【C++】:STL详解 —— 红黑树
目录
平衡二叉查找树
红黑树的概念
红黑树的五大性质
红黑树的效率
红黑树和AVL树的比较
插入与删除操作
内存与实现复杂度
经典性能数据对比
总结
对旋转的基本理解
旋转的作用
左旋(Left Rotation)
右旋(Right Rotation)
红黑树的插入操作
一、插入步骤概述
二、详细插入流程
三、插入后的修复(Fix-Up)
Case 1
Case 2
Case 3
代码实现
红黑树的删除操作
一、删除操作总体步骤
二、详细删除流程
代码实现
红黑树源代码
平衡二叉查找树
平衡二叉查找树(Balanced Binary Search Tree) 是一类通过特定规则维持树结构相对平衡的二叉查找树,旨在解决普通二叉查找树(BST)在动态操作(插入、删除)中可能退化成链表的极端情况,从而保证最坏情况下的时间复杂度为 O(log n)。
常见平衡二叉查找树类型
| 类型 | 核心规则 | 适用场景 |
|---|---|---|
| AVL树 | 严格平衡:任意节点的左右子树高度差≤1 | 读操作多,写操作少的场景 |
| 红黑树 | 宽松平衡:通过颜色和黑高约束路径长度,最长路径≤2倍最短路径 | 写操作频繁(如数据库、内存管理) |
| Splay树 | 局部性原理:最近访问的节点通过旋转移动到根,无需全局平衡 | 缓存、热点数据访问 |
| Treap | 结合BST和堆:节点同时有键值和随机优先级,通过优先级维护近似平衡 | 简单实现的概率平衡结构 |
| B树/B+树 | 多路平衡树:每个节点可包含多个键,减少磁盘I/O(常用于数据库和文件系统) | 大规模数据存储 |
平衡代价与性能权衡
| 类型 | 插入/删除代价 | 查找代价 | 平衡严格性 | 适用场景 |
|---|---|---|---|---|
| AVL树 | 高(频繁旋转) | 最优(O(log n)) | 严格 | 静态数据、频繁查询 |
| 红黑树 | 较低(颜色调整为主) | 接近AVL树 | 宽松 | 动态数据、频繁更新 |
| Splay树 | 均摊O(log n) | 均摊O(log n) | 无全局规则 | 局部性强的数据访问 |
| Treap | 概率平衡(O(log n)) | O(log n) | 概率性 | 简单实现、中等规模数据 |
为什么需要多种平衡树?
不同平衡树在平衡严格性、维护成本、适用场景上各有优劣:
-
AVL树:适合读多写少的场景(如字典、静态索引)。
-
红黑树:工程实践中广泛使用(如C++ STL的
std::map),平衡维护成本较低。 -
B树/B+树:专为磁盘或数据库设计,减少I/O次数。
-
Splay树:利用数据访问的局部性,无需显式平衡操作。
注意:红黑树和AVL树是理论结合实践的经典设计,而B树家族则在大规模数据存储中占据核心地位
红黑树的概念
红黑树(Red-Black Tree)的核心理念源于对平衡二叉查找树的探索,其历史可追溯至20世纪70年代计算机科学的快速发展期。以下是其关键发展节点:
-
1972年:德国计算机科学家鲁道夫·拜尔(Rudolf Bayer)提出对称二叉B树(Symmetric Binary B-Tree),这是红黑树的前身,旨在将B树的特性(多路平衡)引入二叉结构。
-
1978年:美国计算机科学家罗伯特·塞奇威克(Robert Sedgewick)和莱昂尼达斯·J·吉巴斯(Leonidas J. Guibas)在论文《A Dichromatic Framework for Balanced Trees》中首次明确使用红黑颜色标记来简化对称二叉B树的平衡规则,并将其命名为“红黑树”。
-
1980年代后:红黑树因其高效的动态操作性能,逐渐成为工程实践中的主流平衡树,被纳入多种编程语言标准库和操作系统核心模块。
-
红黑树虽然是复杂的,但它的最坏情况运行时间也是非常良好的,并且在实践中是高效的: 它可以在O(log n)时间内做查找,插入和删除,这里的n 是树中元素的数目
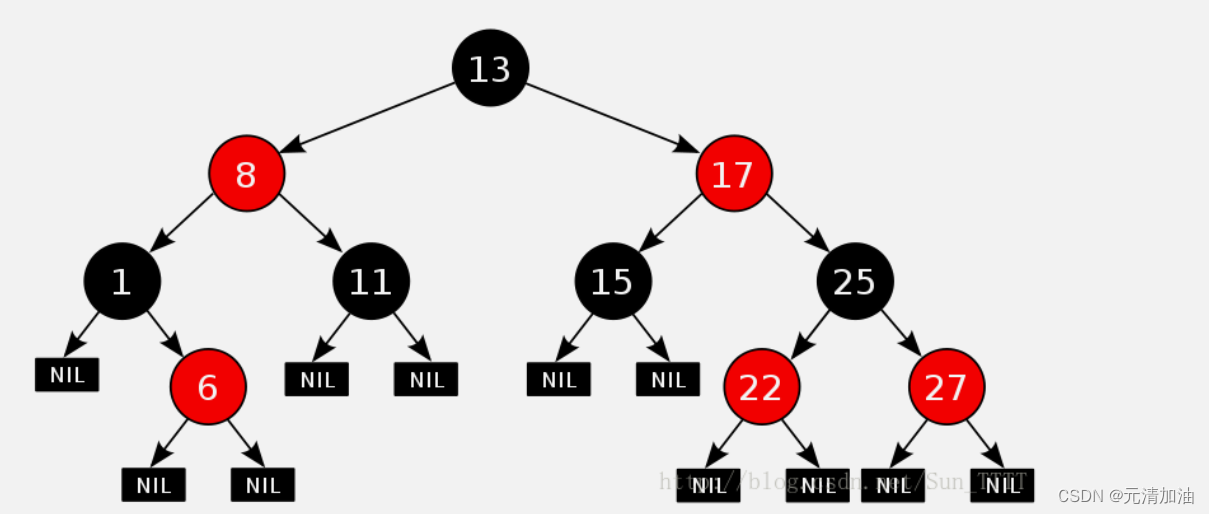
红黑树的五大性质
红黑树通过以下规则确保平衡性:
-
颜色属性:每个节点非红即黑。
-
根节点为黑:根节点必须为黑色。
-
叶子节点为黑:所有叶子节点(NIL节点,即空指针)视为黑色。
-
红色不相邻:红色节点的子节点必须为黑色(禁止连续红色节点)。
-
黑高一致:从任意节点到其所有叶子节点的路径中,黑色节点的数量相同(称为黑高)。
1、颜色属性
-
规则:每个节点必须是红色或黑色。
-
作用:颜色标记用于编码平衡规则,简化旋转和调整逻辑。
2、根节点为黑色
-
规则:树的根节点必须为黑色。
-
意义:避免根节点为红色时可能违反“红色不相邻”规则,确保树顶层的稳定性。
3、叶子节点为黑色
-
规则:所有叶子节点(即NIL节点,空指针或空节点)视为黑色。
-
注意:这里的“叶子节点”指实际数据节点的空子节点,而非存储数据的末端节点。
-
作用:统一路径终点的颜色,简化黑高计算。这样可以确保每个路径上的黑色节点数量相等,即使是经过了空节点的路径。
4、红色节点不相邻
-
规则:红色节点的父节点和子节点必须为黑色(即不能有连续的红色节点)。
-
意义:限制最长路径的长度,防止路径过长。
-
最长路径示例:红黑交替(如黑→红→黑→红→黑)。
-
最短路径:全黑节点。
-
5、黑高一致(Black Height Consistency)
-
规则:从任意节点到其所有叶子节点(NIL)的路径中,经过的黑色节点数量必须相同(称为黑高)。
-
黑节点A(黑高=2)/ \红B 黑C(黑高=1)/ \ / \ NIL NIL NIL NIL(黑高=1)从A到叶子:路径A→B→NIL的黑色节点数为2(A和NIL);路径A→C→NIL的黑色节点数也为2(A、C、NIL中的C和NIL算作黑色)。
-
关键作用:黑高一致性确保树的高度最多为最短路径的2倍,维持平衡。
我们需要注意的是空节点(NIL节点)被认为是黑色的,从任意节点出发,到达其每个叶子节点的路径上的黑色节点数量必须相同
红黑树的效率
红黑树通过自平衡机制确保插入、删除、查找等操作的时间复杂度稳定在 O(log n),其效率优势体现在以下方面:
时间复杂度保障
| 操作 | 时间复杂度 | 原因 |
|---|---|---|
| 插入 | O(log n) | 通过颜色调整和至多2次旋转修复平衡,树高度被限制为O(log n)。 |
| 删除 | O(log n) | 删除后可能需3次旋转和颜色调整,但整体路径长度仍为对数级。 |
| 查找 | O(log n) | 树高度近似平衡,避免退化为链表。 |
| 遍历/范围查询 | O(n) | 中序遍历有序数据,与普通二叉搜索树一致。 |
红黑树的查找,插入和删除操作,时间复杂度都是O(logN)
红黑树和AVL树的比较
插入与删除操作
| 操作 | 红黑树 | AVL 树 |
|---|---|---|
| 插入 | 最多需要 2 次旋转 + 颜色调整 | 可能触发多次旋转(单旋或双旋),最多 O(1) 次旋转 |
| 删除 | 最多需要 3 次旋转 + 颜色调整 | 可能从删除点回溯到根节点调整,最多 O(log n) 次旋转 |
| 维护成本 | 调整以颜色标记为主,旋转次数少 | 严格维护平衡因子,旋转频率高 |
| 动态性能 | 更适合频繁插入/删除的场景(如数据库事务日志) | 频繁更新时性能下降明显 |
内存与实现复杂度
| 维度 | 红黑树 | AVL 树 |
|---|---|---|
| 额外存储 | 每个节点仅需 1 bit 存储颜色(红/黑) | 每个节点需存储 平衡因子(2~3 bit) 或 子树高度(4~8 bit) |
| 实现复杂度 | 中等(需处理颜色调整和多种修复情况) | 较高(需处理更多旋转类型和高度更新) |
| 代码维护 | 规则明确,修复逻辑模块化(如插入分 3 种 Case) | 需要处理复杂的平衡因子更新和旋转组合 |
经典性能数据对比
-
插入 100 万随机数据:
-
红黑树:耗时 ≈ 120 ms(旋转约 50 万次)
-
AVL 树:耗时 ≈ 180 ms(旋转约 80 万次)
-
-
插入 100 万有序数据:
-
红黑树:耗时 ≈ 150 ms(旋转次数稳定)
-
AVL 树:耗时 ≈ 220 ms(频繁触发双旋)
-
-
查找 100 万次随机键:
-
红黑树:耗时 ≈ 90 ms
-
AVL 树:耗时 ≈ 70 ms
-
总结
| 维度 | 红黑树 | AVL 树 | 胜出场景 |
|---|---|---|---|
| 动态操作 | ✅ 更高效 | ❌ 高维护成本 | 高频插入/删除 |
| 查询速度 | ❌ 稍慢 | ✅ 更快 | 静态数据/低频更新 |
| 内存占用 | ✅ 更低 | ❌ 更高 | 内存敏感型系统 |
| 实现复杂度 | ✅ 更简单 | ❌ 复杂 | 快速开发/维护 |
最终建议:
-
选择 红黑树:若需在动态数据操作中平衡效率与成本(90% 的工程场景)。
-
选择 AVL 树:若数据稳定且追求极致查找性能(如科学计算、静态索引)。
对旋转的基本理解
旋转(Rotation)是平衡二叉查找树(如红黑树、AVL树)中用于调整树结构的核心操作,目的是在不破坏二叉查找树性质的前提下,通过局部子树的重构来恢复平衡。以下是旋转的核心要点:
旋转的作用
-
降低树高:通过改变节点父子关系,减少树的高度差。
-
恢复平衡:解决因插入或删除导致的树结构失衡问题。
-
保持有序性:旋转后,二叉查找树的键值顺序(左小右大)依然成立。
左旋(Left Rotation)
当某个节点的右子树高度较高时,通过左旋提升右子节点为父节点。
关键注释说明:
-
节点角色定义
-
subR:原父节点的右子节点,旋转后将成为新父节点 -
subRL:subR的左子节点,需要重新挂接到原父节点右侧 -
parentParent:原父节点的父节点,用于将subR接入原树结构 -
parent:原父节点,旋转后subR的左子节点
-
-
连接关系调整
-
将
subRL从subR剥离并挂接到parent右侧 -
将parent降级为subR的左子节点
-
更新所有涉及的父指针(核心难点)
-
-
根节点特殊处理
-
当旋转节点是根节点时,需要更新整棵树的根指针
-
非根节点时,通过
parentParent将subR接入原树
-
// 左旋前结构:
// parent
// / \
// A subR
// / \
// subRL C// 左旋后结构:
// subR
// / \
// parent C
// / \
// A subRL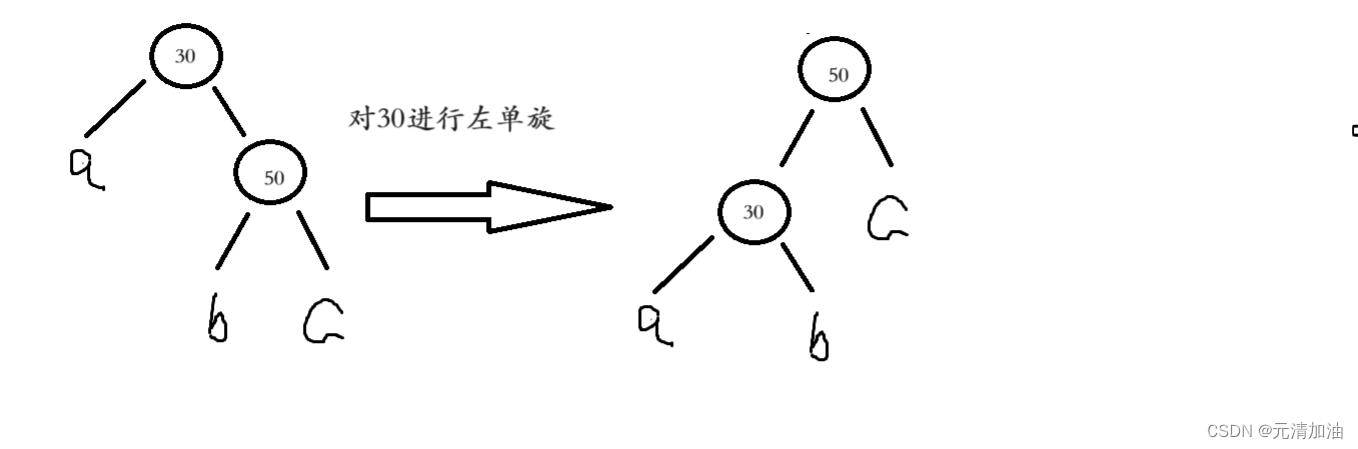
代码示例:
template<class K, class V>
void AVLTree<K, V>::RotateL(Node* parent) // 左旋操作(以parent为旋转中心)
{// 步骤1:获取相关节点指针Node* subR = parent->_right; // subR是parent的右子节点(将上升为新父节点)Node* subRL = subR->_left; // subRL是subR的左子节点(可能为空)Node* parentParent = parent->_parent; // 保存原父节点的父节点(即subR的新父节点)// 步骤2:重构子树连接关系// --------------------------------------------------------------parent->_right = subRL; // 将subRL挂接到parent的右侧if (subRL) // 如果subRL存在,更新其父指针指向parent{subRL->_parent = parent;}subR->_left = parent; // 将parent挂接为subR的左子节点parent->_parent = subR; // 更新parent的父指针指向subR// 步骤3:将subR连接到原树结构中// --------------------------------------------------------------if (_root == parent) // 如果parent是根节点{ _root = subR; // 更新根节点为subRsubR->_parent = nullptr; // 新根节点的父指针置空} else // 如果parent不是根节点{ // 判断原父节点是左子还是右子,并将subR挂接到正确位置if (parentParent->_left == parent) {parentParent->_left = subR;} else {parentParent->_right = subR;}subR->_parent = parentParent; // 更新subR的父指针}
}右旋(Right Rotation)
当某个节点的左子树高度较高时,通过右旋提升左子节点为父节点。
关键注释说明
-
节点角色定义
-
subL:parent的左子节点,旋转后成为新父节点 -
subLR:subL的右子节点,需要挂接到parent左侧 -
parentParent:原父节点的父节点,用于将subL接入原树 -
parent:原父节点,旋转后成为subL的右子节点
-
- 连接关系调整
- 剥离subLR:将subL的右子树挂接到parent左侧
- 降级parent:将parent变为subL的右子节点
- 父指针更新:确保所有涉及节点正确关联
- 根节点特殊处理
- 若parent是根节点,需更新
_root指针 - 非根节点时通过
parentParent将subL接入原树
- 若parent是根节点,需更新
// 右旋前结构:
// parent
// / \
// subL C
// / \
// A subLR// 右旋后结构:
// subL
// / \
// A parent
// / \
// subLR C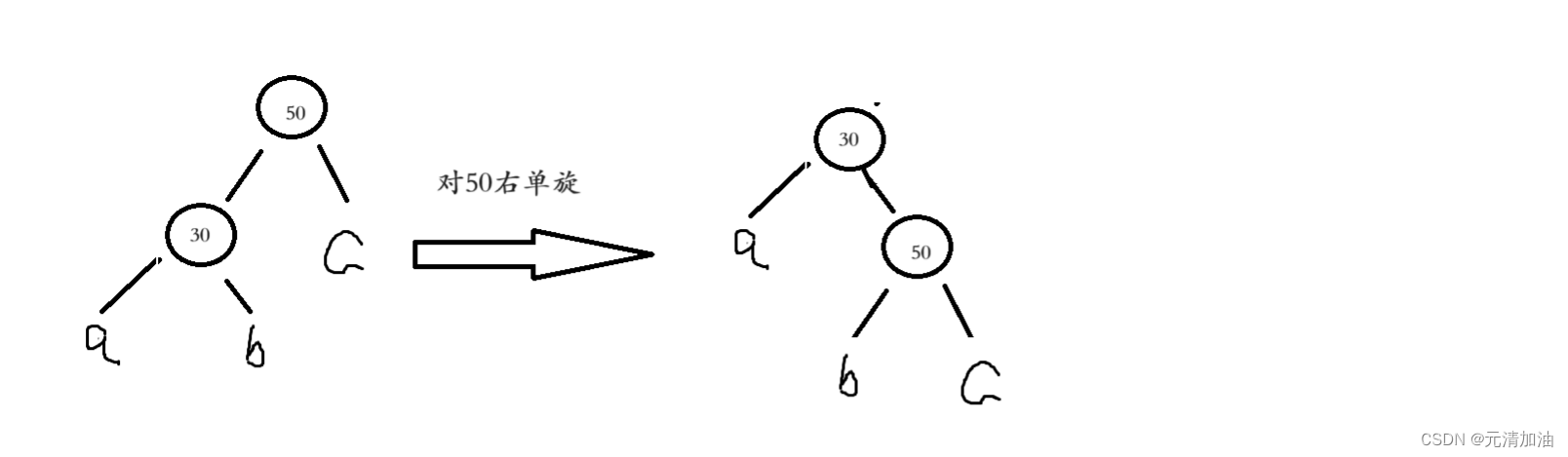
代码示例:
template<class K, class V>
void AVLTree<K, V>::RotateR(Node* parent) // 右旋操作(以parent节点为旋转中心)
{// 步骤1:获取相关节点指针// ----------------------------------------------------------Node* subL = parent->_left; // subL是parent的左子节点(将上升为新父节点)Node* subLR = subL->_right; // subLR是subL的右子节点(可能为空)// 步骤2:重构子树连接关系// ----------------------------------------------------------// 将subLR从subL剥离,挂接到parent左侧parent->_left = subLR; // parent的左子树指向subLRif (subLR) // 若subLR存在,更新其父指针指向parent{subLR->_parent = parent;}// 将parent降级为subL的右子节点subL->_right = parent; // subL的右子树接管parentparent->_parent = subL; // 更新parent的父指针指向subL// 步骤3:将subL连接到原树结构中// ----------------------------------------------------------Node* parentParent = parent->_parent; // 保存原父节点的父节点if (_root == parent) // Case1:parent是根节点{_root = subL; // 更新根节点为subLsubL->_parent = nullptr; // 新根节点的父指针置空} else // Case2:parent非根节点{// 判断原父节点是左子还是右子,将subL挂接到正确位置if (parentParent->_left == parent) {parentParent->_left = subL;} else {parentParent->_right = subL;}subL->_parent = parentParent; // 更新subL的父指针}
}红黑树的插入操作
红黑树的插入操作分为两个阶段:二叉查找树插入 和 颜色调整与旋转修复。
一、插入步骤概述
- 按照二叉搜索的树规则插入新节点
- 检测新节点插入后,红黑树的性质是否造到破坏
二、详细插入流程
1. 按BST规则插入
-
从根节点开始,递归比较键值大小,找到插入位置。
-
创建新节点,颜色设为 红色(保证不破坏黑高,但可能引发双红冲突)。
-
将新节点挂载到父节点的左/右子节点。
三、插入后的修复(Fix-Up)
修复操作的目标是消除双红冲突(父子节点均为红色),确保满足红黑树的五大性质。修复逻辑分为 3种情况:
约定:cur为当前节点,p为父节点,g为祖父节点,u为叔叔节点
- Case 1: 叔叔节点为红色
- Case 2: 叔叔节点为黑,且新节点与父节点方向一致
- Case 3: 叔叔节点为黑,且新节点与父节点方向不一致
Case 1
叔叔节点为红色
-
条件:父节点和叔叔节点均为红色。
-
操作:
-
将父节点和叔叔节点变黑。
-
祖父节点变红。
-
递归检查祖父节点(可能引发新的双红冲突)。
-
注意:
- 如果g是根节点,调整完后要将g变为黑色
- 如果g不是根节点,继续向上调整
原结构: 黑祖父 修复后: 红祖父/ \ / \红父 红叔 黑父 黑叔/ /红新节点 红新节点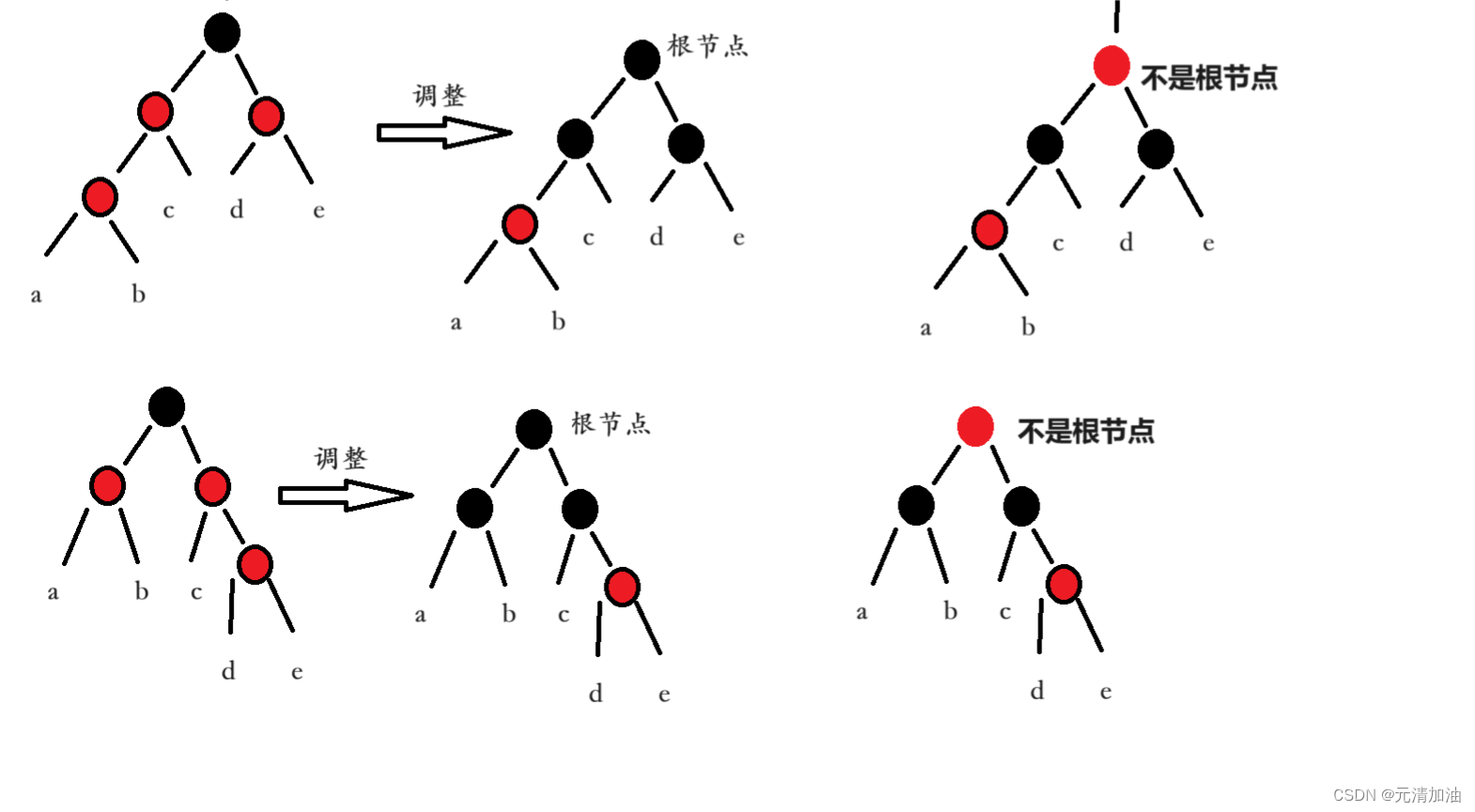
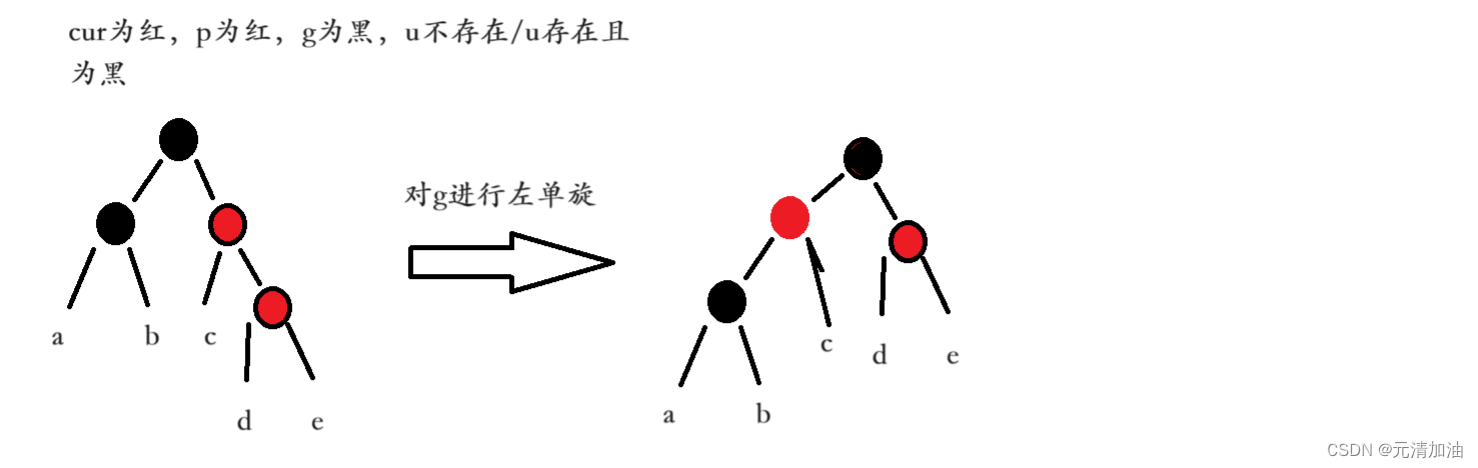
Case 2
叔叔节点为黑,且新节点与父节点方向一致
-
条件:
-
父节点是祖父节点的左子,新节点是父节点的左子(LL型)。
或 -
父节点是祖父节点的右子,新节点是父节点的右子(RR型)。
-
-
操作:
-
将父节点变黑,祖父节点变红。
-
对祖父节点进行 右旋(LL型)或 左旋(RR型)。
-
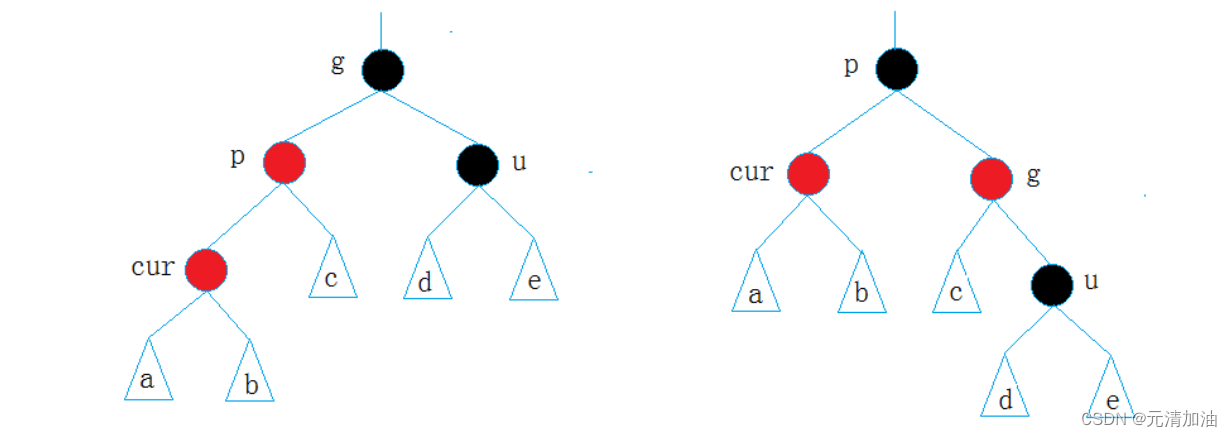
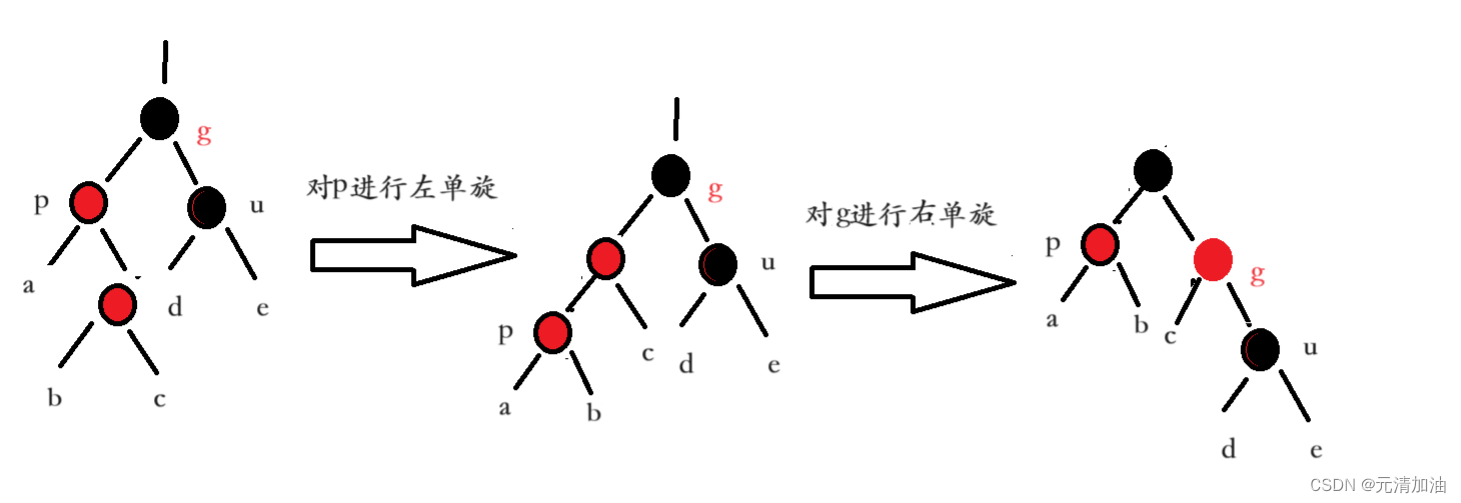
Case 3
叔叔节点为黑,且新节点与父节点方向不一致
-
条件:
-
父节点是祖父节点的左子,新节点是父节点的右子(LR型)。
或 -
父节点是祖父节点的右子,新节点是父节点的左子(RL型)。
-
-
操作:
-
对父节点进行 左旋(LR型)或 右旋(RL型),转化为Case 3。
-
继续按Case 3处理。
-
将父节点变黑,祖父节点变红。
-
对祖父节点进行 右旋(LL型)或 左旋(RR型)。
-
-
代码实现
// 红黑树插入函数,返回插入节点指针和是否插入成功的布尔值
pair<Node*, bool> Insert(const pair<K, V>& kv)
{// ---------------------- 空树情况处理 ----------------------if (_root == nullptr) {_root = new Node(kv);_root->_col = BLACK; // 根节点必须为黑色return make_pair(_root, true); // 返回新根节点和成功状态}// ---------------------- BST标准插入流程 ----------------------Node* cur = _root;Node* parent = nullptr;// 查找插入位置while (cur) {if (kv.first < cur->_kv.first) // 向左子树查找{parent = cur;cur = cur->_left;} else if (kv.first > cur->_kv.first) // 向右子树查找{parent = cur;cur = cur->_right;} else // 键值已存在{return make_pair(cur, false); // 返回已存在节点和失败状态}}// 创建新节点(默认红色)cur = new Node(kv);Node* newnode = cur; // 记录新节点用于返回// 挂载到父节点下if (kv.first < parent->_kv.first) {parent->_left = cur;} else {parent->_right = cur;}cur->_parent = parent; // 维护父指针// ---------------------- 红黑树平衡调整 ----------------------while (parent && parent->_col == RED) // 仅处理双红冲突{Node* grandfather = parent->_parent; // 祖父节点必存在if (parent == grandfather->_left) // 父节点是左子树情况{// Case 1:叔叔存在且为红(颜色扩散)// g(B) --> g(R)// / \ / \// p(R) u(R) ==> p(B) u(B)// /// c(R) Node* uncle = grandfather->_right;if (uncle && uncle->_col == RED) {parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 向上递归处理cur = grandfather;parent = cur->_parent;} // Case 2/3:叔叔为黑或不存在(需要旋转)else {if (cur == parent->_left) // LL型{// 右旋祖父节点// g(B) p(B)// / / \// p(R) ==> c(R) g(R)// /// c(R)RotateR(grandfather);grandfather->_col = RED;parent->_col = BLACK;} else // LR型(先左旋父节点转为LL型){// g(B) g(B) c(B)// / / / \// p(R) ==> c(R) ==> p(R) g(R)// \ /// c(R) p(R)RotateLR(grandfather); // 组合旋转:先左旋parent,再右旋grandfathergrandfather->_col = RED;cur->_col = BLACK; // cur成为局部根}break; // 旋转后子树平衡,无需继续处理}} // 对称处理父节点是右子树的情况else { Node* uncle = grandfather->_left;if (uncle && uncle->_col == RED) // Case 1{uncle->_col = parent->_col = BLACK;grandfather->_col = RED;cur = grandfather;parent = cur->_parent;} else {if (cur == parent->_left) // RL型{// g(B) g(B) c(B)// \ \ / \// p(R) ==> c(R) ==> g(R) p(R)// / \// c(R) p(R)RotateRL(grandfather); // 组合旋转:先右旋parent,再左旋grandfathergrandfather->_col = RED;cur->_col = BLACK;} else // RR型{RotateL(grandfather); // 左单旋grandfather->_col = RED;parent->_col = BLACK;}break;}}}// ---------------------- 强制根节点为黑 ----------------------_root->_col = BLACK; // 防止case1向上传播导致根变红return make_pair(newnode, true); // 返回新节点和成功状态
}红黑树的删除操作
红黑树的删除操作比插入更复杂,因为它可能破坏红黑树的平衡性质(尤其是黑高)。删除的核心步骤包括 二叉查找树删除 和 颜色/结构调整。
一、删除操作总体步骤
-
标准BST删除:找到待删除节点,按BST规则删除。
-
记录关键信息:
-
被删除节点颜色(黑色需修复,红色无需处理)。
-
确定替代节点(实际被移除的节点或其后继)。
-
-
修复红黑树性质:若删除的是黑色节点,需调整颜色和旋转。
二、详细删除流程
步骤1:执行BST删除
根据被删除节点的子节点数量,分为三种情况:
-
无子节点:直接删除,用NIL节点替代。
-
一个子节点:用子节点替代被删除节点。
-
两个子节点:找到后继节点,复制键值后删除后继节点。
步骤2:确定替代节点
-
被删除节点为叶子节点:替代节点为NIL。
-
被删除节点有一个子节点:替代节点为子节点。
-
被删除节点有两个子节点:替代节点为后继节点。
步骤3:修复双黑问题
若被删除节点是黑色,替代节点(或NIL)视为“双黑”,需根据兄弟节点颜色和子节点情况修复。修复分为 4种情况:
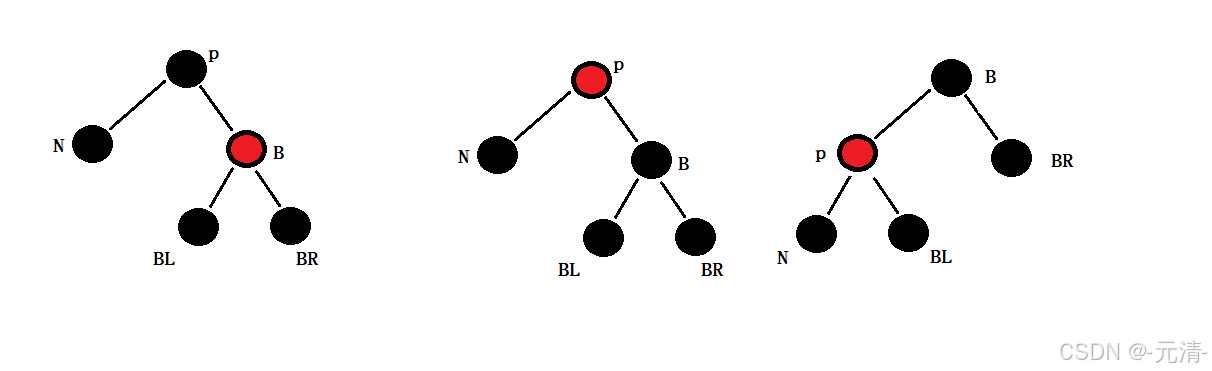
情况1:兄弟节点为红色
-
操作:
-
将兄弟节点 B 变黑,父节点
P变红。 -
对
P进行左旋(若替代节点N是左子)或右旋(若N是右子)。 -
更新兄弟节点 B 为旋转后的新兄弟(此时必为黑色),进入情况2、3或4。
-
情况2:兄弟节点为黑,且兄弟的两个子节点均为黑
-
操作:
-
将兄弟节点 B 变红。
-
将双黑问题上移至父节点
P。 -
若
P原为红色,则将其变黑,修复完成;否则,以P为新的双黑节点继续处理。
-
原结构: P(B) → 修复后: P(B)/ \ / \N(DB) S(B) N(B) S(R)/ \ / \SL(B) SR(B) SL(B) SR(B)情况3:兄弟节点为黑,兄弟的近侄子为红,远侄子为黑
-
操作:
-
将兄弟的近侄子变黑,兄弟变红。
-
对兄弟节点
S进行右旋(若N是左子)或左旋(若N是右子)。 -
更新兄弟节点为原近侄子,进入情况4。
-
原结构: P(B) → 旋转后: P(B)/ \ / \N(DB) S(B) N(DB) SL(B)/ \ \SL(R) SR(B) S(R)\SR(B)情况4:兄弟节点为黑,兄弟的远侄子为红
-
操作:
-
将兄弟节点
S的颜色设为父节点P的颜色。 -
将父节点
P和兄弟的远侄子变黑。 -
对父节点
P进行左旋(若N是左子)或右旋(若N是右子)。 -
双黑问题消除,修复完成。
-
原结构: P(?) → 旋转后: S(?)/ \ / \N(DB) S(B) P(B) SR(B)/ \ / \SL(?) SR(R) N(B) SL(?)代码实现
// 红黑树删除函数,返回删除是否成功
bool Erase(const K& key)
{// ---------------------- 查找待删除节点 ----------------------Node* parent = nullptr;Node* cur = _root;Node* delParentPos = nullptr; // 实际删除节点的父节点Node* delPos = nullptr; // 实际删除的节点while (cur) {if (key < cur->_kv.first) // 向左子树查找{ parent = cur;cur = cur->_left;} else if (key > cur->_kv.first) // 向右子树查找{parent = cur;cur = cur->_right;} else // 找到目标节点,根据子节点情况处理{if (cur->_left == nullptr) // 左子树为空{if (cur == _root) // 删除的是根节点{_root = _root->_right; // 右子树成为新根if (_root) {_root->_parent = nullptr;_root->_col = BLACK; // 根必须为黑}delete cur;return true;} else {delParentPos = parent; // 记录实际删除节点及其父节点delPos = cur;}break; // 进入红黑树调整阶段} else if (cur->_right == nullptr) // 右子树为空{if (cur == _root) // 处理根节点{_root = _root->_left;if (_root) {_root->_parent = nullptr;_root->_col = BLACK;}delete cur;return true;} else {delParentPos = parent;delPos = cur;}break;} else // 左右子树均不为空(替换法删除){// 找到右子树最小节点作为替代节点Node* minParent = cur;Node* minRight = cur->_right;while (minRight->_left) {minParent = minRight;minRight = minRight->_left;}// 将替代节点的值复制到当前节点cur->_kv = minRight->_kv; delParentPos = minParent; // 实际删除节点变为minRightdelPos = minRight;break; // 进入调整阶段}}}if (!delPos) return false; // 未找到待删除节点// ---------------------- 红黑树平衡调整 ----------------------Node* del = delPos; // 记录实际删除节点Node* delP = delParentPos;if (del->_col == BLACK) // 只有删除黑色节点需要调整{if (del->_left) // Case 0:存在红色左子节点{del->_left->_col = BLACK; // 直接变黑补偿黑高} else if (del->_right) // Case 0:存在红色右子节点{del->_right->_col = BLACK;} else // 双黑情况,需要复杂调整{while (del != _root) // 可能调整到根节点{// 分为左右子树两种情况处理(镜像对称)if (del == delP->_left) // 删除的是左子节点{Node* brother = delP->_right; // 兄弟节点// 情况1:兄弟为红色 --> 转为兄弟为黑的情况if (brother->_col == RED) {delP->_col = RED;brother->_col = BLACK;RotateL(delP); // 左旋父节点brother = delP->_right; // 更新兄弟节点}// 情况2:兄弟为黑且子节点全黑if ((!brother->_left || brother->_left->_col == BLACK) &&(!brother->_right || brother->_right->_col == BLACK)) {brother->_col = RED; // 兄弟变红if (delP->_col == RED) // 父节点红变黑终止{delP->_col = BLACK;break;}// 向上递归处理del = delP; delP = del->_parent;} else {// 情况3:兄弟左子红,右子黑 --> 转为情况4if (!brother->_right || brother->_right->_col == BLACK) {brother->_left->_col = BLACK;brother->_col = RED;RotateR(brother); // 右旋兄弟节点brother = delP->_right; // 更新兄弟}// 情况4:兄弟右子红(最终调整)brother->_col = delP->_col;delP->_col = BLACK;brother->_right->_col = BLACK;RotateL(delP); // 左旋父节点break; // 调整完成}} }}}// ---------------------- 实际节点删除操作 ----------------------if (del->_left == nullptr) { // 实际删除节点的左子树为空if (del == delP->_left) {delP->_left = del->_right; // 用右子树替代if (del->_right)del->_right->_parent = delP;} else {delP->_right = del->_right;if (del->_right)del->_right->_parent = delP;}} delete del; // 释放节点内存return true;
}红黑树源代码
//枚举定义结点的颜色
enum Colour
{RED,BLACK
};//红黑树结点的定义
template<class K, class V>
struct RBTreeNode
{//三叉链RBTreeNode<K, V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* _parent;//存储的键值对pair<K, V> _kv;//结点的颜色int _col; //红/黑//构造函数RBTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _col(RED){}
};//红黑树的实现
template<class K, class V>
class RBTree
{typedef RBTreeNode<K, V> Node;
public://构造函数RBTree():_root(nullptr){}//拷贝构造RBTree(const RBTree<K, V>& t){_root = _Copy(t._root, nullptr);}//赋值运算符重载(现代写法)RBTree<K, V>& operator=(RBTree<K, V> t){swap(_root, t._root);return *this;}//析构函数~RBTree(){_Destroy(_root);_root = nullptr;}//查找函数Node* Find(const K& key){Node* cur = _root;while (cur){if (key < cur->_kv.first) //key值小于该结点的值{cur = cur->_left; //在该结点的左子树当中查找}else if (key > cur->_kv.first) //key值大于该结点的值{cur = cur->_right; //在该结点的右子树当中查找}else //找到了目标结点{return cur; //返回该结点}}return nullptr; //查找失败}//插入函数pair<Node*, bool> Insert(const pair<K, V>& kv){if (_root == nullptr) //若红黑树为空树,则插入结点直接作为根结点{_root = new Node(kv);_root->_col = BLACK; //根结点必须是黑色return make_pair(_root, true); //插入成功}//1、按二叉搜索树的插入方法,找到待插入位置Node* cur = _root;Node* parent = nullptr;while (cur){if (kv.first < cur->_kv.first) //待插入结点的key值小于当前结点的key值{//往该结点的左子树走parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first) //待插入结点的key值大于当前结点的key值{//往该结点的右子树走parent = cur;cur = cur->_right;}else //待插入结点的key值等于当前结点的key值{return make_pair(cur, false); //插入失败}}//2、将待插入结点插入到树中cur = new Node(kv); //根据所给值构造一个结点Node* newnode = cur; //记录新插入的结点(便于后序返回)if (kv.first < parent->_kv.first) //新结点的key值小于parent的key值{//插入到parent的左边parent->_left = cur;cur->_parent = parent;}else //新结点的key值大于parent的key值{//插入到parent的右边parent->_right = cur;cur->_parent = parent;}//3、若插入结点的父结点是红色的,则需要对红黑树进行调整while (parent&&parent->_col == RED){Node* grandfather = parent->_parent; //parent是红色,则其父结点一定存在if (parent == grandfather->_left) //parent是grandfather的左孩子{Node* uncle = grandfather->_right; //uncle是grandfather的右孩子if (uncle&&uncle->_col == RED) //情况1:uncle存在且为红{//颜色调整parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续往上处理cur = grandfather;parent = cur->_parent;}else //情况2+情况3:uncle不存在 + uncle存在且为黑{if (cur == parent->_left){RotateR(grandfather); //右单旋//颜色调整grandfather->_col = RED;parent->_col = BLACK;}else //cur == parent->_right{RotateLR(grandfather); //左右双旋//颜色调整grandfather->_col = RED;cur->_col = BLACK;}break; //子树旋转后,该子树的根变成了黑色,无需继续往上进行处理}}else //parent是grandfather的右孩子{Node* uncle = grandfather->_left; //uncle是grandfather的左孩子if (uncle&&uncle->_col == RED) //情况1:uncle存在且为红{//颜色调整uncle->_col = parent->_col = BLACK;grandfather->_col = RED;//继续往上处理cur = grandfather;parent = cur->_parent;}else //情况2+情况3:uncle不存在 + uncle存在且为黑{if (cur == parent->_left){RotateRL(grandfather); //右左双旋//颜色调整cur->_col = BLACK;grandfather->_col = RED;}else //cur == parent->_right{RotateL(grandfather); //左单旋//颜色调整grandfather->_col = RED;parent->_col = BLACK;}break; //子树旋转后,该子树的根变成了黑色,无需继续往上进行处理}}}_root->_col = BLACK; //根结点的颜色为黑色(可能被情况一变成了红色,需要变回黑色)return make_pair(newnode, true); //插入成功}//删除函数bool Erase(const K& key){//用于遍历二叉树Node* parent = nullptr;Node* cur = _root;//用于标记实际的待删除结点及其父结点Node* delParentPos = nullptr;Node* delPos = nullptr;while (cur){if (key < cur->_kv.first) //所给key值小于当前结点的key值{//往该结点的左子树走parent = cur;cur = cur->_left;}else if (key > cur->_kv.first) //所给key值大于当前结点的key值{//往该结点的右子树走parent = cur;cur = cur->_right;}else //找到了待删除结点{if (cur->_left == nullptr) //待删除结点的左子树为空{if (cur == _root) //待删除结点是根结点{_root = _root->_right; //让根结点的右子树作为新的根结点if (_root){_root->_parent = nullptr;_root->_col = BLACK; //根结点为黑色}delete cur; //删除原根结点return true;}else{delParentPos = parent; //标记实际删除结点的父结点delPos = cur; //标记实际删除的结点}break; //进行红黑树的调整以及结点的实际删除}else if (cur->_right == nullptr) //待删除结点的右子树为空{if (cur == _root) //待删除结点是根结点{_root = _root->_left; //让根结点的左子树作为新的根结点if (_root){_root->_parent = nullptr;_root->_col = BLACK; //根结点为黑色}delete cur; //删除原根结点return true;}else{delParentPos = parent; //标记实际删除结点的父结点delPos = cur; //标记实际删除的结点}break; //进行红黑树的调整以及结点的实际删除}else //待删除结点的左右子树均不为空{//替换法删除//寻找待删除结点右子树当中key值最小的结点作为实际删除结点Node* minParent = cur;Node* minRight = cur->_right;while (minRight->_left){minParent = minRight;minRight = minRight->_left;}cur->_kv.first = minRight->_kv.first; //将待删除结点的key改为minRight的keycur->_kv.second = minRight->_kv.second; //将待删除结点的value改为minRight的valuedelParentPos = minParent; //标记实际删除结点的父结点delPos = minRight; //标记实际删除的结点break; //进行红黑树的调整以及结点的实际删除}}}if (delPos == nullptr) //delPos没有被修改过,说明没有找到待删除结点{return false;}//记录待删除结点及其父结点(用于后续实际删除)Node* del = delPos;Node* delP = delParentPos;//调整红黑树if (delPos->_col == BLACK) //删除的是黑色结点{if (delPos->_left) //待删除结点有一个红色的左孩子(不可能是黑色){delPos->_left->_col = BLACK; //将这个红色的左孩子变黑即可}else if (delPos->_right) //待删除结点有一个红色的右孩子(不可能是黑色){delPos->_right->_col = BLACK; //将这个红色的右孩子变黑即可}else //待删除结点的左右均为空{while (delPos != _root) //可能一直调整到根结点{if (delPos == delParentPos->_left) //待删除结点是其父结点的左孩子{Node* brother = delParentPos->_right; //兄弟结点是其父结点的右孩子//情况一:brother为红色if (brother->_col == RED){delParentPos->_col = RED;brother->_col = BLACK;RotateL(delParentPos);//需要继续处理brother = delParentPos->_right; //更新brother(否则在本循环中执行其他情况的代码会出错)}//情况二:brother为黑色,且其左右孩子都是黑色结点或为空if (((brother->_left == nullptr) || (brother->_left->_col == BLACK))&& ((brother->_right == nullptr) || (brother->_right->_col == BLACK))){brother->_col = RED;if (delParentPos->_col == RED){delParentPos->_col = BLACK;break;}//需要继续处理delPos = delParentPos;delParentPos = delPos->_parent;}else{//情况三:brother为黑色,且其左孩子是红色结点,右孩子是黑色结点或为空if ((brother->_right == nullptr) || (brother->_right->_col == BLACK)){brother->_left->_col = BLACK;brother->_col = RED;RotateR(brother);//需要继续处理brother = delParentPos->_right; //更新brother(否则执行下面情况四的代码会出错)}//情况四:brother为黑色,且其右孩子是红色结点brother->_col = delParentPos->_col;delParentPos->_col = BLACK;brother->_right->_col = BLACK;RotateL(delParentPos);break; //情况四执行完毕后调整一定结束}}else //delPos == delParentPos->_right //待删除结点是其父结点的左孩子{Node* brother = delParentPos->_left; //兄弟结点是其父结点的左孩子//情况一:brother为红色if (brother->_col == RED) //brother为红色{delParentPos->_col = RED;brother->_col = BLACK;RotateR(delParentPos);//需要继续处理brother = delParentPos->_left; //更新brother(否则在本循环中执行其他情况的代码会出错)}//情况二:brother为黑色,且其左右孩子都是黑色结点或为空if (((brother->_left == nullptr) || (brother->_left->_col == BLACK))&& ((brother->_right == nullptr) || (brother->_right->_col == BLACK))){brother->_col = RED;if (delParentPos->_col == RED){delParentPos->_col = BLACK;break;}//需要继续处理delPos = delParentPos;delParentPos = delPos->_parent;}else{//情况三:brother为黑色,且其右孩子是红色结点,左孩子是黑色结点或为空if ((brother->_left == nullptr) || (brother->_left->_col == BLACK)){brother->_right->_col = BLACK;brother->_col = RED;RotateL(brother);//需要继续处理brother = delParentPos->_left; //更新brother(否则执行下面情况四的代码会出错)}//情况四:brother为黑色,且其左孩子是红色结点brother->_col = delParentPos->_col;delParentPos->_col = BLACK;brother->_left->_col = BLACK;RotateR(delParentPos);break; //情况四执行完毕后调整一定结束}}}}}//进行实际删除if (del->_left == nullptr) //实际删除结点的左子树为空{if (del == delP->_left) //实际删除结点是其父结点的左孩子{delP->_left = del->_right;if (del->_right)del->_right->_parent = delP;}else //实际删除结点是其父结点的右孩子{delP->_right = del->_right;if (del->_right)del->_right->_parent = delP;}}else //实际删除结点的右子树为空{if (del == delP->_left) //实际删除结点是其父结点的左孩子{delP->_left = del->_left;if (del->_left)del->_left->_parent = delP;}else //实际删除结点是其父结点的右孩子{delP->_right = del->_left;if (del->_left)del->_left->_parent = delP;}}delete del; //实际删除结点return true;}private://拷贝树Node* _Copy(Node* root, Node* parent){if (root == nullptr){return nullptr;}Node* copyNode = new Node(root->_data);copyNode->_parent = parent;copyNode->_left = _Copy(root->_left, copyNode);copyNode->_right = _Copy(root->_right, copyNode);return copyNode;}//析构函数子函数void _Destroy(Node* root){if (root == nullptr){return;}_Destroy(root->_left);_Destroy(root->_right);delete root;}//左单旋void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;Node* parentParent = parent->_parent;//建立subRL与parent之间的联系parent->_right = subRL;if (subRL)subRL->_parent = parent;//建立parent与subR之间的联系subR->_left = parent;parent->_parent = subR;//建立subR与parentParent之间的联系if (parentParent == nullptr){_root = subR;_root->_parent = nullptr;}else{if (parent == parentParent->_left){parentParent->_left = subR;}else{parentParent->_right = subR;}subR->_parent = parentParent;}}//右单旋void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;Node* parentParent = parent->_parent;//建立subLR与parent之间的联系parent->_left = subLR;if (subLR)subLR->_parent = parent;//建立parent与subL之间的联系subL->_right = parent;parent->_parent = subL;//建立subL与parentParent之间的联系if (parentParent == nullptr){_root = subL;_root->_parent = nullptr;}else{if (parent == parentParent->_left){parentParent->_left = subL;}else{parentParent->_right = subL;}subL->_parent = parentParent;}}//左右双旋void RotateLR(Node* parent){RotateL(parent->_left);RotateR(parent);}//右左双旋void RotateRL(Node* parent){RotateR(parent->_right);RotateL(parent);}Node* _root; //红黑树的根结点
};
相关文章:
【C++】:STL详解 —— 红黑树
目录 平衡二叉查找树 红黑树的概念 红黑树的五大性质 红黑树的效率 红黑树和AVL树的比较 插入与删除操作 内存与实现复杂度 经典性能数据对比 总结 对旋转的基本理解 旋转的作用 左旋(Left Rotation) 右旋(Right Rotation…...
)
蓝桥试题:蓝桥勇士(LIS)
一、题目描述 小明是蓝桥王国的勇士,他晋升为蓝桥骑士,于是他决定不断突破自我。 这天蓝桥首席骑士长给他安排了 N 个对手,他们的战力值分别为 a1,a2,...,an,且按顺序阻挡在小明的前方。对于这些对手小明可以选择挑战…...

Trae IDE新建C#工程
目录 1 结论 2 项目结构 3 项目代码 1 结论 新建C#工程来说,Trae的Chat比DeepSeek的Coder好用。 2 项目结构 MyWinFormsApp/ │ ├── Program.cs ├── Form1.cs ├── Form1.Designer.cs ├── MyResources/ │ └── MyResources.resx └── MyWin…...

Linux基础--进程管理
目录 静态查看进程 使用命令: ps 动态查看进程 使用命令: top 关闭进程: 使用命令: kill 查看进程占用端口 使用命令: ss 编辑 查看某端口是否被进程占用 使用命令: lsof 作业管理 进程后台运行: 使用命令: jobs 将后台进程调回前台 使用指令: fg 将前台进…...
)
Java面向对象(详细解释)
第一章 Static关键字 1.static的介绍以及基本使用 1.概述:static是一个静态关键字 2.使用: a.修饰一个成员变量: static 数据类型 变量名 b.修饰一个方法: 修饰符 static 返回值类型 方法名(形参){…...

qt ui相关的第三方库插件库
Qt UI相关的第三方库和插件库有很多,能帮助开发者提高开发效率,扩展UI功能,增强可用性和美观度。以下是一些常见的第三方库和插件: 1. QCustomPlot 功能:用于在Qt应用程序中创建交互式的二维绘图。特点:支…...

详解动态规划算法
动态规划 一、动态规划的核心思想二、动态规划的步骤1. 定义状态(State)2. 确定状态转移方程(State Transition Equation)3. 确定边界条件(Base Case)4. 填表(Table Filling)或递归计…...

LINUX网络基础 [五] - HTTP协议
目录 HTTP协议 预备知识 认识 URL 认识 urlencode 和 urldecode HTTP协议格式 HTTP请求协议格式 HTTP响应协议格式 HTTP的方法 HTTP的状态码 编辑HTTP常见Header HTTP实现代码 HttpServer.hpp HttpServer.cpp Socket.hpp log.hpp Makefile Web根目录 H…...

慕慕手记项目日志 项目从开发到部署多环境配置 2025-3-8
慕慕手记项目日志 项目从开发到部署多环境配置 2025-3-8 现在是已经到了课程的第十章了,开始进行配置项目环境了。现在要完成的任务是项目可以正常运行,而且可以自由切换配置,开发/测试。 下面是当前的目录结构图: 现在来解释一…...

华为配置篇-OSPF基础实验
OSPF 一、简述二、常用命令总结三、实验3.1 OSPF单区域3.2 OSPF多区域3.3 OSPF 的邻接关系和 LSA 置底 一、简述 OSPF(开放式最短路径优先协议) 基本定义 全称:Open Shortest Path First 类型:链路状态路由协议(IGP&…...

闭包:JavaScript 中的隐形大杀器
你可能已经在很多地方听说过闭包这个词,尤其是涉及到 JavaScript 的作用域和异步操作时。闭包是 JavaScript 中非常核心的概念,然而它又非常容易让开发者感到困惑。今天我们就来深入剖析闭包,帮助你真正理解它的工作原理,以及如何…...

【消息队列】数据库的数据管理
1. 数据库的选择 对于当前实现消息队列这样的一个中间件来说,具体要使用哪个数据库,是需要稍作考虑的,如果直接使用 MySQL 数据库也是能实现正常的功能,但是 MySQL 也是一个客户端服务器程序,也就意味着如果想在其他服…...

玩转ChatGPT:GPT 深入研究功能
一、写在前面 民间总结: 理科看Claude 3.7 Sonnet 文科看DeepSeek-R1 那么,ChatGPT呢? 看Deep Research(深入研究)功能。 对于科研狗来说,在这个文章爆炸的时代,如何利用AI准确、高效地收…...

Centos8部署mongodb报错记录
使用mongo ops安装mongodb6.0.4副本集报错 error while loading shared libraries: libnetsnmpmibs.so.35: cannot open shared object file: No such file or directory 解决 yum install net-snmp net-snmp-devel -y建议:初始化系统时把官网上的依赖包都装一遍 即…...

2024四川大学计算机考研复试上机真题
2024四川大学计算机考研复试上机真题 2024四川大学计算机考研复试机试真题 历年四川大学计算机考研复试机试真题 在线评测:https://app2098.acapp.acwing.com.cn/ 分数求和 题目描述 有一分数序列: 2/1 3/2 5/3 8/5 13/8 21/13… 求出这个数列的前 …...
)
前端面试题 口语化复述解答(从2025.3.8 开始频繁更新中)
背景 看了很多面试题及其答案。但是过于标准化,一般不能直接用于回复面试官,这里我将总结一系列面试题,用于自我复习也乐于分享给大家,欢迎大家提供建议,我必不断完善之。 Javascript ES6 1. var let const 的区别…...
更多文章请查看
更多文章知识请移步至下面链接,期待你的关注 如需查看新文章,请前往: 博主知识库https://www.yuque.com/xinzaigeek...

vulnhub靶场之【digitalworld.local系列】的vengeance靶机
前言 靶机:digitalworld.local-vengeance,IP地址为192.168.10.10 攻击:kali,IP地址为192.168.10.6 kali采用VMware虚拟机,靶机选择使用VMware打开文件,都选择桥接网络 这里官方给的有两种方式ÿ…...

MySql的安装及数据库的基本操作命令
1.MySQL的安装 1.1进入MySQL官方网站 1.2点击下载 1.3下拉选择MySQL社区版 1.4选择你需要下载的版本及其安装的系统和下载方式 直接安装以及压缩包 建议选择8.4.4LST LST表明此版本为长期支持版 新手建议选择红框勾选的安装方式 1.5 安装包下载完毕之后点击安装 2.数据库…...

中性点直接接地电网接地故障Simulink仿真
1.模型简介 本仿真模型基于MATLAB/Simulink(版本MATLAB 2017Ra)软件。建议采用matlab2017 Ra及以上版本打开。(若需要其他版本可联系代为转换) 2.系统仿真图: 3.中性点直接接地电网接地故障基本概念(本仿…...

Postman+Newman自动化测试报告生成全攻略:让微信小程序接口回归测试5分钟搞定
PostmanNewman自动化测试报告生成全攻略:让微信小程序接口回归测试5分钟搞定 在追求研发效能的今天,手工重复执行接口测试已成为效率瓶颈。想象一下:每次微信小程序迭代更新,测试工程师都需要在Postman中逐个点击上百个接口用例&a…...

GraphRAG 深度解析:把知识图谱接进检索链路,多跳推理准确率从 50% 提到 85%
很多同学搭完向量 RAG 之后,调了无数遍 Chunk 大小、换了好几个 Embedding 模型,多跳推理准确率就是卡在 50% 左右,怎么都上不去。比如「A 公司 CTO 和 B 公司 CEO 到底有什么合作关系」这类问题,答案散落在三个文档里,…...

Python 性能分析:工具与方法
Python 性能分析:工具与方法 1. 技术分析 1.1 性能分析概述 性能分析是定位代码瓶颈的关键: 性能分析层次CPU分析: 定位CPU密集型操作内存分析: 检测内存泄漏IO分析: 发现IO瓶颈线程分析: 排查并发问题1.2 性能分析工具 工具类型功能适用场景cProfileCPU…...

构建多模型备用策略时Taotoken的聚合与路由能力价值
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 构建多模型备用策略时Taotoken的聚合与路由能力价值 在构建依赖大模型能力的生产应用时,服务的稳定性是核心考量之一。…...

如何让GPT-3开口说话?揭秘微调技巧,打造你的专属AI模型!
本文详细介绍了微调技术在AI模型中的应用,通过将通用模型如GPT-3进行微调,可以使其适应特定任务,如ChatGPT或GitHub Copilot。微调与普通提示词工程最大的区别在于,它能真正让模型学会数据,而非仅仅是“看到”数据。文…...

2026 云手机横评:傲晨云、红手指、川川云、雷电云实测,全能首选一目了然
一、测评背景与说明随着手游挂机、账号多开、云端办公等需求爆发,云手机已成为个人玩家与工作室的必备工具。当前市场品牌繁杂,傲晨云、红手指、川川云、雷电云是关注度较高的四款产品,它们在性能、稳定性、功能及价格上差异显著。本次测评基…...

终极Windows热键冲突解决方案:Hotkey Detective一键定位占用程序
终极Windows热键冲突解决方案:Hotkey Detective一键定位占用程序 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective …...

Netflix 4K画质与杜比音效优化指南:解锁你的流媒体最佳体验
Netflix 4K画质与杜比音效优化指南:解锁你的流媒体最佳体验 【免费下载链接】netflix-4K-DDplus MicrosoftEdge(Chromium core) extension to play Netflix in 4K(Restricted)and DDplus audio 项目地址: https://gitcode.com/gh_mirrors/n…...

Boss-Key:办公隐私保护神器,一键隐藏敏感窗口的智能解决方案
Boss-Key:办公隐私保护神器,一键隐藏敏感窗口的智能解决方案 【免费下载链接】Boss-Key 老板来了?快用Boss-Key老板键一键隐藏静音当前窗口!上班摸鱼必备神器 项目地址: https://gitcode.com/gh_mirrors/bo/Boss-Key 在当今…...

一站式Steam Deck控制器配置方案:Windows平台完整游戏体验指南
一站式Steam Deck控制器配置方案:Windows平台完整游戏体验指南 【免费下载链接】steam-deck-windows-usermode-driver A windows usermode controller driver for the steam deck internal controller. 项目地址: https://gitcode.com/gh_mirrors/st/steam-deck-w…...