【ROS2综合案例】乌龟跟随
一、前期准备
1.1 安装
1. 首先安装“乌龟跟随”案例的功能包以及依赖项。
安装方式1(二进制方式安装):
sudo apt-get install ros-humble-turtle-tf2-py ros-humble-tf2-tools ros-humble-tf-transformations安装方式2(克隆源码并构建):
git clone https://github.com/ros/geometry_tutorials.git -b ros2 2. 还需要安装一个名为 transforms3d 的 Python 包,它为 tf_transformations包提供四元数和欧拉角变换功能,安装命令如下:
sudo apt install python3-pip
pip3 install transforms3d1.2 执行
1. 启动两个终端,终端1输入如下命令:该命令会启动 turtlesim_node 节点,turtlesim_node 节点中自带一只小乌龟 turtle1,除此之外还会新生成一只乌龟 turtle2,turtle2 会运行至 turtle1 的位置。
ros2 launch turtle_tf2_py turtle_tf2_demo.launch.py2. 终端2输入如下命令:该终端下可以通过键盘控制 turtle1 运动,并且 turtle2 会跟随 turtle1 运动
ros2 run turtlesim turtle_teleop_key1.3 坐标相关消息
坐标变换的实现其本质是基于话题通信的发布订阅模型的,发布方可以发布坐标系之间的相对关系,订阅方则可以监听这些消息,并实现不同坐标系之间的变换。显然的根据之前介绍,在话题通信中,接口消息作为数据载体在整个通信模型中是比较重要的一部分,本节将会介绍坐标变换中常用的两种接口消息:
1.geometry_msgs/msg/TransformStamped // 用于描述某一时刻两个坐标系之间相对关系的接口
2.geometry_msgs/msg/PointStamped // 用于描述某一时刻坐标系内某个坐标点的位置的接口第一种:geometry_msgs/msg/TransformStamped
通过如下命令查看接口定义:
ros2 interface show geometry_msgs/msg/TransformStamped接口定义解释:
std_msgs/Header headerbuiltin_interfaces/Time stamp # 时间戳int32 secuint32 nanosecstring frame_id # 父级坐标系string child_frame_id # 子级坐标系Transform transform # 子级坐标系相对于父级坐标系的位姿Vector3 translation # 三维偏移量float64 xfloat64 yfloat64 zQuaternion rotation # 四元数float64 x 0float64 y 0float64 z 0float64 w 1第二种:geometry_msgs/msg/PointStamped
通过如下命令查看接口定义:
ros2 interface show geometry_msgs/msg/PointStamped接口定义解释:
std_msgs/Header headerbuiltin_interfaces/Time stamp # 时间戳int32 secuint32 nanosecstring frame_id # 参考系
Point point # 三维坐标float64 xfloat64 yfloat64 z二、乌龟跟随实例
“乌龟跟随”案例的核心是如何确定 turtle1 相对 turtle2 的位置,只要该位置确定就可以把其作为目标点并控制 turtle2 向其运动。相对位置的确定可以通过坐标变换实现,大致思路是先分别广播 turtle1 相对于 world 和 turtle2 相对于 world 的坐标系关系,然后再通过监听坐标系关系进一步获取 turtle1 相对于 turtle2 的坐标系关系。
2.1 C++实现流程
2.1.1 准备工作
1.新建功能包:
ros2 pkg create cpp05_exercise --build-type ament_cmake --dependencies rclcpp tf2 tf2_ros geometry_msgs turtlesim2.创建launch目录:
功能包cpp05_exercise下新建launch文件,并编辑配置文件。
功能包cpp05_exercise的 CMakeLists.txt 文件添加如下内容:
install(DIRECTORY launchDESTINATION share/${PROJECT_NAME}
)2.1.2 编写生成新乌龟
功能包 cpp05_exercise 的 src 目录下,新建 C++ 文件 exer01_tf_spawn.cpp,并编辑文件,输入如下内容:
/* 需求:编写客户端,发送请求生成一只新的乌龟。步骤:1.包含头文件;2.初始化 ROS2 客户端;3.定义节点类;3-1.声明并获取参数;3-2.创建客户端;3-3.等待服务连接;3-4.组织请求数据并发送;4.创建对象指针调用其功能,并处理响应;5.释放资源。*/
// 1.包含头文件;
#include "rclcpp/rclcpp.hpp"
#include "turtlesim/srv/spawn.hpp"using namespace std::chrono_literals;// 3.定义节点类;
class TurtleSpawnClient: public rclcpp::Node{public:TurtleSpawnClient():Node("turtle_spawn_client"){// 3-1.声明并获取参数;this->declare_parameter("x",2.0);this->declare_parameter("y",8.0);this->declare_parameter("theta",0.0);this->declare_parameter("turtle_name","turtle2");x = this->get_parameter("x").as_double();y = this->get_parameter("y").as_double();theta = this->get_parameter("theta").as_double();turtle_name = this->get_parameter("turtle_name").as_string();// 3-2.创建客户端;client = this->create_client<turtlesim::srv::Spawn>("/spawn");}// 3-3.等待服务连接;bool connect_server(){while (!client->wait_for_service(1s)){if (!rclcpp::ok()){RCLCPP_INFO(this->get_logger(),"客户端退出!");return false;}RCLCPP_INFO(this->get_logger(),"服务连接中,请稍候...");}return true;}// 3-4.组织请求数据并发送;rclcpp::Client<turtlesim::srv::Spawn>::FutureAndRequestId send_request(){auto request = std::make_shared<turtlesim::srv::Spawn::Request>();request->x = x;request->y = y;request->theta = theta;request->name = turtle_name;return client->async_send_request(request);}private:rclcpp::Client<turtlesim::srv::Spawn>::SharedPtr client;float_t x,y,theta;std::string turtle_name;
};int main(int argc, char ** argv)
{// 2.初始化 ROS2 客户端;rclcpp::init(argc,argv);// 4.创建对象指针并调用其功能;auto client = std::make_shared<TurtleSpawnClient>();bool flag = client->connect_server();if (!flag){RCLCPP_INFO(client->get_logger(),"服务连接失败!");return 0;}auto response = client->send_request();// 处理响应if (rclcpp::spin_until_future_complete(client,response) == rclcpp::FutureReturnCode::SUCCESS){RCLCPP_INFO(client->get_logger(),"请求正常处理");std::string name = response.get()->name;if (name.empty()){RCLCPP_INFO(client->get_logger(),"乌龟重名导致生成失败!");} else {RCLCPP_INFO(client->get_logger(),"乌龟%s生成成功!", name.c_str());}} else {RCLCPP_INFO(client->get_logger(),"请求异常");}// 5.释放资源。rclcpp::shutdown();return 0;
}2.1.3 编写坐标变换广播
功能包 cpp05_exercise 的 src 目录下,新建 C++ 文件 exer02_tf_broadcaster.cpp,并编辑文件,输入如下内容:
/* 需求:发布乌龟坐标系到窗口坐标系的坐标变换。步骤:1.包含头文件;2.初始化 ROS 客户端;3.定义节点类;3-1.声明并解析乌龟名称参数;3-2.创建动态坐标变换发布方;3-3.创建乌龟位姿订阅方;3-4.根据订阅到的乌龟位姿生成坐标帧并广播。4.调用 spin 函数,并传入对象指针;5.释放资源。*/
// 1.包含头文件;
#include <geometry_msgs/msg/transform_stamped.hpp>#include <rclcpp/rclcpp.hpp>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2_ros/transform_broadcaster.h>
#include <turtlesim/msg/pose.hpp>using std::placeholders::_1;// 3.定义节点类;
class TurtleFrameBroadcaster : public rclcpp::Node
{
public:TurtleFrameBroadcaster(): Node("turtle_frame_broadcaster"){// 3-1.声明并解析乌龟名称参数;this->declare_parameter("turtle_name","turtle1");turtle_name = this->get_parameter("turtle_name").as_string();// 3-2.创建动态坐标变换发布方;tf_broadcaster_ = std::make_unique<tf2_ros::TransformBroadcaster>(*this);std::string topic_name = turtle_name + "/pose";// 3-3.创建乌龟位姿订阅方;subscription_ = this->create_subscription<turtlesim::msg::Pose>(topic_name, 10,std::bind(&TurtleFrameBroadcaster::handle_turtle_pose, this, _1));}private:// 3-4.根据订阅到的乌龟位姿生成坐标帧并广播。 void handle_turtle_pose(const turtlesim::msg::Pose & msg){// 组织消息geometry_msgs::msg::TransformStamped t;rclcpp::Time now = this->get_clock()->now();t.header.stamp = now;t.header.frame_id = "world";t.child_frame_id = turtle_name;t.transform.translation.x = msg.x;t.transform.translation.y = msg.y;t.transform.translation.z = 0.0;tf2::Quaternion q;q.setRPY(0, 0, msg.theta);t.transform.rotation.x = q.x();t.transform.rotation.y = q.y();t.transform.rotation.z = q.z();t.transform.rotation.w = q.w();// 发布消息tf_broadcaster_->sendTransform(t);}rclcpp::Subscription<turtlesim::msg::Pose>::SharedPtr subscription_;std::unique_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_;std::string turtle_name;
};int main(int argc, char * argv[])
{// 2.初始化 ROS 客户端;rclcpp::init(argc, argv);// 4.调用 spin 函数,并传入对象指针;rclcpp::spin(std::make_shared<TurtleFrameBroadcaster>());// 5.释放资源。rclcpp::shutdown();return 0;
}2.1.4 编写坐标变换监听
功能包 cpp05_exercise 的 src 目录下,新建 C++ 文件 exer03_tf_listener.cpp,并编辑文件,输入如下内容:
/* 需求:广播的坐标系消息,并生成 turtle2 相对于 turtle1 的坐标系数据,并进一步生成控制 turtle2 运动的速度指令。步骤:1.包含头文件;2.初始化 ROS 客户端;3.定义节点类;3-1.声明并解析参数;3-2.创建tf缓存对象指针;3-3.创建tf监听器;3-4.按照条件查找符合条件的坐标系并生成变换后的坐标帧。3-5.生成 turtle2 的速度指令,并发布。4.调用 spin 函数,并传入对象指针;5.释放资源。*/
#include "rclcpp/rclcpp.hpp"
#include "tf2_ros/transform_listener.h"
#include "tf2_ros/buffer.h"
#include "tf2/LinearMath/Quaternion.h"
#include "geometry_msgs/msg/twist.hpp"using namespace std::chrono_literals;// 3.定义节点类;
class TurtleFrameListener : public rclcpp::Node {
public:TurtleFrameListener():Node("turtle_frame_listener"){// 3-1.声明并解析参数;this->declare_parameter("target_frame","turtle2");this->declare_parameter("source_frame","turtle1");target_frame = this->get_parameter("target_frame").as_string();source_frame = this->get_parameter("source_frame").as_string();// 3-2.创建tf缓存对象指针;tf_buffer_ = std::make_unique<tf2_ros::Buffer>(this->get_clock());// 3-3.创建tf监听器;transform_listener_ = std::make_shared<tf2_ros::TransformListener>(*tf_buffer_);twist_pub_ = this->create_publisher<geometry_msgs::msg::Twist>(target_frame + "/cmd_vel",10);timer_ = this->create_wall_timer(1s, std::bind(&TurtleFrameListener::on_timer,this));}private:void on_timer(){// 3-4.按照条件查找符合条件的坐标系并生成变换后的坐标帧。geometry_msgs::msg::TransformStamped transformStamped;try{transformStamped = tf_buffer_->lookupTransform(target_frame,source_frame,tf2::TimePointZero);}catch(const tf2::LookupException& e){RCLCPP_INFO(this->get_logger(),"坐标变换异常:%s",e.what());return;}// 3-5.生成 turtle2 的速度指令,并发布。geometry_msgs::msg::Twist msg;static const double scaleRotationRate = 1.0;msg.angular.z = scaleRotationRate * atan2(transformStamped.transform.translation.y,transformStamped.transform.translation.x);static const double scaleForwardSpeed = 0.5;msg.linear.x = scaleForwardSpeed * sqrt(pow(transformStamped.transform.translation.x, 2) +pow(transformStamped.transform.translation.y, 2));twist_pub_->publish(msg);}rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr twist_pub_;rclcpp::TimerBase::SharedPtr timer_;std::shared_ptr<tf2_ros::TransformListener> transform_listener_;std::unique_ptr<tf2_ros::Buffer> tf_buffer_;std::string target_frame;std::string source_frame;
};int main(int argc, char const *argv[])
{// 2.初始化 ROS 客户端;rclcpp::init(argc,argv);// 4.调用 spin 函数,并传入对象指针;rclcpp::spin(std::make_shared<TurtleFrameListener>());// 5.释放资源。rclcpp::shutdown();return 0;
}2.1.5 编写 launch 文件
launch 目录下新建文件exer01_turtle_follow.launch.py,并编辑文件,输入如下内容:
from launch import LaunchDescription
from launch_ros.actions import Node
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfigurationdef generate_launch_description():# 声明参数turtle1 = DeclareLaunchArgument(name="turtle1",default_value="turtle1")turtle2 = DeclareLaunchArgument(name="turtle2",default_value="turtle2")# 启动 turtlesim_node 节点turtlesim_node = Node(package="turtlesim", executable="turtlesim_node", name="t1")# 生成一只新乌龟spawn = Node(package="cpp05_exercise", executable="exer01_tf_spawn",name="spawn1",parameters=[{"turtle_name":LaunchConfiguration("turtle2")}])# tf 广播tf_broadcaster1 = Node(package="cpp05_exercise",executable="exer02_tf_broadcaster",name="tf_broadcaster1")tf_broadcaster2 = Node(package="cpp05_exercise",executable="exer02_tf_broadcaster",name="tf_broadcaster1",parameters=[{"turtle_name":LaunchConfiguration("turtle2")}])# tf 监听tf_listener = Node(package="cpp05_exercise",executable="exer03_tf_listener",name="tf_listener",parameters=[{"target_frame":LaunchConfiguration("turtle2"),"source_frame":LaunchConfiguration("turtle1")}])return LaunchDescription([turtle1,turtle2,turtlesim_node,spawn,tf_broadcaster1,tf_broadcaster2,tf_listener])2.1.6 编辑配置文件
1.package.xml
在创建功能包时,所依赖的功能包已经自动配置了,配置内容如下:
<depend>rclcpp</depend>
<depend>tf2</depend>
<depend>tf2_ros</depend>
<depend>geometry_msgs</depend>
<depend>turtlesim</depend>2.CMakeLists.txt
CMakeLists.txt 中发布和订阅程序核心配置如下:
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tf2 REQUIRED)
find_package(tf2_ros REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(turtlesim REQUIRED)add_executable(exer01_tf_spawn src/exer01_tf_spawn.cpp)
ament_target_dependencies(exer01_tf_spawn"rclcpp""tf2""tf2_ros""geometry_msgs""turtlesim"
)add_executable(exer02_tf_broadcaster src/exer02_tf_broadcaster.cpp)
ament_target_dependencies(exer02_tf_broadcaster"rclcpp""tf2""tf2_ros""geometry_msgs""turtlesim"
)add_executable(exer03_tf_listener src/exer03_tf_listener.cpp)
ament_target_dependencies(exer03_tf_listener"rclcpp""tf2""tf2_ros""geometry_msgs""turtlesim"
)install(TARGETS exer01_tf_spawnexer02_tf_broadcasterexer03_tf_listenerDESTINATION lib/${PROJECT_NAME})install(DIRECTORY launchDESTINATION share/${PROJECT_NAME}
)2.1.7 编译执行
终端中进入当前工作空间,编译功能包:
colcon build --packages-select cpp05_exercise当前工作空间下启动终端,输入如下命令运行launch文件:
. install/setup.bash
ros2 launch cpp05_exercise exer01_turtle_follow.launch.py再新建终端,启动 turtlesim 键盘控制节点:该终端下可以通过键盘控制 turtle1 运动,并且 turtle2 会跟随 turtle1 运动。最终的运行结果与演示案例类似。
ros2 run turtlesim turtle_teleop_key最终效果展示。
2.2 Python实现流程
2.2.1 准备工作
1.新建功能包:
ros2 pkg create py05_exercise --build-type ament_python --dependencies rclpy tf_transformations tf2_ros geometry_msgs turtlesim2.创建launch目录:
功能包py05_exercise下新建launch文件,并编辑配置文件。
功能包py05_exercise的 setup.py 文件中需要修改 data_files 属性,修改后的内容如下:
data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml'],),('share/' + package_name, glob("launch/*.launch.xml")),('share/' + package_name, glob("launch/*.launch.py")),('share/' + package_name, glob("launch/*.launch.yaml")),
],2.2.2 编写生成新乌龟
功能包 py05_exercise 的 py05_exercise 目录下,新建 Python 文件 exer01_tf_spawn_py.py,并编辑文件,输入如下内容:
""" 需求:编写客户端,发送请求生成一只新的乌龟。步骤:1.导包;2.初始化 ROS2 客户端;3.定义节点类;3-1.声明并获取参数;3-2.创建客户端;3-3.等待服务连接;3-4.组织请求数据并发送;4.创建对象调用其功能,并处理响应;5.释放资源。
"""
# 1.导包;
import rclpy
from rclpy.node import Node
from turtlesim.srv import Spawn# 3.定义节点类;
class TurtleSpawnClient(Node):def __init__(self):super().__init__('turtle_spawn_client_py')# 3-1.声明并获取参数;self.x = self.declare_parameter("x",2.0)self.y = self.declare_parameter("y",2.0)self.theta = self.declare_parameter("theta",0.0)self.turtle_name = self.declare_parameter("turtle_name","turtle2")# 3-2.创建客户端;self.cli = self.create_client(Spawn, '/spawn')# 3-3.等待服务连接;while not self.cli.wait_for_service(timeout_sec=1.0):self.get_logger().info('服务连接中,请稍候...')self.req = Spawn.Request()# 3-4.组织请求数据并发送;def send_request(self):self.req.x = self.get_parameter("x").get_parameter_value().double_valueself.req.y = self.get_parameter("y").get_parameter_value().double_valueself.req.theta = self.get_parameter("theta").get_parameter_value().double_valueself.req.name = self.get_parameter("turtle_name").get_parameter_value().string_valueself.future = self.cli.call_async(self.req)def main():# 2.初始化 ROS2 客户端;rclpy.init()# 4.创建对象并调用其功能;client = TurtleSpawnClient()client.send_request()# 处理响应rclpy.spin_until_future_complete(client,client.future)try:response = client.future.result()except Exception as e:client.get_logger().info('服务请求失败: %r' % e)else:if len(response.name) == 0:client.get_logger().info('乌龟重名了,创建失败!')else:client.get_logger().info('乌龟%s被创建' % response.name)# 5.释放资源。rclpy.shutdown()if __name__ == '__main__':main()2.2.3 编写坐标变换广播
功能包 py05_exercise 的 py05_exercise 目录下,新建 Python 文件 exer02_tf_broadcaster_py.py,并编辑文件,输入如下内容:
""" 需求:发布乌龟坐标系到窗口坐标系的坐标变换。步骤:1.导包;2.初始化 ROS2 客户端;3.定义节点类;3-1.声明并解析乌龟名称参数;3-2.创建动态坐标变换发布方;3-3.创建乌龟位姿订阅方;3-4.根据订阅到的乌龟位姿生成坐标帧并广播。4.调用 spin 函数,并传入对象;5.释放资源。"""
# 1.导包;
from geometry_msgs.msg import TransformStamped
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
import tf_transformations
from turtlesim.msg import Pose# 3.定义节点类;
class TurtleFrameBroadcaster(Node):def __init__(self):super().__init__('turtle_frame_broadcaster_py')# 3-1.声明并解析乌龟名称参数;self.declare_parameter('turtle_name', 'turtle1')self.turtlename = self.get_parameter('turtle_name').get_parameter_value().string_value# 3-2.创建动态坐标变换发布方;self.br = TransformBroadcaster(self)# 3-3.创建乌龟位姿订阅方;self.subscription = self.create_subscription(Pose,self.turtlename+ '/pose',self.handle_turtle_pose,1)self.subscriptiondef handle_turtle_pose(self, msg):# 3-4.根据订阅到的乌龟位姿生成坐标帧并广播。t = TransformStamped()t.header.stamp = self.get_clock().now().to_msg()t.header.frame_id = 'world't.child_frame_id = self.turtlenamet.transform.translation.x = msg.xt.transform.translation.y = msg.yt.transform.translation.z = 0.0q = tf_transformations.quaternion_from_euler(0, 0, msg.theta)t.transform.rotation.x = q[0]t.transform.rotation.y = q[1]t.transform.rotation.z = q[2]t.transform.rotation.w = q[3]self.br.sendTransform(t)def main():# 2.初始化 ROS2 客户端;rclpy.init()# 4.调用 spin 函数,并传入对象;node = TurtleFrameBroadcaster()try:rclpy.spin(node)except KeyboardInterrupt:pass# 5.释放资源。rclpy.shutdown()2.2.4 编写坐标变换监听
功能包 py05_exercise 的 py05_exercise 目录下,新建 Python 文件 exer03_tf_listener_py.py,并编辑文件,输入如下内容:
""" 需求:广播的坐标系消息,并生成 turtle2 相对于 turtle1 的坐标系数据,并进一步生成控制 turtle2 运动的速度指令。步骤:1.导包;2.初始化 ROS2 客户端;3.定义节点类;3-1.声明并解析参数;3-2.创建tf缓存对象指针;3-3.创建tf监听器;3-4.按照条件查找符合条件的坐标系并生成变换后的坐标帧。4.调用 spin 函数,并传入对象;5.释放资源。"""
# 1.导包;
import math
from geometry_msgs.msg import Twist
import rclpy
from rclpy.node import Node
from tf2_ros import TransformException
from tf2_ros.buffer import Buffer
from tf2_ros.transform_listener import TransformListener# 3.定义节点类;
class TurtleFrameListener(Node):def __init__(self):super().__init__('turtle_frame_listener_py')# 3-1.声明并解析参数;self.declare_parameter('target_frame', 'turtle2')self.declare_parameter('source_frame', 'turtle1')self.target_frame = self.get_parameter('target_frame').get_parameter_value().string_valueself.source_frame = self.get_parameter('source_frame').get_parameter_value().string_value# 3-2.创建tf缓存对象指针;self.tf_buffer = Buffer()# 3-3.创建tf监听器;self.tf_listener = TransformListener(self.tf_buffer, self)self.publisher = self.create_publisher(Twist, self.target_frame + '/cmd_vel', 1)self.timer = self.create_timer(1.0, self.on_timer)def on_timer(self):# 3-4.按照条件查找符合条件的坐标系并生成变换后的坐标帧。try:now = rclpy.time.Time()trans = self.tf_buffer.lookup_transform(self.target_frame,self.source_frame,now)except TransformException as ex:self.get_logger().info('%s 到 %s 坐标变换异常!' % (self.source_frame,self.target_frame))return# 3-5.生成 turtle2 的速度指令,并发布。msg = Twist()scale_rotation_rate = 1.0msg.angular.z = scale_rotation_rate * math.atan2(trans.transform.translation.y,trans.transform.translation.x)scale_forward_speed = 0.5msg.linear.x = scale_forward_speed * math.sqrt(trans.transform.translation.x ** 2 +trans.transform.translation.y ** 2)self.publisher.publish(msg)def main():# 2.初始化 ROS2 客户端;rclpy.init()# 4.调用 spin 函数,并传入对象;node = TurtleFrameListener()try:rclpy.spin(node)except KeyboardInterrupt:pass# 5.释放资源。rclpy.shutdown()2.2.5 编写 launch 文件
launch 目录下新建文件 exer01_turtle_follow.launch.xml,并编辑文件,输入如下内容:
<launch><!-- 乌龟准备 --><node pkg="turtlesim" exec="turtlesim_node" name="t1" /><node pkg="py05_exercise" exec="exer01_tf_spawn_py" name="t2" /><!-- 发布坐标变换 --><node pkg="py05_exercise" exec="exer02_tf_broadcaster_py" name="tf_broadcaster1_py"></node><node pkg="py05_exercise" exec="exer02_tf_broadcaster_py" name="tf_broadcaster2_py"><param name="turtle_name" value="turtle2" /></node><!-- 监听坐标变换 --><node pkg="py05_exercise" exec="exer03_tf_listener_py" name="tf_listener_py"><param name="target_frame" value="turtle2" /><param name="source_frame" value="turtle1" /></node>
</launch>2.2.6 编辑配置文件
1.package.xml
在创建功能包时,所依赖的功能包已经自动配置了,配置内容如下:
<depend>rclpy</depend>
<depend>tf_transformations</depend>
<depend>tf2_ros</depend>
<depend>geometry_msgs</depend>
<depend>turtlesim</depend>
2.setup.py
entry_points字段的console_scripts中添加如下内容:
entry_points={'console_scripts': ['exer01_tf_spawn_py = py05_exercise.exer01_tf_spawn_py:main','exer02_tf_broadcaster_py = py05_exercise.exer02_tf_broadcaster_py:main','exer03_tf_listener_py = py05_exercise.exer03_tf_listener_py:main'],
},
2.2.7 编译执行
终端中进入当前工作空间,编译功能包:
colcon build --packages-select py05_exercise
当前工作空间下启动终端,输入如下命令运行launch文件:
. install/setup.bash
ros2 launch py05_exercise exer01_turtle_follow.launch.xml
再新建终端,启动 turtlesim 键盘控制节点:
ros2 run turtlesim turtle_teleop_key
该终端下可以通过键盘控制 turtle1 运动,并且 turtle2 会跟随 turtle1 运动。最终的运行结果与C++实现类似。
相关文章:

【ROS2综合案例】乌龟跟随
一、前期准备 1.1 安装 1. 首先安装“乌龟跟随”案例的功能包以及依赖项。 安装方式1(二进制方式安装): sudo apt-get install ros-humble-turtle-tf2-py ros-humble-tf2-tools ros-humble-tf-transformations 安装方式2(克…...

多式联运最优路径算法
多式联运的最优路径优化问题涉及运输成本、时间、碳排放等多目标权衡,需结合运输方式(公路、铁路、水路、航空等)的协同性,通过算法模型寻找综合最优解。以下是相关研究进展与算法应用的总结: 一、多式联运路径优化的核…...

GPT-SWARM和AgentVerse的拓扑结构和交互机制
GPT-SWARM和AgentVerse的拓扑结构和交互机制 拓扑结构区别 GPT-SWARM:采用图结构,将语言智能体系统描述为可优化的计算图。图中的每个节点代表一个操作,如语言模型推理或工具使用等特定功能,边则描述了操作之间的信息流,代表智能体之间的通信渠道。多个智能体连接形成的复…...

信号检测和信道均衡的联系
1. 系统模型 假设一个通信系统的数学模型如下: 发送信号: s [ s 1 , s 2 , … , s N ] T \mathbf{s} [s_1, s_2, \dots, s_N]^T s[s1,s2,…,sN]T,其中 s i s_i si 是发送符号。信道矩阵: H \mathbf{H} H(…...

优化线程池关闭机制以避免无限循环
引言 在多线程编程中,正确关闭线程池是一个重要的任务,以确保程序的稳定性和资源的有效利用。本文将探讨一种常见的线程池关闭机制,并提出优化建议,以避免无限循环和资源浪费。 问题描述 在实际开发中,我们经常使用…...

持久性HTTPVS.非持久性HTTP
1. HTTP协议基础 HTTP(HyperText Transfer Protocol)是Web通信的核心协议,定义了客户端(浏览器)与服务器之间传输数据的规则。 在HTTP/1.0及之前的版本中,默认使用非持久性连接,而HTTP/1.1及更…...

自动化UI测试 | 什么是测试驱动开发(TDD)和行为驱动开发(BDD)?有何区别?
TDD(测试驱动开发)和BDD(行为驱动开发)是两种独特的软件开发技术,它们在测试的内容和方式上有所不同。尽管名称相似,但服务于不同的目的。 什么是TDD? TDD代表测试驱动开发。它是一个过程&…...

在 PyCharm 中接入deepseek的API的各种方法
在 PyCharm 中接入 DeepSeek 的 API,通常需要以下步骤: 1. 获取 DeepSeek API 密钥 首先,确保你已经在 DeepSeek 平台上注册并获取了 API 密钥(API Key)。如果没有,请访问 DeepSeek 的官方网站注册并申请 …...

postman登录cookie设置
1.设置环境变量, 定义变量存放共享的登录信息 如Cookie 2.登录接口编码test脚本获取cookie信息 let jsessionidCookie pm.cookies.get("JSESSIONID");if (jsessionidCookie) {let cookie "JSESSIONID" jsessionidCookie "; Admin-Tok…...

如何使用ps批量去除固定位置水印
使用 Photoshop 批量去除固定位置的水印,有几种方法可以实现自动化,具体取决于水印的复杂程度和你对 Photoshop 的熟悉程度: 1. 动作(Actions) 批处理(Batch): 这是最常用的方法&…...

AI代理软件行业白皮书
本AI代理软件行业白皮书的前言应涵盖以下核心内容: 行业背景与市场趋势 全球AI代理构建软件市场2023年销售额达3.17亿美元,预计2030年将增至4.77亿美元(年复合增长率6.7%),中国市场增长尤为显著。IBM、Microsoft等企业…...

基于图像处理的裂缝检测与特征提取
一、引言 裂缝检测是基础设施监测中至关重要的一项任务,尤其是在土木工程和建筑工程领域。随着自动化技术的发展,传统的人工巡检方法逐渐被基于图像分析的自动化检测系统所取代。通过计算机视觉和图像处理技术,能够高效、精确地提取裂缝的几何特征,如长度、宽度、方向、面…...

机器学习·逻辑回归
前言 逻辑回归虽然名称中有 “回归”,但实际上用于分类问题。基于线性回归的模型,通过使用逻辑函数(如 Sigmoid 函数)将线性组合的结果映射到0到1之间的概率值,用于表示属于某个类别的可能性。 一、逻辑回归 vs 线性回…...

C#上位机--结构
引言 在 C# 上位机开发中,我们常常需要处理各种数据,例如从硬件设备采集到的传感器数据、与下位机通信时传输的数据包等。结构(struct)作为 C# 中的一种值类型,在这种场景下有着广泛且重要的应用。它可以将多个相关的…...

hydra.utils.instantiate函数介绍
hydra.utils.instantiate 是 Hydra 提供的一个动态实例化函数,它可以根据 OmegaConf 配置字典(DictConfig) 自动创建 Python 对象(如类、函数等)。 它的主要作用是: ✅ 从配置文件动态创建对象(…...

Qt的QTableWidget样式设置
在 Qt 中,可以通过样式表(QSS)为 QTableWidget 设置各种样式。以下是一些常见的样式设置示例: 1. 基本样式设置 tableWidget->setStyleSheet(// 表格整体样式"QTableWidget {"" background-color: #F0F0F0;…...
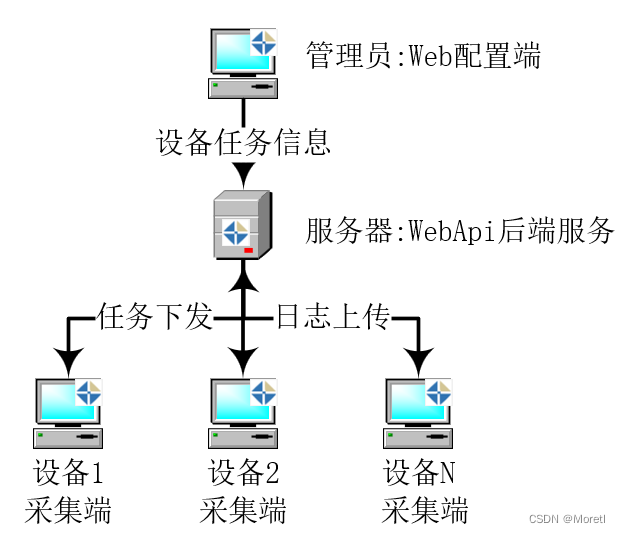
Moretl 增量文件采集工具
永久免费: <下载> <使用说明> 用途 定时全量或增量采集工控机,电脑文件或日志. 优势 开箱即用: 解压直接运行.不需额外下载.管理设备: 后台统一管理客户端.无人值守: 客户端自启动,自更新.稳定安全: 架构简单,兼容性好,通过授权控制访问. 架构 技术架构: Asp…...
(CVE-2024-57241))
dedecms 开放重定向漏洞(附脚本)(CVE-2024-57241)
免责申明: 本文所描述的漏洞及其复现步骤仅供网络安全研究与教育目的使用。任何人不得将本文提供的信息用于非法目的或未经授权的系统测试。作者不对任何由于使用本文信息而导致的直接或间接损害承担责任。如涉及侵权,请及时与我们联系,我们将尽快处理并删除相关内容。 0x0…...

深入理解 MyBatis 框架的核心对象:SqlSession
Mybatis框架中的SqlSession对象详解 引言 MyBatis 是一个优秀的持久层框架,它支持定制化 SQL、存储过程以及高级映射。MyBatis 避免了几乎所有的 JDBC 代码和手动设置参数以及获取结果集的工作。MyBatis 可以使用简单的 XML 或注解来配置和映射原生信息࿰…...
)
ndk 编译opencv(去除libandroid.so mediandk依赖)
简单的bash运行 需要关注的: OPENCV_EXTRA_MODULES_PATH : opencv contrib库BUILD_opencv_XXX :添加contrib库后默认是contrib库全部编译,用这个控制需要关闭的NDK的路径 export ANDROID_NDK/media/hello/data/3rd_party/25.2.…...
)
VSCode界面突然变英文了?别慌,一分钟教你切回中文(附快捷键和常见问题解决)
VSCode界面突然变英文了?别慌,一分钟教你切回中文(附快捷键和常见问题解决) 早上打开VSCode准备写代码,突然发现所有菜单和按钮都变成了英文?这种突如其来的"国际化"体验确实让人措手不及。别担…...

从玩具到生产:基于run-llama/rags构建模块化RAG系统的工程实践
1. 项目概述:从“玩具”到“生产力”的RAG系统构建如果你最近在关注大语言模型的应用落地,那么“RAG”这个词一定高频出现在你的视野里。RAG,即检索增强生成,它试图解决大模型“一本正经胡说八道”和“知识陈旧”两大核心痛点。简…...

Zotero茉莉花插件:3大功能轻松管理中文文献,科研效率翻倍提升
Zotero茉莉花插件:3大功能轻松管理中文文献,科研效率翻倍提升 【免费下载链接】jasminum A Zotero add-on to retrive CNKI meta data. 一个简单的Zotero 插件,用于识别中文元数据 项目地址: https://gitcode.com/gh_mirrors/ja/jasminum …...

电池创新如何跨越量产鸿沟:从实验室到工厂的工程化实践
1. 从实验室到工厂:电池创新的“量产魔咒”最近几年,电池行业绝对是资本和媒体眼中的“香饽饽”。动辄数十亿、上百亿美元的投资砸向新的生产设施和前沿技术,目标直指电动汽车、智能电网乃至整个智慧城市的能源基石。新闻稿里,我们…...

移动通信浪潮如何重塑半导体产业格局:从高通与英特尔市值对比说起
1. 从市场估值看产业浪潮:移动通信如何重塑半导体格局2013年春天,一则消息在半导体和投资圈内引发了不小的震动:无线通信芯片巨头高通(Qualcomm)的市值,悄然与行业传统霸主英特尔(Intel…...

基于MCP协议与向量数据库的AI代码记忆系统实战指南
1. 项目概述:当AI助手拥有“长期记忆”最近在折腾AI应用开发的朋友,可能都遇到过同一个痛点:你让Claude或者GPT帮你分析一个复杂的代码库,第一次对话时,它能把项目结构、核心逻辑讲得头头是道。但当你第二天再打开聊天…...

LSLib:让《神界原罪》和《博德之门3》MOD制作变得高效完整的实用指南
LSLib:让《神界原罪》和《博德之门3》MOD制作变得高效完整的实用指南 【免费下载链接】lslib Tools for manipulating Divinity Original Sin and Baldurs Gate 3 files 项目地址: https://gitcode.com/gh_mirrors/ls/lslib 你是否曾想为《神界原罪》或《博德…...
)
ClaudeCode入门08-Git配合(小白入门:不知道怎么写Git提交记录?让AI自动帮你写好)
🎯 本文目标 学会用 Claude Code 自动化 Git 工作流:自动写 Commit Message、管理分支、处理冲突。 😰 Git 新手的痛点 git commit -m "fix" git commit -m "update" git commit -m "修改了一些东西" 不知道 Conventional Commits 是什么 …...

面试过程中被问懵
高并发内存池中基数数相比哈希表差别,优势在哪相比传统的哈希表(Hash Table),基数树在内存管理这种特定场景下具有压倒性的优势。哈希表(哈希表)逻辑:通过哈希函数将 转换为数组下标。PageID锁定…...

Cesium三维地形剖切与开挖:从原理到可复用组件封装
1. 为什么需要地形剖切与开挖功能? 在三维地理信息系统中,地形剖切与开挖是最常用的分析功能之一。想象一下,你正在规划一条地下隧道,或者需要分析某处地质构造,这时候如果能把地表"切开"查看内部情况&#…...