OpenCV 相机标定流程指南
- OpenCV 相机标定流程指南
- 前置准备
- 标定流程
- 结果输出与验证
- 建议
- 源代码


OpenCV 相机标定流程指南
https://docs.opencv.org/4.x/dc/dbb/tutorial_py_calibration.html
https://learnopencv.com/camera-calibration-using-opencv/
前置准备
- 制作标定板:生成高精度棋盘格或圆点标定板。
- 采集标定板图像:在不同角度、距离和光照条件下采集多张标定板图像。
OpenCV 官方标定板生成脚本使用教程
!OpenCV 官方标定板脚本下载

访问我的源代码仓库下载已经生成的矢量棋盘网格,使用打印机打印出来即可进行图像标定采集工作。
标定流程
使用 CameraCalib 类进行相机标定:
- 添加图像样本:将采集的标定板图像导入标定系统。
- 并发检测角点:利用多线程技术并行检测图像中的角点或特征点。
- 相机标定:基于检测到的角点,计算相机内参(焦距、主点坐标)和外参(旋转矩阵、平移向量),并优化畸变系数。
结果输出与验证
- 打印标定结果:输出相机内参、外参及畸变系数。
- 测试图像标定:使用标定结果对测试图像进行畸变校正,验证标定精度。
建议
可信误差:重投影误差应小于 0.5 像素,最大不超过 1.0 像素。
采集夹角要求:摄像头与标定板平面的夹角应控制在 30°~60° 之间,避免极端角度。
[1] https://www.microsoft.com/en-us/research/publication/a-flexible-new-technique-for-camera-calibration/
源代码
#include <opencv2/opencv.hpp>
#include <algorithm>
#include <memory>
#include <vector>
#include <string>
#include <print>
#include <iostream>class CameraCalib
{
public:// 校准模式enum class Pattern : uint32_t {CALIB_SYMMETRIC_CHESSBOARD_GRID, // 规则排列的棋盘网格 // chessboardCALIB_MARKER_CHESSBOARD_GRID, // 额外标记的棋盘网格 // marker chessboardCALIB_SYMMETRIC_CIRCLES_GRID, // 规则排列的圆形网格 // circlesCALIB_ASYMMETRIC_CIRCLES_GRID, // 交错排列的圆形网格 // acirclesCALIB_PATTERN_COUNT, // 标定模式的总数量 用于 for 循环遍历 std::to_underlying(Pattern::CALIB_PATTERN_COUNT);};struct CameraCalibrationResult {cv::Mat cameraMatrix; // 相机矩阵(内参数)cv::Mat distortionCoefficients; // 畸变系数double reprojectionError; // 重投影误差(标定精度指标)std::vector<cv::Mat> rotationVectors; // 旋转向量(外参数)std::vector<cv::Mat> translationVectors; // 平移向量(外参数)};explicit CameraCalib(int columns, int rows, double square_size /*mm*/, Pattern pattern): patternSize_(columns, rows), squareSize_(square_size), pattern_(pattern) {// 构造一个与标定板对应的真实的世界角点数据for(int y = 0; y < patternSize_.height; ++y) {for(int x = 0; x < patternSize_.width; ++x) {realCorners_.emplace_back(x * square_size, y * square_size, 0.0f);}}}void addImageSample(const cv::Mat &image) { samples_.emplace_back(image); }void addImageSample(const std::string &filename) {cv::Mat mat = cv::imread(filename, cv::IMREAD_COLOR);if(mat.empty()) {std::println(stderr, "can not load filename: {}", filename);return;}addImageSample(mat);}bool detectCorners(const cv::Mat &image, std::vector<cv::Point2f> &corners) {bool found;switch(pattern_) {using enum Pattern;case CALIB_SYMMETRIC_CHESSBOARD_GRID: detectSymmetricChessboardGrid(image, corners, found); break;case CALIB_MARKER_CHESSBOARD_GRID: detectMarkerChessboardGrid(image, corners, found); break;case CALIB_SYMMETRIC_CIRCLES_GRID: detectSymmetricCirclesGrid(image, corners, found); break;case CALIB_ASYMMETRIC_CIRCLES_GRID: detectAsymmetricCirclesGrid(image, corners, found); break;default: break;}return found;}std::vector<std::vector<cv::Point2f>> detect() {std::vector<std::vector<cv::Point2f>> detectedCornerPoints;std::mutex mtx; // 使用 mutex 来保护共享资源std::atomic<int> count;std::for_each(samples_.cbegin(), samples_.cend(), [&](const cv::Mat &image) {std::vector<cv::Point2f> corners;bool found = detectCorners(image, corners);if(found) {count++;std::lock_guard<std::mutex> lock(mtx); // 使用 lock_guard 来保护共享资源detectedCornerPoints.push_back(corners);}});std::println("Detection successful: {} corners, total points: {}", int(count), detectedCornerPoints.size());return detectedCornerPoints;}std::unique_ptr<CameraCalibrationResult> calib(std::vector<std::vector<cv::Point2f>> detectedCornerPoints, int width, int height) {// 准备真实角点的位置std::vector<std::vector<cv::Point3f>> realCornerPoints;for(size_t i = 0; i < detectedCornerPoints.size(); ++i) {realCornerPoints.emplace_back(realCorners_);}cv::Size imageSize(width, height);// 初始化相机矩阵和畸变系数cv::Mat cameraMatrix = cv::Mat::eye(3, 3, CV_64F);cv::Mat distCoeffs = cv::Mat::zeros(5, 1, CV_64F);std::vector<cv::Mat> rvecs, tvecs;// 进行相机标定double reproError = cv::calibrateCamera(realCornerPoints, detectedCornerPoints, imageSize, cameraMatrix, distCoeffs, rvecs, tvecs, cv::CALIB_FIX_K1 + cv::CALIB_FIX_K2 + cv::CALIB_FIX_K3 + cv::CALIB_FIX_K4 + cv::CALIB_FIX_K5);// 将标定结果存储到结构体中auto result = std::make_unique<CameraCalibrationResult>();result->cameraMatrix = cameraMatrix;result->distortionCoefficients = distCoeffs;result->reprojectionError = reproError;result->rotationVectors = rvecs;result->translationVectors = tvecs;return result;}// 打印标定结果void print(const std::unique_ptr<CameraCalibrationResult> &result) {std::cout << "重投影误差: " << result->reprojectionError << std::endl;std::cout << "相机矩阵:\n" << result->cameraMatrix << std::endl;std::cout << "畸变系数:\n" << result->distortionCoefficients << std::endl;}// 进行畸变校正测试void test(const std::string &filename, const std::unique_ptr<CameraCalibrationResult> ¶m) {// 读取一张测试图像cv::Mat image = cv::imread(filename);if(image.empty()) {std::println("can not load filename");return;}cv::Mat undistortedImage;cv::undistort(image, undistortedImage, param->cameraMatrix, param->distortionCoefficients);// 显示原图和校准后的图cv::namedWindow("Original Image", cv::WINDOW_NORMAL);cv::namedWindow("Undistorted Image", cv::WINDOW_NORMAL);cv::imshow("Original Image", image);cv::imshow("Undistorted Image", undistortedImage);// 等待用户输入任意键cv::waitKey(0);}private:void dbgView(const cv::Mat &image, const std::vector<cv::Point2f> &corners, bool &found) {if(!found) {std::println("Cannot find corners in the image");}// Debug and view detected corner points in imagesif constexpr(false) {cv::drawChessboardCorners(image, patternSize_, corners, found);cv::namedWindow("detectCorners", cv::WINDOW_NORMAL);cv::imshow("detectCorners", image);cv::waitKey(0);cv::destroyAllWindows();}}void detectSymmetricChessboardGrid(const cv::Mat &image, std::vector<cv::Point2f> &image_corners, bool &found) {if(found = cv::findChessboardCorners(image, patternSize_, image_corners); found) {cv::Mat gray;cv::cvtColor(image, gray, cv::COLOR_BGR2GRAY);cv::cornerSubPix(gray, image_corners, cv::Size(11, 11), cv::Size(-1, -1), cv::TermCriteria(cv::TermCriteria::EPS + cv::TermCriteria::COUNT, 30, 0.01));dbgView(image, image_corners, found);}}void detectMarkerChessboardGrid(const cv::Mat &image, std::vector<cv::Point2f> &image_corners, bool &found) {if(found = cv::findChessboardCornersSB(image, patternSize_, image_corners); found) {dbgView(image, image_corners, found);}}void detectSymmetricCirclesGrid(const cv::Mat &image, std::vector<cv::Point2f> &image_corners, bool &found) {if(found = cv::findCirclesGrid(image, patternSize_, image_corners, cv::CALIB_CB_SYMMETRIC_GRID); found) {cv::Mat gray;cv::cvtColor(image, gray, cv::COLOR_BGR2GRAY);cv::cornerSubPix(gray, image_corners, cv::Size(11, 11), cv::Size(-1, -1), cv::TermCriteria(cv::TermCriteria::EPS + cv::TermCriteria::COUNT, 30, 0.01));dbgView(image, image_corners, found);}}void detectAsymmetricCirclesGrid(const cv::Mat &image, std::vector<cv::Point2f> &image_corners, bool &found) {cv::SimpleBlobDetector::Params params;params.minThreshold = 8;params.maxThreshold = 255;params.filterByArea = true;params.minArea = 50; // 适当降低,以便检测小圆点params.maxArea = 5000; // 适当降低,以避免误检大区域params.minDistBetweenBlobs = 10; // 调小以适应紧密排列的圆点params.filterByCircularity = false; // 允许更圆的形状params.minCircularity = 0.7; // 只有接近圆的目标才被识别params.filterByConvexity = true;params.minConvexity = 0.8; // 只允许较凸的形状params.filterByInertia = true;params.minInertiaRatio = 0.1; // 适应不同形状params.filterByColor = false; // 关闭颜色过滤,避免黑白检测问题auto blobDetector = cv::SimpleBlobDetector::create(params);if(found = cv::findCirclesGrid(image, patternSize_, image_corners, cv::CALIB_CB_ASYMMETRIC_GRID | cv::CALIB_CB_CLUSTERING, blobDetector); found) {cv::Mat gray;cv::cvtColor(image, gray, cv::COLOR_BGR2GRAY);cv::cornerSubPix(gray, image_corners, cv::Size(11, 11), cv::Size(-1, -1), cv::TermCriteria(cv::TermCriteria::EPS + cv::TermCriteria::COUNT, 30, 0.01));dbgView(image, image_corners, found);}}private:cv::Size patternSize_;double squareSize_;Pattern pattern_;std::vector<cv::Point3f> realCorners_;std::vector<cv::Mat> samples_;
};// 测试函数
static void test_CameraCalib() {// 创建一个 CameraCalib 对象,指定标定板大小、每个方格的边长和校准模式CameraCalib calib(14, 9, 12.1, CameraCalib::Pattern::CALIB_MARKER_CHESSBOARD_GRID);// 加载图像样本std::vector<cv::String> result;cv::glob("calibration_images/*.png", result, false);for (auto &&filename : result) {calib.addImageSample(filename);}// 检测角点auto detectedCornerPoints = calib.detect();// 进行相机标定std::string filename = "calibration_images/checkerboard_radon.png";cv::Mat image = cv::imread(filename);if (image.empty()) {std::println("can not load image");return;}auto param = calib.calib(detectedCornerPoints, image.cols, image.cols);// 打印标定结果calib.print(param);// 测试函数calib.test(filename, param);
}
运行测试函数,输出结果如下所示:
Detection successful: 2 corners, total points: 2
重投影误差: 0.0373256
相机矩阵:
[483030.3184975122, 0, 1182.462802265994;0, 483084.13533141, 1180.358683128085;0, 0, 1]
畸变系数:
[0;0;-0.002454905573938355;9.349667940808669e-05;0]
// 保存标定结果
cv::FileStorage fs("calibration_result.yml", cv::FileStorage::WRITE);
fs << "camera_matrix" << result.cameraMatrix;
fs << "distortion_coefficients" << result.distCoeffs;
fs << "image_size" << result.imageSize;
fs.release();
相关文章:
OpenCV 相机标定流程指南
OpenCV 相机标定流程指南 前置准备标定流程结果输出与验证建议源代码 OpenCV 相机标定流程指南 https://docs.opencv.org/4.x/dc/dbb/tutorial_py_calibration.html https://learnopencv.com/camera-calibration-using-opencv/ 前置准备 制作标定板:生成高精度棋…...

项目场景拷打
补偿事务解决超卖 通过补偿事务避免超卖问题,可以通过以下几种方式实现: 1. 使用数据库事务与锁机制 事务管理:将库存扣减和订单生成操作放在同一个数据库事务中,确保操作的原子性。如果事务中任何一个步骤失败,则整…...

Vue2生命周期面试题
在 Vue 2 中,this.$el 和 this.$data 都是 Vue 实例的属性,代表不同的内容。 1. this.$el this.$el 是 Vue 实例的根 DOM 元素,它指向 Vue 实例所控制的根节点元素。在 Vue 中,el 是在 Vue 实例创建时,指定的根元素&…...

【每日一题 | 2025】2.3 ~ 2.9
个人主页:GUIQU. 归属专栏:每日一题 文章目录 1. 【2.3】P8784 [蓝桥杯 2022 省 B] 积木画2. 【2.4】P8656 [蓝桥杯 2017 国 B] 对局匹配3. 【2.5】[ABC365D] AtCoder Janken 34. 【2.6】P8703 [蓝桥杯 2019 国 B] 最优包含5. 【2.7】P8624 [蓝桥杯 2015…...

使用OpenGL自己定义一个button,响应鼠标消息:掠过、点击、拖动
button需要有一个外观 外观 大小跟随窗口改变,采用纯色背景、纯色文字 文字 大小跟随窗口改变 button需要获得鼠标消息 掠过 鼠标掠过时 button 出现阴影,鼠标掠过后 button 阴影消失 点击 点击后进入相应事件 拖动 改变图标所在位置 需要在g…...

C# 上位机--变量
C# 上位机--变量 在 C# 上位机开发领域,变量是构建程序逻辑的基础元素之一。它就像是一个容器,用于存储各种类型的数据,从简单的数值到复杂的对象。正确理解和使用变量,对于开发出高效、稳定且易于维护的上位机程序至关重要。本文…...

网络安全检查漏洞内容回复 网络安全的漏洞
的核心目标是保障业务系统的可持续性和数据的安全性,而这两点的主要威胁来自于蠕虫的暴发、黑客的攻击、拒绝服务攻击、木马。蠕虫、黑客攻击问题都和漏洞紧密联系在一起,一旦有重大安全漏洞出现,整个互联网就会面临一次重大挑战。虽然传统木…...

【GIS】本地部署nominatim地理编码服务
参考:https://www.cnblogs.com/nonkicat/p/17222677.html docker 部署命令 4.5 版本 docker 用不了,需要用 4.0 版本 docker run -it -e PBF_PATH/data/你的osm文件.osm.pbf -e FREEZEtrue -e POSTGRES_MAX_CONNECTIONS100 -p 6666:8080 --…...

HTML之JavaScript对象声明
HTML之JavaScript对象声明 常用:方式1:new Object() 创建一个空对象方式2:{属性名:属性值,属性名:属性值,...函数名:function(){}} 创建一个对象<!DOCTYPE html> <html lang"en"> <head><meta charset&quo…...

PyCharm结合DeepSeek-R1
PyCharm结合DeepSeek-R1,打造专属 AI 编程助手 在程序员的日常工作中,提高编程效率、快速解决代码问题是重中之重。今天给大家分享一个强强联合的组合 ——PyCharm 插件 Continue 与 DeepSeek-R1,它们能帮你打造出强大的个人 AI 编程助手。 …...
innovus如何分步长func和dft时钟
在Innovus工具中,分步处理功能时钟(func clock)和DFT时钟(如扫描测试时钟)需要结合设计模式(Function Mode和DFT Mode)进行约束定义、时钟树综合(CTS)和时序分析。跟随分…...

1.1 单元测试核心原则
单元测试核心原则 单元测试是软件质量保障的第一道防线,其核心目标是通过最小粒度的测试验证代码逻辑的正确性。以下是编写高质量单元测试必须遵循的六大原则,结合Mockito的应用场景进行解析: 1. 快速反馈(Fast) 原则…...

前端智能识别解析粘贴板内容
原理分析 说白了就是解析特定格式的文字,并将处理好的内容回填到需要的表单中。 为了程序的健壮性,我们解析时需要考虑多种情况。 1、文字行数 单行和多行的解析可以分开 单行的情况如下面这种, 姓名: 七七 电话:788 邮箱&…...

AI工具发展全景分析与战略展望
AI工具发展全景分析与战略展望 本文基于本人最近整理并开发的AI工具推荐平台软件及相关的资料信息整理。 一、产业现状深度解析 (一)市场格局三维透视 #mermaid-svg-YLeCfJwoWDOd32wZ {font-family:"trebuchet ms",verdana,arial,sans-seri…...

(定时器,绘制事件,qt简单服务器的搭建)2025.2.11
作业 笔记(复习补充) 1> 制作一个闹钟软件 头文件 #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QPushButton> //按钮类 #include <QTimer> //定时器类 #include <QTime> //…...

C++17十大常用特性
玩转cpp小项目星球3周年了! 今天分享两个知识点: C17我常用的十大特性。git am与git apply对patch处理的不同。...

【机器学习】超参数的选择,以kNN算法为例
分类准确度 一、摘要二、超参数的概念三、调参的方法四、实验搜索超参数五、扩展搜索范围六、考虑距离权重的kNN算法七、距离的计算方法及代码实现八、明可夫斯基距离的应用九、网格搜索超参数 一、摘要 本博文讲解了机器学习中的超参数问题,以K近邻算法为例&#…...

【RabbitMQ的监听器容器Simple和Direct】 实现和场景区别
在Spring Boot中,RabbitMQ的两种监听器容器(SimpleMessageListenerContainer和DirectMessageListenerContainer)在实现机制和使用场景上有显著差异。以下是它们的核心区别、配置方式及最佳实践: Simple类型 Direct类型 一、核心…...
)
NO.13十六届蓝桥杯备战|条件操作符|三目操作符|逻辑操作符|!||||(C++)
条件操作符 条件操作符介绍 条件操作符也叫三⽬操作符,需要接受三个操作数的,形式如下: exp1 ? exp2 : exp3条件操作符的计算逻辑是:如果 exp1 为真, exp2 计算, exp2 计算的结果是整个表达式的结果&am…...
2025.1.8(qt图形化界面之消息框)
笔记(后期复习补充) 作业 1> 手动将登录项目实现,不要使用拖拽编程 并且,当点击登录按钮时,后台会判断账号和密码是否相等,如果相等给出登录成功的提示,并且关闭当前界面,发射一…...
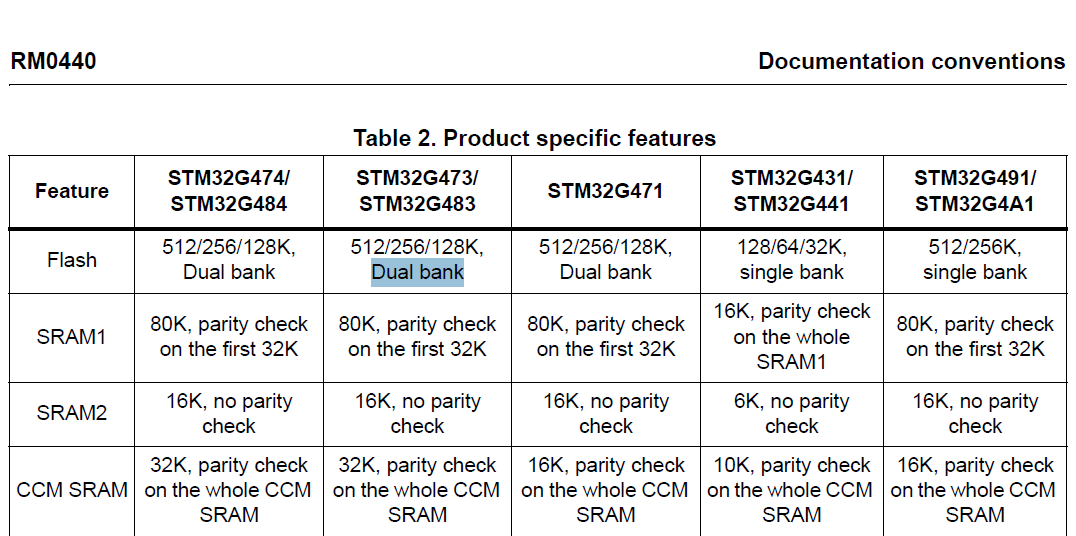
stm32G473的flash模式是单bank还是双bank?
今天突然有人stm32G473的flash模式是单bank还是双bank?由于时间太久,我真忘记了。搜搜发现,还真有人和我一样。见下面的链接:https://shequ.stmicroelectronics.cn/forum.php?modviewthread&tid644563 根据STM32G4系列参考手…...

利用ngx_stream_return_module构建简易 TCP/UDP 响应网关
一、模块概述 ngx_stream_return_module 提供了一个极简的指令: return <value>;在收到客户端连接后,立即将 <value> 写回并关闭连接。<value> 支持内嵌文本和内置变量(如 $time_iso8601、$remote_addr 等)&a…...
Spark 之 入门讲解详细版(1)
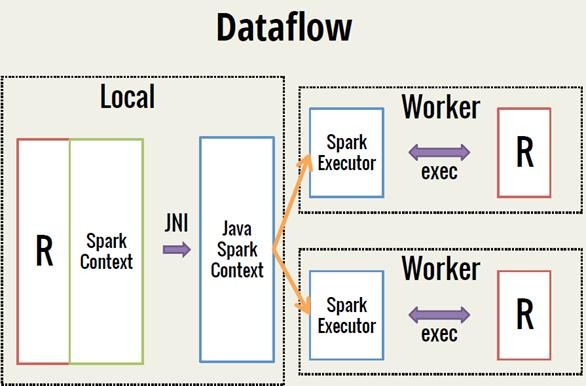
1、简介 1.1 Spark简介 Spark是加州大学伯克利分校AMP实验室(Algorithms, Machines, and People Lab)开发通用内存并行计算框架。Spark在2013年6月进入Apache成为孵化项目,8个月后成为Apache顶级项目,速度之快足见过人之处&…...
)
椭圆曲线密码学(ECC)
一、ECC算法概述 椭圆曲线密码学(Elliptic Curve Cryptography)是基于椭圆曲线数学理论的公钥密码系统,由Neal Koblitz和Victor Miller在1985年独立提出。相比RSA,ECC在相同安全强度下密钥更短(256位ECC ≈ 3072位RSA…...

uni-app学习笔记二十二---使用vite.config.js全局导入常用依赖
在前面的练习中,每个页面需要使用ref,onShow等生命周期钩子函数时都需要像下面这样导入 import {onMounted, ref} from "vue" 如果不想每个页面都导入,需要使用node.js命令npm安装unplugin-auto-import npm install unplugin-au…...

Robots.txt 文件
什么是robots.txt? robots.txt 是一个位于网站根目录下的文本文件(如:https://example.com/robots.txt),它用于指导网络爬虫(如搜索引擎的蜘蛛程序)如何抓取该网站的内容。这个文件遵循 Robots…...
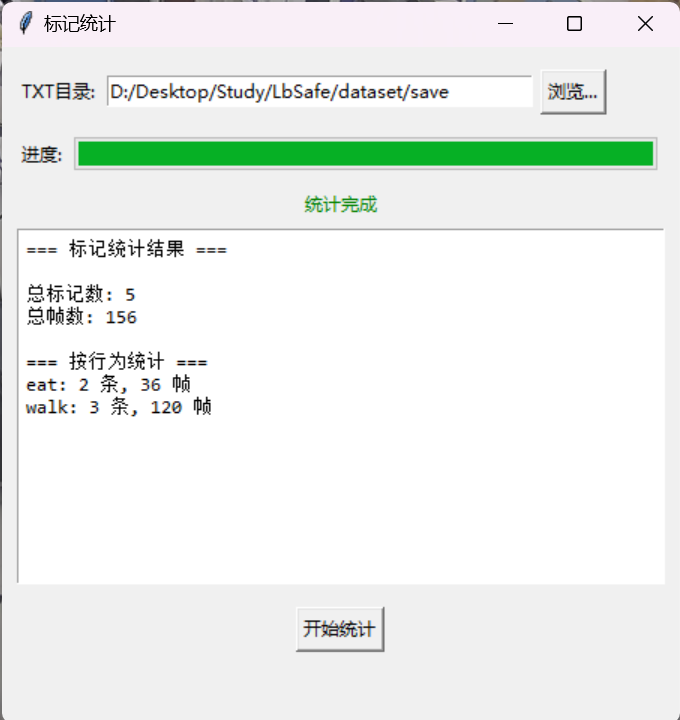
视频行为标注工具BehaviLabel(源码+使用介绍+Windows.Exe版本)
前言: 最近在做行为检测相关的模型,用的是时空图卷积网络(STGCN),但原有kinetic-400数据集数据质量较低,需要进行细粒度的标注,同时粗略搜了下已有开源工具基本都集中于图像分割这块,…...
面向无人机海岸带生态系统监测的语义分割基准数据集
描述:海岸带生态系统的监测是维护生态平衡和可持续发展的重要任务。语义分割技术在遥感影像中的应用为海岸带生态系统的精准监测提供了有效手段。然而,目前该领域仍面临一个挑战,即缺乏公开的专门面向海岸带生态系统的语义分割基准数据集。受…...

C++ 设计模式 《小明的奶茶加料风波》
👨🎓 模式名称:装饰器模式(Decorator Pattern) 👦 小明最近上线了校园奶茶配送功能,业务火爆,大家都在加料: 有的同学要加波霸 🟤,有的要加椰果…...

水泥厂自动化升级利器:Devicenet转Modbus rtu协议转换网关
在水泥厂的生产流程中,工业自动化网关起着至关重要的作用,尤其是JH-DVN-RTU疆鸿智能Devicenet转Modbus rtu协议转换网关,为水泥厂实现高效生产与精准控制提供了有力支持。 水泥厂设备众多,其中不少设备采用Devicenet协议。Devicen…...