A与B组件自动对齐与组装,无映射直接补偿。
网上针对组装的从视觉到控制动作,要不就是收费,要不就是简单介绍。这么详细的比较难找~
手下留情,不喜勿喷!
Show time~

分步解决方案:
标定阶段(Calibration)
9点张氏标定(每个位置A1、A2、B1、B2):
使用机械手在相机视野内沿Z字形路径移动,覆盖9个点(XY方向间距根据视野范围设定)。
通过图像识别每个点的像素坐标,结合机械手的实际坐标,计算相机到机械手的变换矩阵(包含旋转和平移)。
输出每个位置的独立标定矩阵(如Mat_A1, Mat_A2, Mat_B1, Mat_B2)。
5点旋转中心标定(每个位置):
固定机械手在当前位置(如A1),绕Z轴以0.1度为步进旋转,拍摄5个角度(例如0°, 0.1°, 0.2°, 0.3°, 0.4°),记录每个角度下的特征点坐标。
通过最小二乘法拟合旋转中心坐标(机械坐标系下的点),并生成旋转补偿矩阵。
存储每个位置的旋转中心坐标(如RotCenter_A1)及角度-坐标映射关系。
基准点设定(Reference Setup)
拍摄基准图像:
机械手携带标准产品依次到达A1、A2、B1、B2,各位置拍摄图像。
提取图像特征点(如边缘、孔位等)的像素坐标,通过对应标定矩阵转换为机械坐标(如Ref_A1_X, Ref_A1_Y)。
建立基准线段与中心点:
对A1和A2的基准坐标,计算基准线段的端点(如线段Ref_A1A2)及其中点(Center_A)。
同理处理B1和B2,得到Ref_B1B2线段及中点Center_B。
实时角度计算(Angle Calculation)
实时数据采集:
机械手携带产品到达A1、A2,拍摄实时图像,提取特征点并转换为机械坐标(Real_A1, Real_A2)。
同样获取B1、B2的实时坐标(Real_B1, Real_B2)。
平移补偿:
计算实时线段(Real_A1A2)的中点,与基准中点(Center_A)的偏差(ΔX, ΔY)。
控制机械手移动,使实时中点与基准中点重合。
旋转角度计算:
通过基准线段Ref_A1A2与实时线段Real_A1A2的方向向量,计算夹角θ(使用反正切或向量点积公式)。
结合旋转中心坐标(RotCenter_A1),调整机械手绕该中心旋转θ角,使线段对齐。
同步更新B的位置数据:
重复上述步骤处理B1、B2,得到B的实时角度θ_B。
AB组装补偿(Assembly Compensation)
位置偏差补偿:
检测B的实时位置与基准的偏差(如ΔB_X = -5),则A需补偿+5(ΔA_X = 5),使得ΔA_X + ΔB_X = 0。
同样处理Y方向,确保A移动后总偏差归零。
角度同步:
计算A与B的实时角度差Δθ = θ_A - θ_B。
保持B不动,调整A的旋转角度Δθ,使两者角度一致。
最终组装:
在位置和角度补偿完成后,机械手控制A与B进行精密组装,确保接触点零误差。
关键公式与示例:
标定矩阵转换:
(
X
机械
Y
机械
)
=
Mat
位置
×
(
u
像素
v
像素
1
)
(
X
机械
Y
机械
)=Mat
位置
×
u
像素
v
像素
1
旋转角度计算:
θ
=
arctan
(
Real_A2
Y
−
Real_A1
Y
Real_A2
X
−
Real_A1
X
)
−
arctan
(
Ref_A2
Y
−
Ref_A1
Y
Ref_A2
X
−
Ref_A1
X
)
θ=arctan(
Real_A2
X
−Real_A1
X
Real_A2
Y
−Real_A1
Y
)−arctan(
Ref_A2
X
−Ref_A1
X
Ref_A2
Y
−Ref_A1
Y
)
平移补偿量:
Δ
X
=
Center_A
X
−
Real_A1
X
+
Real_A2
X
2
ΔX=Center_A
X
−
2
Real_A1
X
+Real_A2
X
注意事项:
确保标定环境稳定,避免振动或光照变化影响标定精度。
定期复检标定参数,防止机械结构磨损导致偏差。
采用滤波算法(如卡尔曼滤波)处理实时数据中的噪声,提高系统鲁棒性。
通过以上步骤ÿ
相关文章:
A与B组件自动对齐与组装,无映射直接补偿。
网上针对组装的从视觉到控制动作,要不就是收费,要不就是简单介绍。这么详细的比较难找~ 手下留情,不喜勿喷! Show time~ 分步解决方案: 标定阶段(Calibration) 9点张氏标定(每个位置A1、A2、B1、B2): 使用机械手在相机视野内沿Z字形路径移动,覆盖9个点(XY方…...

QT 读写锁
一、概述 1、读写锁是一种线程同步机制,用于解决多线程环境下的读写竞争问题。 2、读写锁允许多个线程同时获取读锁(共享访问),但只允许一个线程获取写锁(独占访问)。 3、这种机制可以提高并发性能&…...

C++ 的时间库之二:Ratio
从现在开始,我们开始介绍 C 风格的时间处理,在这之前,首先要介绍std::ratio。因为 C 的 chrono库中的时间段(duration)定义离不开std::ratio,不了解std::ratio,就很难理解duration的定义。 1 st…...

使用小雅xiaoya/Emby正确的观看电影电视剧的姿势
最近有很多小伙伴来咨询关于小雅Emby全家桶的使用问题,最常见的就是在Emby上搜索出来资源之后,点击播放会提示【播放错误】,当前没有兼容的流。 这可把很多小伙伴给急坏了……于是找到小白咨询。 嗯……怎么说呢?小白并不喜欢看电…...

Java状态机
目录 1. 概念 2. 定义状态机 3. 生成一个状态机 4. 使用 1. 概念 在Java的应用开发里面,应该会有不少的人接触到一个业务场景下,一个数据的状态会发生多种变化,最经典的例子例如订单,当然还有像用户的状态变化(冻结…...

【Pandas】pandas Series isin
Pandas2.2 Series Computations descriptive stats 方法描述Series.align(other[, join, axis, level, …])用于将两个 Series 对齐,使其具有相同的索引Series.case_when(caselist)用于根据条件列表对 Series 中的元素进行条件判断并返回相应的值Series.drop([lab…...

通过VSCode直接连接使用 GPT的编程助手
GPT的编程助手在VSC上可以直接使用 选择相应的版本都可以正常使用。每个月可以使用40条,超过限制要付费。 如下图对应的4o和claude3.5等模型都可以使用。VSC直接连接即可。 配置步骤如下: 安装VSCODE 直接,官网下载就行 https://code.vis…...

一种最常见的js加密解密
前言 在前端开发的广袤天地中,你是否遭遇过一些看似“乱码”般的代码,根本无从下手理解?这其实很可能是被 _0x处理过的代码。_0x就像一位神秘的“化妆师”,能把原本清晰的代码改头换面。今天,我就来分享如何破解这些被…...
】揭开Python爬虫的神秘面纱:基础概念全解析)
【Python爬虫(4)】揭开Python爬虫的神秘面纱:基础概念全解析
【Python爬虫】专栏简介:本专栏是 Python 爬虫领域的集大成之作,共 100 章节。从 Python 基础语法、爬虫入门知识讲起,深入探讨反爬虫、多线程、分布式等进阶技术。以大量实例为支撑,覆盖网页、图片、音频等各类数据爬取ÿ…...

SMOJ 一笔画/洛谷 P7171 COCI 2020/2021 #3 Selotejp 题解
1.一笔画 题意 给出 n 行 m 列的点阵,每个点是一个字符: “.” 或 “#” ,其中“#”表示该点是障碍物。 现在小毛的问题是: 他最少要画多少笔才能把点阵里所有的“.”都覆盖完毕(被小毛画到的点就会被覆盖ÿ…...

【Java学习】继承
一、继承 子类继承父类,子类这个类变量的引用在原有的指向子类自己类变量空间的原有访问权限上,增加上了父类类变量空间的访问权限,此时子类类变量指向的空间变为了原来子类类变量空间加上父类类变量空间,此时子类类变量空间就变成…...

计时器任务实现(保存视频和图像)
下面是一个简单的计时器任务实现,可持续地每秒保存一幅图像,也可持续地每60秒保存一个视频,图像和视频均以当前时间命名: TimerTask类的实现如下: class TimerTask { public:TimerTask(const std::string& path):…...

树莓百度百科能否揭开成都树莓集团的神秘面纱?
树莓百度百科作为大众获取信息的重要渠道,在一定程度上为人们了解树莓集团提供了窗口,但要完全揭开其神秘面纱,仍存在一定局限性。 从树莓百度百科上,我们能获取到关于树莓集团的基本信息,如公司的成立时间、法定代表人…...

【如何看懂数据手册和原理图】
【如何看懂数据手册和原理图】 文章目录 【如何看懂数据手册和原理图】1.数据手册1.1去哪里看?1.2需要注意的 2.支路3.回路4.网孔5.电路定理:基尔霍夫定律**集总参数电路** 抽象理想化5.1基尔霍夫电流定律 (KCL)5.2基尔霍夫电压定律 (KVL)5.3总结 6.读懂…...

SQL 优化工具使用之 explain 详解
一、导读 对于大部分开发人员来说,平常接触的无非就是增删改查这些基本操作,创建存储过程,视图等等都是 DBA 该干的活,但是想要把这些基本操作写的近乎完美也是一件难事。 而 explain 显示了 MySQL 如何使用索引来处理 select 语…...

深度解析Unity3D渲染管线:网格、材质与GPU渲染的协同逻辑
在3D实时渲染领域,网格(Mesh)、材质(Material)和GPU渲染三者构成了虚拟世界的基石。它们如同乐高积木的零件,通过精确的协作,最终在屏幕上呈现出复杂的视觉场景。本文将从技术原理、协作机制到性…...

POI优化Excel录入
57000单词原始录入时间258S 核心代码: List<Word> wordBookList ExcelUtil.getReader(file.getInputStream()).readAll(Word.class);if (!CollectionUtil.isEmpty(wordBookList)) {for (Word word : wordBookList) {//逐条向数据库中插入单词wordMapper.insert(word);}…...
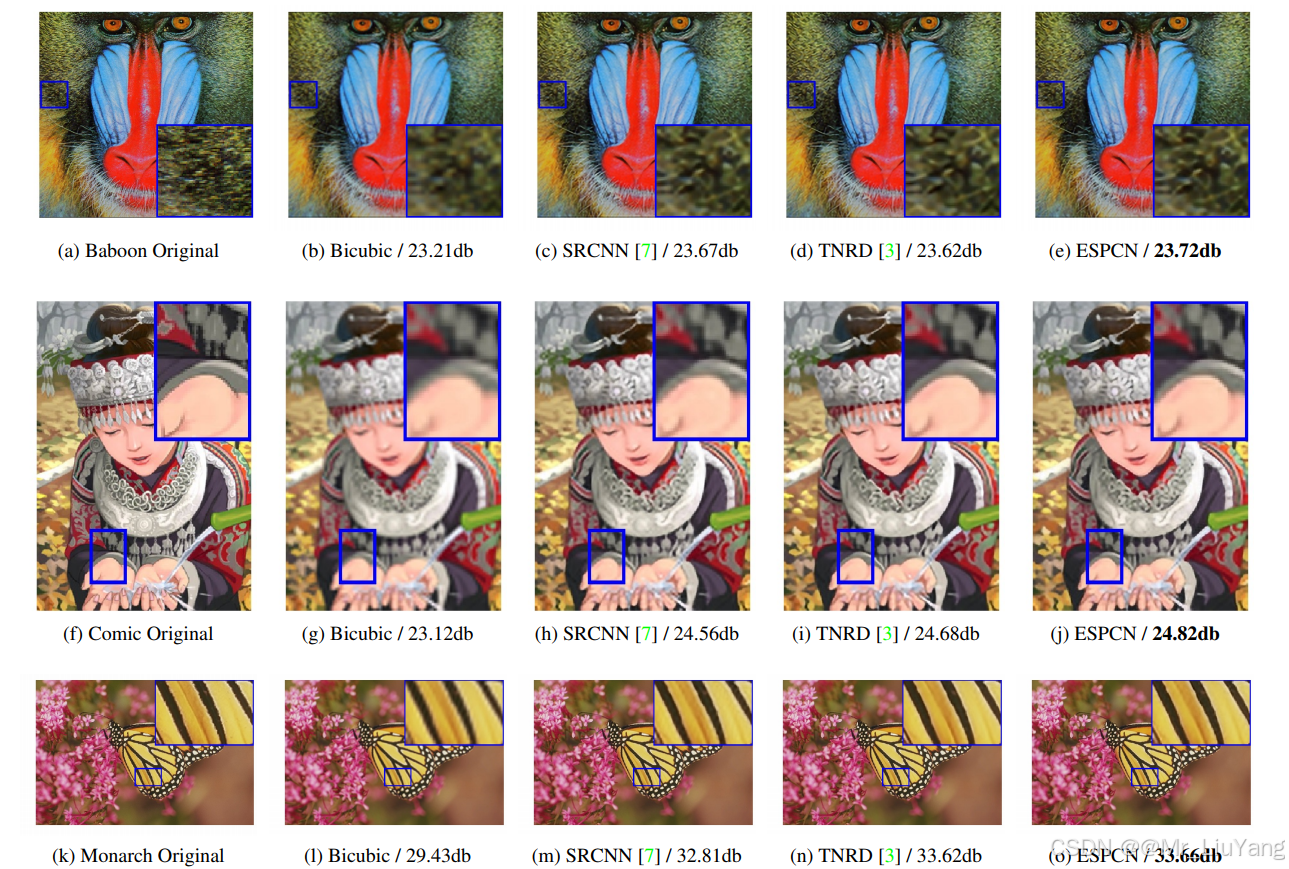
实时图像与视频超分辨率:高效子像素卷积网络(ESPCN)解析
文章目录 概要理论知识操作实操环境配置基础命令格式:效果示例 概要 超分辨率系列论文阅读卷1:Real-Time Single Image and Video Super-Resolution Using an Efficient Sub-Pixel Convolutional Neural Network PDF网址:https://arxiv.org/…...

QT--对话框的切换
文章目录 前言一、主窗口ui二、创建子窗口三、步骤1.主界面------>子页面2.子界面------>主页面 四、总结 前言 之前我们学了qt中最重要的东西–信号和槽 我们现在实现这样一个demo,程序启动后弹出主界面,点击主界面的按钮弹出子窗口,…...

深入浅出:CUDA是什么,如何利用它进行高效并行计算
在当今这个数据驱动的时代,计算能力的需求日益增加,特别是在深度学习、科学计算和图像处理等领域。为了满足这些需求,NVIDIA推出了CUDA(Compute Unified Device Architecture),这是一种并行计算平台和编程模…...

如何高效批量下载无水印抖音视频:终极解决方案指南
如何高效批量下载无水印抖音视频:终极解决方案指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support.…...

Crossref REST API 实用指南:构建高效学术元数据查询系统
Crossref REST API 实用指南:构建高效学术元数据查询系统 【免费下载链接】rest-api-doc Documentation for Crossrefs REST API. For questions or suggestions, see https://community.crossref.org/ 项目地址: https://gitcode.com/gh_mirrors/re/rest-api-doc…...
)
Win10/Win11系统下CUDA 11.6安装实录:我踩过的那些坑(临时路径、组件选择、环境变量)
Win10/Win11系统下CUDA 11.6安装实录:我踩过的那些坑 去年在部署一个深度学习项目时,我需要在Windows 11上安装CUDA 11.6。本以为按照官方文档一步步来就能轻松搞定,没想到整个过程充满了各种"惊喜"。今天我就把这些踩坑经历完整记…...

虚拟现实技术参数与用户体验的非线性关系研究
1. 研究背景与方法论解析虚拟现实技术的用户体验研究一直存在一个关键矛盾:硬件参数的提升是否必然带来体验改善?我们团队通过对比两代IVR系统(旧系统采用双基站配置,延迟85.94ms;新系统采用四基站,延迟16.…...

工行科技岗面试官亲述:我们如何在2对1面试中考察应届生的真实能力?
工行科技岗面试官亲述:我们如何在2对1面试中考察应届生的真实能力? 在金融科技快速发展的今天,银行科技岗位的竞争愈发激烈。作为工商银行科技部门的面试官,我每年都要面对数百份应届生简历,如何在短短30分钟的2对1面试…...

【紧急更新】R 4.3.3+LLM Bias Toolkit兼容性漏洞已修复!立即下载patched版本避免训练数据偏见误判
更多请点击: https://intelliparadigm.com 第一章:R 语言在大语言模型偏见检测中的统计方法 R 语言凭借其强大的统计建模能力与丰富的文本分析生态(如 tidytext、quanteda、textdata),已成为评估大语言模型࿰…...
打通前后端实时数据,在Vue/React项目里快速集成MQTTX)
从HTTP到MQTT:用WebSocket(WS/WSS)打通前后端实时数据,在Vue/React项目里快速集成MQTTX
从HTTP到MQTT:现代前端实时通信的工程实践 引言:实时数据交互的技术演进 在开发物联网仪表盘或实时监控系统时,传统的HTTP轮询方案每秒都在消耗宝贵的服务器资源。我曾参与过一个智能家居项目,最初使用HTTP轮询方案导致服务器在…...
)
PHP工程师转型AI基础设施工程师必学:Swoole协程+LLM Streaming+前端EventSource三端精准对齐实战(含WebSocket断线自动续传+上下文热迁移)
更多请点击: https://intelliparadigm.com 第一章:PHP工程师转型AI基础设施工程师的认知跃迁与技术栈重构 从处理模板渲染与数据库查询的 Web 逻辑,到调度千卡集群、优化 GPU 内存带宽、保障分布式训练容错性——这一跨越并非简单叠加新工具…...

3步解锁锐龙处理器的隐藏性能:RyzenAdj深度调优指南
3步解锁锐龙处理器的隐藏性能:RyzenAdj深度调优指南 【免费下载链接】RyzenAdj Adjust power management settings for Ryzen APUs 项目地址: https://gitcode.com/gh_mirrors/ry/RyzenAdj 你是否曾经感觉自己的AMD锐龙笔记本性能被"封印"了&#…...

题解:洛谷 P8818 [CSP-S 2022] 策略游戏
本文分享的必刷题目是从蓝桥云课、洛谷、AcWing等知名刷题平台精心挑选而来,并结合各平台提供的算法标签和难度等级进行了系统分类。题目涵盖了从基础到进阶的多种算法和数据结构,旨在为不同阶段的编程学习者提供一条清晰、平稳的学习提升路径。 欢迎大…...