kinova机械臂绿色灯一闪一闪及刷机方法
一、背景
实验室有两个kinova mico机械臂,但经常出现操纵杆上的绿色灯一闪一闪的,导致无法使用操纵杆或ROS进行控制,下面给出官方的教程以及所需要的FS 0CPP 0008_6.2.5_mico_6dof.hex文件。
重要的东西写在前面:
a、如果出现操纵杆上的绿色灯一闪一闪的问题,先尝试断开所有连接线,重新启动机械臂,如果不行,再尝试刷机,因为刷机还是有些麻烦的。
b、刷机可以直接在windows系统下
c、文件路径:D:\DLUT\manipulator programming\kinovaResources
d、切记:文件夹路径不要出现中文,防止更新固件时失败
二、解决kinova机械臂灯一闪一闪问题
1、下载最新版本的DevelopmentCenter
网址:https://www.kinovarobotics.com/product/gen2-robots
选择 Gen2 SDK v1.5.1
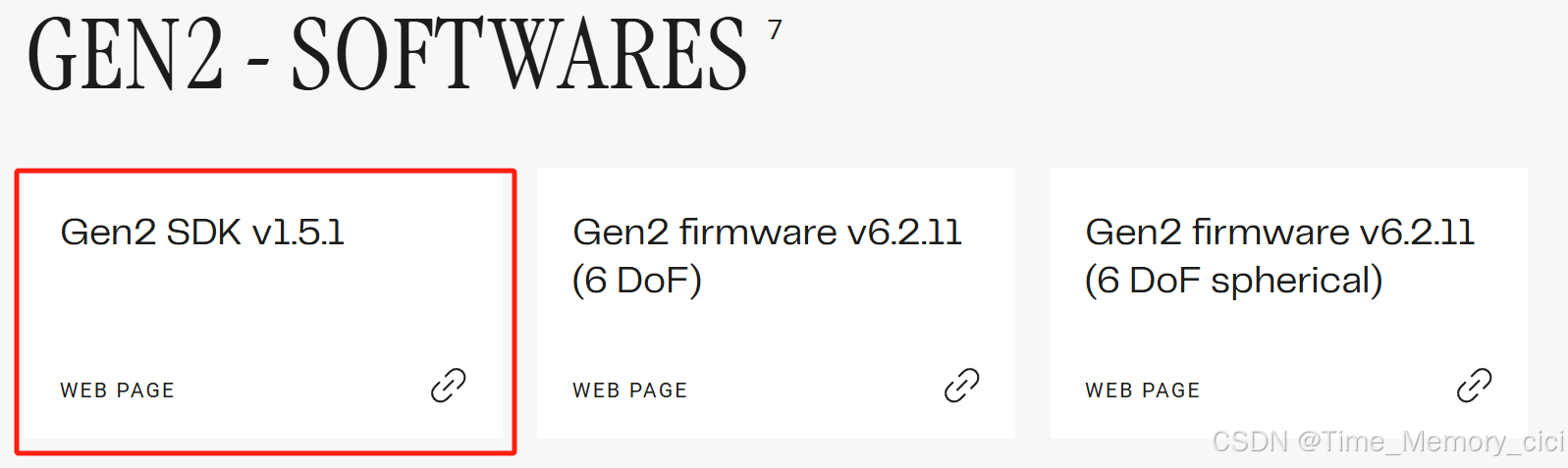
下载的文件为:PS 0000 0009_1.5.1.zip
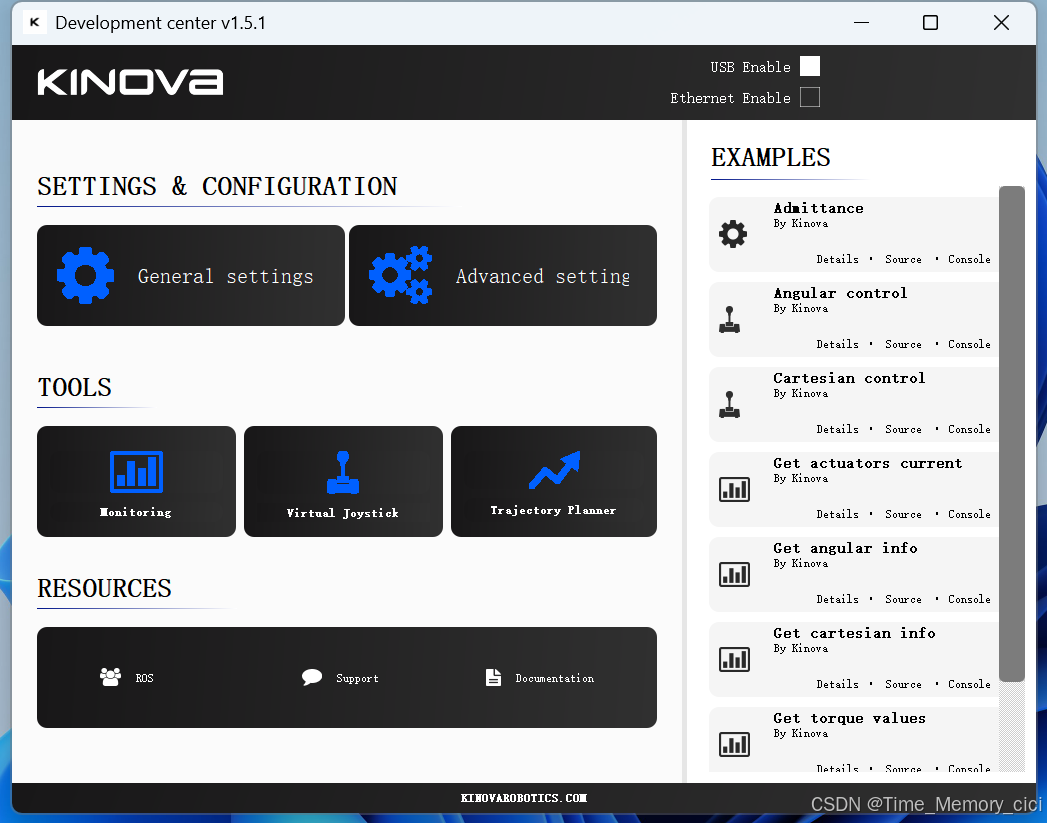
解压后,点击windows文件夹下的SDK_GEN2_1_5_1_x86.exe,然后就可成功安装DevelopmentCenter以及TorqueConsole,虽然用不到TorqueConsole。

2、关闭机械臂电源并使操纵杆连接器中的2个引脚短路

随便找个铜线、铝线都可以,只要能导电就行,我从实验室剪了一段铜线接上去了~~

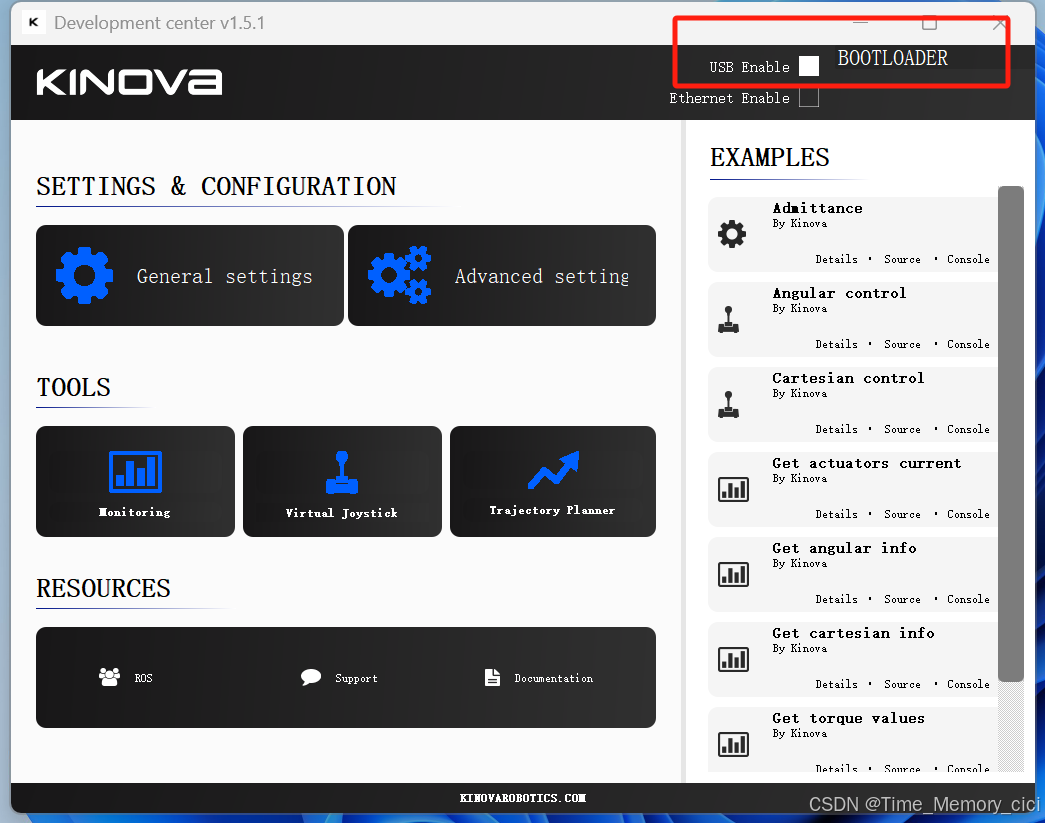
3、通过USB将机械臂和电脑相连,打开机械臂电源并启动DevelopmentCenter。
·在DevelopmentCenter右上角,应显示“BOOTLOADER”字样。
·单击“General settings”并转到“update”选项卡。
·点击“Browse”,找到FS 0CPP 0008_6.2.5_mico_6dof.hex文件,我的.hex文件路径为:D:\DLUT\manipulator programming\kinovaResources
·单击update(此步骤最多需要2分钟)
·更新完成后,提示Firmware Update completed successfully,关闭机械臂电源,并移除操纵杆引脚的短路。
·机械臂上电,此时操纵杆的绿色等不再闪烁,问题成功解决,完美!!!

三、资料记录
1、hex文件移动硬盘有备份,文件路径为:F:\2联想R7000\DLUT\机械臂\kinova\FS 0CPP 0008_6.2.5_mico_6dof.hex
2、祖传解决kinova一闪一闪解决办法:
Kinova GEN 2 MICO机械臂一闪一闪的解决办法:
1. 备注:(刷机失败可能的原因)1.hex文件路径为中文;2.Develpment Center可能不是最新版本,官网下载如下图所示2. 然后安装 “Development Center” (SDK_GEN2_1_5_1_x86.exe),链接https://www.kinovarobotics.com/en/resources/technical-resources-library 。待完成后,如果usb驱动没问题,直接跳转到步骤5,否则从SDK 1.5.1中找到 (步骤3中提到的usb驱动包)重新安装
3. 下载机械臂的usb驱动包,Kinova-Jaco-Usb-Driver-(usblib)-Installer.exe
4. 安装上面的usb驱动包
5. 按照Development center说明书操作(两个口pin短路),->Update->Browse->添加hex文件,最后Update一下,等2分钟
3、kinova管网刷机教程:
You are facing a boot loader issue since you cannot control the arm with either the joystick or ROS and the green lights are flashing on your jostick.
You will need the latest version of Development Center available on our website. Here is the link:
https://www.kinovarobotics.com/en/knowledge-hub/all-kinova-products
and choose "KINOVA® SDK GEN 2 Ultra lightweight robot 1.5.1".
Follow the release notes (RN) document to install the software properly.
Power-down the arm and short-circuit the 2 pins in the joystick connector as shown in the picture below.Connect the arm to the computer via USB, power-on the arm and launch Development Center.
· In the top right corner, the mention "BOOTLOADER" should be displayed.
· Click on General Settings and go to the Update tab.
· Click on Browse and choose the firmware version attached below for your mico 6DOF robot that you can download with this link
· Click on Update (this step can take up to 2 minutes)
· Once the update is completed, power down the arm and remove the short circuit from the joystick pins.
· Power on the arm.
You should now be able to control the arm using the joystick. Now please make sure the developement center is closed and try to do the following two commands in your terminal :
1)roslaunch kinova_bringup kinova_robot.launch kinova_robotType:=m1n6s300
2)roslaunch m1n6s300_moveit_config m1n6s300_demo.launch
If there is still an error when you launch one of these two commands please let me know and I will help you :)相关文章:
kinova机械臂绿色灯一闪一闪及刷机方法
一、背景 实验室有两个kinova mico机械臂,但经常出现操纵杆上的绿色灯一闪一闪的,导致无法使用操纵杆或ROS进行控制,下面给出官方的教程以及所需要的FS 0CPP 0008_6.2.5_mico_6dof.hex文件。 重要的东西写在前面: a、如果出现操…...

第16天:C++多线程完全指南 - 从基础到现代并发编程
第16天:C多线程完全指南 - 从基础到现代并发编程 一、多线程基础概念 1. 线程创建与管理(C11) #include <iostream> #include <thread>void hello() {std::cout << "Hello from thread " << std::this_…...

中科大计算机网络原理 1.5 Internt结构和ISP
一、互联网的层次化架构 覆盖范围分层 主干网(Tier-1级) 国家级或行业级核心网络,承担跨区域数据传输和全球互联功能。例如中国的四大主干网(ChinaNET、CERNET等)以及跨国运营商(如AT&T、Deuts…...

Windows安装sql server2017
看了下官网的文档,似乎只有ubuntu18.04可以安装,其他debian系的都不行,还有通过docker的方式安装的。 双击进入下载的ISO,点击执行可执行文件,并选择“是” 不要勾选 警告而已,不必理会 至少勾选这两…...
)
计算机网络之传输层(tcp协议)
一、TCP协议的特点 面向连接:TCP使用面向连接的通信模式,通信双方需要先建立连接,然后才能进行数据的传输。连接建立过程采用三次握手的方式。 可靠性:TCP提供可靠的数据传输服务,确保数据的完整性、有序性和正确性。…...

从零到一:如何用阿里云百炼和火山引擎搭建专属 AI 助手(DeepSeek)?
本文首发:从零到一:如何用阿里云百炼和火山引擎搭建专属 AI 助手(DeepSeek)? 阿里云百炼和火山引擎都推出了免费的 DeepSeek 模型体验额度,今天我和大家一起搭建一个本地的专属 AI 助手。 阿里云百炼为 …...

Open3D解决SceneWidget加入布局中消失的问题
Open3D解决SceneWidget加入布局中消失的问题 Open3D解决SceneWidget加入布局中消失的问题1. 问题2. 问题代码3. 解决 Open3D解决SceneWidget加入布局中消失的问题 1. 问题 把SceneWidget加到布局管理其中图形可以展示出来,但是鼠标点击就消失了。 stackoverflow上已…...

计算机毕业设计Python+DeepSeek-R1大模型游戏推荐系统 Steam游戏推荐系统 游戏可视化 游戏数据分析(源码+文档+PPT+讲解)
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 作者简介:Java领…...

Linux笔记---缓冲区
1. 什么是缓冲区 在计算机系统中,缓冲区(Buffer) 是一种临时存储数据的区域,主要用于协调不同速度或不同时序的组件之间的数据传输,以提高效率并减少资源冲突。它是系统设计中的重要概念,尤其在I/O操作、网…...

如何流畅访问github
1.传输数据原理 本地计算机通过本地网接入运营骨干网,经过DNS域名解析,将输入的字符解析为要连接的真实IP地址,服务器返还一个数据包(github)给计算机 2.原因 DNS域名污染-DNS解析出现问题,导致访问一个不存在的服务器 3.解决…...

java基础+面向对象
Java基础语法 CMD命令 cls 清屏 cd 目录进入文件 cd… 退回 dir 查看当前目录所有文件 E:进入E盘 exit 退出 环境变量就是不用去专门的盘符去找,直接去环境变量里找到文件 语言优势 编译型语言c: 整体翻译 解释型语言python&#x…...

Linux 检测内存泄漏方法总结
文章目录 strace检测asan内存检测linux下gperf工具(tcmalloc)检查C/C代码内存泄露问题参考 strace检测 (1)启动程序 (2) strace -f -p <PID> -tt -e brk,mmap,mmap2,munmapbrk 变大 → 说明堆增长…...

本地部署deepseek大模型后使用c# winform调用(可离线)
介于最近deepseek的大火,我就在想能不能用winform也玩一玩本地部署,于是经过查阅资料,然后了解到ollama部署deepseek,最后用ollama sharp NUGet包来实现winform调用ollama 部署的deepseek。 本项目使用Vs2022和.net 8.0开发,ollam…...

Python----数据分析(Numpy:安装,数组创建,切片和索引,数组的属性,数据类型,数组形状,数组的运算,基本函数)
一、 Numpy库简介 1.1、概念 NumPy(Numerical Python)是一个开源的Python科学计算库,旨在为Python提供 高性能的多维数组对象和一系列工具。NumPy数组是Python数据分析的基础,许多 其他的数据处理库(如Pandas、SciPy)都依赖于Num…...

Leetcode-最大矩形(单调栈)
一、题目描述 给定一个仅包含 0 和 1 、大小为 rows x cols 的二维二进制矩阵,找出只包含 1 的最大矩形,并返回其面积。 输入:matrix [["1","0","1","0","0"],["1","0&…...

域内委派维权
为某个服务账户配置 krbtgt 用户的非约束性委派或基于资源的约束性委派。这里我的 krbtgt 的基于资源约束性委派我利用不了,所以使用的是域控的机器账户 dc01$ 进行维权。 抓取所有 hash。 mimikatz.exe "privilege::debug" "lsadump::dcsync /doma…...

leetcode---LCR 140.训练计划
给定一个头节点为 head 的链表用于记录一系列核心肌群训练项目编号,请查找并返回倒数第 cnt 个训练项目编号。 示例 1: 输入:head [2,4,7,8], cnt 1 输出:8 提示: 1 < head.length < 1000 < head[i] <…...
整理)
Linux基础 -- ARM 32位常用机器码(指令)整理
ARM 32位常用机器码(指令)整理 1. 数据处理指令(运算、逻辑、比较) 指令含义示例备注MOV赋值(寄存器传输)MOV R0, R1直接将 R1 复制到 R0MVN取反MVN R0, R1R0 ~R1ADD加法ADD R0, R1, R2R0 R1 R2ADC带进…...

内存中的缓存区
在 Java 的 I/O 流设计中,BufferedInputStream 和 BufferedOutputStream 的“缓冲区”是 内存中的缓存区(具体是 JVM 堆内存的一部分),但它们的作用是优化数据的传输效率,并不是直接操作硬盘和内存之间的缓存。以下是详…...

基于 Spring Boot 的 +Vue“宠物咖啡馆平台” 系统的设计与实现
大家好,今天要和大家聊的是一款基于 Spring Boot 的 “宠物咖啡馆平台” 系统的设计与实现。项目源码以及部署相关事宜请联系我,文末附上联系方式。 项目简介 基于 Spring Boot 的 “宠物咖啡馆平台” 系统设计与实现的主要使用者分为 管理员、用户 和…...

DLSS Swapper终极指南:如何一键管理游戏DLSS版本提升50%性能
DLSS Swapper终极指南:如何一键管理游戏DLSS版本提升50%性能 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper 你是否曾经因为游戏自带的DLSS版本过时而感到困扰?当最新的DLSS 3.5版本发布&#x…...

熬夜赶论文效率低到哭?学长安利这几个AI论文写作软件
熬夜赶论文效率低到哭?选题没思路、大纲难搭建、初稿写不顺、文献找不全、润色没方向、降重费时间、格式不规范——这些论文写作的痛点,其实都可以通过用对AI工具、走对流程来解决。资深教授普遍推荐:千笔AI(中文全流程首选&#…...

数字主权还是数字枷锁?德国eIDAS钱包的Apple/Google账户依赖之困
数字主权还是数字枷锁?德国eIDAS钱包的Apple/Google账户依赖之困 2025年的深秋,一则来自德国联邦内政部(BMI)的技术文档在开发者社区引发了轩然大波。文档明确指出,即将在德国落地的eIDAS钱包——这个承载着欧盟数字身…...

AI Agent 在工具调用失败时,如何设计一个智能的降级策略?
这个问题挺关键的,工具调用失败在 AI Agent 系统里是常态,不是异常。核心思路是——先分类,再分级,最后兜底。 我之前做 Agent 编排系统的时候,工具调用成功率大概在 85% 左右,剩下 15% 都得靠降级策略兜住。如果没设计好,整个 Agent 就会频繁报错,用户体验很差。 第一步:错误…...

QQ音乐解码工具qmcdump:轻松解密加密音频文件的完整指南
QQ音乐解码工具qmcdump:轻松解密加密音频文件的完整指南 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 你是…...

JMeter生产级接口测试实战:从环境配置到链路稳定性保障
1. 这不是又一篇“点点点”的JMeter入门指南,而是你真正能跑通、调得稳、查得清的接口测试实战手册很多人点开“JMeter教程”四个字,心里想的是:“不就是录个脚本、加个线程组、看个聚合报告吗?”——结果一上手,HTTP请…...
)
Linux 文本三剑客组合实战(grep + sed + awk)
前言 Linux 文本处理三剑客: grep:过滤、筛选行(抓出想要的内容)sed:替换、删除、修改文本(批量改内容)awk:按列截取、统计、计算(取字段、做统计) 真正工…...

DVWA靶场实战避坑指南:Docker环境搭建与四层安全等级解析
1. 这不是“又一个DVWA教程”,而是一份能让你在真实渗透测试中少走三周弯路的靶场操作手册很多人第一次接触渗透测试,打开浏览器输入http://192.168.1.10/dvwa,看到那个灰扑扑的登录页,就以为自己已经站在了红队门口。结果刚点开S…...

Leslie矩阵建模:从种群动力学到捕食竞争与机器学习拟合
1. 项目概述:从矩阵视角看种群兴衰在生态学和种群生物学里,我们总想预测未来:这片森林里的鹿群十年后会怎样?引入狼群后,整个系统会稳定还是崩溃?传统微分方程模型(比如经典的Lotka-Volterra方程…...
)
告别虚拟机!手把手教你用U盘给新电脑装Win11+UOS 1060双系统(保姆级分区教程)
告别虚拟机!手把手教你用U盘给新电脑装Win11UOS 1060双系统(保姆级分区教程)刚拿到新电脑的开发者常面临一个两难选择:既需要Windows环境运行专业软件,又得适配国产操作系统完成兼容性测试。虚拟机虽然方便,…...