【1041. 困于环中的机器人】
来源:力扣(LeetCode)
描述:
在无限的平面上,机器人最初位于 (0, 0) 处,面朝北方。注意:
- 北方向 是 y 轴的正方向。
- 南方向 是 y 轴的负方向。
- 东方向 是 x 轴的正方向。
- 西方向 是 x 轴的负方向。
机器人可以接受下列三条指令之一:
"G":直走 1 个单位"L":左转 90 度"R":右转 90 度
机器人按顺序执行指令 instructions,并一直重复它们。
只有在平面中存在环使得机器人永远无法离开时,返回 true。否则,返回 false。
示例 1:
输入:instructions = "GGLLGG"
输出:true
解释:机器人最初在(0,0)处,面向北方。
“G”:移动一步。位置:(0,1)方向:北。
“G”:移动一步。位置:(0,2).方向:北。
“L”:逆时针旋转90度。位置:(0,2).方向:西。
“L”:逆时针旋转90度。位置:(0,2)方向:南。
“G”:移动一步。位置:(0,1)方向:南。
“G”:移动一步。位置:(0,0)方向:南。
重复指令,机器人进入循环:(0,0)——>(0,1)——>(0,2)——>(0,1)——>(0,0)。
在此基础上,我们返回true。
示例 2:
输入:instructions = "GG"
输出:false
解释:机器人最初在(0,0)处,面向北方。
“G”:移动一步。位置:(0,1)方向:北。
“G”:移动一步。位置:(0,2).方向:北。
重复这些指示,继续朝北前进,不会进入循环。
在此基础上,返回false。
示例 3:
输入:instructions = "GL"
输出:true
解释:机器人最初在(0,0)处,面向北方。
“G”:移动一步。位置:(0,1)方向:北。
“L”:逆时针旋转90度。位置:(0,1).方向:西。
“G”:移动一步。位置:(- 1,1)方向:西。
“L”:逆时针旋转90度。位置:(- 1,1)方向:南。
“G”:移动一步。位置:(- 1,0)方向:南。
“L”:逆时针旋转90度。位置:(- 1,0)方向:东方。
“G”:移动一步。位置:(0,0)方向:东方。
“L”:逆时针旋转90度。位置:(0,0)方向:北。
重复指令,机器人进入循环:(0,0)——>(0,1)——>(- 1,1)——>(- 1,0)——>(0,0)。
在此基础上,我们返回true。
提示:
- 1 <= instructions.length <= 100
- instructions[i] 仅包含 ‘G’, ‘L’, ‘R’
方法:模拟
思路
当机器人执行完指令 instructions 后,它的位置和方向均有可能发生变化。
- 如果它的位置仍位于原点,那么不管它此时方向是什么,机器人都将永远无法离开。
- 如果它的位置不在原点,那么需要考虑此时机器人的方向:
- 如果机器人仍然朝北,那么机器人可以不会陷入循环。假设执行完一串指令后,机器人的位置是 (x, y) 且不为原点,方向仍然朝北,那么执行完第二串指令后,机器人的位置便成为 (2 × x, 2 × y),会不停地往外部移动,不会陷入循环。
- 如果机器人朝南,那么执行第二串指令时,机器人的位移会与第一次相反,即第二次的位移是 (−x, −y),并且结束后会回到原来的方向。这样一来,每两串指令之后,机器人都会回到原点,并且方向朝北,机器人会陷入循环。
- 如果机器人朝东,即右转了 90°。这样一来,每执行一串指令,机器人都会右转 90°。那么第一次和第三次指令的方向是相反的,第二次和第四次指令的方向是相反的,位移之和也为 0,这样一来,每四次指令之后,机器人都会回到原点,并且方向朝北,机器人会陷入循环。如果机器人朝西,也是一样的结果。
因此,机器人想要摆脱循环,在一串指令之后的状态,必须是不位于原点且方向朝北。
代码:
class Solution {
public:bool isRobotBounded(string instructions) {vector<vector<int>> direc {{0, 1}, {1, 0}, {0, -1}, {-1, 0}};int direcIndex = 0;int x = 0, y = 0;for (char instruction : instructions) {if (instruction == 'G') {x += direc[direcIndex][0];y += direc[direcIndex][1];} else if (instruction == 'L') {direcIndex += 3;direcIndex %= 4;} else {direcIndex++;direcIndex %= 4;}}return direcIndex != 0 || (x == 0 && y == 0);}
};
执行用时:0 ms, 在所有 C++ 提交中击败了100.00%的用户
内存消耗:6 MB, 在所有 C++ 提交中击败了44.94%的用户
复杂度分析
时间复杂度:O(n),其中 n 是 instructions 的长度,需要遍历 instructions 一次。
空间复杂度:O(1),只用到常数空间。
author:LeetCode-Solution
相关文章:

【1041. 困于环中的机器人】
来源:力扣(LeetCode) 描述: 在无限的平面上,机器人最初位于 (0, 0) 处,面朝北方。注意: 北方向 是 y 轴的正方向。南方向 是 y 轴的负方向。东方向 是 x 轴的正方向。西方向 是 x 轴的负方向。 机器人可…...
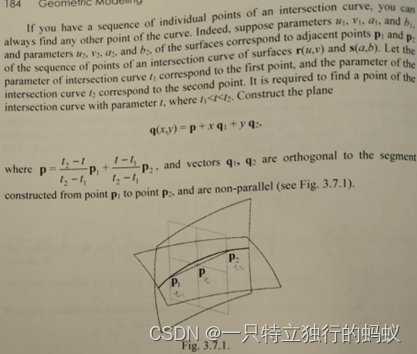
几何算法——4.交线(intersection curve)的表达与参数化、微分性质
几何算法——4.曲面求交的交线(intersection curve)的表达与参数化、微分性质1 关于曲面求交的交线表达2 交线的微分性质3 交线的参数化4 修正弦长参数化的微分性质1 关于曲面求交的交线表达 两个曲面求交,比较经典的方法是用跟踪法…...
【GPT】让你事半功倍特别好用的5个GPT工具
文章目录前言一、现在还能开通ChatGPT4.0吗?二、推荐五款与ChatGPT的相关实用工具1.一款浏览器插件:ChatGPT for Google2.一款生成图片的AI工具:midjourney3.推荐两款AI自动生成PPT:闪击PPT、mindshow4.识别PFD文件内容对话&#…...
人工智能大模型多场景应用原理解析
前言 在上篇文章《人工智能大模型之ChatGPT原理解析》中分享了一些大模型之ChatGPT的核心原理后,收到大量读者的反馈,诸如:在了解了核心原理后想进一步了解未来的发展趋势(比如生成式人工智能和元宇宙能擦出什么样的火花?),大模型…...
SpringBoot默认包扫描机制与默认配置文件
文章目录一、SpringBoot默认包扫描机制 - 示例二、SpringBoot默认扫描包机制 - 原理三、SpringBoot手动扫描包机制 - 原理&示例四、ComponentScan与MapperScan五、SpringBoot默认配置文件一、SpringBoot默认包扫描机制 - 示例 默认情况下,扫描启动类同级及其子…...
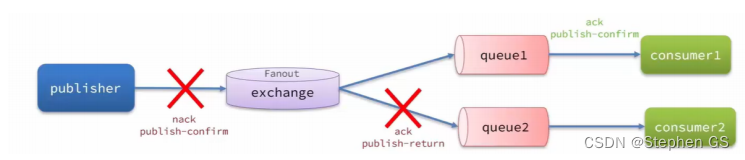
RabbitMq 消息可靠性问题(一) --- publisher发送时丢失
前言 消息从生产者发送到exchange, 再到 queue, 再到消费者。这个过程中有哪些有消息丢失的可能性呢? 发送时丢失: 生产者发送的消息未送达 exchange消息到达 exchange 后未到达 queue MQ 宕机,queue将消息丢失consumer 接收到消息后未消费…...

Java初识泛型
目录 一、包装类 1、基本数据类型和对应的包装类 2、装箱和拆箱 3、自动装箱和自动拆箱 二、什么是泛型 三、引出泛型 1、泛型的语法 四、泛型类的使用 1、语法 2、示例 3、类型推导(Type Inference) 六、泛型如何编译的 1、擦除机制 2、为什么不能实例化泛型类…...
寸照换底色技巧大全,超详细图文教程
在日常的设计工作中,我们常常需要将图片的背景色进行修改,以适应不同的场景和需求。其中最常用的方法就是寸照换底色技巧。本文将为大家介绍一些常见的寸照换底色技巧,并提供超详细的图文教程,帮助大家轻松完成这项任务。 一、使…...
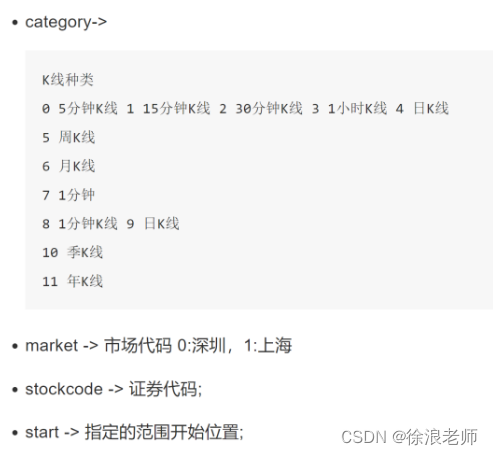
这篇文章价值很大:股票历史分时成交数据怎么简单获取?【干货】
文章目录前言一、准备二、使用步骤1.引入库2,使用这个API查询历史分时数据:3.查询完整历史分时数据4.其他查询方法参数格式:[(市场代码, 股票代码), ...]参数:市场代码, 股票代码, 文件名, 起始位置, 数量参数:市场代码…...
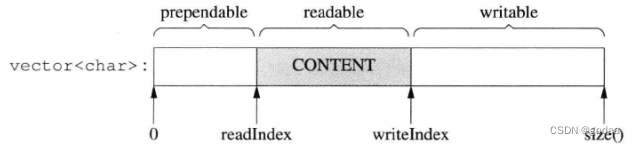
muduo源码剖析--Buffer
Buffer类 Buffer类是自定义处理数据输入缓冲的类,底层是vector< char >,通过readIdx和writeIdx将缓冲区分为3个部分,第一部分是预留的8字节已经读出的缓冲区字节数、第二部分是还未读出的部分、第三部分是可写的部分。 Buffer类的设计…...

AI人工智能简介和其定义
全称:人工智能(Artificial Intelligence) 缩写:AI / ai 人工智能研究 亦称智械、机器智能,指由人制造出来的可以表现出智能的机器。通常人工智能是指通过普通计算机程序来呈现人类智能的技术。该词也指出研究这样的智…...
python数据清洗
数据清洗包括:空值,异常值,重复值,类型转换和数据整合这里数据清洗需要用到的库是pandas库,下载方式还是在终端运行 : pip install pandas.首先我们需要对数据进行读取import pandas as pddata pd.read_cs…...
 方法、Python3 os.read() 方法)
Python3 os.makedirs() 方法、Python3 os.read() 方法
Python3 os.makedirs() 方法 概述 os.makedirs() 方法用于递归创建目录。像 mkdir(), 但创建的所有intermediate-level文件夹需要包含子目录。 语法 makedirs()方法语法格式如下: os.makedirs(path, mode0o777)参数 path -- 需要递归创建的目录。 mode -- 权限…...
【Linux安装数据库】Ubuntu安装mysql并连接navicat
Linux系统部署Django项目 文章目录Linux系统部署Django项目一、mysql安装二、mysql配置文件三、新建数据库和用户四、nivacat链接mysql一、mysql安装 linux安装mysql数据库有很多教程,根据安装方式不同,相关的步骤也不同。可以参考:【Linux安…...

GaussDB工作级开发者认证—第一章GaussDB数据库介绍
一. GaussDB概述 GaussDB是华为基于openGauss自研生态推出的企业级分布式关系型数据库。具备企业级复杂事物混合负载能力,同时支持分布式事务强一致性,同城跨AZ部署,数据0丢失,支持1000的计算节点扩展能力,4PB海量存储…...

阿里张勇:所有行业都值得用大模型重新做一遍!
数据智能产业创新服务媒体——聚焦数智 改变商业“2023阿里云峰会”于4月11日在北京国际会议中心隆重召开,本次峰会以" 与实俱进 为创新提速!"为主题,阿里巴巴集团董事会主席兼首席执行官张勇、阿里云智能集团首席技术官周靖人、…...
)
ES6(字符串的扩展与新增方法)
字符串的扩展与新增方法 1. 模板字符串 模板字符串解决了之前的字符串拼接 ESC下那个键:反引号()包裹>替换引号 ${变量名/表达式/函数}>替换引引加加导致的代码冗余 //ES5(引引加加) $(#result).append(There are <b> basket.c…...

rk3568点亮LCD(lvds)
rk3568 Android11/12 适配 lvds 屏 LVDS(Low Voltage Differential Signal)即低电压差分信号。1994年由美国国家半导体(NS)公司为克服以TTL电平方式传输宽带高码率数据时功耗大、电磁干扰大等缺点而研制的一种数字视频信号传输方…...

全终端办公电子邮件集成方案
面临挑战 应用场景复杂,经常需要在不同终端进行切换,多屏、跨屏及移动办公要求高; 业务系统较多,需要同时支持多种业务的开展,对第三方应用集成及协同办公要求高; 对邮件系统的稳定及高效性要求高&#x…...

再不转型为ChatGPT程序员,有遭受降维打击的危险
Open AI在演示GPT-4的时候,有这么一个场景:给一个界面草图,就可以生成网页代码。这个演示非常简单,如果界面原型比较复杂呢?像这样:ChatGPT能不能直接生成HTML, CSS,JavaScript代码,把这个网页给…...

MoviePilot媒体元数据服务连接异常的技术诊断与系统解决方案
MoviePilot媒体元数据服务连接异常的技术诊断与系统解决方案 【免费下载链接】MoviePilot NAS媒体库自动化管理工具 项目地址: https://gitcode.com/gh_mirrors/mo/MoviePilot MoviePilot作为专业的NAS媒体库自动化管理工具,其核心功能依赖于TheMovieDb&…...

观察使用Taotoken Token Plan套餐后月度API成本的变化趋势
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察使用Taotoken Token Plan套餐后月度API成本的变化趋势 对于个人开发者或小型团队而言,在项目开发中持续使用大模型…...
:从模糊描述到博物馆级输出的9类失效提示词避坑清单)
Midjourney后印象派风格实战手册(2024最新版):从模糊描述到博物馆级输出的9类失效提示词避坑清单
更多请点击: https://intelliparadigm.com 第一章:后印象派风格的本质解构与Midjourney语义映射 后印象派并非单一技法流派,而是一场以主观表达重构视觉真实性的认知革命。其核心在于色彩的情感自主性、形体的结构性简化,以及空间…...

ARM架构TRFCR_EL2寄存器解析与虚拟化调试应用
1. ARM架构TRFCR_EL2寄存器深度解析在ARMv8/v9体系结构中,TRFCR_EL2(Trace Filter Control Register at EL2)是一个关键的系统寄存器,专门用于管理EL2(Hypervisor)级别的追踪过滤行为。这个寄存器在虚拟化环…...

Python视频自动化处理:基于FFmpeg与OpenCV的编程式剪辑框架实践
1. 项目概述与核心价值最近在折腾视频剪辑自动化流程,发现了一个挺有意思的开源项目AmitDigga/fabric-video-editor。这名字一看就带着点“缝合怪”的味道,fabric这个词在编程领域通常指代一个框架或结构,而video-editor则直指视频编辑。简单…...

Beyond Compare 5密钥生成终极指南:快速激活与完全使用教程
Beyond Compare 5密钥生成终极指南:快速激活与完全使用教程 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen Beyond Compare是一款广受欢迎的文件对比工具,但当30天试用期…...

国密SM2的P7格式签名,和PKCS#7到底有啥区别?一张图讲清楚
国密SM2的P7格式签名与PKCS#7核心差异解析:从结构到实战 在密码学应用开发中,数字签名格式的标准化是实现安全通信的基础。当开发者从国际通用的PKCS#7标准转向中国自主研发的国密SM2算法体系时,P7签名格式的差异往往成为第一个需要跨越的技术…...

Beyond Compare 5 开源密钥生成器:逆向工程与授权机制的深度解析
Beyond Compare 5 开源密钥生成器:逆向工程与授权机制的深度解析 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen 在软件安全与逆向工程领域,授权验证机制始终是开发者与安…...

基于规则引擎的自动化文件管理工具smartcat实战指南
1. 项目概述:一个智能化的文件分类与归档工具最近在整理个人电脑和服务器上的文件时,我又一次陷入了混乱。下载文件夹里塞满了各种格式的文档、图片、压缩包,项目目录下混杂着不同版本的代码、设计稿和会议记录。手动分类不仅耗时,…...

JSON Schema驱动智能体交互:构建结构化协作的接口契约
1. 项目概述:一个为智能体交互而生的“接口契约” 在构建基于大型语言模型的智能体(Agent)系统时,我们常常会遇到一个核心痛点:如何让智能体之间、智能体与工具之间、甚至是智能体与外部系统之间,进行结构…...