网络性能测试工具:从环境搭建到性能调优全指南
轻量部署开源网络性能测试工具:从环境搭建到性能调优全指南 【免费下载链接】speedtest 项目地址: https://gitcode.com/gh_mirrors/spe/speedtest 在网络运维与开发过程中,准确掌握网络带宽性能是保障服务质量的关键。本文将介绍如何使用开源速…...
)
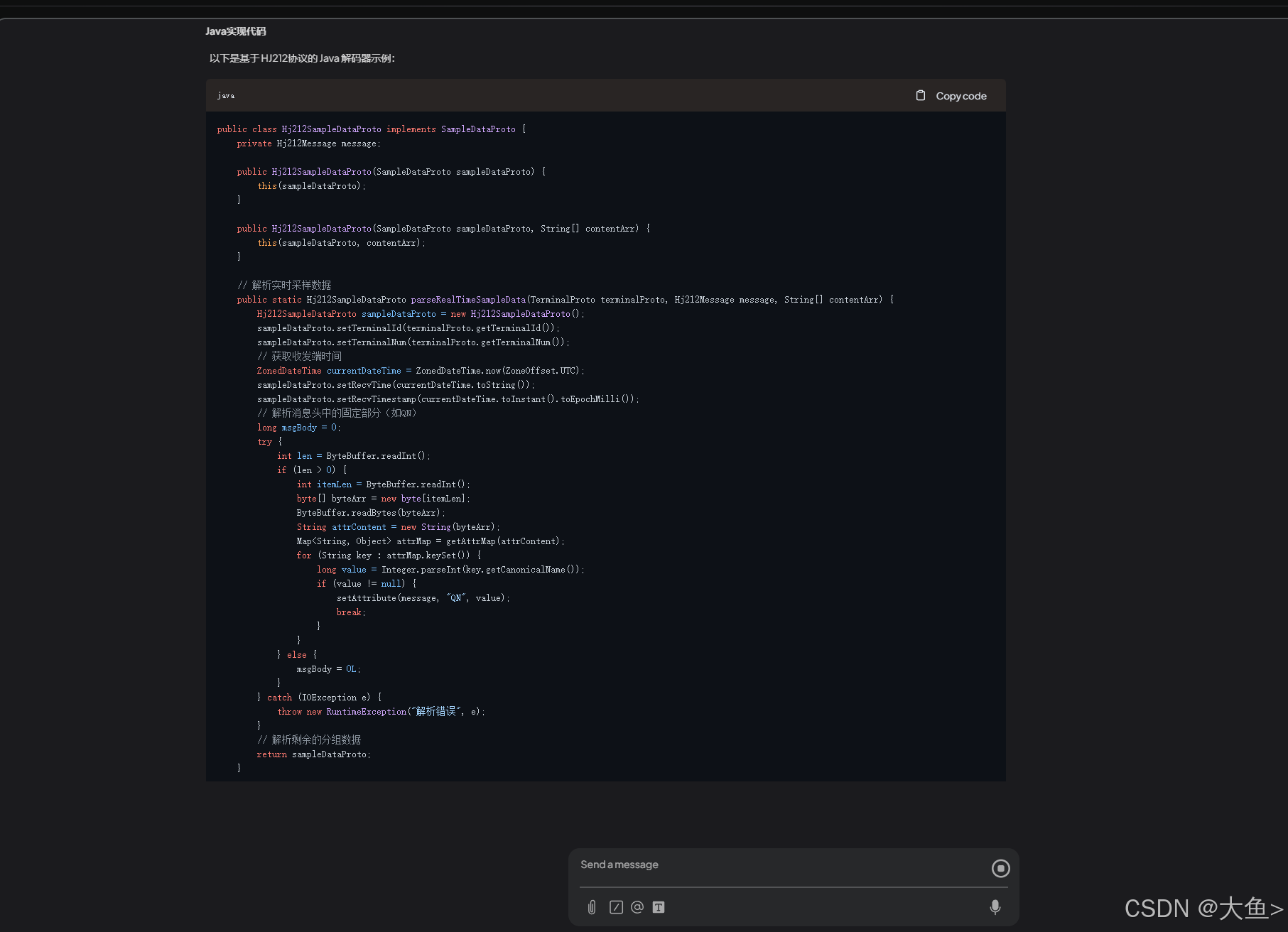
JS逆向新手也能搞定:手把手教你用Node.js补全ali140滑块canvas环境(附完整代码)
JS逆向新手也能搞定:手把手教你用Node.js补全ali140滑块canvas环境(附完整代码) 第一次接触JS逆向时,看到那些复杂的加密逻辑和环境检测代码,确实让人望而生畏。特别是遇到canvas这种需要模拟浏览器环境的场景…...

LongCat-Image-Edit与QT结合:开发跨平台动物图片编辑器
LongCat-Image-Edit与QT结合:开发跨平台动物图片编辑器 1. 引言 你有没有想过,给你的宠物猫戴上一顶小帽子,或者让家里的狗狗变身成熊猫?传统的图片编辑软件操作复杂,需要学习各种图层和工具,而现在的AI技…...

如何零门槛拥有专属AI数字人?Duix.Avatar全流程实践指南
如何零门槛拥有专属AI数字人?Duix.Avatar全流程实践指南 【免费下载链接】Duix-Avatar 项目地址: https://gitcode.com/GitHub_Trending/he/Duix-Avatar 想制作个人数字分身却被技术门槛劝退?每月花费数千元购买商业数字人服务让你望而却步&…...

教育软件控制突破:JiYuTrainer的内核级反控制解决方案
教育软件控制突破:JiYuTrainer的内核级反控制解决方案 【免费下载链接】JiYuTrainer 极域电子教室防控制软件, StudenMain.exe 破解 项目地址: https://gitcode.com/gh_mirrors/ji/JiYuTrainer 副标题:技术原理、实现路径与教育场景应用指南 一、…...
参数配置)
EEVDF调度器完全调优指南:从lag公式推导到place_entity()参数配置
EEVDF调度器完全调优指南:从lag公式推导到place_entity()参数配置 在Linux内核6.6版本中,EEVDF(Earliest Eligible Virtual Deadline First)调度器正式取代CFS成为默认进程调度算法。这一变革不仅带来了更精细的权重分配机制&…...