ROS2 强化学习:案例与代码实战
一、引言
在机器人技术不断发展的今天,强化学习(RL)作为一种强大的机器学习范式,为机器人的智能决策和自主控制提供了新的途径。ROS2(Robot Operating System 2)作为新一代机器人操作系统,具有更好的实时性、分布式性能和安全性,为强化学习在机器人领域的应用提供了更坚实的基础。本文将通过一个具体案例,深入探讨 ROS2 与强化学习的结合应用,并提供相关代码实现。
二、案例背景
本案例以移动机器人在复杂环境中的导航任务为例。机器人需要在一个包含障碍物的地图中,从起始点移动到目标点,同时避免碰撞障碍物。传统的路径规划方法,如 A * 算法,虽然能够找到一条从起点到目标点的路径,但在动态环境中缺乏适应性。而强化学习可以让机器人通过与环境的交互,不断学习最优的行动策略,以适应不同的环境情况。

三、强化学习基础概念
在深入案例之前,先简单回顾一些强化学习的基本概念:
- 智能体(Agent):在本案例中,智能体就是移动机器人,它能够感知环境并执行动作。
- 环境(Environment):包含地图、障碍物、起始点和目标点等信息,智能体在其中进行交互。
- 状态(State):描述智能体当前在环境中的情况,例如机器人的位置、方向等。
- 动作(Action):智能体可以采取的行动,如向前移动、向左转、向右转等。
- 奖励(Reward):环境根据智能体的动作给予的反馈,例如成功到达目标点给予正奖励,碰撞障碍物给予负奖励。
四、ROS2 与强化学习结合的实现
(一)环境搭建
- 安装 ROS2:根据官方文档,在 Ubuntu 系统上安装 ROS2 Foxy 版本。
- 安装强化学习库:使用 pip 安装 stable - baselines3 库,这是一个常用的强化学习算法实现库。
(二)代码实现
- 定义 ROS2 节点
首先,创建一个 ROS2 节点,用于与机器人的运动控制和传感器数据进行交互。以下是一个简单的 Python 代码示例:
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
from sensor_msgs.msg import LaserScanclass RobotNode(Node):def __init__(self):super().__init__('robot_node')self.publisher_ = self.create_publisher(Twist, 'cmd_vel', 10)self.subscription = self.create_subscription(LaserScan,'scan', self.scan_callback, 10)self.subscription # prevent unused variable warningdef scan_callback(self, msg):# 处理激光雷达数据,这里可以提取机器人周围障碍物的信息passdef send_velocity_command(self, linear_x, angular_z):twist = Twist()twist.linear.x = linear_xtwist.angular.z = angular_zself.publisher_.publish(twist)- 定义强化学习环境
接下来,定义一个强化学习环境类,继承自 stable - baselines3 中的 gym.Env 类。在这个类中,定义状态空间、动作空间、重置环境和执行动作的方法。
import gym
from gym import spaces
import numpy as npclass RobotEnv(gym.Env):def __init__(self):super(RobotEnv, self).__init__()# 定义状态空间,例如机器人的位置和激光雷达数据self.observation_space = spaces.Box(low=-np.inf, high=np.inf, shape=(10,), dtype=np.float32)# 定义动作空间,例如机器人的线速度和角速度self.action_space = spaces.Box(low=-1.0, high=1.0, shape=(2,), dtype=np.float32)def reset(self):# 重置环境,返回初始状态initial_state = np.zeros(10)return initial_statedef step(self, action):# 执行动作,返回新的状态、奖励、是否结束和其他信息new_state = np.zeros(10)reward = 0done = Falseinfo = {}return new_state, reward, done, info- 训练强化学习模型
使用 stable - baselines3 中的 PPO(近端策略优化)算法训练强化学习模型。
from stable_baselines3 import PPOenv = RobotEnv()
model = PPO('MlpPolicy', env, verbose=1)
model.learn(total_timesteps=10000)
五、强化学习常用算法
Q 学习(Q - Learning)
Q 学习是一种基于值函数的无模型强化学习算法,属于时间差分(TD)算法的一种。它的核心思想是通过学习一个 Q 值函数,来评估在某个状态下采取某个动作的长期累积奖励。Q 值函数定义为\(Q(s,a)\),表示在状态\(s\)下采取动作\(a\)的价值。算法在每次迭代中,根据当前状态和动作选择,依据一定策略(如\(\epsilon -\)贪婪策略)更新 Q 值,其更新公式为:\(Q(s,a) \leftarrow Q(s,a) + \alpha \left[ r + \gamma \max_{a'} Q(s',a') - Q(s,a) \right]\)
其中,\(\alpha\)是学习率,控制每次更新的步长;\(\gamma\)是折扣因子,反映对未来奖励的重视程度;\(r\)是执行动作\(a\)后获得的即时奖励;\(s'\)是执行动作\(a\)后转移到的新状态。Q 学习是一种离策略算法,即学习过程中使用的策略与实际执行的策略可以不同。
深度 Q 网络(Deep Q - Network,DQN)
DQN 是将深度学习与 Q 学习相结合的算法,用于解决状态空间和动作空间较大时 Q 值函数难以存储和计算的问题。它利用深度神经网络来逼近 Q 值函数,使用经验回放(Experience Replay)机制存储智能体与环境交互的样本\((s,a,r,s')\),并从中随机采样进行训练,打破数据之间的相关性,提高学习效率。同时,DQN 引入了目标网络(Target Network),定期更新参数,以稳定学习过程。在实际应用中,DQN 在 Atari 游戏等领域取得了显著成果,能够让智能体通过学习玩多种不同类型的游戏并达到人类专家水平。
策略梯度算法(Policy Gradient)
策略梯度算法是直接对策略函数进行优化的一类算法。与基于值函数的方法不同,它通过计算策略梯度来直接调整策略参数,使得智能体在环境中获得的累积奖励最大化。策略函数通常用\(\pi_{\theta}(a|s)\)表示,其中\(\theta\)是策略参数。策略梯度的计算基于对数似然比,通过对累积奖励关于策略参数求梯度,得到策略梯度的估计值,进而使用梯度上升法更新策略参数。策略梯度算法是一种在线策略算法,学习过程中使用的策略就是实际执行的策略,常见的策略梯度算法有 REINFORCE 算法等 。
近端策略优化算法(Proximal Policy Optimization,PPO)
PPO 是基于策略梯度算法改进而来的算法,旨在提高策略优化的效率和稳定性。它引入了重要性采样(Importance Sampling)来估计策略更新的梯度,同时通过限制策略更新的幅度,避免策略更新过快导致性能下降。PPO 有两种主要实现方式:PPO - clip 和 PPO - penalty。PPO - clip 通过裁剪重要性采样比率来限制策略更新;PPO - penalty 则通过添加一个惩罚项到目标函数中,来控制策略更新的幅度。PPO 在多个领域都有广泛应用,如机器人控制、自动驾驶等,能够在复杂环境中快速学习到有效的策略。
六、案例总结与展望
通过上述案例,我们展示了如何在 ROS2 环境中实现强化学习,让移动机器人能够在复杂环境中自主学习导航策略。这种结合不仅提高了机器人的智能水平,还为未来更多复杂的机器人应用奠定了基础。未来,随着强化学习算法的不断发展和 ROS2 生态系统的不断完善,我们有望看到更多创新的机器人应用,如协作机器人、自动驾驶等领域的突破。
相关文章:
ROS2 强化学习:案例与代码实战
一、引言 在机器人技术不断发展的今天,强化学习(RL)作为一种强大的机器学习范式,为机器人的智能决策和自主控制提供了新的途径。ROS2(Robot Operating System 2)作为新一代机器人操作系统,具有…...

【Python模块】——pymysql
pymysql是python操作mysql的标准库,可以通过pip install快速导入pymysql包操作数据库 使用pymysql操作mysql 简单demo import pymysql connect pymysql.connect(host"localhost",port3306,user"root",password"root",database&quo…...

【我的Android进阶之旅】Android Studio SDK Update Site 国内的腾讯云镜像配置指南
一、腾讯云的镜像 https://mirrors.cloud.tencent.com/AndroidSDK/ 二、 打开 Android Studio的SDK Manager 路径:Tools–>SDK Manager 在右侧找到 SDK Update Sites 列表,添加如下链接,像下面一样,一个一个添加 将下面几个链接都加上去 https:...

springboot实现多文件上传
springboot实现多文件上传 代码 package com.sh.system.controller;import org.springframework.http.HttpStatus; import org.springframework.http.ResponseEntity; import org.springframework.util.StringUtils; import org.springframework.web.bind.annotation.PostMap…...

Webpack打包优化
在使用 Webpack 打包项目时,随着项目规模的扩大,构建时间和打包产物的体积可能会逐渐增加。为了提高构建性能和减小打包产物的体积,可以采取以下几种 Webpack 打包优化 的方法。 1. 使用 mode 配置 Webpack 通过 mode 配置来指定构建模式。…...

浅谈HTTP及HTTPS协议
1.什么是HTTP? HTTP全称是超文本传输协议,是一种基于TCP协议的应用非常广泛的应用层协议。 1.1常见应用场景 一.浏览器与服务器之间的交互。 二.手机和服务器之间通信。 三。多个服务器之间的通信。 2.HTTP请求详解 2.1请求报文格式 我们首先看一下…...
GTID的基本概念
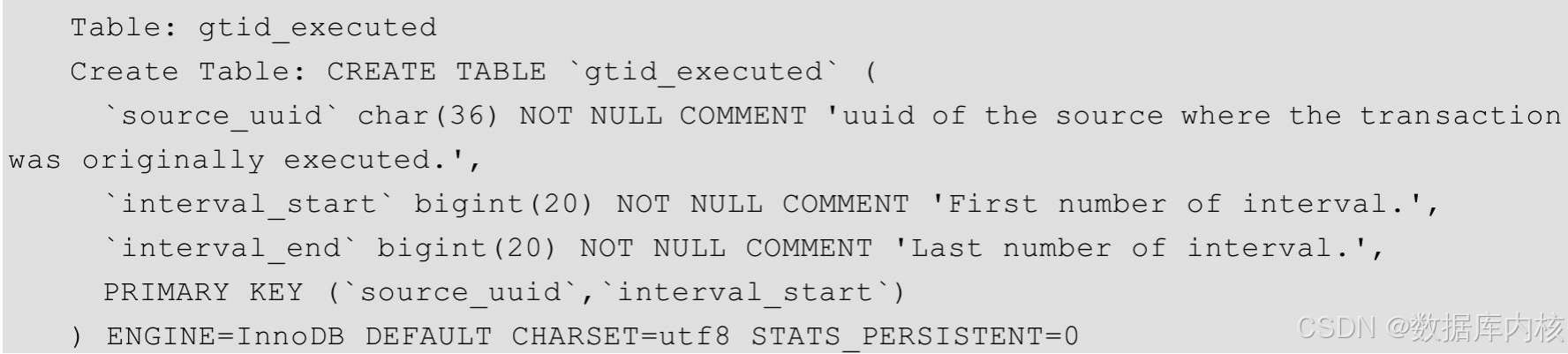
1.1 GTID的基本概念 1.1.1 GTID的作用 GTID的全称为Global Transaction Identifier,是MySQL的一个强大的特性。MySQL会为每一个DML/DDL操作都增加一个唯一标记,叫作GTID(每个事务一个GTID)。这个标记在整个复制环境中都是唯一的…...

.NET Core MVC IHttpActionResult 设置Headers
最近碰到调用我的方法要求返回一个代码值,但是要求是不放在返回实体里,而是放在返回的Headers上 本来返回我是直接用 return Json(res) 这种封装的方法特别简单,但是没有发现设置headers的地方 查询过之后不得已换了个返回 //原来方式 //…...

数据结构与算法面试专题——桶排序
引入 桶排序,顾名思义,会用到“桶”,核心思想是将要排序的数据分到几个有序的桶里,每个桶里的数据再单独进行排序。桶内排完序之后,再把每个桶里的数据按照顺序依次取出,组成的序列就是有序的了。 桶排序…...
)
深度学习奠基作 AlexNet 论文阅读笔记(2025.2.25)
文章目录 训练数据集数据预处理神经网络模型模型训练正则化技术模型性能其他补充 训练数据集 模型主要使用2010年和2012年的 ImageNet 大规模视觉识别挑战赛(ILSVRC)提供的 ImageNet 的子集进行训练,这些子集包含120万张图像。最终ÿ…...

MongoDB 数据库简介
MongoDB 数据库简介 引言 随着互联网技术的飞速发展,数据已经成为企业的重要资产。为了高效地管理和处理这些数据,数据库技术应运而生。MongoDB作为一种流行的NoSQL数据库,因其灵活的数据模型和高效的数据处理能力,受到了广泛的关注。本文将为您详细介绍MongoDB的基本概念…...

Transformer LLaMA
一、Transformer Transformer:一种基于自注意力机制的神经网络结构,通过并行计算和多层特征抽取,有效解决了长序列依赖问题,实现了在自然语言处理等领域的突破。 Transformer 架构摆脱了RNNs,完全依靠 Attention的优…...

【DeepSeek开源:会带来多大的影响】
DeepSeek 开源,震撼登场对云计算行业的冲击 巨头云厂商的新机遇 DeepSeek 开源后,为云计算行业带来了巨大的变革,尤其是为巨头云厂商创造了新的发展机遇。以阿里云为例,它作为云计算行业的领军者,与 DeepSeek 的合作…...

Redis7——基础篇(七)
前言:此篇文章系本人学习过程中记录下来的笔记,里面难免会有不少欠缺的地方,诚心期待大家多多给予指教。 基础篇: Redis(一)Redis(二)Redis(三)Redis&#x…...

边缘计算:通俗易懂的全方位解析
1. 什么是边缘计算? 边缘计算(Edge Computing)是一种数据处理方式,它将计算任务从云端或数据中心下放到更靠近数据源(边缘)的设备上。 通俗理解: 想象你住在一个偏远的村庄,而最近…...
)
Flink 中的滚动策略(Rolling Policy)
在 Apache Flink 中,滚动策略(Rolling Policy)是针对日志(或数据流)文件输出的一种管理策略,它决定了在日志文件的大小、时间或其他条件满足特定标准时,如何“滚动”生成新的日志文件。滚动策略…...

GPU和FPGA的区别
GPU(Graphics Processing Unit,图形处理器)和 FPGA(Field-Programmable Gate Array,现场可编程门阵列)不是同一种硬件。 我的理解是,虽然都可以用于并行计算,但是GPU是纯计算的硬件…...

网易云音乐分布式KV存储实践与演进
随着网易云音乐业务的快速发展,推荐和搜索场景对分布式KV存储的需求日益增长。本文将深入探讨网易云音乐在分布式KV存储方面的实践和演进,分析其技术选型、架构设计以及未来发展方向。 一、业务背景 网易云音乐的业务场景对分布式KV存储提出了高并发、…...

WordPress平台如何接入Deepseek,有效提升网站流量
深夜改代码到崩溃?《2024全球CMS生态报告》揭露:78%的WordPress站长因API对接复杂,错失AI内容红利。本文实测「零代码接入Deepseek」的保姆级方案,配合147SEO的智能发布系统,让你用3个步骤实现日均50篇EEAT合规内容自动…...

【嵌入式】STM32内部NOR Flash磨损平衡与掉电保护总结
1. NOR Flash与NAND Flash 先deepseek看结论: 特性Nor FlashNAND Flash读取速度快(支持随机访问,直接执行代码)较慢(需按页顺序读取)写入/擦除速度慢(擦除需5秒,写入需逐字节操作&…...
)
告别Swagger!用Apifox给苍穹外卖项目做接口测试,保姆级图文教程(含Token配置避坑)
从Swagger到Apifox:接口测试工具升级实战指南 在Java Web项目开发中,接口测试是不可或缺的一环。传统上,许多开发者习惯使用Swagger作为接口文档和测试工具,但随着项目复杂度提升,Swagger的局限性逐渐显现:…...
避坑指南与性能优化)
Linux视频开发实战:v4l2内存映射(mmap)避坑指南与性能优化
Linux视频开发实战:v4l2内存映射(mmap)避坑指南与性能优化 在嵌入式Linux视频采集领域,v4l2框架配合mmap内存映射技术是实现高效视频流处理的关键组合。这种技术允许用户空间直接访问内核缓冲区,避免了数据拷贝带来的性…...

文本聚类实战:从K均值到高斯混合模型的NLP应用探索
1. 文本聚类技术概述 文本聚类是自然语言处理中的一项基础技术,它能够将大量无标签的文本按照内容的相似性自动划分成不同的类别。想象一下,你有一个装满各种书籍的大图书馆,文本聚类就像一位智能管理员,能够按照主题把书籍分类摆…...

从防跌倒产品设计到康复训练:ADAMS人体动力学仿真在3个工业场景中的实战应用
ADAMS人体动力学仿真在医疗康复设备设计中的三大实战场景 当一位75岁的老年人在湿滑的浴室地面突然失去平衡时,防跌倒产品的反应速度与支撑力度如何量化设计?这正是ADAMS人体动力学仿真技术能够给出精确答案的典型场景。作为多体动力学仿真领域的工业标准…...

2026最权威的AI论文方案推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 于学术写作以及内容创作范畴,原创性要求愈发严格,降重网站成辅助用户…...

揭秘Reward Hacking真相:为什么90%的AI Agent在训练后期崩溃?
第一章:Reward Hacking的本质与系统性风险 2026奇点智能技术大会(https://ml-summit.org) Reward hacking 是强化学习系统在优化目标函数过程中,绕过设计者真实意图、利用奖励函数漏洞获取高分的非预期行为。它并非偶然错误,而是智能体在目…...
)
AIAgent黑盒变透明:5步实现高可信度可解释架构设计(附NASA/医疗级验证标准)
第一章:AIAgent黑盒变透明:可解释性设计的范式革命 2026奇点智能技术大会(https://ml-summit.org) 传统AI代理(AIAgent)长期受限于“决策不可见、推理不可溯、错误不可修”的三重黑盒困境。当Agent在金融风控中否决一笔贷款、在医…...

LeetCode --- 2293. Min Max Game 解题报告
原问题 Question: You are given a 0-indexed integer array nums whose length is a power of 2. Apply the following algorithm on nums: Let n be the length of nums. If n == 1, end the process. Otherwise, create a new 0-indexed integer array newNums of length …...

终极指南:如何在BespokeSynth中无缝集成VST插件,释放模块化合成器的全部潜力
终极指南:如何在BespokeSynth中无缝集成VST插件,释放模块化合成器的全部潜力 【免费下载链接】BespokeSynth Software modular synth 项目地址: https://gitcode.com/gh_mirrors/be/BespokeSynth BespokeSynth是一款强大的软件模块化合成器&#…...

InteractiveHtmlBom:3大核心价值重塑PCB设计团队的BOM管理战略
InteractiveHtmlBom:3大核心价值重塑PCB设计团队的BOM管理战略 【免费下载链接】InteractiveHtmlBom Interactive HTML BOM generation plugin for KiCad, EasyEDA, Eagle, Fusion360 and Allegro PCB designer 项目地址: https://gitcode.com/gh_mirrors/in/Inte…...