【状态估计】电力系统状态估计的虚假数据注入攻击建模与对策(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
文献来源:

文献分享阅读:
我用夸克网盘分享了「【状态估计】电力系统状态估计的虚假数据注入攻击建模与对策.pdf」,点击链接即可保存。打开「夸克APP」在线查看,支持多种文档格式转换。
链接:夸克网盘分享
提取码:4vRm
虚假数据注入攻击(FDIA)已被证明是对抗电力系统的严重安全挑战之一。这正成为电力公司日益关注的问题,最近引起了电力系统研究人员和工程师的注意。因此,电力系统运行和规划中的状态估计是监测和控制系统通过电表测量和电力系统拓扑估计电力系统最佳状态的重要和必不可少的工具。因此,本文提出了避免系统内不必要的完全停电的建模和对策。本文还考虑了输电和配电系统对FDIA的脆弱性。本文的结果可为制定针对电力系统网络漏洞的必要保护对策奠定基础。
原文摘要:
Abstract:
False Data Injection Attacks (FDIA) has been shown to be one of the serious security challenges combating power systems. This is becoming a grown concern to power utilities and has drawn the attention of power system researchers and Engineers in recent times. State estimation in power system operation and planning is therefore an important and an essential tool for monitoring and controlling the system to estimate the best state of the power system through meter measurements and power system topologies. This paper therefore presents the modeling and countermeasures for avoiding unnecessary total blackout within the system. The vulnerability of both the Transmission and the distribution power system to FDIA is also considered in this paper. The outcomes of this paper could serve as a basis for the development of necessary protective countermeasures against vulnerabilities within power system networks.
确保任何系统的数据完整性和安全性对于安全运行和保护系统免受操纵至关重要。随着传统电网被智能电网取代,这就构成了电网容易受到网络攻击的情况[1]。智能电网作为国家关键基础设施,是一个将网络和物理系统集成在一起的系统,该系统的不同部分之间不断通信。因此,确保数据完整性并保护系统免受操纵非常重要。物联网(IoT)的应用使通信链路和整个电力系统容易受到攻击。电网不能被描述为传统的网络系统,而是一个信息物理系统,其特征是网络和物理系统之间的通信或集成[2]。智能电网带来的进步在自动化、电网监控和管理、智能计量基础设施和客户端管理领域值得称赞。由此产生的电力系统的通信网络更容易受到入侵者的攻击和操纵[2]。
智能电网的一个重要元素是状态估计。状态估计的输入仅限于负载总线上的P,Q注入和电压控制总线上的P,V值。需要状态估计有两个原因。首先,来自远程终端单元(RTU)和传感器等现场设备的测量被认为是有噪声的,并且包含一些误差。其次,在潮流的情况下,测量值包含一些变量,例如P,Q线流,这些变量对于潮流计算不是必需的。因此,运行状态的最佳估计是通过状态估计获得的,并且该估计值在被接受之前需要进行统计分析[3]。
电力系统由能源管理系统(EMS)或监督控制和数据采集(SCADA)系统持续监测和控制,这些系统需要状态估计器的输入来维持电力系统的运行状态。SCADA系统从现场设备(如网络中的传感器)收集测量值。传感器测量值用作状态估计器的输入。状态估计器根据这些测量值估计电力系统的真实状态。状态估计器的输出是一些电压幅度和相位角。控制动作和能量管理系统依赖于状态估计器的输出,以实现电力系统的安全运行。因此,状态估计使用来自仪表测量的数据,计算这些测量的最佳估计值,然后将结果用于控制网格。因此,状态估计在电力系统监测和控制中起着重要作用[3] [4]。
状态估计给出了电力系统真实状态的估计,大多数控制动作、研究和系统操作都依赖于状态估计。对电力系统状态估计的攻击往往会危及电网。电力系统模型可以是交流或直流,其中交流模型同时考虑实际功率和无功功率,因此该模型的方程变为非线性。对于简化的直流模型,方程是线性的,不需要迭代。
电网对攻击的敏感性是由于电网作为网络物理系统的架构,通信链路更容易受到网络物理攻击。配备智能电表的先进计量系统基础设施的引入在实现智能电网方面发挥了重要作用。然而,由于电网上有许多输入或插座可用,系统就越脆弱[4]。
针对电网的攻击之一是虚假数据注入攻击(FDIA)。FDIA 是一种针对电力系统中状态估计的数据完整性攻击,攻击者会破坏传感器节点。大多数情况下,攻击者操纵和误导系统操作员发出不准确的命令,如果不快速检测和控制,会导致电力系统停电[6]。因此,FDIA的后果是重大设备故障和完全停电。通过破坏智能电表测量、传感器或远程终端单元 (RTU) 或侵入网络上的监控通信 [7],可能会注入虚假数据。
攻击者可以插入通常不会被BDD检测到的测量值[8]。了解电力系统的当前配置可能会导致BDD的当前实现无法检测到攻击,因为攻击者希望注入与估计状态密切相关的数据。大多数BDD技术基于最小加权平方法。了解电源系统配置肯定会违反这种方法。许多研究表明,保护一些战略性选择的仪表测量值,以防止FDIA [4],[9],[10]。确定一组仪表测量值,以便攻击者注入 FDA 所需的矢量受到限制是一种很好的做法。但是,这种方法不会完全使系统免受攻击,并且必须始终提供受保护传感器的测量值。对于实际系统,可能无法实现仪表免受攻击的绝对保护。由于SCADA设备和网络拓扑各不相同,因此正确监控系统以确定最合适的FDIA实施非常重要。因此,需要制定超越这些传统方法的检测方法,因为攻击者可以利用最小二乘法允许的误差范围之间的测量而不会被检测到[6]。
因此,考虑到电网作为国家关键基础设施的重要性以及FDIA对电力系统的严重影响,确保数据完整性和电网保护非常重要[5]。网络计算应用带来的自动化导致电网容易受到网络攻击。就像传统的网络系统一样,系统上可用的许多插座或连接链接往往会增加其漏洞[1]。针对状态估计的虚假数据注入攻击 (FDIA) 被证明是攻击者通过向电力系统注入错误或错误仪表测量来破坏电力系统运行的一种方式。
大多数系统参数(如系统稳定性和控制)都取决于状态估计。状态估计参数是做出基于系统的物理系统稳定性和控制决策所必需的。FDIA可能会误导系统运营商根据注入的数据做出不准确的决策。最近,已经证明虚假数据注入(FDI)攻击可以绕过当今EMS / SCADA系统中的错误数据检测(BDD)而不会被发现[2] [8] [11]。
📚2 运行结果
Del = 180/pi*del;
E2 = [V Del]; % Bus Voltages and angles..
disp('-------- State Estimation ------------------');
disp('--------------------------');
disp('| Bus | V | Angle | ');
disp('| No | pu | Degree | ');
disp('--------------------------');
for m = 1:numfprintf('%4g', m); fprintf(' %8.4f', V(m)); fprintf(' %8.4f', Del(m)); fprintf('\n');
end
disp('---------------------------------------------');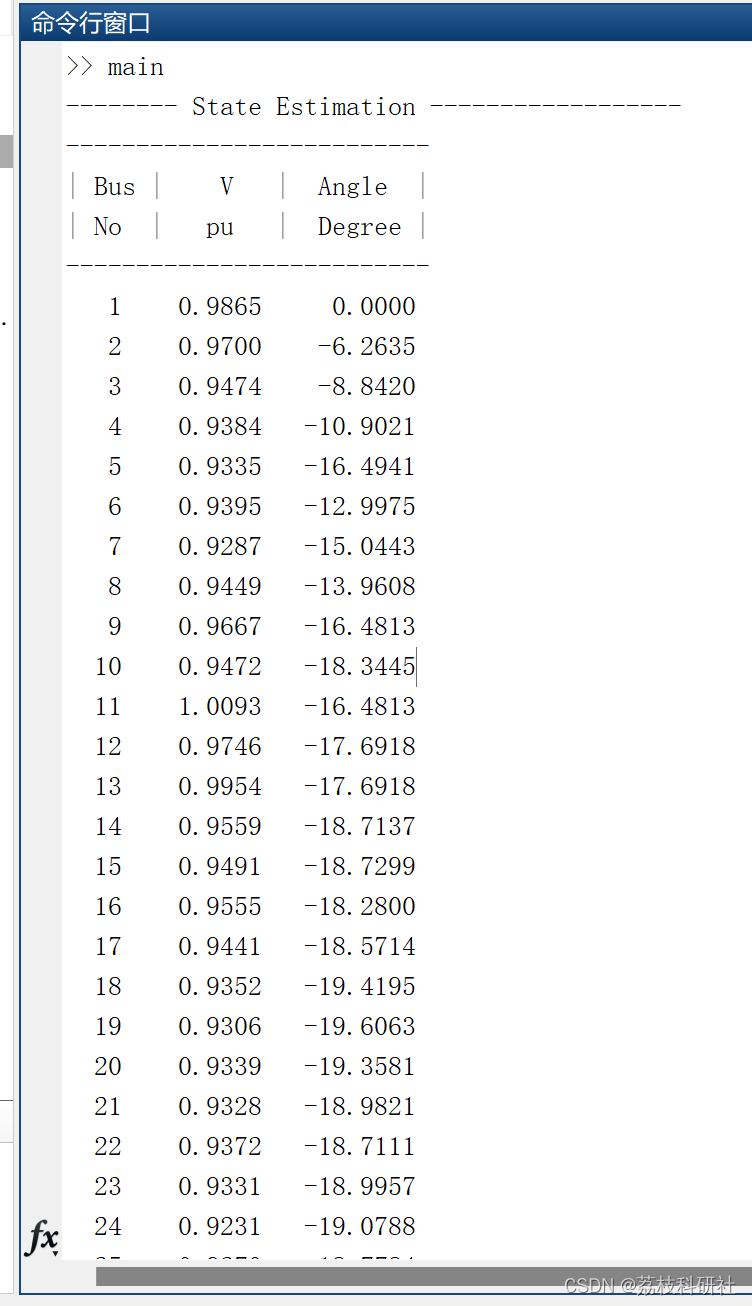


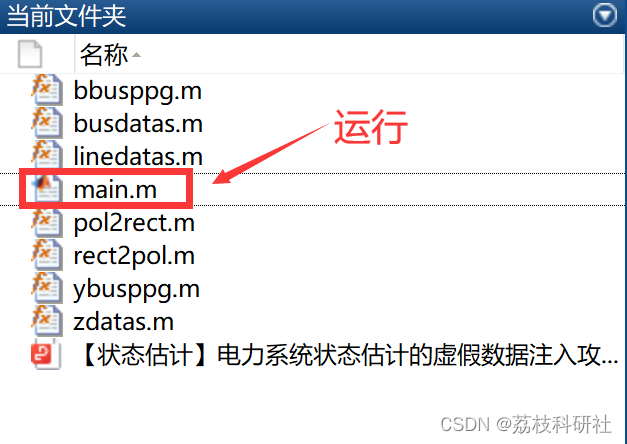
主函数代码:
% Power System State Estimation using Weighted Least Square Method..
num = 30; % IEEE - 14 or IEEE - 30 bus system..(for IEEE-14 bus system replace 30 by 14)...
ybus = ybusppg(num); % Get YBus..
zdata = zdatas(num); % Get Measurement data..
bpq = bbusppg(num); % Get B data..
nbus = max(max(zdata(:,4)),max(zdata(:,5))); % Get number of buses..
type = zdata(:,2); % Type of measurement, Vi - 1, Pi - 2, Qi - 3, Pij - 4, Qij - 5, Iij - 6..
z = zdata(:,3); % Measuement values..
fbus = zdata(:,4); % From bus..
tbus = zdata(:,5); % To bus..
Ri = diag(zdata(:,6)); % Measurement Error..
V = ones(nbus,1); % Initialize the bus voltages..
del = zeros(nbus,1); % Initialize the bus angles..
E = [del(2:end); V]; % State Vector..
G = real(ybus);
B = imag(ybus);vi = find(type == 1); % Index of voltage magnitude measurements..
ppi = find(type == 2); % Index of real power injection measurements..
qi = find(type == 3); % Index of reactive power injection measurements..
pf = find(type == 4); % Index of real powerflow measurements..
qf = find(type == 5); % Index of reactive powerflow measurements..nvi = length(vi); % Number of Voltage measurements..
npi = length(ppi); % Number of Real Power Injection measurements..
nqi = length(qi); % Number of Reactive Power Injection measurements..
npf = length(pf); % Number of Real Power Flow measurements..
nqf = length(qf); % Number of Reactive Power Flow measurements..iter = 1;
tol = 5;while(tol > 1e-4)
%Measurement Function, h
h1 = V(fbus(vi),1);
h2 = zeros(npi,1);
h3 = zeros(nqi,1);
h4 = zeros(npf,1);
h5 = zeros(nqf,1);
for i = 1:npi
m = fbus(ppi(i));
for k = 1:nbus
h2(i) = h2(i) + V(m)*V(k)*(G(m,k)*cos(del(m)-del(k)) + B(m,k)*sin(del(m)-del(k)));
end
end
for i = 1:nqi
m = fbus(qi(i));
for k = 1:nbus
h3(i) = h3(i) + V(m)*V(k)*(G(m,k)*sin(del(m)-del(k)) - B(m,k)*cos(del(m)-del(k)));
end
end
for i = 1:npf
m = fbus(pf(i));
n = tbus(pf(i));
h4(i) = -V(m)^2*G(m,n) - V(m)*V(n)*(-G(m,n)*cos(del(m)-del(n)) - B(m,n)*sin(del(m)-del(n)));
end
for i = 1:nqf
m = fbus(qf(i));
n = tbus(qf(i));
h5(i) = -V(m)^2*(-B(m,n)+bpq(m,n)) - V(m)*V(n)*(-G(m,n)*sin(del(m)-del(n)) + B(m,n)*cos(del(m)-del(n)));
end
h = [h1; h2; h3; h4; h5];
% Residue..
r = z - h;
% Jacobian..
% H11 - Derivative of V with respect to angles.. All Zeros
H11 = zeros(nvi,nbus-1);% H12 - Derivative of V with respect to V..
H12 = zeros(nvi,nbus);
for k = 1:nvi
for n = 1:nbus
if n == k
H12(k,n) = 1;
end
end
end% H21 - Derivative of Real Power Injections with Angles..
H21 = zeros(npi,nbus-1);
for i = 1:npi
m = fbus(ppi(i));
for k = 1:(nbus-1)
if k+1 == m
for n = 1:nbus
H21(i,k) = H21(i,k) + V(m)* V(n)*(-G(m,n)*sin(del(m)-del(n)) + B(m,n)*cos(del(m)-del(n)));
end
H21(i,k) = H21(i,k) - V(m)^2*B(m,m);
else
H21(i,k) = V(m)* V(k+1)*(G(m,k+1)*sin(del(m)-del(k+1)) - B(m,k+1)*cos(del(m)-del(k+1)));
end
end
end
% H22 - Derivative of Real Power Injections with V..
H22 = zeros(npi,nbus);
for i = 1:npi
m = fbus(ppi(i));
for k = 1:(nbus)
if k == m
for n = 1:nbus
H22(i,k) = H22(i,k) + V(n)*(G(m,n)*cos(del(m)-del(n)) + B(m,n)*sin(del(m)-del(n)));
end
H22(i,k) = H22(i,k) + V(m)*G(m,m);
else
H22(i,k) = V(m)*(G(m,k)*cos(del(m)-del(k)) + B(m,k)*sin(del(m)-del(k)));
end
end
end
% H31 - Derivative of Reactive Power Injections with Angles..
H31 = zeros(nqi,nbus-1);
for i = 1:nqi
m = fbus(qi(i));
for k = 1:(nbus-1)
if k+1 == m
for n = 1:nbus
H31(i,k) = H31(i,k) + V(m)* V(n)*(G(m,n)*cos(del(m)-del(n)) + B(m,n)*sin(del(m)-del(n)));
end
H31(i,k) = H31(i,k) - V(m)^2*G(m,m);
else
H31(i,k) = V(m)* V(k+1)*(-G(m,k+1)*cos(del(m)-del(k+1)) - B(m,k+1)*sin(del(m)-del(k+1)));
end
end
end
% H32 - Derivative of Reactive Power Injections with V..
H32 = zeros(nqi,nbus);
for i = 1:nqi
m = fbus(qi(i));
for k = 1:(nbus)
if k == m
for n = 1:nbus
H32(i,k) = H32(i,k) + V(n)*(G(m,n)*sin(del(m)-del(n)) - B(m,n)*cos(del(m)-del(n)));
end
H32(i,k) = H32(i,k) - V(m)*B(m,m);
else
H32(i,k) = V(m)*(G(m,k)*sin(del(m)-del(k)) - B(m,k)*cos(del(m)-del(k)));
end
end
end
% H41 - Derivative of Real Power Flows with Angles..
H41 = zeros(npf,nbus-1);
for i = 1:npf
m = fbus(pf(i));
n = tbus(pf(i));
for k = 1:(nbus-1)
if k+1 == m
H41(i,k) = V(m)* V(n)*(-G(m,n)*sin(del(m)-del(n)) + B(m,n)*cos(del(m)-del(n)));
else if k+1 == n
H41(i,k) = -V(m)* V(n)*(-G(m,n)*sin(del(m)-del(n)) + B(m,n)*cos(del(m)-del(n)));
else
H41(i,k) = 0;
end
end
end
end
% H42 - Derivative of Real Power Flows with V..
H42 = zeros(npf,nbus);
for i = 1:npf
m = fbus(pf(i));
n = tbus(pf(i));
for k = 1:nbus
if k == m
H42(i,k) = -V(n)*(-G(m,n)*cos(del(m)-del(n)) - B(m,n)*sin(del(m)-del(n))) - 2*G(m,n)*V(m);
else if k == n
H42(i,k) = -V(m)*(-G(m,n)*cos(del(m)-del(n)) - B(m,n)*sin(del(m)-del(n)));
else
H42(i,k) = 0;
end
end
end
end
% H51 - Derivative of Reactive Power Flows with Angles..
H51 = zeros(nqf,nbus-1);
for i = 1:nqf
m = fbus(qf(i));
n = tbus(qf(i));
for k = 1:(nbus-1)
if k+1 == m
H51(i,k) = -V(m)* V(n)*(-G(m,n)*cos(del(m)-del(n)) - B(m,n)*sin(del(m)-del(n)));
else if k+1 == n
H51(i,k) = V(m)* V(n)*(-G(m,n)*cos(del(m)-del(n)) - B(m,n)*sin(del(m)-del(n)));
else
H51(i,k) = 0;
end
end
end
end
% H52 - Derivative of Reactive Power Flows with V..
H52 = zeros(nqf,nbus);
for i = 1:nqf
m = fbus(qf(i));
n = tbus(qf(i));
for k = 1:nbus
if k == m
H52(i,k) = -V(n)*(-G(m,n)*sin(del(m)-del(n)) + B(m,n)*cos(del(m)-del(n))) - 2*V(m)*(-B(m,n)+ bpq(m,n));
else if k == n
H52(i,k) = -V(m)*(-G(m,n)*sin(del(m)-del(n)) + B(m,n)*cos(del(m)-del(n)));
else
H52(i,k) = 0;
end
end
end
end
% Measurement Jacobian, H..
H = [H11 H12; H21 H22; H31 H32; H41 H42; H51 H52];
% Gain Matrix, Gm..
Gm = H'*inv(Ri)*H;
%Objective Function..
J = sum(inv(Ri)*r.^2);
% State Vector..
dE = inv(Gm)*(H'*inv(Ri)*r);
E = E + dE;
del(2:end) = E(1:nbus-1);
V = E(nbus:end);
iter = iter + 1;
tol = max(abs(dE));
endCvE = diag(inv(H'*inv(Ri)*H)); % Covariance matrix..
Del = 180/pi*del;
E2 = [V Del]; % Bus Voltages and angles..
disp('-------- State Estimation ------------------');
disp('--------------------------');
disp('| Bus | V | Angle | ');
disp('| No | pu | Degree | ');
disp('--------------------------');
for m = 1:num
fprintf('%4g', m); fprintf(' %8.4f', V(m)); fprintf(' %8.4f', Del(m)); fprintf('\n');
end
disp('---------------------------------------------');
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]A. S. Alayande, N. Nwulu and A. E. Bakare, "Modelling and Countermeasures of False Data Injection Attacks Against State Estimation in Power Systems," 2018 International Conference on Computational Techniques, Electronics and Mechanical Systems (CTEMS), Belgaum, India, 2018, pp. 129-134, doi: 10.1109/CTEMS.2018.8769295.
🌈4 Matlab代码实现
相关文章:
【状态估计】电力系统状态估计的虚假数据注入攻击建模与对策(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

【Spring】Spring @Import注解的使用和源码分析
文章目录 介绍Import导入bean的三种方式普通类ImportSelector接口ImportBeanDefinitionRegistrar接口 源码解析总结 介绍 今天主要介绍Spring Import注解,在Spring中Import使用得比较频繁,它得作用是导入bean,具体的导入方式有多种ÿ…...
C++中的类与对象
类与对象 我们在C语言中自定义的struct 叫做结构体,而在C中我们把struct升级为了类,并且还加入了一个class,也称为类,那么我们今天就来看一下结构体和类的不同和相同 1.结构体与类 我们在C语言中的结构体是struct,而…...

探索Qt图像处理的奥秘:从入门到精通
探索Qt图像处理的奥秘:从入门到精通(Exploring the Secrets of Qt Image Processing: From Beginner to Expert) 引言:Qt图像处理的概述和应用(Introduction: Overview and Applications of Qt Image Processing&#…...
springboot+vue企业人事人力资源管理系统java公司员工出差考勤办公OA系统
“简易云”是这个系统的名字 (6)系统管理:主要下拉分为角色管理、菜单管理; 角色管理:此页面可对角色进行增删改查操作,可修改不同角色的权限; 菜单管理:此页面可配置系统可展示的菜…...

设计模式-模板模式在Java中的使用示例
场景 模板模式 模板模式又叫模板方法模式(Template Method Pattern),是指定义一个算法的骨架,并允许子类为一个 或者多个步骤提供实现。 模板模式使得子类可以在不改变算法结构的情况下,重新定义算法的某些步骤,属于行为型设计模式。 模…...

回溯算法及其应用
回溯是一种常见的算法思想,用于解决许多优化问题。该算法的核心思想是穷举所有可能的解决方案,然后通过剪枝来减少不必要的计算,以获得最优解。 回溯算法常用于求解组合、排列、子集和等问题。通常情况下,回溯算法需要递归地搜索…...

如何一步步打造完美的成绩查询系统平台?
想要搭建一个高效的在线发布成绩查询系统平台,首先需要了解哪些技术和工具是必备的。本文将为您介绍一些主流的技术和工具,帮助您快速搭建一个稳定、安全、易用的成绩查询系统。 想要制作在线成绩查询系统平台有两种方式,第一种是直接使用易…...

P1026 [NOIP2001 提高组] 统计单词个数
题目描述 给出一个长度不超过 200200 的由小写英文字母组成的字母串(该字串以每行 2020 个字母的方式输入,且保证每行一定为 2020 个)。要求将此字母串分成 �k 份,且每份中包含的单词个数加起来总数最大。 每份中包含…...

CTFHub | eval执行
0x00 前言 CTFHub 专注网络安全、信息安全、白帽子技术的在线学习,实训平台。提供优质的赛事及学习服务,拥有完善的题目环境及配套 writeup ,降低 CTF 学习入门门槛,快速帮助选手成长,跟随主流比赛潮流。 0x01 题目描述…...
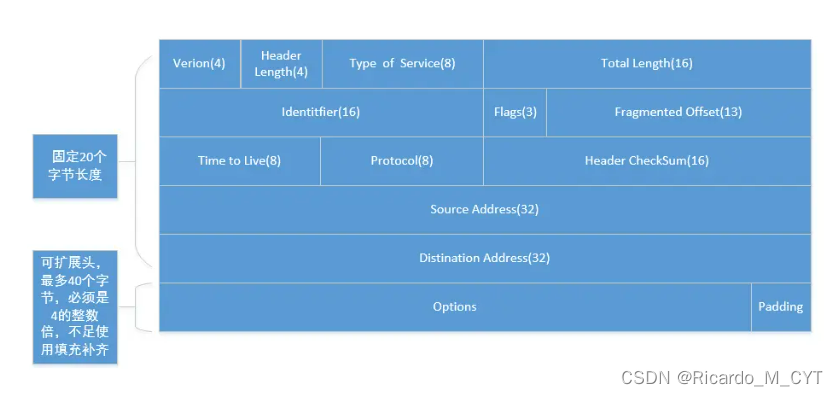
IP协议头
IP 4位版本号(version)4位头部长度(header length)8位服务类型(Type Of Service)16位总长度(total length)16位标识(id)3位标志字段13位分片偏移(…...

【xxl-job定时任务框架详解】
一,分布式任务调度 基本概念 分布式任务调度是一种用于在分布式环境中调度和执行任务的技术。在分布式系统中,由于存在多台服务器、多个进程和线程并行执行,因此需要一种机制来协调和管理任务的执行,避免任务冲突、重复执行、负载不均衡等问题。分布式任务调度通常由一个…...

7、在vscode上利用cmake构建多文件C++工程
文章目录 (1)创建如下工程文件夹:其中头文件放在include文件夹中,源文件放在src文件夹中(2)在vscode上打开工程文件夹,在对应的文件夹内建立相应的文件1)目录结构2)各文件…...

Linux操作系统网络模块
Linux操作系统的网络模块是负责网络通信的核心部分。它通过实现各种协议和算法,使得计算机能够在网络中进行数据交换和通信。网络模块主要包括以下几个方面的功能: (1)IP协议栈:负责处理网络层的数据包,实…...
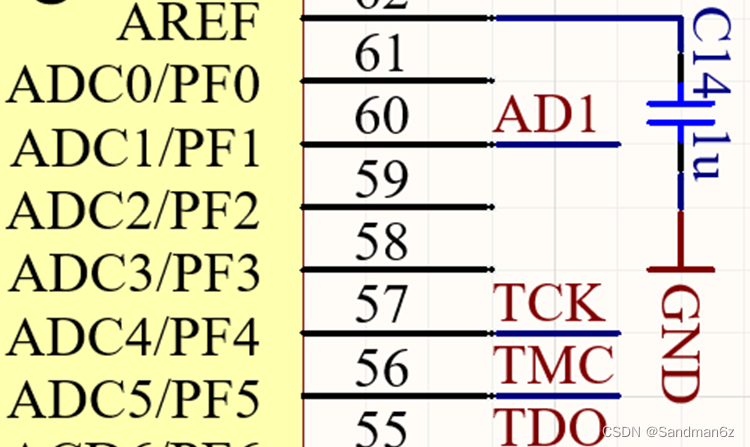
不同批次板子采集到的传感器压力值不同
问题描述: M340B空压机主控板在接正常压力气源时,显示屏显示压力值过高并报警。 问题排查: 确认可能的故障点:压力传感器、硬件电路(供电电路、分压电路、ADC采样电路等)、单片机、软件; 排…...
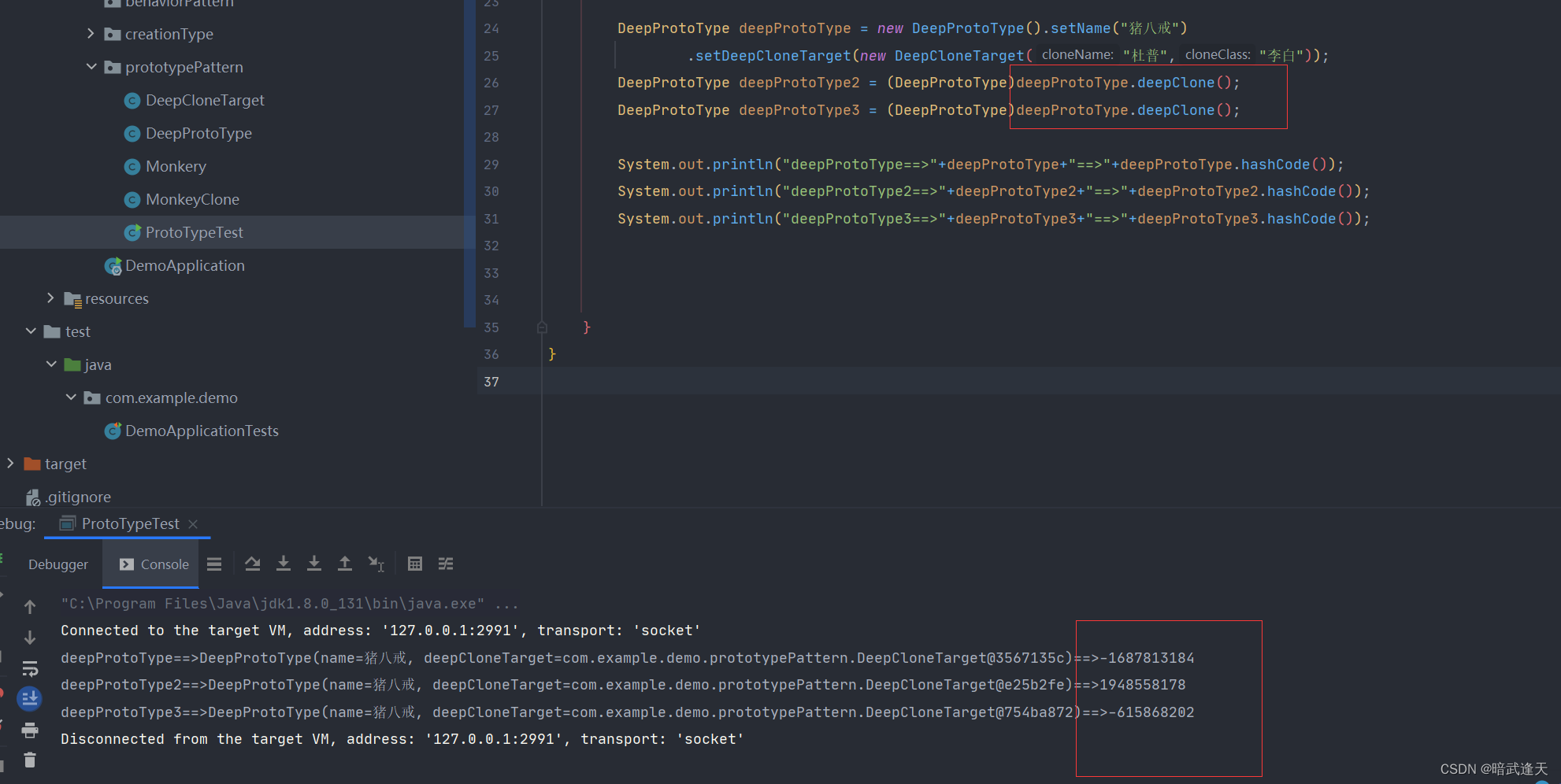
设计模式--原型模式
目录 基本介绍 传统方式克隆 原型模式改进 浅拷贝和深拷贝 浅拷贝的介绍 深拷贝的介绍 原型模式的注意事项和细节 基本介绍 (1) 原型模式(prototype模式): 用原型实例指定创建对象的种类 并且通过拷贝这些原型 创建新的对象 (2) 原型模式是一种创建型设计模式 允许一个…...
C++智能指针shared_ptr详解
智能指针shared_ptr详解 一、简介二、底层原理2.1、引用计数2.2、shared_ptr的构造和析构2.3、shared_ptr的共享和拷贝2.4、循环引用问题 三、shared_ptr的使用3.1、创建一个shared_ptr3.2、共享一个shared_ptr3.3、使用删除器3.4、解除关联 四、使用示例总结 一、简介 C智能指…...

家政服务APP小程序开发功能详解
随着人们生活水平的提高,对家政服务的要求也越来越高。而传统的到家政公司寻找服务人员的方法显然已经无法满足人们需求,取而代之的是线上预约家政服务。家政服务App小程序软件可以满足用户在线预约,还可以根据自己的需求定制家政服务、选择家…...
【C++】deque的实现原理简单介绍
前言 deque被称为双端队列,它的出现主要是为了结合vector和list的优点并减小它们的缺点,实际上deque确实结合了vector和list的优点减小了它们的缺点,但是它的结合也让它自己的优点没有原始的vector和list那么极致,导致deque变得很…...

UWB隧道人员定位技术应用,施工作业安全精准保障
隧道施工的安全不仅关系到工程项目的质量和施工效率,也关系到我国的资金安全、施工人员和人民的生命财产安全。如何有效加强隧道施工的安全管理能力,成为隧道施工企业管理者最关心的问题。国家铁道局在《关于加强铁路隧道工程安全工作的若干意见》中指出…...

3大突破性功能:如何用QtScrcpy彻底改变你的Android投屏体验
3大突破性功能:如何用QtScrcpy彻底改变你的Android投屏体验 【免费下载链接】QtScrcpy Android real-time display control software 项目地址: https://gitcode.com/GitHub_Trending/qt/QtScrcpy 你是否曾经为了在电脑上操作手机而烦恼?无论是游…...

Aurora框架解析:一体化高性能云原生开发平台的设计与实践
1. 项目概述与核心价值如果你在开源社区里混迹过一段时间,尤其是对现代化、高性能的Web开发框架感兴趣,那么“Aurora”这个名字你大概率不会陌生。它不是一个简单的库或者工具,而是一个由社区驱动的、旨在构建下一代企业级应用开发平台的雄心…...

告别手动框选!用SUSTechPOINTS的V键批量标注,5分钟搞定一帧点云
解锁SUSTechPOINTS的V键批量标注:点云处理效率革命 在自动驾驶与机器人研发领域,点云标注是构建高精度感知模型的基础环节,但传统逐帧手动标注方式往往成为项目进度的瓶颈。我曾参与过一个城市级点云数据集标注项目,团队最初采用常…...

移动端AI助手开发实战:混合架构、模型部署与性能优化
1. 项目概述:一个移动端AI助手的诞生 最近在移动端AI应用开发圈子里,一个名为 copaw-mobile 的项目开始引起不少同行的注意。这个由 xmingai 团队开源的项目,定位非常清晰——它要做的,就是将一个功能强大的AI助手,…...

Python自动化股票分析工具:从数据采集到可视化报告全流程实战
1. 项目概述:一个面向个人投资者的自动化股票分析工具如果你和我一样,是个对A股市场有点兴趣,但又没时间天天盯盘的上班族,那你肯定也经历过这种纠结:早上开盘前想看看心仪的几只股票有没有什么异动,结果一…...

AI量化交易实战:从机器学习模型到加密货币对冲基金系统构建
1. 项目概述:一个面向加密货币的AI对冲基金框架最近几年,AI在量化交易领域的应用已经从实验室走向了实战,尤其是在波动性极高的加密货币市场。如果你对量化交易和机器学习感兴趣,并且想找一个能直接上手、结构清晰的实战项目来学习…...

基于Node.js的Markdown文档自动化转换工具:从原理到CI/CD集成实战
1. 项目概述:一个被低估的文档转换利器如果你和我一样,日常工作中需要处理大量不同格式的文档,比如把Markdown写的技术文档转成Word给产品经理看,或者把项目README转成PDF存档,那你肯定也经历过格式错乱、样式丢失的烦…...

ESP32边缘AI部署实战:从模型量化到嵌入式推理全流程解析
1. 项目概述:当ESP32遇见AI,边缘智能的微型革命最近在捣鼓一个挺有意思的开源项目,叫wangzongming/esp-ai。光看名字,你可能觉得这又是一个把AI模型塞进微控制器的尝试,但实际深入后,我发现它的野心和实现方…...

Cortex-A78C架构解析:AMU与ETM寄存器实战指南
1. Cortex-A78C核心架构与寄存器概览Cortex-A78C是Armv8-A架构的高性能实现,面向移动计算和边缘AI场景优化。作为A78系列的安全增强版本,它在保留原有3发射乱序执行流水线的基础上,新增了Pointer Authentication等安全扩展,同时强…...

VTube Studio API完全指南:5个核心场景教你打造个性化虚拟主播互动
VTube Studio API完全指南:5个核心场景教你打造个性化虚拟主播互动 【免费下载链接】VTubeStudio VTube Studio API Development Page 项目地址: https://gitcode.com/gh_mirrors/vt/VTubeStudio 想要为你的虚拟主播形象添加更多互动功能,却不知道…...