FASIONAD:自适应反馈的类人自动驾驶中快速和慢速思维融合系统
24年11月来自清华、早稻田大学、明尼苏达大学、多伦多大学、厦门大学马来西亚分校、电子科大(成都)、智平方科技和河南润泰数字科技的论文“FASIONAD : FAst and Slow FusION Thinking Systems for Human-Like Autonomous Driving with Adaptive Feedback”。
确保安全、舒适和高效的导航是自动驾驶系统开发和可靠性的基础。虽然在大型数据集上训练的端到端模型在标准驾驶情况下表现良好,但它们往往难以应对罕见的长尾事件。大语言模型 (LLM) 的最新进展带来改进的推理能力,但它们的高计算需求使自动驾驶汽车的实时决策和精确规划变得复杂。本文的 FASIONAD,是一个受认知模型“思考,快与慢”启发的双-系统框架。快速系统通过快速的数据驱动路径规划有效地管理常规导航任务,而慢速系统则处理不熟悉或具有挑战性的场景中的复杂推理和决策。由分数分布和反馈引导的动态切换机制,允许快速和慢速系统之间的无缝过渡。快速系统的视觉提示,促进慢速系统中类似人类的推理,这反过来又提供高质量的反馈以增强快速系统的决策。为了评估方法,引入一个源自 nuScenes 数据集的新基准,旨在区分快速和慢速场景。FASIONAD 为该基准设定新标准,开创一个区分自动驾驶中快速和慢速认知过程的框架。这种双-系统方法为创建更具适应性和更像人类的自动驾驶系统提供一个有希望的方向。
自动驾驶有可能通过提高效率、减少人工工作量和最大限度地减少事故来改变交通运输[26]。传统的自动驾驶系统通常采用模块化设计,具有用于感知、预测、规划[26]和控制的独立模块。然而,这些系统在动态和复杂环境中的适应性较差,并且在解决长尾问题和冗余方面面临挑战[46, 63],这限制了它们的可扩展性和适用性。
为了解决这些限制,端到端(E2E)学习方法,如模仿学习(IL)[9, 23, 24, 39, 57]和强化学习(RL)[8, 27],已被广泛探索。然而,模仿学习(IL)方法容易发生协变量漂移,导致在关键场景中缺乏鲁棒性[32, 42],即使有从错误中学习(LfM)[2]等改进。强化学习(RL)方法虽然在模拟中有效,但在实际应用中面临重大的安全问题并遇到挑战,特别是由于奖励设计和模拟-到-现实的迁移困难 [11]。最近的研究如 DriveCoT [55] 和 DriveInsight [28] 旨在提高可解释性,但通常需要花费大量时间才能在不同场景中有效泛化。
随着大语言模型 (LLM) 和视觉语言模型 (VLM) 的最新进展,研究人员已开始探索它们在自动驾驶中的应用,包括操控任务 [50]、空间落地 [48] 和技能学习 [49]。然而,尽管取得了这些进展 [45、47、56、58],LLM 和 VLM 仍然面临空间落地和实时决策方面的挑战 [60]。平衡安全性和性能仍然是一个关键问题 [54],这个限制它们在复杂的现实世界自动驾驶环境中的更广泛应用。
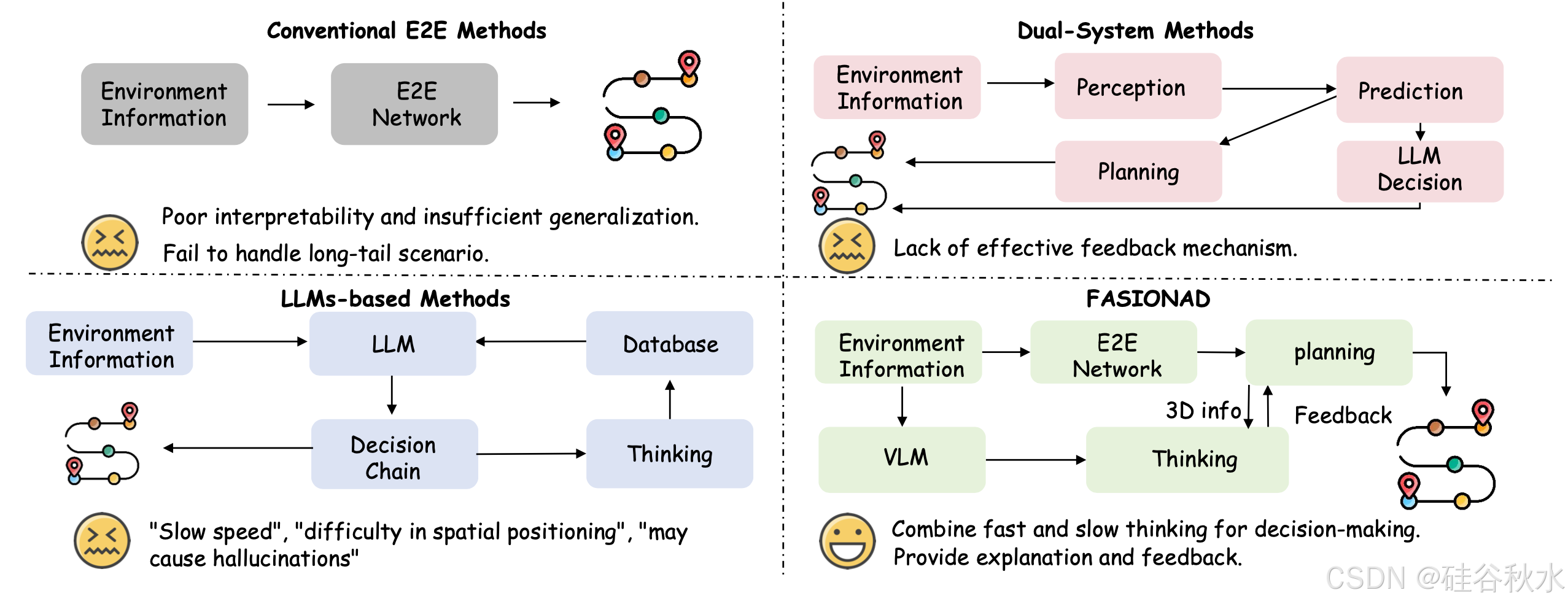
本文提出 FASIONAD,一种自适应反馈框架,无缝集成快速和慢速思维方法。如图所示 FASIONAD 的动机:传统的 E2E 方法在可解释性和泛化方面存在困难,基于 LLM 的方法面临决策速度慢、空间定位问题和潜在的幻觉。双-系统流水线 [51] 使用 LLM 来融合规划,但缺乏安全反馈机制。如图比较不同的自动驾驶运动规划方法,展示该方法能够自适应上下文-觉察决策,提供更好的解释和反馈。
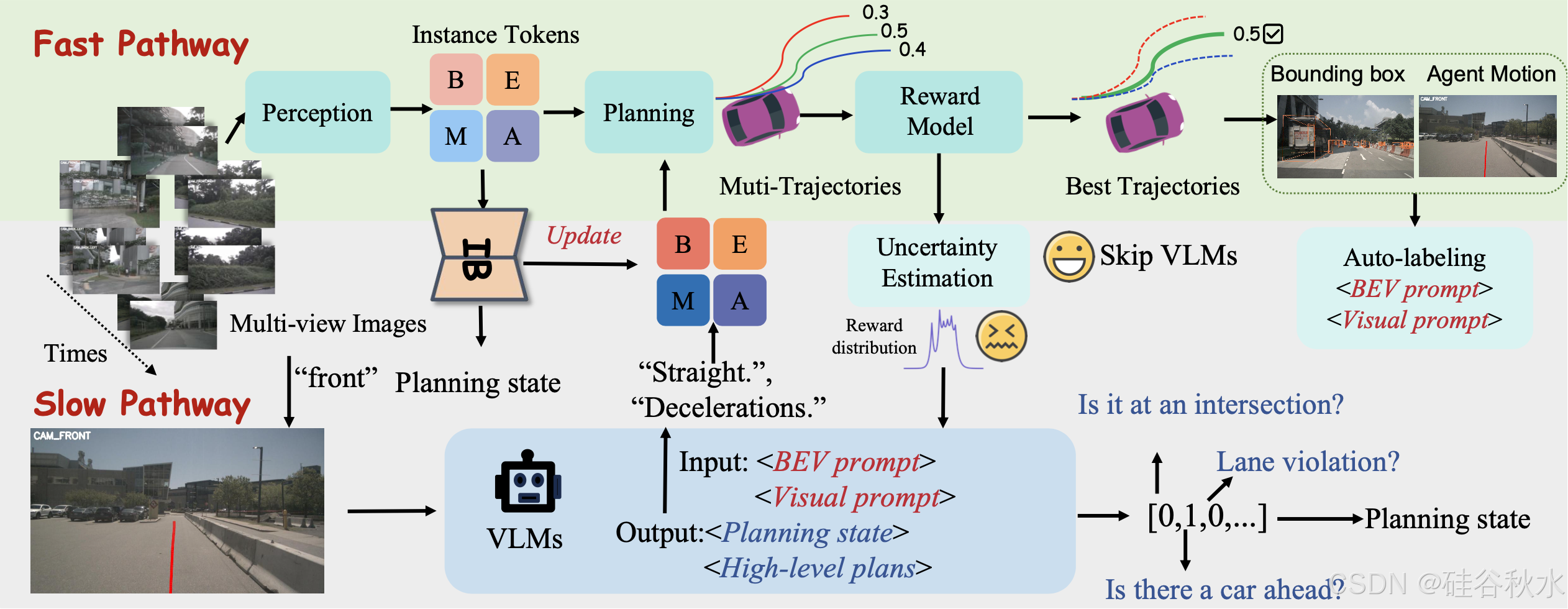
如图所示,FASIONAD 框架采用双-路径架构:快速路径用于快速实时响应,慢速路径用于在不确定或具有挑战性的驾驶场景中进行全面分析和复杂决策。
在快速路径中,给定一组 N 个多视图图像 I_t = {I_1t, I_2t, …, I_Nt} 和高级导航命令 C_t,模型会生成一个航路点序列 W_t = {w_1t, w_2t, …, w_Mt},其中每个航路点 w_it = (x_it, y_it) 表示自车在时间 t + i 的预测鸟瞰图 (BEV) 位置。该路径可以表示为:
FASIONAD(快速路径):(I_t, C_t) → W_t (1)
相比之下,慢速路径仅处理多视图图像 I_t 以生成规划状态 P_t 和高级元动作 A_t,为复杂场景中的决策提供更详细的评估和战略指导。该路径补充快速路径,使其能够在不确定或具有挑战性的条件下进行更深入的分析。慢速路径表示为:
FASIONAD(慢速路径):I_t → (P_t, A_t) (2)
为了协调快速路径和慢速路径,引入基于不确定性的航点预测和轨迹奖励。该机制根据环境背景和复杂性动态,激活任一路径,优化响应性与准确性,从而在需要时实现即时反应和彻底分析。
快速路径
快速通道的第一步是处理传感器输入,以获得对周围环境的高级描述。受人类驾驶员决策过程的启发,将决策所需的信息分为两个层次:低级感知信息(观察到什么?)和高级感知信息(了解观察元素之间的相互作用)。低级感知信息包括有关交通参与者和地图特征的详细信息,而高级感知信息则捕获这些元素之间的相互作用,如图所示。
航点预测和奖励评估
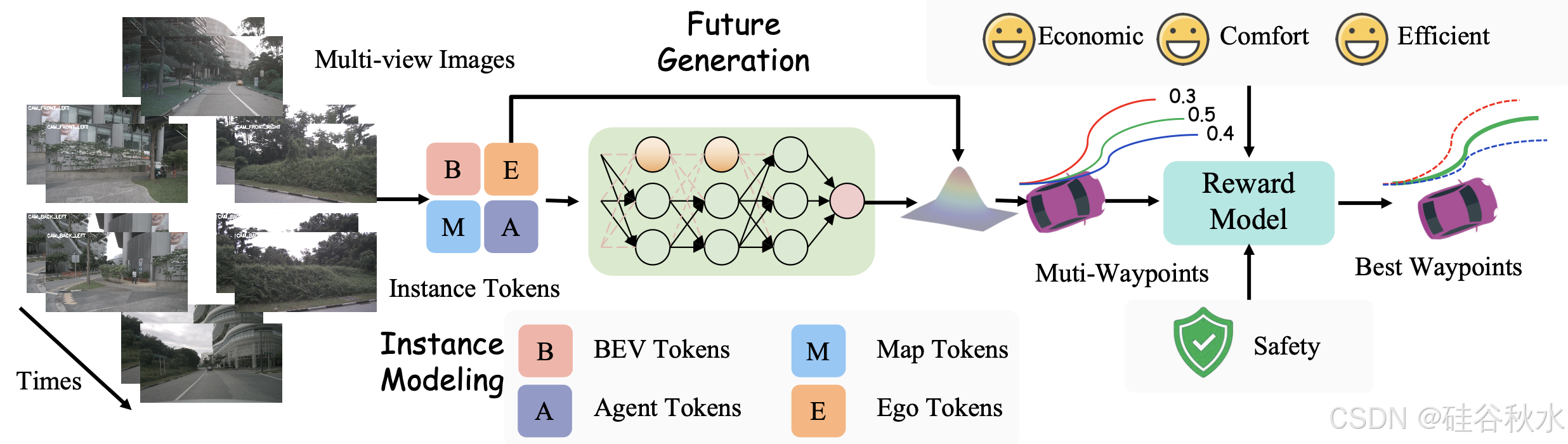
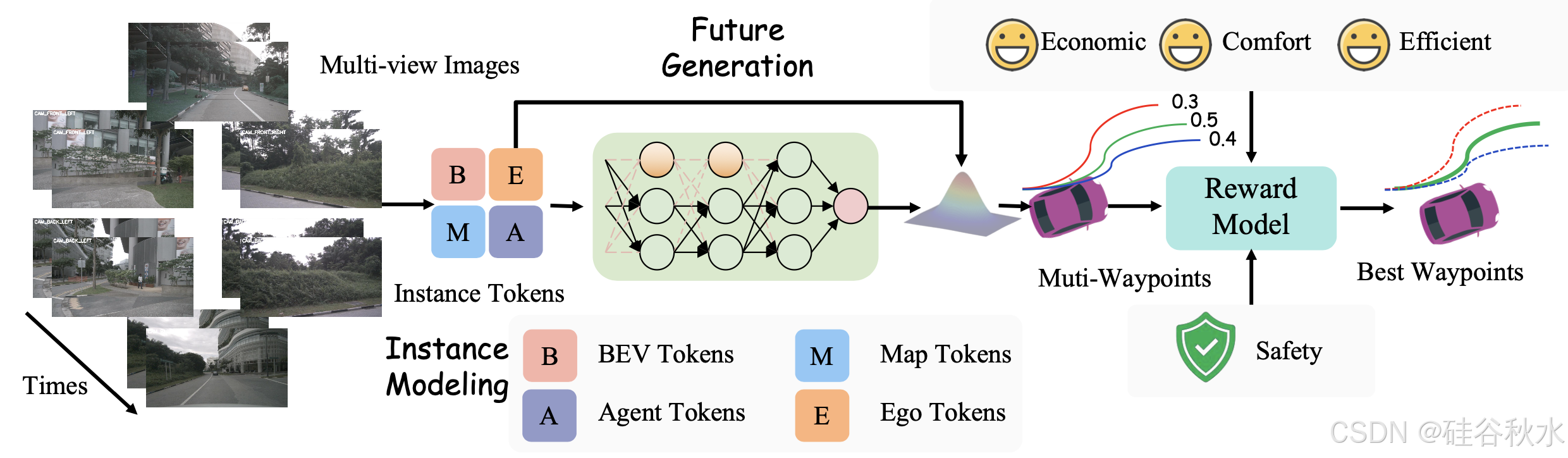
轨迹生成器。轨迹生成器输出航点预测 W = {w_t},每个航点 w_t = (x_t, y_t) 表示 BEV 坐标中的空间位置。为了捕捉交通参与者之间的互动,采用受 GenAD [61] 启发的生成框架,将轨迹预测建模为未来轨迹生成问题。
奖励模型。该模型生成 N_C × N_K 条候选轨迹 T = {T_i},其中每条轨迹 T_i 表示在时间范围 T_s 内的航点序列。这里,N_C 是导航命令的数量,N_K 表示前 K 个采样的多模态轨迹。每个轨迹 T_i 由奖励模型 F_Reward 分配一个奖励 r_i,该模型综合考虑安全性、舒适性、效率和经济性等因素:
F_Reward = α_safety C_safety + α_comfort C_comfort + α_efficiency C_efficiency
+ α_economic C_economic (3)
其中 α_safety ,α_comfort ,α_efficiency, α_economic 是确定每个因素相对重要性的权重。
快速路径损失函数。采用 [24, 61] 中的损失函数设计,它由规划损失 L_plan、辅助 3D 检测损失 L_det 和地图分割损失 L_seg 组成。总损失函数为:
L_fast = λ_plan L_plan + λ_det L_det + λ_seg L_seg (4)
其中 λ_plan、λ_det 和 λ_seg 是平衡辅助损失的权重。
慢速路径
在复杂场景中,准确解释环境因素对于安全决策至关重要。慢速路径模拟类似人类的推理来推断背景并预测未来行动,类似于人类驾驶员。
面向规划的 QA
提出一系列面向决策的问答 (QA) 任务,以促进自动驾驶系统中的类人推理。如图说明 QA 问题的类型。
本研究解决通过提高系统对类人驾驶行为的理解和复制来增强自动驾驶系统稳健性的五个关键方面:
场景分析。这涉及评估环境因素,例如天气条件(例如晴天、雨天、下雪天)、一天中的时间(早上、下午、傍晚、夜晚)、交通密度(轻或重)和道路状况(潮湿、干燥、结冰)。彻底分析这些因素使系统能够解释更广泛的背景,从而影响速度和机动选择等关键决策。
交通标志识别。这项任务侧重于识别和解释各种交通标志,包括交通信号灯、停车标志、让行标志和限速标志。准确的标志识别,对于法规遵从性和安全性至关重要,是类人驾驶行为的基本组成部分。
关键目标识别和行为分析。这涉及识别和分析环境中的关键目标,例如车辆、行人、骑自行车者和动物,并根据过去的动作预测它们未来的行为。准确的识别和行为预测对于预测危险和实现主动决策以避免碰撞至关重要。
规划状态。与规划相关的状态表示为 K 维二进制向量,描述与决策相关的当前环境背景。这种结构化表示通过允许系统优先考虑行动、优化路线和改进决策来支持高级规划。
高级规划和论证。此方面涉及制定路线选择、车道变更和合并机动等动作的高级规划,同时考虑长期目标和约束。通过论证这些决策,系统确保其动作既安全又高效,与总体驾驶目标保持一致。这一组件对于在自主系统中复制类似人类的决策至关重要。
数据收集和自动标记
为了生成这些问答 (QA) 任务,利用快速路径的输出(包括 3D 目标检测框和跟踪轨迹)进行自动注释。此外,利用大型视觉语言模型 (LVLM)(例如 Qwen)来生成与观察场景及其元素紧密相关的描述性 QA。受驾驶决策的认知需求的启发,引入两种类型的提示来增强 QA 生成:视觉提示,有助于以类似于人类感知的方式解释视觉提示和场景元素;BEV 提示,提供自上而下的环境视图,以改善对空间关系和智体交互的理解。
为了解决 VLM 输出中的多变性(可能包含无关或不相关的信息),采用受自然语言处理 (NLP) 中少样本学习启发的正则化策略。但是,与一般的 NLP 应用不同,自动驾驶需要高可靠性和一致性。因此,通过简化过程改进 VLM 输出,确保对快速路径规划器的反馈保持简洁有效,最终支持生成新的、准确的轨迹。
慢速通道流水线可以公式化如下:
P_t, A_t = Φ[E(V^front_t), E(B_t)] (5)
将轨迹视觉提示融入慢速路径规划中。具体来说,将快速路径规划器生成的航点投射到前视摄像头上,从而创建轨迹的视觉表示。这种规划路径的视觉近似,有助于类似人类的推理过程,从而实现更直观的决策评估和修改,从而产生更可靠、更有效的高级规划。
基于车辆的 BEV 坐标系,BEV 提示清晰地描述自车辆与周围智体之间的空间关系和动态交互。
提出一个高级规划编码器,记为 E_A,它将 VLM 中的高级决策转换为元动作特征 A_t。由于高级规划可以分解为结构化的元动作集,编码器 E_A 使用一组可学习的嵌入 e_A 将这些元-动作与它们对应的元-动作特征进行一对一映射,N_A 表示元动作的数量。
传统的 LLM 方法主要依赖于自回归学习。相比之下,该方法将自回归学习与最大似然估计 (MLE) 损失相结合以调整 VLM。为了提高复杂场景中的预测准确性,引入奖励引导的回归损失。与依赖人工反馈进行强化学习微调的 InstructGPT [37] 不同,系统利用自动生成的指导。目标是复制规划状态和高级规划,这些规划可在任务设置中直接访问。因此,将真值定义为 [Y_P_t , Y_A_t]。
由于基于 GPT 模型通常在 token 级应用监督,而整个序列对于回归来说都是有意义的,因此将近端策略优化 (PPO) [43] 与掩码结合起来,以更有效地应用监督。调整损失表示为 L_rvlm,在策略梯度框架内计算为奖励:
L_rvlm = Reward(s1:T_i ) · Φ(sT_i |s^1:T_i−1) (6)
其中 sT_i 表示时间步 T_i 处的预测 token,Reward(s^1:T_i ) 是 Fast Pathway 中航点预测的奖励函数。最终训练损失结合了标准语言损失和奖励引导损失:
L_slow = λ_MLE LMLE + λ_rvlm L_rvlm (7)
快慢融合自动驾驶
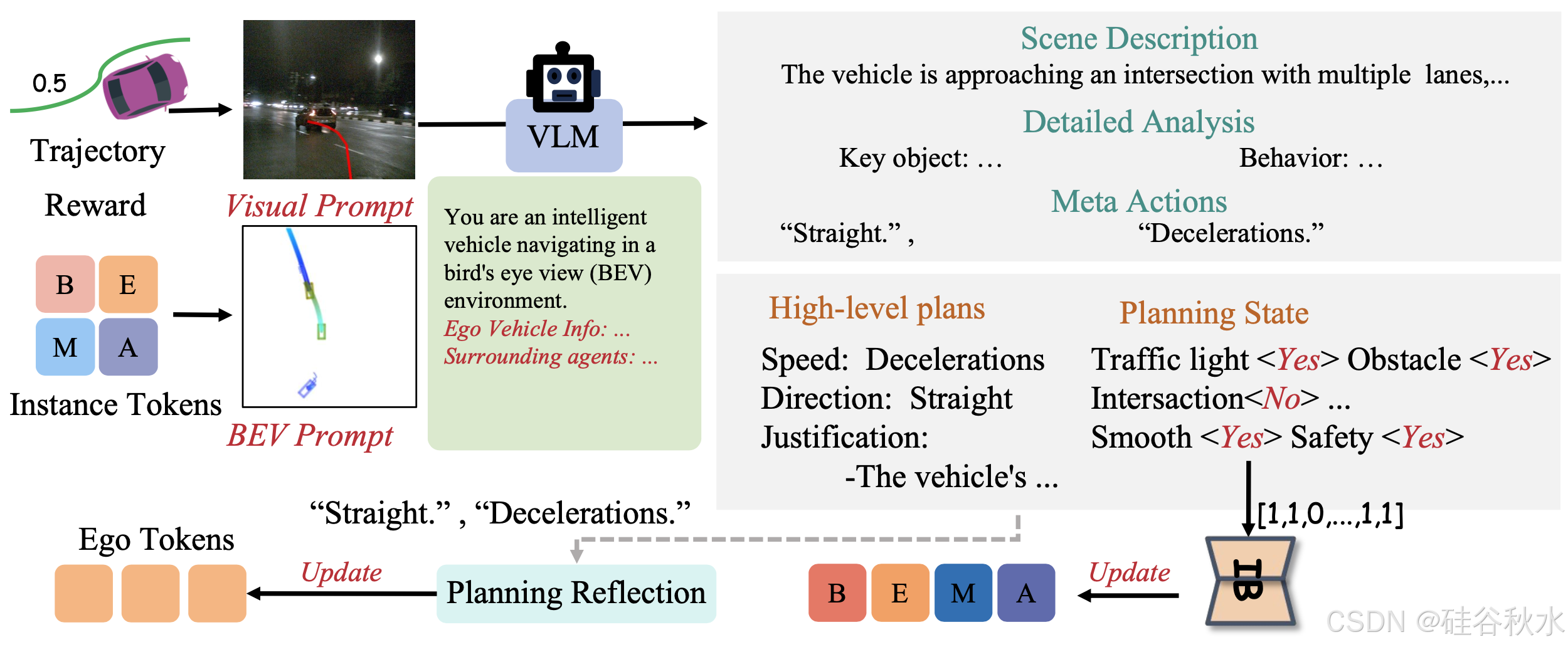
如图所示自适应反馈机制处理双重输入:轨迹-生成的图像,和从实例 tokens 派生的 BEV 提示,两者都输入到 VLM 中。
不确定性估计和决策机制
为了有效地驾驭动态和不可预测的环境,估计航点预测中的不确定性至关重要,因为它允许系统根据预测可靠性调整其决策。为了处理航点预测中的异常值和模型不确定性,采用拉普拉斯分布:

该分布的重尾使其对异常值具有鲁棒性,这在动态驾驶环境中非常有利。
拉普拉斯分布的重尾和尖峰使其对异常值具有鲁棒性,并且可有效估计动态驾驶环境中的不确定性。根据奖励(R)和估计的不确定性,系统选择用于瞬时导航的快速路径(当奖励超过阈值且不确定性较低时),或用于详细分析的慢速路径。
信息瓶颈反馈
驾驶环境通常包含大量无关或嘈杂的信息,这些信息对规划没有帮助。为了解决这个问题,应用信息瓶颈原理[18]来仅提取与决策相关的信息。这种方法可确保模型优先考虑导航的关键特征,从而有效地最大限度地减少无关数据的影响。
为了将实例-觉察特征 z 与 y_t 对齐,用 MLP f_MLP 将 z 映射到一维向量 y_i。知识蒸馏过程最小化以下目标:

其中 q_d(y_t|y_i) 是给定 y_i 的 VLM 派生向量 y_t 概率分布,q_e(y_i | z_current) 对当前状态的实例-觉察特征进行编码。这里,p(z) 是 z 上的先验分布,β 是正则化参数。
反馈融合机制
慢速路径由奖励信号和不确定性激活,可以选择性地深入分析基本 VLM 派生特征。集成通过可学习嵌入 e_A 和自我 token e_ego 之间的交叉注意进行,其中 e_ego 将 e_A 作为 K-V 对进行查询。这歌捕获上下文依赖关系,并将生成的融合状态输入到快速路径中进行轨迹规划,模仿人类在复杂驾驶场景中的决策。
实验设置如下。
对 FASIONAD 的评估涵盖开环和闭环性能指标。对于开环评估,用 nuScenes 数据集,该数据集提供来自城市驾驶场景的全面注释数据。此评估侧重于通过 L2 距离和碰撞率指标来衡量策略与专家演示的相似性。由于这些开环测量的计算效率和结果一致性,在消融研究中优先考虑它们。闭环评估采用 CARLA Closed-loop Town05 Short Benchmark,其特点是具有挑战性的场景,包括狭窄的街道、密集的交通和频繁的交叉路口。主要性能指标是驾驶分数 (DS),包括路线完成度 (RC)-违规分数的乘积和路线完成度本身。为了确保与现有方法的公平比较,围绕基于学习的策略实施基于规则的包裹器,遵循基准评估中的标准做法。其有助于最大限度地减少测试期间的违规行为。
训练过程分为三个阶段:(1)训练快速路径以生成合理的轨迹和强大的奖励函数,(2)微调视觉语言模型(VLM)以输出结构化向量表示,以及(3)联合训练快速和慢速路径以协调反馈并提高复杂场景下的性能。
第一阶段,重点学习稳健的轨迹生成,并设计评估安全性、效率和舒适度的奖励模型。
第二阶段,专注于微调视觉语言模型 (VLM) 以生成结构化矢量表示,增强慢速通路为决策提供高质量反馈的能力。
最后一个阶段,重点是将慢速路径的基于推理反馈整合到快速路径的实时轨迹生成中。此过程确保系统将快速路径的效率与慢速路径的上下文推理和适应性相结合,协调它们的输出以提高整体性能。
快速路径的实现细节如下。
采用 ResNet50[20] 作为主干网络来提取图像特征。将分辨率为 640 × 360 的图像作为输入,并使用 200 × 200 的 BEV 表示来感知周围场景。为了公平比较,基本上使用与 VAD-tiny[24] 相同的超参。将 BEV token、地图 token 和智体 token 的数量分别固定为 100 × 100,100 和 300。每个地图 token 是包含 20 个点的 tokens,以表示 BEV 空间中的地图点。将每个 BEV、点、智体、自我和实例 tokens 的隐藏维度设置为 256。在奖励函数中设置 α_safety = 2、α_comfort = α_efficiency = α_economic = 1。
对于训练,将损失平衡因子设置为 1,并使用 AdamW[35] 优化器和余弦学习率调度器[34]。将初始学习率设置为 2 × 10-4,权重衰减为 0.01。默认情况下,用 8 个 NVIDIA Tesla A100 GPU 对 FASIONAD 进行 30 个 epoch 的训练,总批次大小为 8。
相关文章:
FASIONAD:自适应反馈的类人自动驾驶中快速和慢速思维融合系统
24年11月来自清华、早稻田大学、明尼苏达大学、多伦多大学、厦门大学马来西亚分校、电子科大(成都)、智平方科技和河南润泰数字科技的论文“FASIONAD : FAst and Slow FusION Thinking Systems for Human-Like Autonomous Driving with Adaptive Feedbac…...

Redis7——基础篇(八)
前言:此篇文章系本人学习过程中记录下来的笔记,里面难免会有不少欠缺的地方,诚心期待大家多多给予指教。 基础篇: Redis(一)Redis(二)Redis(三)Redis&#x…...

nvm安装
1.下载安装包 从官网下载https://github.com/nvm-sh/nvm/releases 这里下的是nvm-0.40.1.tar.gz 2.解压 tar -zxvf nvm-0.40.1.tar.gz 3. 修改配置文件 vi ~/.bashrc 在最后一行添加如下内容 export NVM_DIR"/usr/local/nvm-0.40.1"[ -s "$NVM…...

基于vue框架的游戏博客网站设计iw282(程序+源码+数据库+调试部署+开发环境)带论文文档1万字以上,文末可获取,系统界面在最后面。
系统程序文件列表 项目功能:用户,博客信息,资源共享,游戏视频,游戏照片 开题报告内容 基于FlaskVue框架的游戏博客网站设计开题报告 一、项目背景与意义 随着互联网技术的飞速发展和游戏产业的不断壮大,游戏玩家对游戏资讯、攻略、评测等内容的需求日…...

spring MVC执行流程
详细的项目结构 src ├── main │ ├── java │ │ ├── com.example │ │ │ ├── config │ │ │ │ └── SpringMvcInitializer.java // 配置 DispatcherServlet │ │ │ │ └── SpringConfig.java // Sprin…...

递归遍历目录 和 普通文件的复制 [Java EE]
递归遍历目录 首先 先列出当前目录所包含的内容 File[] files currentDir.listFiles();if (files null || files.length 0) {// 若是空目录或非法目录, 则直接返回return;} 然后 遍历列出的文件, 分情况两种讨论 for (File f: files) {// 加个日志, 方便查看程序执行情…...

如何在docker上部署java服务
目录结构 首先 Dockerfile FROM bladex/alpine-java:openjdk17_cn_slimMAINTAINER admin@rsz.comENV TZ=Asia/ShanghaiRUN ln -sf /usr/share/zoneinfo/$TZ /etc/localtime && echo $TZ > /etc/timezoneRUN mkdir -p /xhWORKDIR /xhEXPOSE 8106ADD ./blade-system.…...

Machine Learning 初探
前置知识 pandas 读取文件:read_csv查看信息 describe:查看整体信息,包括每列的平均值、最大最小值、标准差等head:输出头部几行数据columns:输出所有列名loc:查询数据,或是根据索引取对应的数…...

GESP2024年12月认证C++三级( 第三部分编程题(1)数字替换)
参考程序: #include <iostream> #include <vector> #include <algorithm> using namespace std; int a[100010]; // 定义一个数组a,用于存储序列A,数组大小为100010 int main() {int n, k; // 定义变量n和k,…...

IDEA-插件开发踩坑记录-第六坑-UAST依赖问题
背景 简要说明: UAST – Unified Abstract Syntax Tree UAST (Unified Abstract Syntax Tree) is an abstraction layer on the PSI of different programming languages targeting the JVM (Java Virtual Machine). It provides a unified API for working with co…...

单片机总结【GPIO/TIM/IIC/SPI/UART】
一、GPIO 1、概念 通用输入输出口;开发者可以根据自己的需求将其配置为输入或输出模式,以实现与外部设备进行数据交互、控制外部设备等功能。简单来说,GPIO 就像是计算机或微控制器与外部世界沟通的 “桥梁”。 2、工作模式 工作模式性质特…...

信号和槽
connect(信号发送者,发送的信号,信号接收者,信号的处理); 信号函数和槽函数的参数必须是一样的,但信号的参数可以多余槽函数的参数(前面的参数类型必须一致) 是控件和控件间的信号传递,这两个…...

Window下Redis的安装和部署详细图文教程(Redis的安装和可视化工具的使用)
文章目录 Redis下载地址:一、zip压缩包方式下载安装 1、下载Redis压缩包2、解压到文件夹3、启动Redis服务4、打开Redis客户端进行连接5、使用一些基础操作来测试 二、msi安装包方式下载安装 1、下载Redis安装包2、进行安装3、进行配置4、启动服务5、测试能否正常工…...

1.2.3 使用Spring Initializr方式构建Spring Boot项目
本实战概述介绍了如何使用Spring Initializr创建Spring Boot项目,并进行基本配置。首先,通过Spring Initializr生成项目骨架,然后创建控制器HelloController,定义处理GET请求的方法hello,返回HTML字符串。接着…...

数据可视化02-PCA降维
一、PCA PCA做什么?找坐标系。 目标?二维降到一维,信息保留最多。 怎么样最好?数据分布最分散的方向(方差最大),作为主成分(坐标轴)。 二、怎么找主成分? …...

大连指令数据集的创建--数据收集与预处理_02
1.去哪儿爬虫 编程语言:Python爬虫框架:Selenium(用于浏览器自动化)解析库:BeautifulSoup(用于解析HTML) 2.爬虫策略 目标网站:去哪儿(https://travel.qunar.com/trav…...

xr-frame 3D Marker识别,扬州古牌坊 3D识别技术稳定调研
目录 识别物体规范 3D Marker 识别目标文件 map 生成 生成任务状态解析 服务耗时: 对传入的视频有如下要求: 对传入的视频建议: 识别物体规范 为提高Marker质量,保证算法识别效果,可参考Marker规范文档 Marker规…...

【网络安全 | 漏洞挖掘】利用文件上传功能的 IDOR 和 XSS 劫持会话
未经许可,不得转载。 本文涉及漏洞均已修复。 文章目录 前言正文前言 想象这样一个场景:一个专门处理敏感文档的平台,如保险理赔或身份验证系统,却因一个设计疏漏而成为攻击者的“金矿”。在对某个保险门户的文件上传功能进行测试时,我意外发现了一个可导致大规模账户接管…...

达梦数据库系列之安装及Mysql数据迁移
达梦数据库系列之安装及Mysql数据迁移 1. 达梦数据库1.1 简介1.2 Docker安装达梦1.2.1 默认密码查询1.2.2 docker启动指定密码 1.3 达梦数据库连接工具1.3.1 快捷键 2 Mysql数据库迁移至达梦2.1 使用SQLark进行数据迁移 1. 达梦数据库 1.1 简介 DM8是达梦公司在总结DM系列产品…...

FS800DTU联动OneNET平台数据可视化View
目录 1 前言 2 环境搭建 2.1 硬件准备 2.2 软件环境 2.3 硬件连接 3 注册OneNET云平台并建立物模型 3.1 参数获取 3.2 连接OneNET 3.3上报数据 4 数据可视化View 4.1 用户信息获取 4.2 启用数据可视化View 4.3 创建项目 4.4 编辑项目 4.5 新增数据源 4.6 数据过滤器配置 4.6 项…...

2026照片去水印免费软件app详细教程:保姆级指南,一看就会
你是不是也遇到过这些尴尬时刻——辛辛苦苦刷到一张绝美壁纸,保存下来却发现右下角赫然挂着平台水印,当头像嫌脏、做素材嫌low;想从自己发的抖音视频里截一张封面图,结果水印刚好糊在脸上;又或者,老板甩过来…...

昇腾CANN torchtitan-npu 3D 并行实战:DP+TP+PP 组合策略与 Pipeline Bubble 消除
175B 参数的大模型不能放在一张 NPU 上——需要分布式。三种并行策略各有优劣:数据并行(DP)简单但显存不降、张量并行(TP)通信密集但显存降得最多、流水线并行(PP)显存也降但有 bubbleÿ…...

突破下载瓶颈:百度网盘Mac版SVIP加速完全指南
突破下载瓶颈:百度网盘Mac版SVIP加速完全指南 【免费下载链接】BaiduNetdiskPlugin-macOS For macOS.百度网盘 破解SVIP、下载速度限制~ 项目地址: https://gitcode.com/gh_mirrors/ba/BaiduNetdiskPlugin-macOS 你是否曾因百度网盘Mac版的龟速下载而焦躁&am…...

如何免费将PPTX转为HTML?纯JavaScript终极解决方案完整指南
如何免费将PPTX转为HTML?纯JavaScript终极解决方案完整指南 【免费下载链接】PPTX2HTML Convert pptx file to HTML by using pure javascript 项目地址: https://gitcode.com/gh_mirrors/pp/PPTX2HTML 在数字化办公和在线教育的时代,你是否经常需…...

利用 TaoToken 统一管理多个 AI 项目的 API 密钥与用量
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用 TaoToken 统一管理多个 AI 项目的 API 密钥与用量 当你手头同时运行着多个 AI 应用或实验项目时,管理分散的 API …...

Node.js 服务如何无缝接入 Taotoken 并管理多个模型的 API 调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Node.js 服务如何无缝接入 Taotoken 并管理多个模型的 API 调用 在构建现代 Node.js 后端服务时,集成多种大语言模型能…...

高效解决幻兽帕鲁存档迁移难题:专业GUID替换工具实战指南
高效解决幻兽帕鲁存档迁移难题:专业GUID替换工具实战指南 【免费下载链接】palworld-host-save-fix Fixes the bug which forces a player to create a new character when they already have a save. Useful for migrating maps from co-op to dedicated servers a…...

BG3 Mod Manager:轻松管理《博德之门3》模组的高效工具
BG3 Mod Manager:轻松管理《博德之门3》模组的高效工具 【免费下载链接】BG3ModManager A mod manager for Baldurs Gate 3. This is the only official source! 项目地址: https://gitcode.com/gh_mirrors/bg/BG3ModManager BG3 Mod Manager 是一款专为《博…...

Thorium浏览器深度解析:如何通过编译优化实现300%性能提升的技术革命
Thorium浏览器深度解析:如何通过编译优化实现300%性能提升的技术革命 【免费下载链接】thorium Chromium fork named after radioactive element No. 90. Source code and Linux releases. Windows/MacOS/ARM builds served in different repos, links are towards …...

Windows苹果设备驱动一键安装:告别iTunes臃肿体验的完整解决方案
Windows苹果设备驱动一键安装:告别iTunes臃肿体验的完整解决方案 【免费下载链接】Apple-Mobile-Drivers-Installer Powershell script to easily install Apple USB and Mobile Device Ethernet (USB Tethering) drivers on Windows! 项目地址: https://gitcode.…...