opencv 模板匹配方法汇总
在OpenCV中,模板匹配是一种在较大图像中查找特定模板图像位置的技术。OpenCV提供了多种模板匹配方法,通过cv2.matchTemplate函数实现,该函数支持的匹配方式主要有以下6种,下面详细介绍每种方法的原理、特点和适用场景。
1. cv2.TM_SQDIFF(平方差匹配法)
- 原理:计算模板与图像中每个可能位置的像素值平方差的总和。匹配结果值越小,表示匹配程度越高。
- 特点:对光照变化比较敏感,因为它直接比较像素值的差异。
- 公式: R ( x , y ) = ∑ x ′ , y ′ ( T ( x ′ , y ′ ) − I ( x + x ′ , y + y ′ ) ) 2 R(x,y)=\sum _{x',y'} (T(x',y') - I(x + x',y + y'))^2 R(x,y)=∑x′,y′(T(x′,y′)−I(x+x′,y+y′))2,其中 T T T 是模板图像, I I I 是输入图像, R R R 是匹配结果图像。
- 适用场景:适用于模板和目标图像的光照条件较为一致的情况。
2. cv2.TM_SQDIFF_NORMED(归一化平方差匹配法)
- 原理:是
cv2.TM_SQDIFF的归一化版本,将平方差结果归一化到 [0, 1] 范围内。匹配结果值越接近 0,表示匹配程度越高。 - 特点:对光照变化有一定的鲁棒性,因为归一化操作减少了不同图像之间像素值范围差异的影响。
- 适用场景:当模板和目标图像的光照有一定差异,但差异不是特别大时适用。
3. cv2.TM_CCORR(相关性匹配法)
- 原理:计算模板与图像中每个可能位置的像素值相关性。匹配结果值越大,表示匹配程度越高。
- 特点:对光照变化也比较敏感,因为它直接依赖于像素值的相关性。
- 公式: R ( x , y ) = ∑ x ′ , y ′ ( T ( x ′ , y ′ ) ⋅ I ( x + x ′ , y + y ′ ) ) R(x,y)=\sum _{x',y'} (T(x',y') \cdot I(x + x',y + y')) R(x,y)=∑x′,y′(T(x′,y′)⋅I(x+x′,y+y′))
- 适用场景:适用于模板和目标图像的光照条件较为一致,且模板和目标之间的亮度模式相似的情况。
4. cv2.TM_CCORR_NORMED(归一化相关性匹配法)
- 原理:是
cv2.TM_CCORR的归一化版本,将相关性结果归一化到 [0, 1] 范围内。匹配结果值越接近 1,表示匹配程度越高。 - 特点:对光照变化有较好的鲁棒性,因为归一化操作消除了不同图像之间像素值范围差异的影响。
- 适用场景:在光照条件不稳定的情况下,是一种比较常用的匹配方法。
5. cv2.TM_CCOEFF(相关系数匹配法)
- 原理:计算模板与图像中每个可能位置的像素值相关系数。匹配结果值越大,表示匹配程度越高。相关系数衡量的是两个信号之间的线性相关性。
- 特点:对光照变化有一定的鲁棒性,因为它考虑了模板和图像的均值。
- 适用场景:适用于模板和目标图像的光照有一定差异,但整体结构相似的情况。
6. cv2.TM_CCOEFF_NORMED(归一化相关系数匹配法)
- 原理:是
cv2.TM_CCOEFF的归一化版本,将相关系数结果归一化到 [-1, 1] 范围内。匹配结果值越接近 1,表示匹配程度越高。 - 特点:对光照变化具有较强的鲁棒性,是一种比较稳定的匹配方法。
- 适用场景:在各种光照条件下都能有较好的表现,是最常用的模板匹配方法之一。
代码示例
import cv2
import numpy as np# 读取图像和模板
img = cv2.imread('image.jpg', 0)
template = cv2.imread('template.jpg', 0)
h, w = template.shape[:2]# 定义匹配方法
methods = ['cv2.TM_SQDIFF', 'cv2.TM_SQDIFF_NORMED', 'cv2.TM_CCORR','cv2.TM_CCORR_NORMED', 'cv2.TM_CCOEFF', 'cv2.TM_CCOEFF_NORMED']for meth in methods:img2 = img.copy()method = eval(meth)# 执行模板匹配res = cv2.matchTemplate(img2, template, method)min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)# 根据不同的匹配方法确定最佳匹配位置if method in [cv2.TM_SQDIFF, cv2.TM_SQDIFF_NORMED]:top_left = min_locelse:top_left = max_locbottom_right = (top_left[0] + w, top_left[1] + h)# 在图像上绘制矩形框标记匹配位置cv2.rectangle(img2, top_left, bottom_right, 255, 2)# 显示结果cv2.imshow(meth, img2)cv2.waitKey(0)
cv2.destroyAllWindows()
这个示例代码展示了如何使用不同的模板匹配方法在图像中查找模板的位置,并在图像上绘制矩形框标记匹配结果。你可以根据实际需求选择合适的匹配方法。
#include <opencv2/opencv.hpp>
#include <iostream>using namespace cv;
using namespace std;// 定义模板匹配方法名称和对应的枚举值
const char* method_names[] = { "TM_SQDIFF", "TM_SQDIFF_NORMED", "TM_CCORR","TM_CCORR_NORMED", "TM_CCOEFF", "TM_CCOEFF_NORMED" };
const int methods[] = { TM_SQDIFF, TM_SQDIFF_NORMED, TM_CCORR,TM_CCORR_NORMED, TM_CCOEFF, TM_CCOEFF_NORMED };int main()
{// 读取图像和模板Mat img = imread("image.jpg", IMREAD_GRAYSCALE);Mat template_img = imread("template.jpg", IMREAD_GRAYSCALE);if (img.empty() || template_img.empty()){cout << "Could not open or find the image or template" << endl;return -1;}int h = template_img.rows;int w = template_img.cols;// 遍历不同的匹配方法for (int i = 0; i < 6; i++){Mat img2 = img.clone();Mat result;// 执行模板匹配matchTemplate(img2, template_img, result, methods[i]);double minVal, maxVal;Point minLoc, maxLoc;// 查找匹配结果中的最小值和最大值以及它们的位置minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc);Point topLeft;bool isMatch = false;// 根据不同的匹配方法确定最佳匹配位置,并判断是否匹配成功if (methods[i] == TM_SQDIFF || methods[i] == TM_SQDIFF_NORMED){topLeft = minLoc;if (methods[i] == TM_SQDIFF_NORMED && minVal < 0.1) // 可调整阈值{isMatch = true;}}else if (methods[i] == TM_CCORR_NORMED && maxVal > 0.8) // 可调整阈值{topLeft = maxLoc;isMatch = true;}else if (methods[i] == TM_CCOEFF_NORMED && maxVal > 0.8) // 可调整阈值{topLeft = maxLoc;isMatch = true;}if (isMatch){Point bottomRight(topLeft.x + w, topLeft.y + h);// 在图像上绘制矩形框标记匹配位置rectangle(img2, topLeft, bottomRight, Scalar(255), 2);}else{cout << "No match found using " << method_names[i] << endl;}// 显示结果imshow(method_names[i], img2);}waitKey(0);destroyAllWindows();return 0;
}
相关文章:

opencv 模板匹配方法汇总
在OpenCV中,模板匹配是一种在较大图像中查找特定模板图像位置的技术。OpenCV提供了多种模板匹配方法,通过cv2.matchTemplate函数实现,该函数支持的匹配方式主要有以下6种,下面详细介绍每种方法的原理、特点和适用场景。 1. cv2.T…...
Embedding技术:DeepWalkNode2vec
引言 在推荐系统中,Graph Embedding技术已经成为一种强大的工具,用于捕捉用户和物品之间的复杂关系。本文将介绍Graph Embedding的基本概念、原理及其在推荐系统中的应用。 什么是Graph Embedding? Graph Embedding是一种将图中的节点映射…...

微信小程序注册组件
在微信小程序中注册组件分为自定义组件的创建和全局/局部注册,下面为你详细介绍具体步骤和示例。 自定义组件的创建 自定义组件由四个文件组成,分别是 .js(脚本文件)、.json(配置文件)、.wxml(…...

【docker】安装mysql,修改端口号并重启,root改密
我的docker笔记 【centOS】安装docker环境,替换国内镜像 1. 配置镜像源 使用阿里云镜像加速器,编辑/etc/docker/daemon.json sudo mkdir -p /etc/docker sudo tee /etc/docker/daemon.json <<-EOF {"registry-mirrors": ["https:/…...

自定义wordpress三级导航菜单代码
首先,在你的主题functions.php文件中,添加以下代码以注册一个新的菜单位置: function mytheme_register_menus() {register_nav_menus(array(primary-menu > __(Primary Menu, mytheme))); } add_action(init, mytheme_register_menus); …...
洛谷 P1480 A/B Problem(高精度详解)c++
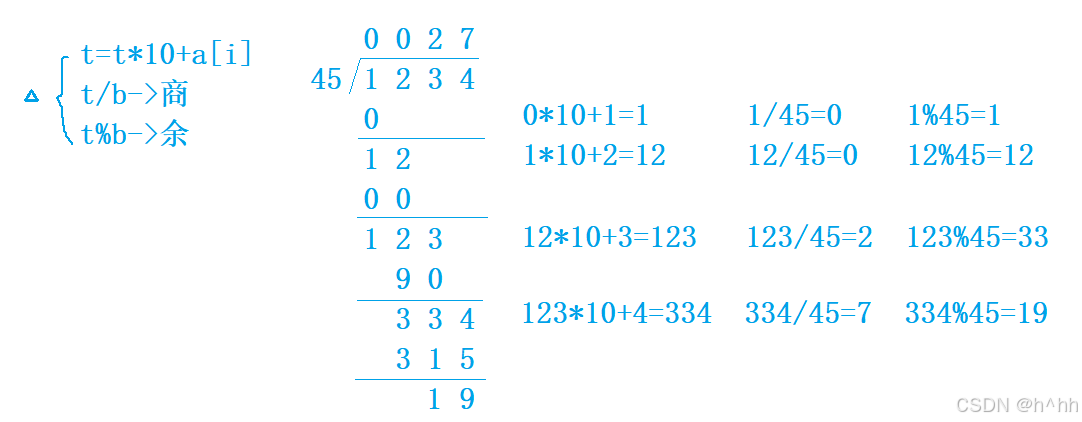
题目链接:P1480 A/B Problem - 洛谷 1.题目分析 1:说明这里是高精度除以低精度的形式,为什么不是高精度除以高精度的形式,是因为它很少见,它的模拟方式是用高精度减法来做的,并不能用小学列竖式的方法模拟…...

JAVA入门——网络编程简介
自己学习时的笔记,可能有点水( 以后可能还会补充(大概率不会) 一、基本概念 网络编程三要素: IP 设备在网络中的唯一标识 端口号 应用软件在设备中的唯一标识两个字节表示的整数,0~1023用于知名的网络…...

Ubuntu 合上屏幕 不待机 设置
有时候需要Ubuntu的机器合上屏幕的时候也能正常工作,而不是处于待机状态。 需要进行配置文件的设置,并重启即可。 1. 修改配置文件 /etc/systemd/logind.conf sudo vi /etc/systemd/logind.conf 然后输入i,进入插入状态,修改如…...

捣鼓180天,我写了一个相册小程序
🙋为什么要做土著相册这样一个产品? ➡️在高压工作之余,我喜欢浏览B站上的熊猫幼崽视频来放松心情。有天在家族群里看到了大嫂分享的侄女卖萌照片,同样感到非常解压。于是开始翻阅过去的聊天记录,却发现部分图片和视…...

短分享-Flink图构建
一、背景 通过简单的书写map、union、keyby等代码,Flink便能构建起一个庞大的分布式计算任务,Flink如何实现的这个酷炫功能呢?我们本次分享Flink做的第一步,将代码解析构建成图 源码基于Flink 2.10,书籍参考《Flink核…...

【监督学习】支持向量机步骤及matlab实现
支持向量机 (四)支持向量机1.算法步骤2. MATLAB 实现参考资料 (四)支持向量机 支持向量机(Support Vector Machine, SVM)是一种用于分类、回归分析以及异常检测的监督学习模型。SVM特别擅长处理高维空间的…...

机器学习-随机森林解析
目录 一、.随机森林的思想 二、随机森林构建步骤 1.自助采样 2.特征随机选择 3构建决策树 4.集成预测 三. 随机森林的关键优势 **(1) 减少过拟合** **(2) 高效并行化** **(3) 特征重要性评估** **(4) 耐抗噪声** 四. 随机森林的优缺点 优点 缺点 五.…...

Javaweb后端spring事务管理 事务四大特性ACID
2步操作,只能同时成功,同时失败,要放在一个事务中,最后提交事务或者回滚事务 事务控制 事务管理进阶 事务的注解 这是所有异常都会回滚 事务注解 事务的传播行为 四大特性...

在Spring Boot + MyBatis中优雅处理多表数据清洗:基于XML的配置化方案
问题背景 在实际业务中,我们常会遇到数据冗余问题。例如,一个公司表(sys_company)中存在多条相同公司名的记录,但只有一条有效(del_flag0),其余需要删除。删除前需将关联表…...

【无标题】四色拓扑模型与宇宙历史重构的猜想框架
### 四色拓扑模型与宇宙历史重构的猜想框架 --- #### **一、理论基础:四色拓扑与时空全息原理的融合** 1. **宇宙背景信息的拓扑编码** - **大尺度结构网络**:将星系团映射为四色顶点,纤维状暗物质结构作为边,构建宇宙尺度…...

[特殊字符] Django 常用命令
🚀 Django 常用命令大全:从开发到部署 Django 提供了许多实用的命令,可以用于 数据库管理、调试、测试、用户管理、运行服务器、部署 等。 本教程将详细介绍 Django 开发中最常用的命令,并提供 示例,帮助你更高…...

mysql中如何保证没有幻读发生
在 MySQL 中,幻读(Phantom Read)是指在一个事务中,两次相同的查询返回了不同的结果集,通常是由于其他事务插入或删除了符合查询条件的数据。为了保证没有幻读,MySQL 主要通过 事务隔离级别 和 锁机制 来实现…...

Golang实践录:go发布版本信息收集
go发布版本信息收集。 背景 本文从官方、网络资料收罗有关go的发布历史概况。主要目的是能快速了解golang不同版本的变更。鉴于官方资料为英文,为方便阅读,使用工具翻译成中文,重要特性参考其它资料补充/修改。由于发布版本内容较多…...

字节跳动AI原生编程工具Trae和百度“三大开发神器”AgentBuilder、AppBuilder、ModelBuilder的区别是?
字节跳动AI编程工具Trae与百度"三大开发神器"(AgentBuilder、AppBuilder、ModelBuilder)在定位、功能架构和技术路线上存在显著差异,具体区别如下: 一、核心定位差异 Trae:AI原生集成开发环境(AI…...

【UCB CS 61B SP24】Lecture 21: Data Structures 5: Priority Queues and Heaps 学习笔记
本文介绍了优先队列与堆,分析了最小堆的插入与删除过程,并用 Java 实现了一个通用类型的最小堆。 1. 优先队列 1.1 介绍 优先队列是一种抽象数据类型,其元素按照优先级顺序被处理。不同于普通队列的先进先出(FIFO)&…...

编程统计公司内部资料查阅使用数据,优化资料分类存储方式。提升职场员工工作查阅办事效率。
构建一个公司内部资料查阅使用统计与资料分类存储优化的商务智能示例项目,去营销化、中立化,仅用于学习与工程实践参考。一、实际应用场景描述在中大型企业中,内部资料(制度、流程文档、技术手册、项目档案)数量庞大&a…...

单元体幕墙计算方法研究
单元体幕墙计算方法研究 一、单元板块计算 选择隔离的单个单元进行计算,不需要考虑周边单元的影响。 单元之间的相互影响,来自于左右立柱的变形不一致,在截面选择上反应的就是左右立柱的截面参数的不同。 所以,单元间的相互影响,可以通过控制左右立柱截面参数的相近而进…...

终极指南:3步掌握yfinance金融数据获取与智能修复实战
终极指南:3步掌握yfinance金融数据获取与智能修复实战 【免费下载链接】yfinance Download market data from Yahoo! Finances API 项目地址: https://gitcode.com/GitHub_Trending/yf/yfinance yfinance是一个强大的Python库,能够从Yahoo! Finan…...

告别手动框选!用SUSTechPOINTS的V键批量标注,5分钟搞定一帧点云
解锁SUSTechPOINTS的V键批量标注:点云处理效率革命 在自动驾驶与机器人研发领域,点云标注是构建高精度感知模型的基础环节,但传统逐帧手动标注方式往往成为项目进度的瓶颈。我曾参与过一个城市级点云数据集标注项目,团队最初采用常…...

如何3步获取百度网盘真实下载地址实现满速下载
如何3步获取百度网盘真实下载地址实现满速下载 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 你是否曾被百度网盘的非会员下载速度困扰?当下载重要的工作文件、学…...

OpenAgentsControl:构建多智能体协同系统的开源框架解析
1. 项目概述:一个面向智能体控制的开放框架最近在折腾AI智能体(Agent)相关的项目,发现一个挺有意思的开源仓库:darrenhinde/OpenAgentsControl。这个项目名字直译过来就是“开放智能体控制”,听起来就很有搞…...

终极ThinkPad风扇控制指南:告别噪音,拥抱静音高效
终极ThinkPad风扇控制指南:告别噪音,拥抱静音高效 【免费下载链接】TPFanCtrl2 ThinkPad Fan Control 2 (Dual Fan) for Windows 10 and 11 项目地址: https://gitcode.com/gh_mirrors/tp/TPFanCtrl2 你是否曾经因为ThinkPad风扇的"直升机起…...
)
【限时解密】ElevenLabs未文档化的/v1/text-to-speech/{voice_id}/with-timing接口:获取逐词时间戳+音素级对齐数据(仅剩3个Beta白名单通道)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs英文语音生成的核心能力与技术定位 ElevenLabs 是当前业界领先的 AI 语音合成平台,其英文语音生成能力建立在自研的端到端神经声学模型(如 ElevenMultilingualV2&…...

开源可视化利器:用声明式数据驱动构建交互式技术解释图
1. 项目概述:一个将复杂概念可视化的开源利器最近在整理技术分享材料时,我一直在寻找一种能直观展示复杂系统架构或算法流程的工具。传统的流程图工具要么太笨重,要么定制化程度不够,直到我遇到了nicobailon/visual-explainer这个…...

DeepLake:AI原生数据湖统一管理多模态数据与向量嵌入
1. 项目概述:当数据湖遇上AI向量化如果你正在构建一个AI应用,无论是RAG检索增强生成系统、多模态模型训练,还是复杂的语义搜索,数据管理环节的复杂性往往会让你头疼不已。传统的文件系统、数据库,甚至是对象存储&#…...