cv2.solvePnP 报错 求相机位姿
目录
报错信息及解决:
cv2.solvePnP 使用例子:
设置初始值效果也不好
cv2.projectPoints 函数效果不好
报错信息及解决:
File "/shared_disk/users/lbg/project/human_4d/nlf_pose/render_demo_pkl2_cal.py", line 236, in <module> success, rotation_vector, translation_vector = cv2.solvePnP(vertices, vertices2d, camera_matrix, dist_coeffs) cv2.error: OpenCV(4.10.0) /io/opencv/modules/calib3d/src/solvepnp.cpp:823: error: (-215:Assertion failed) ( (npoints >= 4) || (npoints == 3 && flags == SOLVEPNP_ITERATIVE && useExtrinsicGuess) || (npoints >= 3 && flags == SOLVEPNP_SQPNP) ) && npoints == std::max(ipoints.checkVector(2, CV_32F), ipoints.checkVector(2, CV_64F)) in function 'solvePnPGeneric'
解决方法:
把所有数据都astype(np.float32)
cv2.solvePnP 使用例子:
import cv2
import numpy as np# 三维物体点在世界坐标系中的坐标
object_points = np.array([[0, 0, 0],[0, 1, 0],[1, 1, 0],[1, 0, 0]
]).astype(np.float32)# 这些三维点在图像平面上对应的二维像素坐标
image_points = np.array([[100, 100],[100, 200],[200, 200],[200, 100]
], dtype=np.float64)# 相机的内参矩阵
camera_matrix = np.array([[1000, 0, 320],[0, 1000, 240],[0, 0, 1]
], dtype=np.float64)# 相机的畸变系数
dist_coeffs = np.zeros((5, 1), dtype=np.float32)# 求解PnP问题
success, rotation_vector, translation_vector = cv2.solvePnP(object_points, image_points, camera_matrix, dist_coeffs)if success:print("旋转向量:")print(rotation_vector)print("平移向量:")print(translation_vector)
else:print("求解失败")设置初始值效果也不好
import cv2
import numpy as np# 假设 vertices 和 vertices2d 已经准备好了
# vertices 是 3D 点集合 (Nx3)
# vertices2d 是对应的 2D 点集合 (Nx2)
# camera_matrix 是相机内参矩阵
# dist_coeffs 是畸变系数(如果有)# 相机的内参矩阵
f_x = 1000 # 焦距 fx
f_y = 1000 # 焦距 fy
c_x = 640 # 主点 cx
c_y = 360 # 主点 cy
camera_matrix = np.array([[f_x, 0, c_x],[0, f_y, c_y],[0, 0, 1]
])# 畸变系数(假设无畸变)
dist_coeffs = np.zeros(5)# 初始旋转向量(设为零)
rvec_init = np.zeros(3) # 初始旋转为零(单位向量)
tvec_init = np.zeros(3) # 初始平移为零# 使用 solvePnP 计算平移并强制旋转为零
success, rvec, tvec = cv2.solvePnP(vertices, # 3D 点vertices2d, # 对应的 2D 点camera_matrix, # 相机内参矩阵dist_coeffs, # 畸变系数rvec_init, # 初始旋转向量(零)tvec_init, # 初始平移向量(零)useExtrinsicGuess=True # 使用提供的初始旋转和平移
)# 输出计算结果
print(f"旋转向量 (rvec): {rvec}")
print(f"平移向量 (tvec): {tvec}")
cv2.projectPoints 函数效果不好
import cv2
import numpy as np
from scipy.optimize import least_squaresdef project_without_rotation(t, object_points, camera_matrix, dist_coeffs):rvec = np.zeros((3, 1)) # 零旋转tvec = t.reshape(3, 1)projected, _ = cv2.projectPoints(object_points, rvec, tvec, camera_matrix, dist_coeffs)return projected.reshape(-1, 2)def residual(t, object_points, image_points, camera_matrix, dist_coeffs):projected = project_without_rotation(t, object_points, camera_matrix, dist_coeffs)return (projected - image_points).ravel()# 输入数据:3D点、2D点、相机矩阵、畸变系数
vertices = np.array([...], dtype=np.float32) # 替换为实际3D点
vertices2d = np.array([...], dtype=np.float32) # 替换为实际2D点
camera_matrix = np.array([...], dtype=np.float32) # 替换为实际相机矩阵
dist_coeffs = np.array([...], dtype=np.float32) # 替换为实际畸变系数,可为None# 初始猜测,例如零平移
t_initial = np.zeros(3)# 可选:使用线性解法获取更好的初始值(见注释部分)# 非线性优化
result = least_squares(residual, t_initial, args=(vertices, vertices2d, camera_matrix, dist_coeffs))
t_opt = result.xprint("优化后的平移向量:", t_opt)相关文章:

cv2.solvePnP 报错 求相机位姿
目录 报错信息及解决: cv2.solvePnP 使用例子: 设置初始值效果也不好 cv2.projectPoints 函数效果不好 报错信息及解决: File "/shared_disk/users/lbg/project/human_4d/nlf_pose/render_demo_pkl2_cal.py", line 236, in <…...

Linux实操——在服务器上直接从百度网盘下载(/上传)文件
Linux Linux实操——在服务器上直接从百度网盘下载(/上传)文件 文章目录 Linux前言一、下载并安装bypy工具二、认证并授权网盘账号三、将所需文件转移至目的文件夹下四、下载文件五、上传文件六、更换绑定的百度云盘账户 前言 最近收到一批很大的数据&…...

2004-2024年光刻机系统及性能研究领域国内外发展历史、差距、研究难点热点、进展突破及下一个十年研究热点方向2025.2.27
一.光刻机概述 1.1 定义与原理 光刻机是 集成电路芯片制造的核心设备 ,其工作原理基于 光学成像和化学反应 。它通过 曝光系统 将掩模版上的图形精确地转移到涂覆于硅片表面的光刻胶上。这个过程涉及复杂的物理和化学反应,主要包括以下几个步骤: 涂胶 :在硅片表面均匀涂抹…...

请求Geoserver的WTMS服务返回200不返回图片问题-跨域导致
今天碰到个奇怪问题,改了个页面标题再打包布署GeoServer发现调用WTMS服务失败,请求返回状态码200,返回包大小0,使用postman模拟请求是可以正常返回图片的。 跟之前版本对比如下: 正常Response请求: HTTP/1.1 200X-Fr…...

ubuntu配置jmeter
1.前提准备 系统 ubuntu server 22.04 前提条件:服务器更新apt与安装lrzsz:更新apt: sudo apt update安装lrzsz: 命令行下的上传下载文件工具 sudo apt install lrzszsudo apt install zip2.安装jemeter 2.1.下载jdk17 输入命令…...

《Qt动画编程实战:轻松实现头像旋转效果》
《Qt动画编程实战:轻松实现头像旋转效果》 Qt 提供了丰富的动画框架,可以轻松实现各种平滑的动画效果。其中,旋转动画是一种常见的 UI 交互方式,广泛应用于加载指示器、按钮动画、场景变换等。本篇文章将详细介绍如何使用 Qt 实现…...
【Mac电脑本地部署Deepseek-r1:详细教程与Openwebui配置指南】
文章目录 前言电脑配置:安装的Deepseek版本:使用的UI框架:体验效果展示:本地部署体验总结 部署过程Ollama部署拉取模型运行模型Openwebui部署运行Ollama服务在Openwebui中配置ollama的服务 后话 前言 deepseek最近火的一塌糊涂&a…...

DeepSeek开源技术全景解析:从硬件榨取到AI民主化革命
DeepSeek开源技术全景解析:从硬件榨取到AI民主化革命 一、开源周核心成果概览 2025年2月24日启动的"开源周"计划,DeepSeek团队连续发布三项底层技术突破: FlashMLA(2.24):动态资源调度算法&am…...

WPF12-MVVM
目录 1. 什么是MVVM2. 实现简单MVVM2.1. Part 12.2. Part 21. 什么是MVVM MVVM 是 Model-View-ViewModel 的缩写,是一种用于构建用户界面的设计模式,是一种简化用户界面的事件驱动编程方式。 MVVM 的目标是实现用户界面和业务逻辑之间的彻底分离,以便更好地管理和维护应用…...

一个原教旨的多路径 TCP
前面提到过 ECMP 和 TCP 之间的互不友好,pacing 收益和中断开销的互斥,在事实上阻碍了 packet-based LB 的部署,也限制了交换机,服务器的并发性能,同时潜在增加了 bufferbloat 的概率,而适用 packet-based …...

跟着AI学vue第十三章
第十三章:技术传承与行业影响力塑造 到了这个阶段,你已经在Vue技术领域积累了深厚的经验,拥有了较强的技术实力。此时,你的重点将是把自己的知识和经验传递给更多人,在行业内树立起影响力,推动整个Vue技术…...

labview中VISA串口出现异常的解决方案
前两天在做项目时发现,当用VISA串口读取指令时出现了回复异常的情况,不管发什么东西就一直乱回,针对这个情况,后面在VISA串口中加了一个VISA寄存器清零的函数。加了之后果然好多了,不会出现乱回的情况,但是…...

StableDiffusion本地部署 2
StableDiffusion本地部署 为了做这个事,这是第5篇文章了,可谓是做足了准备。开干! 强烈建议把我之前发的文章看一看,不然你会有点迷迷糊糊的。 整体思路 捋一捋思路: 下载三个东西,webui,py…...
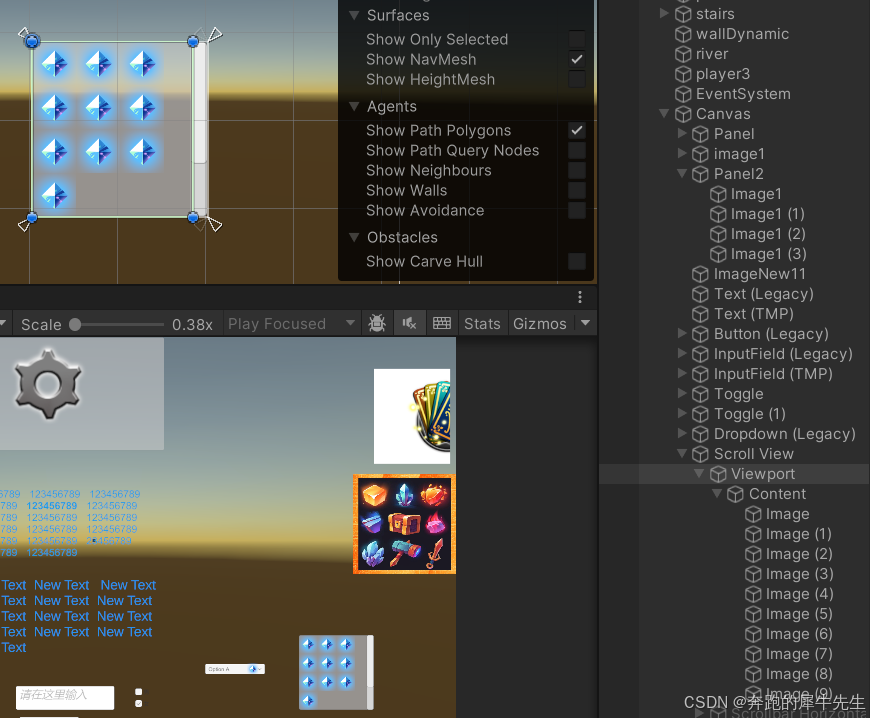
unity学习61:UI布局layout
目录 1 布局 layout 1.1 先准备测试UI,新增这样一组 panel 和 image 1.2 新增 vertical layout 1.3 现在移动任意一个image 都会影响其他 1.3.1 对比 如果没有这个,就会是覆盖效果了 1.3.2 对比 如果没有这个,就会是覆盖效果了 1.4 总结…...

BRD4缺失通过GRP78灭活内质网应激,延缓脱氢表雄酮诱导的卵巢颗粒细胞凋亡
近日,一项由宁波大学医学院附属妇女儿童医院与同济大学附属东方医院妇产科合作的研究,揭示了BRD4(Bromodomain-containing protein 4)在PCOS中的重要作用,以及其与内质网应激(ERS)的复杂关系。值…...

Jmeter插件下载及安装
1、在Jmeter官网(Install :: JMeter-Plugins.org)下载所需插件 2、将下载的插件复制到jmeter文件下的lib/ext文件里(PS:D:\Jmeter\apache-jmeter-5.6.2\lib\ext) 3、打开Jmeter,选择 选项----Plugins Manag…...

【Swift 算法实战】判断数组中是否存在重复元素
网罗开发 (小红书、快手、视频号同名) 大家好,我是 展菲,目前在上市企业从事人工智能项目研发管理工作,平时热衷于分享各种编程领域的软硬技能知识以及前沿技术,包括iOS、前端、Harmony OS、Java、Python等…...

Spock框架:让单元测试更优雅的高效武器
📖 前言:为什么选择Spock? 在软件开发领域,单元测试是保证代码质量的基石。但传统的JUnit/TestNG测试框架在面对复杂测试场景时,往往会显得力不从心。Spock框架作为新一代测试框架的佼佼者,以其独特的BDD&…...

【前端基础】Day 4 CSS盒子模型
目录 1. 盒子模型 1.1 盒子模型布局 1.2 盒子模型组成 1.3 边框 1.4 表格细线边框 1.5 边框会影响盒子实际大小 1.6 内边距 1.7 外边距 1.8 外边距合并 1.9 清除内外边距 2. PS基本操作 3. 综合案例 3.1 案例1 3.2 案例2-快报模块 4. 圆角边框 5. 盒子阴影 6…...

补题蓝桥杯14届JavaB组第4题
算法:动态规划 需要两个一维数组来进行dp 一个用来记录到当前位置的最短时间,另一个用来记录到达当前位置传送门的最短时间 到达传送门的时间需要进行判断,如果上一次传送到达传送门,需要判断上一次传送到这的位置在当前传送门…...

CANN-昇腾NPU-RAG推理-检索增强生成怎么部署
RAG(Retrieval-Augmented Generation)是 LLM 知识库的组合:先检索相关文档,再让 LLM 基于文档回答。昇腾NPU 上部署 RAG 需要两个组件:Embedding 模型(做向量检索)和 LLM(做生成&am…...

[智能体-69]:重新认知MCP:协议不生产智能,只是AI全域交互的标准化基石
MCP只是提供了大模型、编排调度、外部工具能够进行结构化交流的标准,而整个系统的智能主要依赖编排调度,与外部软件系统的交互取决于外部工具,包括外部语音交互、视觉交互、数字化交互。当下MCP(Model Context Protocol࿰…...

2026 西安 AI 问答曝光搭建技术解析:GEO 知识图谱 + 深度测评
随着大语言模型技术的快速普及,AI 搜索已经成为用户获取企业信息、商家服务的核心入口。根据中国互联网信息中心 2026 年发布的《中国人工智能搜索发展报告》显示,2025 年国内 AI 搜索用户规模突破 8.2 亿,日均搜索请求超过 20 亿次ÿ…...

13456
12356...

Windows终极PDF处理工具:3步免费安装Poppler完整指南
Windows终极PDF处理工具:3步免费安装Poppler完整指南 【免费下载链接】poppler-windows Download Poppler binaries packaged for Windows with dependencies 项目地址: https://gitcode.com/gh_mirrors/po/poppler-windows 你是否曾经为在Windows上处理PDF文…...

1901-2022年中国气温变化分析实战:用这份1km栅格数据我们能发现什么?
1901-2022年中国气温变化分析实战:如何从1km栅格数据中挖掘气候演变规律当一份覆盖122年、分辨率精确到1公里的气温栅格数据摆在面前时,我们看到的不仅是数字矩阵,更是一部写在经纬度坐标里的气候变迁史诗。这份由逐月数据聚合生成的逐年气温…...

CPU架构启发的智能仓储布局优化实践
1. 仓库布局优化的核心挑战与创新机遇在物流仓储领域,拣货环节通常占据运营成本的55%-65%,而其中约50%的时间消耗在无效行走路径上。传统矩形仓库布局虽然易于规划和施工,但其正交的通道设计导致拣货员需要频繁进行90度转向,这种&…...

打造XBEE封装BLE112蓝牙模块:硬件设计、射频布局与调试全攻略
1. 项目概述:为什么我们需要一个“XBEE格式”的蓝牙模块?在嵌入式开发和物联网项目中,无线通信模块的选择往往决定了项目的成败。对于很多工程师和创客来说,Silicon Labs(芯科科技)的BLE112/113模块是蓝牙4…...

企业云盘签章技术方案:从数字签名原理到工程落地
背景 电子签章在企业云盘中的落地,不只是一个"上传盖章图片"的功能实现。本质上,它是一套涉及数字签名、PKI基础设施、文档完整性校验的综合性技术方案。本文从技术选型角度,说清楚企业云盘内置签章需要解决哪些问题、主流实现方案…...
)
别再瞎拖拽了!Unity Prefab从创建到批量修改的保姆级工作流(含变体与嵌套实战)
Unity Prefab高效工作流:从创建到批量修改的实战指南在Unity项目开发中,Prefab(预制体)是最基础也最强大的工具之一。但很多开发者,尤其是初学者,往往停留在简单的"拖拽-修改"阶段,没…...