【STM32】HAL库Host MSC读写外部U盘及FatFS文件系统的USB Disk模式
【STM32】HAL库Host MSC读写外部U盘及FatFS文件系统的USB Disk模式
在先前 分别介绍了FatFS文件系统和USB虚拟U盘MSC配置
前者通过MCU读写Flash建立文件系统 后者通过MSC连接电脑使其能够被操作
这两者可以合起来 就能够实现同时在MCU、USB中操作Flash的文件系统
【STM32】通过L496的HAL库Flash建立FatFS文件系统(CubeMX自动配置R0.12C版本)
【STM32】HAL库USB虚拟U盘MSC配置及采用自带的Flash作为文件系统
以及Flash+MSC的模式
【STM32】通过HAL库Flash建立FatFS文件系统并配置为USB虚拟U盘MSC
在上面 USB还是工作在Device模式 而不是Host模式 如果配置成Host模式则可以解锁FatFS中的USB Disk功能 实现方式不同 原理、功能也不一样 请勿混淆
另外在Host模式下 MCU作为主机使用 可以读写外部插入进来的USB硬盘系统
在硬件上需要多加一根线 另外FatFS的USB Disk功能需要连上USB以后才能挂载硬盘
其相关配置可以由CubeMX完全生成 用户只需要调用文件操作函数API即可 不需要修改代码
该FatFS模式可以同其他文件系统一起使用 互相独立不冲突(如普通模式User-defined模式)
文章目录
- USB Host MSC
- FatFS USB Disk
- 修改代码
- 测试
- 附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
- SysTick系统定时器精准延时
- 延时函数
- 阻塞延时
- 非阻塞延时
- 位带操作
- 位带代码
- 位带宏定义
- 总线函数
- 一、位带操作理论及实践
- 二、如何判断MCU的外设是否支持位带
USB Host MSC
在Host主机模式下 可以配置主机MSC
USB配置为:

在该模式下 USB的中断被强制打开
MSC配置为:

这里需要多加一根输出引脚作为Host控制引脚

在工程上 导入Host下的.c文件:

另外添加头文件路径:

.\RTE\Device\STM32L496RGTx\STCubeGenerated\Middlewares\ST\STM32_USB_Host_Library\Class\MSC\Inc
.\RTE\Device\STM32L496RGTx\STCubeGenerated\Middlewares\ST\STM32_USB_Host_Library\Core\Inc
并添加src文件

其中 usbh_diskio.c会在配置FatFS后生成
FatFS USB Disk
与其他文件系统配置方式一致
注意支持中文

在MAX_SS中 可以根据实际 填入可以支持的硬盘分配单元大小(最大为4096 所以如果硬盘只支持4096 那么这一项必须要为最大 如果硬盘最小超过4096 则MCU无法支持)
同样导入FatFS相关.c文件

以及fatfs.c和usbh_diskio.c

修改代码
在usbh_diskio.c中 生成的代码已经完成了文件系统的底层 所以不用我们去修改了
我们需要建立自己的文件操作API函数
如下:
#include "file_operate.h"
#include <string.h>//定义用于格式化的工作区缓存
BYTE work[_MAX_SS];
#define USERFile USBHFile
#define USERFatFS USBHFatFS
#define USERPath USBHPath
#define retUSER retUSBHvoid SDFileTestWrite(void)
{FRESULT res_sd;UINT fnum;/* 文件成功读写数量 */char string[100];signed int ByteNum = 0;memset(string,0,sizeof(string));sprintf(string,"%s%s.xls",USERPath,"Test");res_sd = f_open(&USERFile, string,FA_CREATE_ALWAYS | FA_WRITE );if(res_sd != FR_OK){printf("[FILE] Failed to create file! %d\r\n",res_sd);}sprintf(string,"Vreal\tA1\tA2\n");ByteNum = strlen(string);res_sd=f_write(&USERFile,string,ByteNum,&fnum);res_sd = f_close(&USERFile);if(res_sd != FR_OK){printf("[FILE] Error:File closure Exception!\r\n");}else{printf("[FILE] SDFileTestWrite ok!\r\n");}
}void SDFileTestRead(void)
{FRESULT res_sd;char string[100];uint32_t line = 0;memset(string,0,sizeof(string));sprintf(string,"%s%s.xls",USERPath,"Test");res_sd = f_open(&USERFile, string, FA_OPEN_EXISTING | FA_READ);if(res_sd != FR_OK){goto LoadFail;}line = 0;while(!(f_eof(&USERFile))){memset(string,0,sizeof(string));f_gets(string,sizeof(string),&USERFile);if(strlen(string) == 0){break;}++line;printf("[FILE] line:%d %s\r\n",line,string);//sscanf(string,"%f\t%f\t%f\n",&Vreal[*pNum],&Va1[*pNum],&Va2[*pNum]);//按格式提取字符串函数}res_sd = f_close(&USERFile);if(res_sd != FR_OK){printf("[FILE] Error:Load File closure Exception!\r\n");}printf("[FILE] SDFileTestRead ok\r\n");return;LoadFail:{printf("[FILE] Load Fail:%s\r\n",string);}
}
/*挂载FatFs文件系统*/
void FatFS_Init(void)
{ retUSER = f_mount(&USERFatFS,USERPath,1);//挂载盘符Aif(retUSER == FR_NO_FILESYSTEM)//没有文件系统就格式化创建创建文件系统{retUSER = f_mkfs(USERPath,FM_FAT,2048,work,sizeof(work));if(retUSER == FR_OK){retUSER = f_mount(&USERFatFS,USERPath,1);//挂载printf("[FatFS] 格式化成功retUSER=%d\r\n",retUSER);}else{printf("[FatFS] 格式化失败retUSER=%d\r\n",retUSER);return;}//格式化失败}else if(retUSER == FR_OK){printf("[FatFS] 挂载成功retUSER=%d\r\n",retUSER);}else{printf("[FatFS] 挂载失败retUSER=%d\r\n",retUSER);return;}//挂载失败SDFileTestWrite();SDFileTestRead();FatFs_GetDiskInfo();FatFs_ScanDir(USERPath);
}/*获取磁盘信息并在LCD上显示*/
void FatFs_GetDiskInfo(void)
{FATFS *fs;//定义剩余簇个数变量DWORD fre_clust; //获取剩余簇个数FRESULT res = f_getfree("0:", &fre_clust, &fs); //获取失败if(res != FR_OK){printf("f_getfree() error\r\n");return;}printf("\r\n*** FAT disk info ***\r\n");//总的扇区个数DWORD tot_sect = (fs->n_fatent - 2) * fs->csize; //剩余的扇区个数 = 剩余簇个数 * 每个簇的扇区个数DWORD fre_sect = fre_clust * fs->csize; //对于SD卡和U盘, _MIN_SS=512字节
#if _MAX_SS == _MIN_SS //SD卡的_MIN_SS固定为512,右移11位相当于除以2048//剩余空间大小,单位:MB,用于SD卡,U盘DWORD freespace= (fre_sect>>11); //总空间大小,单位:MB,用于SD卡,U盘 DWORD totalSpace= (tot_sect>>11);
#else//Flash存储器,小容量//剩余空间大小,单位:KBDWORD freespace= (fre_sect*fs->ssize)>>10; //总空间大小,单位:KBDWORD totalSpace= (tot_sect*fs->ssize)>>10;
#endif//FAT类型printf("FAT type = %d\r\n",fs->fs_type);printf("[1=FAT12,2=FAT16,3=FAT32,4=exFAT]\r\n");//扇区大小,单位字节printf("Sector size(bytes) = ");//SD卡固定512字节
#if _MAX_SS == _MIN_SS printf("%d\r\n", _MIN_SS);
#else//FLASH存储器printf("%d\r\n", fs->ssize);
#endifprintf("Cluster size(sectors) = %d\r\n", fs->csize);printf("Total cluster count = %ld\r\n", fs->n_fatent-2);printf("Total sector count = %ld\r\n", tot_sect);//总空间
#if _MAX_SS == _MIN_SS printf("Total space(MB) = %ld\r\n", totalSpace);
#elseprintf("Total space(KB) = %ld\r\n", totalSpace);
#endif//空闲簇数量printf("Free cluster count = %ld\r\n",fre_clust);//空闲扇区数量printf("Free sector count = %ld\r\n", fre_sect);//空闲空间
#if _MAX_SS == _MIN_SS printf("Free space(MB) = %ld\r\n", freespace);
#elseprintf("Free space(KB) = %ld\r\n", freespace);
#endifprintf("Get FAT disk info OK\r\n");
}/*创建文本文件*/
void FatFs_WriteTXTFile(TCHAR *filename,uint16_t year, uint8_t month, uint8_t day)
{FIL file;printf("\r\n*** Creating TXT file: %s ***\r\n", filename);FRESULT res = f_open(&file, filename, FA_CREATE_ALWAYS | FA_WRITE);//打开/创建文件成功if(res == FR_OK){//字符串必须有换行符"\n"TCHAR str[]="Line1: Hello, FatFs***\n"; //不会写入结束符"\0"f_puts(str, &file); printf("Write file OK: %s\r\n", filename);}else{printf("Open file error,error code: %d\r\n", res);}//使用完毕关闭文件f_close(&file);
}/*读取一个文本文件的内容*/
void FatFs_ReadTXTFile(TCHAR *filename)
{printf("\r\n*** Reading TXT file: %s ***\r\n", filename);FIL file;//以只读方式打开文件FRESULT res = f_open(&file, filename, FA_READ); //打开成功if(res == FR_OK){//读取缓存TCHAR str[100];//没有读到文件内容末尾while(!f_eof(&file)){//读取1个字符串,自动加上结束符”\0”f_gets(str,100, &file); printf("%s", str);}printf("\r\n");}//如果没有该文件else if(res == FR_NO_FILE)printf("File does not exist\r\n");//打开失败elseprintf("f_open() error,error code: %d\r\n", res);//关闭文件f_close(&file);
}/*扫描和显示指定目录下的文件和目录*/
void FatFs_ScanDir(const TCHAR* PathName)
{DIR dir; //目录对象FILINFO fno; //文件信息//打开目录FRESULT res = f_opendir(&dir, PathName);//打开失败if(res != FR_OK){//关闭目录,直接退出函数f_closedir(&dir);printf("\r\nf_opendir() error,error code: %d\r\n", res);return;}printf("\r\n*** All entries in dir: %s ***\r\n", PathName);//顺序读取目录中的文件while(1){//读取目录下的一个项res = f_readdir(&dir, &fno); //文件名为空表示没有多的项可读了if(res != FR_OK || fno.fname[0] == 0)break; //如果是一个目录if(fno.fattrib & AM_DIR) {printf("DIR: %s\r\n", fno.fname);}//如果是一个文件else {printf("FILE: %s\r\n",fno.fname);}}//扫描完毕,关闭目录printf("Scan dir OK\r\n");f_closedir(&dir);
}/*获取一个文件的文件信息*/
void FatFs_GetFileInfo(TCHAR *filename)
{printf("\r\n*** File info of: %s ***\r\n", filename);FILINFO fno;//检查文件或子目录是否存在FRESULT fr = f_stat(filename, &fno);//如果存在从fno中读取文件信息if(fr == FR_OK){printf("File size(bytes) = %ld\r\n", fno.fsize);printf("File attribute = 0x%x\r\n", fno.fattrib);printf("File Name = %s\r\n", fno.fname);//输出创建/修改文件时的时间戳FatFs_PrintfFileDate(fno.fdate, fno.ftime);}//如果没有该文件else if (fr == FR_NO_FILE)printf("File does not exist\r\n");//发生其他错误elseprintf("f_stat() error,error code: %d\r\n", fr);
}/*删除文件*/
void FatFs_DeleteFile(TCHAR *filename)
{printf("\r\n*** Delete File: %s ***\r\n", filename);FIL file;//打开文件FRESULT res = f_open(&file, filename, FA_OPEN_EXISTING); if(res == FR_OK){//关闭文件f_close(&file);printf("open successfully!\r\n");}//删除文件res = f_unlink(filename);//删除成功if(res == FR_OK){printf("The file was deleted successfully!\r\n");}//删除失败else{printf("File deletion failed, error code:%d\r\n", res);}
}/*打印输出文件日期*/
void FatFs_PrintfFileDate(WORD date, WORD time)
{printf("File data = %d/%d/%d\r\n", ((date>>9)&0x7F)+1980, (date>>5)&0xF, date&0x1F);printf("File time = %d:%d:%d\r\n", (time>>11)&0x1F, (time>>5)&0x3F, time&0x1F);
}实际上就是将之前的文件系统介绍的操作函数中的变量给替换了
替换的变量在fatfs.c中可以找到
uint8_t retUSBH; /* Return value for USBH */
char USBHPath[4]; /* USBH logical drive path */
FATFS USBHFatFS; /* File system object for USBH logical drive */
FIL USBHFile; /* File object for USBH */#define USERFile USBHFile
#define USERFatFS USBHFatFS
#define USERPath USBHPath
#define retUSER retUSBH
注意 工作区和堆栈也要与其对应 相应增大 格式化的f_mkfs函数参数也要改变
另外 在USB设备插入之前 会循环调用MX_USB_HOST_Process函数
以轮询USB设备状态

声明外部变量Appli_state以随时可以读取状态
(具体在哪定义都可 只要全局包含就行)
extern ApplicationTypeDef Appli_state;
在主循环中可以改成这样:
while (1){/* USER CODE END WHILE */MX_USB_HOST_Process();/* USER CODE BEGIN 3 */if (Appli_state == APPLICATION_READY){break;}}FatFS_Init();while (1){}
即轮询USB Disk连接成功后 执行FatFS初始化函数 即挂载、格式化、测试等等
测试
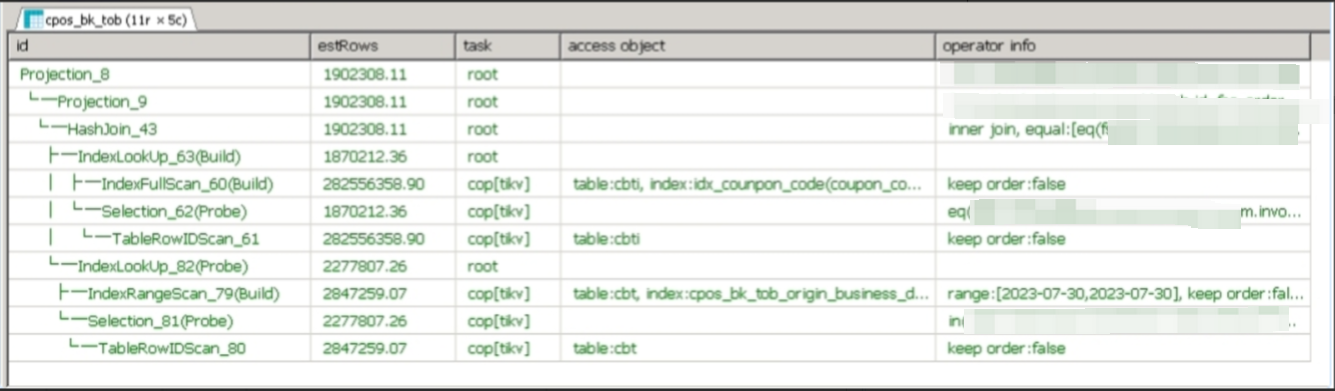
轮询USB Disk连接成功后:

硬盘信息:

文件内容:

附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
SysTick系统定时器精准延时
延时函数
SysTick->LOAD中的值为计数值
计算方法为工作频率值/分频值
比如工作频率/1000 则周期为1ms
以ADuCM4050为例:
#include "ADuCM4050.h"void delay_ms(unsigned int ms)
{SysTick->LOAD = 26000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器while(ms--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 26000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器while(us--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}其中的52000000表示芯片的系统定时器频率 32系列一般为外部定时器频率的两倍
Cortex-M架构SysTick系统定时器阻塞和非阻塞延时
阻塞延时
首先是最常用的阻塞延时
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while(ms--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while(us--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
50000000表示工作频率
分频后即可得到不同的延时时间
以此类推
那么 不用两个嵌套while循环 也可以写成:
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
但是这种写法有个弊端
那就是输入ms后,最大定时不得超过计数值,也就是不能超过LOAD的最大值,否则溢出以后,则无法正常工作
而LOAD如果最大是32位 也就是4294967295
晶振为50M的话 50M的计数值为1s 4294967295计数值约为85s
固最大定时时间为85s
但用嵌套while的话 最大可以支持定时4294967295*85s
非阻塞延时
如果采用非阻塞的话 直接改写第二种方法就好了:
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
将等待和关闭定时器语句去掉
在使用时加上判断即可变为阻塞:
delay_ms(500);
while ((SysTick->CTRL & 0x00010000)==0);
SysTick->CTRL = 0;
在非阻塞状态下 可以提交定时器后 去做别的事情 然后再来等待
不过这样又有一个弊端 那就是定时器会自动重载 可能做别的事情以后 定时器跑过了 然后就要等85s才能停下
故可以通过内部定时器来进行非阻塞延时函数的编写
基本上每个mcu的内部定时器都可以配置自动重载等功能 网上资料很多 这里就不再阐述了
位带操作
位带代码
M3、M4架构的单片机 其输出口地址为端口地址+20 输入为+16
M0架构的单片机 其输出口地址为端口地址+12 输入为+8
以ADuCM4050为列:
位带宏定义
#ifndef __GPIO_H__
#define __GPIO_H__
#include "ADuCM4050.h"
#include "adi_gpio.h"#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))#define GPIO0_ODR_Addr (ADI_GPIO0_BASE+20) //0x40020014
#define GPIO0_IDR_Addr (ADI_GPIO0_BASE+16) //0x40020010#define GPIO1_ODR_Addr (ADI_GPIO1_BASE+20) //0x40020054
#define GPIO1_IDR_Addr (ADI_GPIO1_BASE+16) //0x40020050#define GPIO2_ODR_Addr (ADI_GPIO2_BASE+20) //0x40020094
#define GPIO2_IDR_Addr (ADI_GPIO2_BASE+16) //0x40020090#define GPIO3_ODR_Addr (ADI_GPIO3_BASE+20) //0x400200D4
#define GPIO3_IDR_Addr (ADI_GPIO3_BASE+16) //0x400200D0#define P0_O(n) BIT_ADDR(GPIO0_ODR_Addr,n) //输出
#define P0_I(n) BIT_ADDR(GPIO0_IDR_Addr,n) //输入 #define P1_O(n) BIT_ADDR(GPIO1_ODR_Addr,n) //输出
#define P1_I(n) BIT_ADDR(GPIO1_IDR_Addr,n) //输入 #define P2_O(n) BIT_ADDR(GPIO2_ODR_Addr,n) //输出
#define P2_I(n) BIT_ADDR(GPIO2_IDR_Addr,n) //输入 #define P3_O(n) BIT_ADDR(GPIO3_ODR_Addr,n) //输出
#define P3_I(n) BIT_ADDR(GPIO3_IDR_Addr,n) //输入 #define Port0 (ADI_GPIO_PORT0)
#define Port1 (ADI_GPIO_PORT1)
#define Port2 (ADI_GPIO_PORT2)
#define Port3 (ADI_GPIO_PORT3)#define Pin0 (ADI_GPIO_PIN_0)
#define Pin1 (ADI_GPIO_PIN_1)
#define Pin2 (ADI_GPIO_PIN_2)
#define Pin3 (ADI_GPIO_PIN_3)
#define Pin4 (ADI_GPIO_PIN_4)
#define Pin5 (ADI_GPIO_PIN_5)
#define Pin6 (ADI_GPIO_PIN_6)
#define Pin7 (ADI_GPIO_PIN_7)
#define Pin8 (ADI_GPIO_PIN_8)
#define Pin9 (ADI_GPIO_PIN_9)
#define Pin10 (ADI_GPIO_PIN_10)
#define Pin11 (ADI_GPIO_PIN_11)
#define Pin12 (ADI_GPIO_PIN_12)
#define Pin13 (ADI_GPIO_PIN_13)
#define Pin14 (ADI_GPIO_PIN_14)
#define Pin15 (ADI_GPIO_PIN_15)void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag);
void GPIO_BUS_OUT(unsigned int port,unsigned int num);void P0_BUS_O(unsigned int num);
unsigned int P0_BUS_I(void);void P1_BUS_O(unsigned int num);
unsigned int P1_BUS_I(void);void P2_BUS_O(unsigned int num);
unsigned int P2_BUS_I(void);void P3_BUS_O(unsigned int num);
unsigned int P3_BUS_I(void);#endif总线函数
#include "ADuCM4050.h"
#include "adi_gpio.h"
#include "GPIO.h"void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag)
{switch(port){case 0:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 1:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 2:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 3:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;default:port=0;break;}
}void GPIO_BUS_OUT(unsigned int port,unsigned int num) //num最大为0xffff
{int i;for(i=0;i<16;i++){GPIO_OUT(port,i,(num>>i)&0x0001);}
}void P0_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P0_O(i)=(num>>i)&0x0001;}
}
unsigned int P0_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P0_I(i)<<i)&0xFFFF;}return num;
}void P1_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P1_O(i)=(num>>i)&0x0001;}
}
unsigned int P1_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P1_I(i)<<i)&0xFFFF;}return num;
}void P2_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P2_O(i)=(num>>i)&0x0001;}
}
unsigned int P2_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P2_I(i)<<i)&0xFFFF;}return num;
}void P3_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P3_O(i)=(num>>i)&0x0001;}
}
unsigned int P3_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P3_I(i)<<i)&0xFFFF;}return num;
}一、位带操作理论及实践
位带操作的概念其实30年前就有了,那还是 CM3 将此能力进化,这里的位带操作是 8051 位寻址区的威力大幅加强版
位带区: 支持位带操作的地址区
位带别名: 对别名地址的访问最终作 用到位带区的访问上(注意:这中途有一个 地址映射过程)
位带操作对于硬件 I/O 密集型的底层程序最有用处
支持了位带操作后,可以使用普通的加载/存储指令来对单一的比特进行读写。在CM4中,有两个区中实现了位带。其中一个是SRAM区的最低1MB范围,第二个则是片内外设区的最低1MB范围。这两个区中的地址除了可以像普通的RAM一样使用外,它们还都有自己的“位带别名区”,位带别名区把每个比特膨胀成一个32位的字。当你通过位带别名区访问这些字时,就可以达到访问原始比特的目的。
位操作就是可以单独的对一个比特位读和写,类似与51中sbit定义的变量,stm32中通过访问位带别名区来实现位操作的功能
STM32中有两个地方实现了位带,一个是SRAM,一个是片上外设。

(1)位带本质上是一块地址区(例如每一位地址位对应一个寄存器)映射到另一片地址区(实现每一位地址位对应一个寄存器中的一位),该区域就叫做位带别名区,将每一位膨胀成一个32位的字。
(2)位带区的4个字节对应实际寄存器或内存区的一个位,虽然变大到4个字节,但实际上只有最低位有效(代表0或1)
只有位带可以直接用=赋值的方式来操作寄存器 位带是把寄存器上的每一位 膨胀到32位 映射到位带区 比如0x4002 0000地址的第0个bit 映射到位带区的0地址 那么其对应的位带映射地址为0x00 - 0x04 一共32位 但只有LSB有效 采用位带的方式用=赋值时 就是把位带区对应的LSB赋值 然后MCU再转到寄存器对应的位里面 寄存器操作时 如果不改变其他位上面的值 那就只能通过&=或者|=的方式进行

要设置0x2000 0000这个字节的第二个位bit2为1,使用位带操作的步骤有:
1、将1写入位 带别名区对应的映射地址(即0x22000008,因为1bit对应4个byte);
2、将0x2000 0000的值 读取到内部的缓冲区(这一步骤是内核完成的,属于原子操作,不需要用户操作);
3、将bit2置1,再把值写 回到0x2000 0000(属于原子操作,不需要用户操作)。
关于GPIO引脚对应的访问地址,可以参考以下公式
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
如:端口F访问的起始地址GPIOF_BASE
#define GPIOF ((GPIO_TypeDef *)GPIOF_BASE)

但好在官方库里面都帮我们定义好了 只需要在BASE地址加上便宜即可
例如:
GPIOF的ODR寄存器的地址 = GPIOF_BASE + 0x14
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
设置PF9引脚的话:
uint32_t *PF9_BitBand =
*(uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR– 0x40000000) *32 + 9*4)封装一下:
#define PFout(x) *(volatile uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR – 0x40000000) *32 + x*4)现在 可以把通用部分封装成一个小定义:
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
那么 设置PF引脚的函数可以定义:
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410 #define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
若使PF9输入输出则:
PF_O(9)=1; //输出高电平
uint8_t dat = PF_I(9); //获取PF9引脚的值
总线输入输出:
void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PF_O(i)=(num>>i)&0x0001;}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PF_I(i)<<i)&0xFFFF;}return num;
}
STM32的可用下面的函数:
#ifndef __GPIO_H__
#define __GPIO_H__
#include "stm32l496xx.h"#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014 #define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010 #define PA_O(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PA_I(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入 #define PB_O(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PB_I(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入 #define PC_O(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PC_I(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入 #define PD_O(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PD_I(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入 #define PE_O(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PE_I(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入#define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入#define PG_O(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PG_I(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入#define PH_O(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PH_I(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入#define PI_O(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PI_I(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入void PA_BUS_O(unsigned int num);
unsigned int PA_BUS_I(void);void PB_BUS_O(unsigned int num);
unsigned int PB_BUS_I(void);void PC_BUS_O(unsigned int num);
unsigned int PC_BUS_I(void);void PD_BUS_O(unsigned int num);
unsigned int PD_BUS_I(void);void PE_BUS_O(unsigned int num);
unsigned int PE_BUS_I(void);void PF_BUS_O(unsigned int num);
unsigned int PF_BUS_I(void);void PG_BUS_O(unsigned int num);
unsigned int PG_BUS_I(void);void PH_BUS_O(unsigned int num);
unsigned int PH_BUS_I(void);void PI_BUS_O(unsigned int num);
unsigned int PI_BUS_I(void);#endif#include "GPIO.h"void PA_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PA_O(i)=(num>>i)&0x0001;}
}
unsigned int PA_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PA_I(i)<<i)&0xFFFF;}return num;
}void PB_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PB_O(i)=(num>>i)&0x0001;}
}
unsigned int PB_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PB_I(i)<<i)&0xFFFF;}return num;
}void PC_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PC_O(i)=(num>>i)&0x0001;}
}
unsigned int PC_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PC_I(i)<<i)&0xFFFF;}return num;
}void PD_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PD_O(i)=(num>>i)&0x0001;}
}
unsigned int PD_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PD_I(i)<<i)&0xFFFF;}return num;
}void PE_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PE_O(i)=(num>>i)&0x0001;}
}
unsigned int PE_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PE_I(i)<<i)&0xFFFF;}return num;
}void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PF_O(i)=(num>>i)&0x0001;}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PF_I(i)<<i)&0xFFFF;}return num;
}void PG_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PG_O(i)=(num>>i)&0x0001;}
}
unsigned int PG_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PG_I(i)<<i)&0xFFFF;}return num;
}void PH_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PH_O(i)=(num>>i)&0x0001;}
}
unsigned int PH_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PH_I(i)<<i)&0xFFFF;}return num;
}void PI_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PI_O(i)=(num>>i)&0x0001;}
}
unsigned int PI_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PI_I(i)<<i)&0xFFFF;}return num;
}二、如何判断MCU的外设是否支持位带
根据《ARM Cortex-M3与Cortex-M4权威指南(第3版)》中第6章第7节描述

也就是说 要实现对GPIO的位带操作 必须保证GPIO位于外设区域的第一个1MB中
第一个1MB应该是0x4010 0000之前 位带不是直接操作地址 而是操作地址映射 地址映射被操作以后 MCU自动会修改对应寄存器的值
位带区只有1MB 所以只能改0x4000 0000 - 0x400F FFFF的寄存器
像F4系列 GPIO的首地址为0x4002 0000 就可以用位带来更改
STM32L476的GPIO就不行:

AHB2的都不能用位带
ABP 还有AHB1都可以用

但是L476的寄存器里面 GPIO和ADC都是AHB2
相关文章:
【STM32】HAL库Host MSC读写外部U盘及FatFS文件系统的USB Disk模式
【STM32】HAL库Host MSC读写外部U盘及FatFS文件系统的USB Disk模式 在先前 分别介绍了FatFS文件系统和USB虚拟U盘MSC配置 前者通过MCU读写Flash建立文件系统 后者通过MSC连接电脑使其能够被操作 这两者可以合起来 就能够实现同时在MCU、USB中操作Flash的文件系统 【STM32】通过…...

docker nginx 配置文件详解
在平常的开发工作中,我们经常需要访问静态资源(图片、HTML页面等)、访问文件目录、部署项目时进行负载均衡等。那么我们就会使用到Nginx,nginx.conf 的配置至关重要。那么今天主要结合访问静态资源、负载均衡等总结下 nginx.conf …...

如何实现华为云+deepseek?
在华为云上实现跨账号迁移数据或部署DeepSeek模型,可以通过以下步骤完成: 跨账号数据迁移 创建委托:在源账号中创建一个委托(Agency),授予目标账号访问数据的权限。 复制镜像:在源账号中&…...

【学习笔记】计算机网络(三)
第3章 数据链路层 文章目录 第3章 数据链路层3.1数据链路层的几个共同问题3.1.1 数据链路和帧3.1.2 三个基本功能3.1.3 其他功能 - 滑动窗口机制 3.2 点对点协议PPP(Point-to-Point Protocol)3.2.1 PPP 协议的特点3.2.2 PPP协议的帧格式3.2.3 PPP 协议的工作状态 3.3 使用广播信…...

稀土抑烟剂——为汽车火灾安全增添防线
一、稀土抑烟剂的基本概念 稀土抑烟剂是一类基于稀土元素(如稀土氧化物和稀土金属化合物)开发的高效阻燃材料。它可以显著提高汽车内饰材料的阻燃性能,减少火灾发生时有毒气体和烟雾的产生。稀土抑烟剂不仅能提升火灾时的安全性,…...

Qt Pro、Pri、Prf
一、概述 1、在Qt中,通常使用.pro(project)、pri(private include)、prf(project file)三种文件扩展名来组织项目。对于模块化编程,Qt提供了Pro和Pri,Pro管理项目,Pri管理模块。 2、pro文件是Qt项目的核心文件,包含了…...

基于AIOHTTP、Websocket和Vue3一步步实现web部署平台,无延迟控制台输出,接近原生SSH连接
背景:笔者是一名Javaer,但是最近因为某些原因迷上了Python和它的Asyncio,至于什么原因?请往下看。在着迷”犯浑“的过程中,也接触到了一些高并发高性能的组件,通过简单的学习和了解,aiohttp这个…...

如何在MacOS上查看edge/chrome的扩展源码
步骤 进入管理扩展页面点击详细信息复制对应id在命令行键入 open ~/Library/Application Support/Microsoft Edge/Default/Extensions/${你刚刚复制的id} 即可打开访达中对应的更目录 注意 由于原生命令行无法直接处理空格 ,所以需要加转义符\,即:open ~/Librar…...
)
【xdoj-离散线上练习H】T234(C++)
解题心得: 写递归函数的时候,首先写终止条件,这有助于对整个递归函数的把握。 题目:输入集合A和B,输出A到B上的所有函数。 问题描述 给定非空数字集合A和B,求出集合A到集合B上的所有函数。 输入格式 第一行…...

Docker Desktop Windows 安装
一、先下载Docker desktop WIndows 下载地址 二、安装 安装超简单 一路 下一步 三、安装之后,桌面会出现一个 小蓝鲸图标,打开它 》更新至最新版本,不然小蓝鲸打开,一会就退出了。 》wsl --update (这个有时比较慢…...

springCloud-2021.0.9 之 GateWay 示例
文章目录 前言springCloud-2021.0.9 之 GateWay 示例1. GateWay 官网2. GateWay 三个关键名称3. GateWay 工作原理的高级概述4. 示例4.1. POM4.2. 启动类4.3. 过滤器4.4. 配置 5. 启动/测试 前言 如果您觉得有用的话,记得给博主点个赞,评论,收…...

JDK8 stream API用法汇总
目录 1.集合处理数据的弊端 2. Steam流式思想概述 3. Stream流的获取方式 3.1 根据Collection获取 3.1 通过Stream的of方法 4.Stream常用方法介绍 4.1 forEach 4.2 count 4.3 filter 4.4 limit 4.5 skip 4.6 map 4.7 sorted 4.8 distinct 4.9 match 4.10 find …...

windows生成SSL的PFX格式证书
生成crt证书: 安装openssl winget install -e --id FireDaemon.OpenSSL 生成cert openssl req -x509 -newkey rsa:2048 -keyout private.key -out certificate.crt -days 365 -nodes -subj "/CN=localhost" 转换pfx openssl pkcs12 -export -out certificate.pfx…...

玩转大语言模型——使用Kiln AI可视化环境进行大语言模型微调数据合成
系列文章目录 玩转大语言模型——使用langchain和Ollama本地部署大语言模型 玩转大语言模型——三分钟教你用langchain提示词工程获得猫娘女友 玩转大语言模型——ollama导入huggingface下载的模型 玩转大语言模型——langchain调用ollama视觉多模态语言模型 玩转大语言模型—…...

2025 西湖论剑wp
web Rank-l 打开题目环境: 发现一个输入框,看一下他是用上面语言写的 发现是python,很容易想到ssti 密码随便输,发现没有回显 但是输入其他字符会报错 确定为ssti注入 开始构造payload, {{(lipsum|attr(‘global…...

FPGA 28 ,基于 Vivado Verilog 的呼吸灯效果设计与实现( 使用 Vivado Verilog 实现呼吸灯效果 )
目录 前言 一. 设计流程 1.1 需求分析 1.2 方案设计 1.3 PWM解析 二. 实现流程 2.1 确定时间单位和精度 2.2 定义参数和寄存器 2.3 实现计数器逻辑 2.4 控制 LED 状态 三. 整体流程 3.1 全部代码 3.2 代码逻辑 1. 参数定义 2. 分级计数 3. 状态切换 4. LED 输…...

单片机简介
一、单片机简介 电脑和单片机性能对比 二、单片机发展历程 三、CISC VS RISC...

C++ 设计模式-桥接模式
C桥接模式的经典示例,包含测试代码: #include <iostream> #include <string>// 实现化接口 class Device { public:virtual ~Device() default;virtual bool isEnabled() const 0;virtual void enable() 0;virtual void disable() 0;vi…...

不小心删除服务[null]后,git bash出现错误
不小心删除服务[null]后,git bash出现错误,如何解决? 错误描述:打开 git bash、msys2都会出现错误「bash: /dev/null: No such device or address」 问题定位: 1.使用搜索引擎搜索「bash: /dev/null: No such device o…...

16.React学习笔记.React更新机制
一. 发生更新的时机以及顺序## image.png props/state改变render函数重新执行产生新的VDOM树新旧DOM树进行diff计算出差异进行更新更新到真实的DOM 二. React更新流程## React将最好的O(n^3)的tree比较算法优化为O(n)。 同层节点之间相互比较,不跨节点。不同类型的节…...

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理: 原因: IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…...

[特殊字符] 智能合约中的数据是如何在区块链中保持一致的?
🧠 智能合约中的数据是如何在区块链中保持一致的? 为什么所有区块链节点都能得出相同结果?合约调用这么复杂,状态真能保持一致吗?本篇带你从底层视角理解“状态一致性”的真相。 一、智能合约的数据存储在哪里…...
。】2022-5-15)
【根据当天日期输出明天的日期(需对闰年做判定)。】2022-5-15
缘由根据当天日期输出明天的日期(需对闰年做判定)。日期类型结构体如下: struct data{ int year; int month; int day;};-编程语言-CSDN问答 struct mdata{ int year; int month; int day; }mdata; int 天数(int year, int month) {switch (month){case 1: case 3:…...

在鸿蒙HarmonyOS 5中实现抖音风格的点赞功能
下面我将详细介绍如何使用HarmonyOS SDK在HarmonyOS 5中实现类似抖音的点赞功能,包括动画效果、数据同步和交互优化。 1. 基础点赞功能实现 1.1 创建数据模型 // VideoModel.ets export class VideoModel {id: string "";title: string ""…...
【入坑系列】TiDB 强制索引在不同库下不生效问题
文章目录 背景SQL 优化情况线上SQL运行情况分析怀疑1:执行计划绑定问题?尝试:SHOW WARNINGS 查看警告探索 TiDB 的 USE_INDEX 写法Hint 不生效问题排查解决参考背景 项目中使用 TiDB 数据库,并对 SQL 进行优化了,添加了强制索引。 UAT 环境已经生效,但 PROD 环境强制索…...

QMC5883L的驱动
简介 本篇文章的代码已经上传到了github上面,开源代码 作为一个电子罗盘模块,我们可以通过I2C从中获取偏航角yaw,相对于六轴陀螺仪的yaw,qmc5883l几乎不会零飘并且成本较低。 参考资料 QMC5883L磁场传感器驱动 QMC5883L磁力计…...
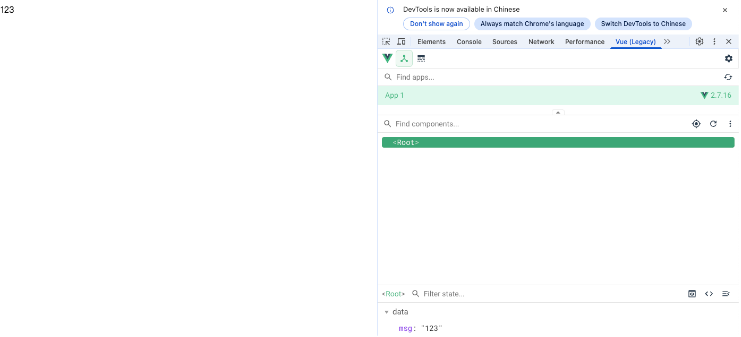
Vue2 第一节_Vue2上手_插值表达式{{}}_访问数据和修改数据_Vue开发者工具
文章目录 1.Vue2上手-如何创建一个Vue实例,进行初始化渲染2. 插值表达式{{}}3. 访问数据和修改数据4. vue响应式5. Vue开发者工具--方便调试 1.Vue2上手-如何创建一个Vue实例,进行初始化渲染 准备容器引包创建Vue实例 new Vue()指定配置项 ->渲染数据 准备一个容器,例如: …...
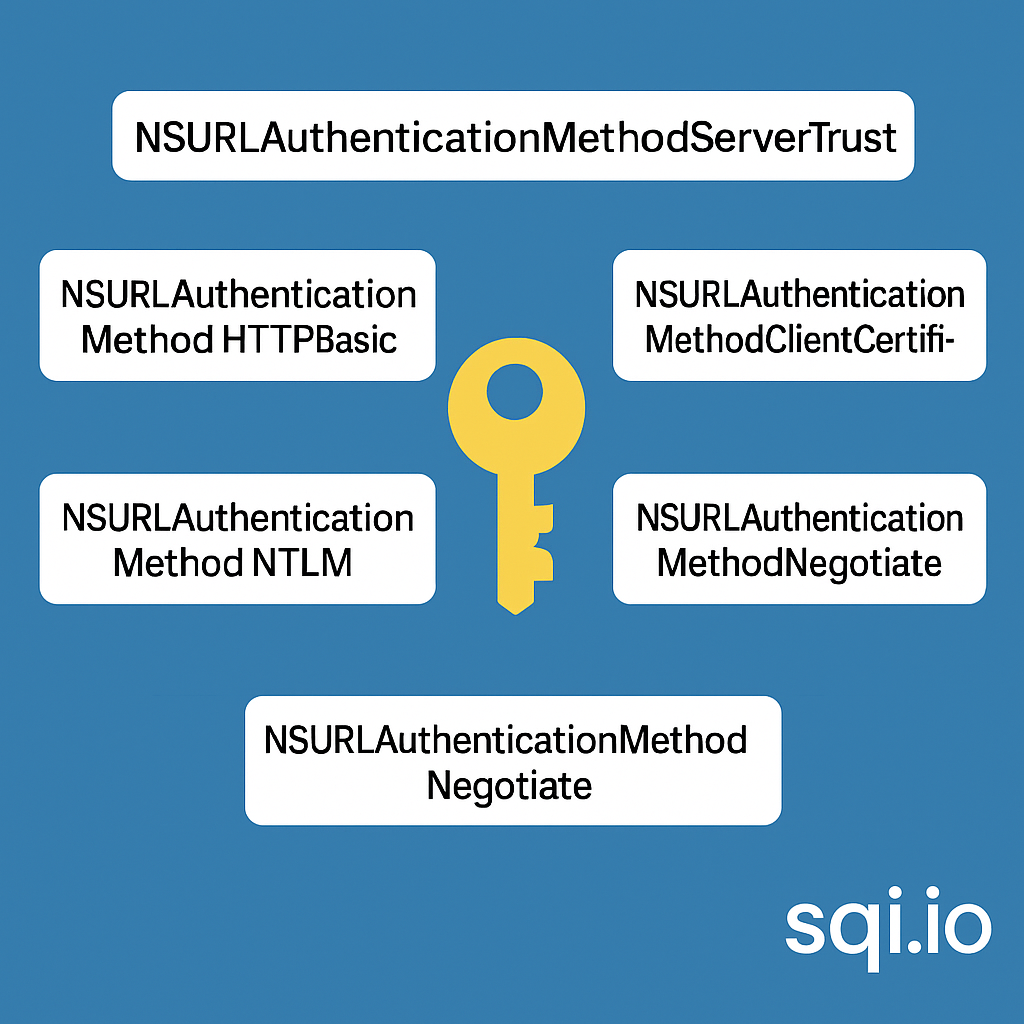
ServerTrust 并非唯一
NSURLAuthenticationMethodServerTrust 只是 authenticationMethod 的冰山一角 要理解 NSURLAuthenticationMethodServerTrust, 首先要明白它只是 authenticationMethod 的选项之一, 并非唯一 1 先厘清概念 点说明authenticationMethodURLAuthenticationChallenge.protectionS…...

论文浅尝 | 基于判别指令微调生成式大语言模型的知识图谱补全方法(ISWC2024)
笔记整理:刘治强,浙江大学硕士生,研究方向为知识图谱表示学习,大语言模型 论文链接:http://arxiv.org/abs/2407.16127 发表会议:ISWC 2024 1. 动机 传统的知识图谱补全(KGC)模型通过…...

C# SqlSugar:依赖注入与仓储模式实践
C# SqlSugar:依赖注入与仓储模式实践 在 C# 的应用开发中,数据库操作是必不可少的环节。为了让数据访问层更加简洁、高效且易于维护,许多开发者会选择成熟的 ORM(对象关系映射)框架,SqlSugar 就是其中备受…...