【Paper Note】ViViT: A Video Vision Transformer
ViViT: A Video Vision Transformer
- Abstract
- Overview of vision transformer 回顾ViT
- Embedding video clips 视频编码方式
- Uniform frame sampling 均匀采样
- Tubelet embedding 时空管采样
- 初始化
- 3D卷积代码介绍
- 视频编码输入到模型当中
- Transformer Models for Video
- Spatio-temporal attention 空间-时间注意力
- Factorised encoder
- Factorised self-attention
- Factorised dot-product attention
- 消融实验
Abstract
文章主要transformer在包含时序信息维度的视频格式上的问题展开:
- 视频格式数据生成的token序列数量过多,带来繁重的计算冗余。
- 训练Transfomer结构模型需要引入大规模的数据集,训练对数据条件十分苛刻。
为了高效处理视频数据中生成的大规模时空tokens
①文章提出并探讨了几种对空间和时间维度进行分解的方法,进而提出了相应的网络结构,从而增加模型对视频数据特征提取的效率和可扩展性。
②其次,规范了模型的训练(主要针对模型的训练策略)。目的在小数据集上也能使得Transformer类模型能有很好的效果
Overview of vision transformer 回顾ViT
基础的ViT模型主要有三个模块组成
- Linear Project of Flattened Patches即为Embedding层,对输入的三通道图像数据利用conv卷积层进行分块并完成对应的线性映射,如上式当中的E,而后通过torch.view()进行展平压缩维度。拼接上类别token后采用矩阵相加方式引入位置编码。
- Transformer Encoder模块,对Embedding层输出的token进行多头注意力计算和多层感知机(中间包含Layer Norm)。其中MSA是整个模型的核心部分。
- MLP Head层,堆叠的Transformer Block最终的输出经过Head结构提取出类别token所对应的结果信息,文中通过两个线形层叠加中间插入一个tanh激活函数来实现。
Embedding video clips 视频编码方式
一个视频V有4个维度,T * H * W * C。 变成一个序列token就是 Nt * Nh * Nw * d。加上位置编码, 变成transformer的输入 N * d。
区别于常规的二维图像数据,视频数据相当于需在三维空间内进行采样(拓展了一个时间维度)。而文章中所提出的两钟视频嵌入方法目的都是将视频数据 V ∈ R T × H × W × C \mathrm{~V~}\in\mathbb{R}^{\mathrm{T}\times\mathrm{H}\times\mathrm{W}\times\mathrm{C}} V ∈RT×H×W×C映射到token当中得到 z ~ ∈ R n t × n h × n w × d \tilde{\mathrm{z}}\in\mathbb{R}^{\mathrm{n_t}\times\mathrm{n_h}\times\mathrm{n}_{\mathrm{w}}\times\mathrm{d}} z~∈Rnt×nh×nw×d,而后添加位置编码并对token进行reshape得到最终Transformer的输入 z ∈ R N × d \mathrm{z}\in\mathbb{R}^{\mathrm{N}\times\mathrm{d}} z∈RN×d
Uniform frame sampling 均匀采样
就是先提取帧,然后每一帧按照ViT的方法提取token,然后把不同帧的token拼接起来作为输入
采用相同的采样帧率,从视频数据当中均匀采样 n t n_t nt 帧,使用相同的embedding方法独立地处理每一个帧当中的patch,而后将得到的所有token拼接concat在一起。具体而言,从每个采样获得的帧当中划分
个不重叠的图像块patch,则共产生 n w × n t n_w\times{n_t} nw×nt个不重叠的图像块patch,则共产生 n t × n w × n t n_t\times{n_w}\times{n_t} nt×nw×nt 个tokens输入Transformer当中。
然而这种切片方法对于长时间序列的数据来说生成的token长度极大,并且不同帧间首位相连的patch在位置编码上与真实情况不一致。
Tubelet embedding 时空管采样
前一种方法是提取2D图像特征,这种方法是提取立方体,假设每个tublet的shape是t, w, h,那就是说没t帧提取一次特征,取每一帧相同位置的w, hpatch组成输入
从输入volume(体积)当中提取时空上不重叠的“tubes”,这种方法是将vit嵌入到3D的拓展,embedding层就对应的选取三维卷积。则对于维度为 t × h × w t×h×w t×h×w的tube管来说, n t = [ T t ] , n h = [ H h ] , n w = [ W w ] \mathrm{n_{t}}=[\frac{T}{t}],n_{\mathrm{h}}=[\frac{H}{\mathrm{h}}],n_{\mathrm{w}}=[\frac{W}{\mathrm{w}}] nt=[tT],nh=[hH],nw=[wW]这种采样方法直接在采样的过程当中就融合了时空信息。
提取不重叠,空间-时间的tubes(立方体)。这个tublelt的维度就是: t * h * w。token就包含了时间、宽、高。
所有的模型都是32帧输入的。
看了下vivit_base_k400的config, 模型名:ViViT- B/16*2。其实16 * 16还是ViT一样的方法。
config.dataset_configs.num_frames = 32 # 采取32帧config.dataset_configs.stride = 2 #2帧为1个config.dataset_configs.crop_size = 224 # 大小224config.model.temporal_encoding_config.method = '3d_conv'
config.model.patches.size = [16, 16, 2] # H,W是 16* 16的
初始化
模型是以Vit为基础进行训练的,所以初始化需要进行特殊处理
Position emb: 复制t份出来,来适应多帧的处理
Embedding emb:
2d的输入没什么好说的
对于3d的输入,提供了两种不同的方式

下面的公式可以实现在初始的情况下,等价于只用的1帧的情况,参数由模型自己去学习

3D卷积代码介绍
首先2D的卷机是一个平面的卷机(H * W), 就是一个H * W的平面 和一个 H * W的卷机核,对应点相乘,输出一个值。
那么3D的卷机就是一个立方体(H * W * D), 就是一个立方体和一个立方体的卷机核相乘,输出一个值。
用pytorch的官方的Conv3D来看, 这个卷机核就是一个3D的立方体 3 * 5 * 2
输入是 (Batch, Channel, Depth, Height, Width) -> (20, 16, 10, 50, 100)
m = nn.Conv3d(16, 33, (3, 5, 2), stride=(2, 1, 1), padding=(4, 2, 0))
input = torch.randn(20, 16, 10, 50, 100)
output = m(input)
output.shape # torch.Size([20, 33, 8, 50, 99]
更改为paper中的输入:
输入是一个batch:16, 3 * 224 * 224的图片, 一共有32帧,
使用kenel,2 * 16 * 16, 理解为2帧变1帧, 图像上 16 * 16的不重叠区域
m = nn.Conv3d(3, 1, (2, 16, 16), stride=(2, 16, 16))
input = torch.randn(16, 3, 32, 224, 224)
output = m(input)
output.shape # torch.Size([16, 1, 16, 14, 14])
视频编码输入到模型当中
输入视频,均匀采样, 知道采样的帧数(n_sampled_frames), 去算间隔, 采样,输出。
def sample_frames_uniformly(x: jnp.ndarray,n_sampled_frames: int) -> jnp.ndarray:"""Sample frames from the input video."""if x.ndim != 5:raise ValueError('Input shape should be [bs, t, h, w, c].')num_frames = x.shape[1]if n_sampled_frames < num_frames:t_start_idx = num_frames / (n_sampled_frames + 1)t_step = t_start_idxelse:t_start_idx = 0t_step = 1t_end_idx = num_framestemporal_indices = jnp.arange(t_start_idx, t_end_idx, t_step)temporal_indices = jnp.round(temporal_indices).astype(jnp.int32)temporal_indices = jnp.minimum(temporal_indices, num_frames - 1)return x[:, temporal_indices] # [n, t_s, in_h, in_w, c]
编码后,从batch, time,h, w, c -> batch, thw, c
def temporal_encode(x,temporal_encoding_config,patches,hidden_size,return_1d=True,name='embedding'):"""Encode video for feeding into ViT."""n, _, in_h, in_w, c = x.shapeif temporal_encoding_config.method == 'temporal_sampling':n_sampled_frames = temporal_encoding_config.n_sampled_framesx = video_utils.sample_frames_uniformly(x, n_sampled_frames)t_s = x.shape[1]x = jnp.reshape(x, [n, t_s * in_h, in_w, c])x = embed_2d_patch(x, patches, hidden_size)temporal_dims = t_sif return_1d:n, th, w, c = x.shapex = jnp.reshape(x, [n, th * w, c])else:n, th, w, c = x.shapex = jnp.reshape(x, [n, t_s, -1, w, c])elif temporal_encoding_config.method == '3d_conv':kernel_init_method = temporal_encoding_config.get('kernel_init_method',None)x = embed_3d_patch(x, patches, hidden_size, kernel_init_method, name)temporal_dims = x.shape[1]if return_1d:n, t, h, w, c = x.shapex = jnp.reshape(x, [n, t * h * w, c])else:raise AssertionError('Unknown temporal encoding method.')assert x.size > 0, ('Found zero tokens after temporal encoding. ''Perhaps one of the patch sizes is such that ''floor(dim_size / patch_size) = 0?')return x, temporal_dims
Transformer Models for Video
Spatio-temporal attention 空间-时间注意力
伴随着采样的输入帧数增加,token的数量也会线性增加。运算量会平方倍的增加,所以需要更加有效的结构。
这种模型简单地将所有的tokens(包括时空)简单地通过Transformer encoder层,导致问题就是引入指数增长的计算量,每个Transformer层对所有时空token均进行成对交互,这种方式极其低效,具体模型构成方式与另一篇文章:Video Transformer Net 所提出的结构类似,如图4所示

Factorised encoder
使用两个 transformer
- 第一个是 spatial transformer,输入是某一帧的多个token,输出一个token
- 第二个是temporal transformer,输入是前一步多帧的token(每帧对应一个token),输出结果就通过mlp进行分类
模型是2个单独的transformer encoder组成的:
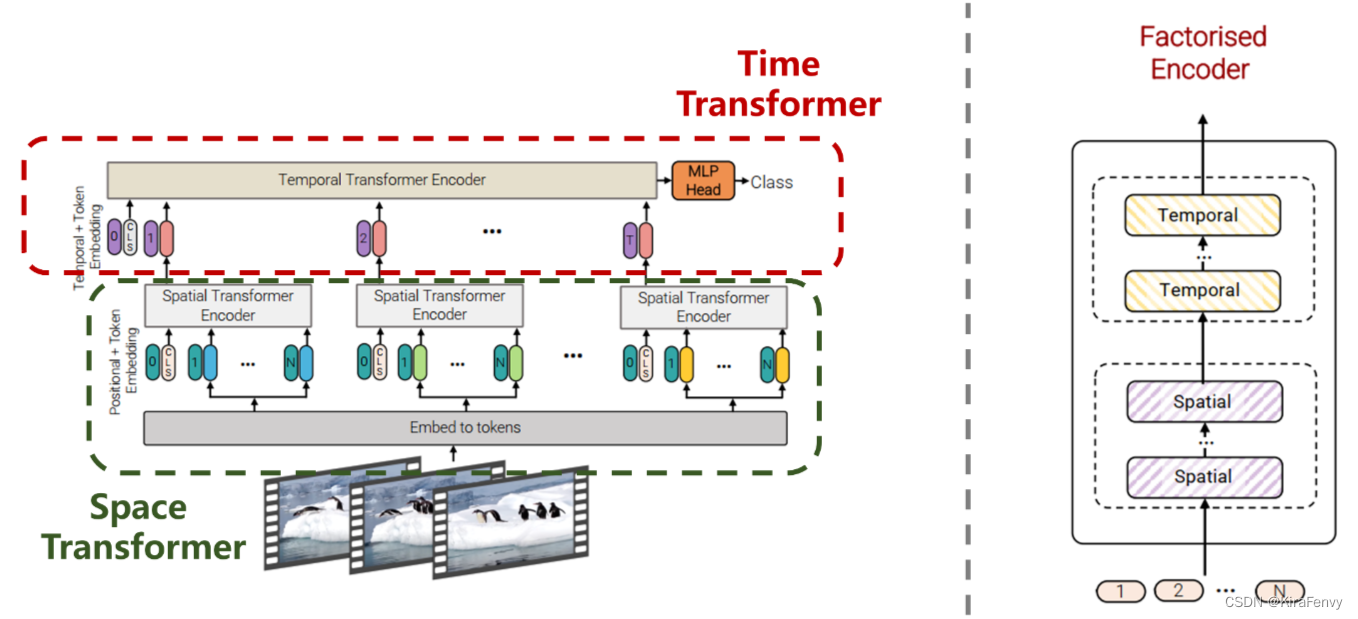
- 空间编码器,通过对同一时间索引的token建模。输出cls_token。
- 这个帧维度的表征,连接在一起,输入时间编码器中。这个输出就是最后的结果。
Factorised encoder方法:构建两个单独的transformer encoder,分别针对空间和时间处理。首先利用空间编码器(Space Transformer),通过对同一时间索引的token建模。输出cls_token。而后将**输出的类别token和帧维度的表征token拼接输入到时间编码器(Time Transformer)**中得到最终的结果,模型结构如图5所示(相当于两个Transformer模型的叠加),实现代码如下:
class ViViT(nn.Module):def __init__(self, image_size, patch_size, num_classes, num_frames, dim = 192, depth = 4, heads = 3, pool = 'cls', in_channels = 3, dim_head = 64, dropout = 0.,emb_dropout = 0., scale_dim = 4, ):super().__init__()assert pool in {'cls', 'mean'}, 'pool type must be either cls (cls token) or mean (mean pooling)assert image_size % patch_size == 0, 'Image dimensions must be divisible by the patch size.'num_patches = (image_size // patch_size) ** 2patch_dim = in_channels * patch_size ** 2self.to_patch_embedding = nn.Sequential(Rearrange('b t c (h p1) (w p2) -> b t (h w) (p1 p2 c)', p1 = patch_size, p2 = patch_size),nn.Linear(patch_dim, dim),)self.pos_embedding = nn.Parameter(torch.randn(1, num_frames, num_patches + 1, dim))self.space_token = nn.Parameter(torch.randn(1, 1, dim))self.space_transformer = Transformer(dim, depth, heads, dim_head, dim*scale_dim, dropout)self.temporal_token = nn.Parameter(torch.randn(1, 1, dim))self.temporal_transformer = Transformer(dim, depth, heads, dim_head, dim*scale_dim, dropout)self.dropout = nn.Dropout(emb_dropout)self.pool = poolself.mlp_head = nn.Sequential(nn.LayerNorm(dim),nn.Linear(dim, num_classes))def forward(self, x):x = self.to_patch_embedding(x)b, t, n, _ = x.shapecls_space_tokens = repeat(self.space_token, '() n d -> b t n d', b = b, t=t)x = torch.cat((cls_space_tokens, x), dim=2)x += self.pos_embedding[:, :, :(n + 1)]x = self.dropout(x)x = rearrange(x, 'b t n d -> (b t) n d')x = self.space_transformer(x)x = rearrange(x[:, 0], '(b t) ... -> b t ...', b=b)cls_temporal_tokens = repeat(self.temporal_token, '() n d -> b n d', b=b)x = torch.cat((cls_temporal_tokens, x), dim=1)x = self.temporal_transformer(x)x = x.mean(dim = 1) if self.pool == 'mean' else x[:, 0]return self.mlp_head(x)Factorised self-attention
通过 self-attention 层将时空数据分开处理
- 空间层只在同一帧内不同token间进行attention操作
- 时间层对不同帧同一位置的token进行attention操作
- 先计算空间自注意力(token中有相同的时间索引),再计算时间的自注意力(token中有相同的空间索引),其实先后顺序无所谓,只要串行就行
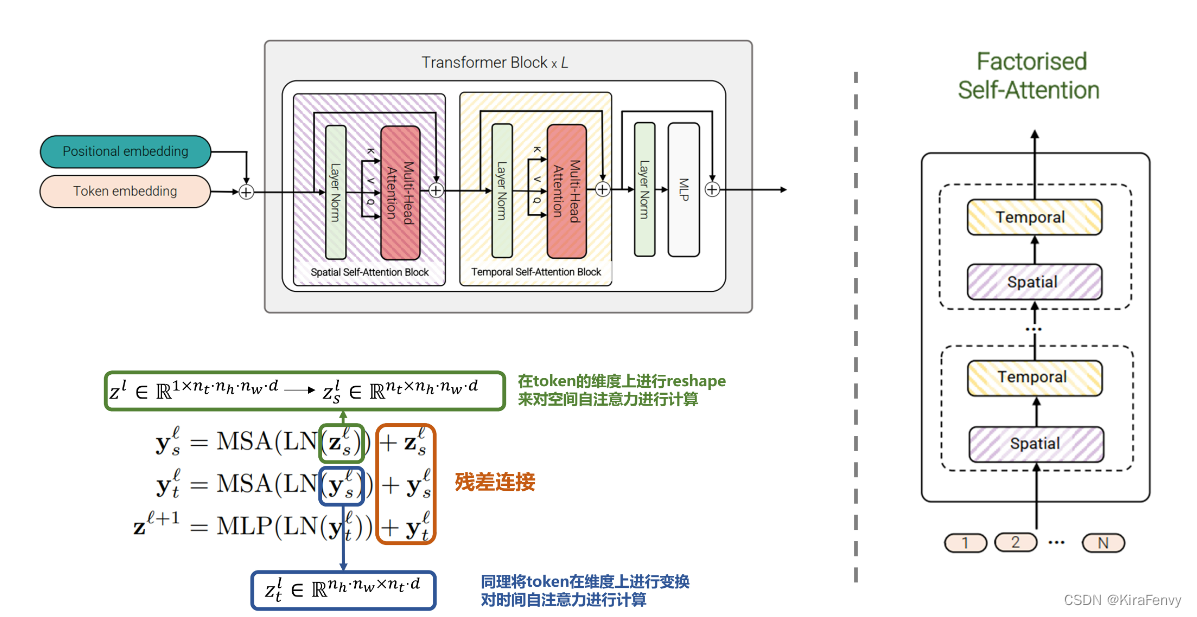
相较于Model 1,这个模型包含相同数量的Transformer层。而此模型思路不是在第 l l l 层计算所有成对的token z l z ^l zl 的多头自注意力,而是将自注意力计算在空间和时间上分解,首先只计算空间上的自注意力(对于相同时间索引的token),而后再进行时间上的计算(对于相同的空间索引)。在降低计算复杂度的同时在每个Transformer层均完成了时空层面的自注意力交互。其结构如图6所示。
自注意力计算:
先时间后空间,或者先空间后时间没有区别

def _reshape_to_time_space(x, temporal_dims):if x.ndim == 3:b, thw, d = x.shapeassert thw % temporal_dims == 0hw = thw // temporal_dimsx = jnp.reshape(x, [b, temporal_dims, hw, d])assert x.ndim == 4return x、
reshape_to_2d_factorized, 就是将batch, h * w, channel -> batch, w, h, channel
def reshape_to_2d_factorized(x: jnp.ndarray, axis: int,two_d_shape: Tuple[int, int, int, int]):"""Converts 1d inputs back to 2d after axial attention."""assert x.ndim == 3, ('The input dimention should be ''[batch_size, height*width, channel]')batch_size, height, width, channel = two_d_shapeif axis == 1:assert x.shape[0] == batch_size * widthreturn x.reshape((batch_size, width, height, channel)).transpose((0, 2, 1, 3))elif axis == 2:assert x.shape[0] == batch_size * heightreturn x.reshape(two_d_shapedef reshape_to_2d_factorized(x: jnp.ndarray, axis: int,two_d_shape: Tuple[int, int, int, int]):"""Converts 1d inputs back to 2d after axial attention."""assert x.ndim == 3, ('The input dimention should be ''[batch_size, height*width, channel]')batch_size, height, width, channel = two_d_shapeif axis == 1:assert x.shape[0] == batch_size * widthreturn x.reshape((batch_size, width, height, channel)).transpose((0, 2, 1, 3))elif axis == 2:assert x.shape[0] == batch_size * heightreturn x.reshape(two_d_shape)
在不同的维度上做注意力,来实现时间和空间。
其实也是一样的,LN + atttion + 残差连
def _run_attention_on_axis(inputs, axis, two_d_shape):"""Reshapes the input and run attention on the given axis."""inputs = model_utils.reshape_to_1d_factorized(inputs, axis=axis)x = nn.LayerNorm(dtype=self.dtype, name='LayerNorm_{}'.format(_AXIS_TO_NAME[axis]))(inputs)x = self_attention(name='MultiHeadDotProductAttention_{}'.format(_AXIS_TO_NAME[axis]))(x, deterministic=deterministic)x = nn.Dropout(rate=self.dropout_rate)(x, deterministic)x = x + inputsreturn model_utils.reshape_to_2d_factorized(x, axis=axis, two_d_shape=two_d_shape)
整个这个因式分解的注意力模块,就是在不同的轴上,做自注意力。
可以使用先时间后空间,attention_axes = (1, 2)。或者先空间后时间,attention_axes= (2, 1)。
所以整个就是: 时间attn + 空间attn + LN + MLP
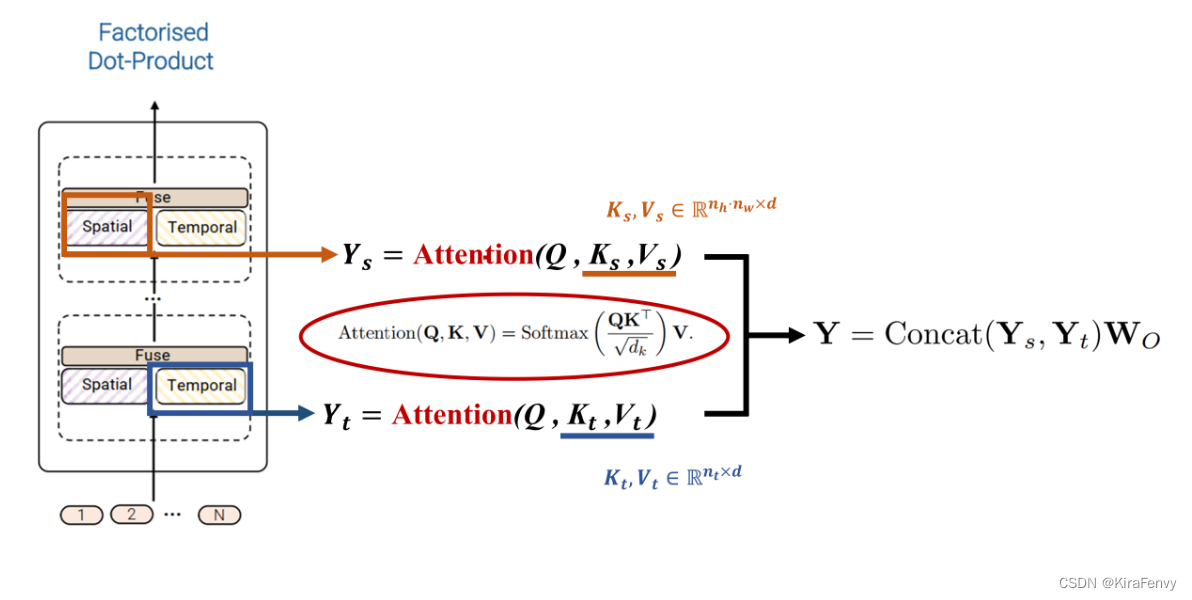
Factorised dot-product attention
时间、空间heads是并行的,而不是串行的。
spatial还是同一帧内不同token,temporal是不同帧同一位置的token
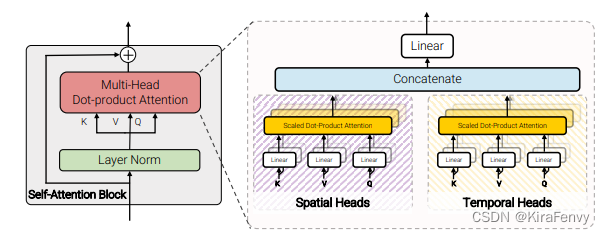
第四种模型的思想则是通过利用dot-product点积注意力操作来取代上述的因式分解factorisation操作,通过注意力计算的方式来代替简单的张量reshape。思想是对于空间注意力和时间注意力分别构建对应的键、值。具体思路如图所示。
class FDATransformerEncoder(nn.Module):"""Factorized Dot-product Attention Transformer Encoder"""def __init__(self, dim, depth, heads, dim_head, mlp_dim, nt, nh, nw, dropout=0.):super().__init__()self.layers = nn.ModuleList([])self.nt = ntself.nh = nhself.nw = nwfor _ in range(depth):self.layers.append(PreNorm(dim, FDAttention(dim, nt, nh, nw, heads=heads, dim_head=dim_head, dropout=dropout)))def forward(self, x):for attn in self.layers:x = attn(x) + xreturn xclass FDAttention(nn.Module):"""Factorized Dot-product Attention"""def __init__(self, dim, nt, nh, nw, heads=8, dim_head=64, dropout=0.):super().__init__()inner_dim = dim_head * headsproject_out = not (heads == 1 and dim_head == dim)self.nt = ntself.nh = nhself.nw = nwself.heads = headsself.scale = dim_head ** -0.5self.attend = nn.Softmax(dim=-1)self.to_qkv = nn.Linear(dim, inner_dim * 3, bias=False)self.to_out = nn.Sequential(nn.Linear(inner_dim, dim),nn.Dropout(dropout)) if project_out else nn.Identity()def forward(self, x):b, n, d, h = *x.shape, self.headsqkv = self.to_qkv(x).chunk(3, dim=-1)q, k, v = map(lambda t: rearrange(t, 'b n (h d) -> b h n d', h=h), qkv)qs, qt = q.chunk(2, dim=1)ks, kt = k.chunk(2, dim=1)vs, vt = v.chunk(2, dim=1)# Attention over spatial dimensionqs = qs.view(b, h // 2, self.nt, self.nh * self.nw, -1)ks, vs = ks.view(b, h // 2, self.nt, self.nh * self.nw, -1), vs.view(b, h // 2, self.nt, self.nh * self.nw, -1)spatial_dots = einsum('b h t i d, b h t j d -> b h t i j', qs, ks) * self.scalesp_attn = self.attend(spatial_dots)spatial_out = einsum('b h t i j, b h t j d -> b h t i d', sp_attn, vs)# Attention over temporal dimensionqt = qt.view(b, h // 2, self.nh * self.nw, self.nt, -1)kt, vt = kt.view(b, h // 2, self.nh * self.nw, self.nt, -1), vt.view(b, h // 2, self.nh * self.nw, self.nt, -1)temporal_dots = einsum('b h s i d, b h s j d -> b h s i j', qt, kt) * self.scaletemporal_attn = self.attend(temporal_dots)temporal_out = einsum('b h s i j, b h s j d -> b h s i d', temporal_attn, vt)消融实验
比较不同的token获取方式
比较了不同变种的transformer
比较了多种数据增强方式
比较了不同输入数据尺寸
比较了几类变种
比较了不同的输入帧数
相关文章:
【Paper Note】ViViT: A Video Vision Transformer
ViViT: A Video Vision Transformer AbstractOverview of vision transformer 回顾ViTEmbedding video clips 视频编码方式Uniform frame sampling 均匀采样Tubelet embedding 时空管采样初始化3D卷积代码介绍视频编码输入到模型当中 Transformer Models for VideoSpatio-tempo…...
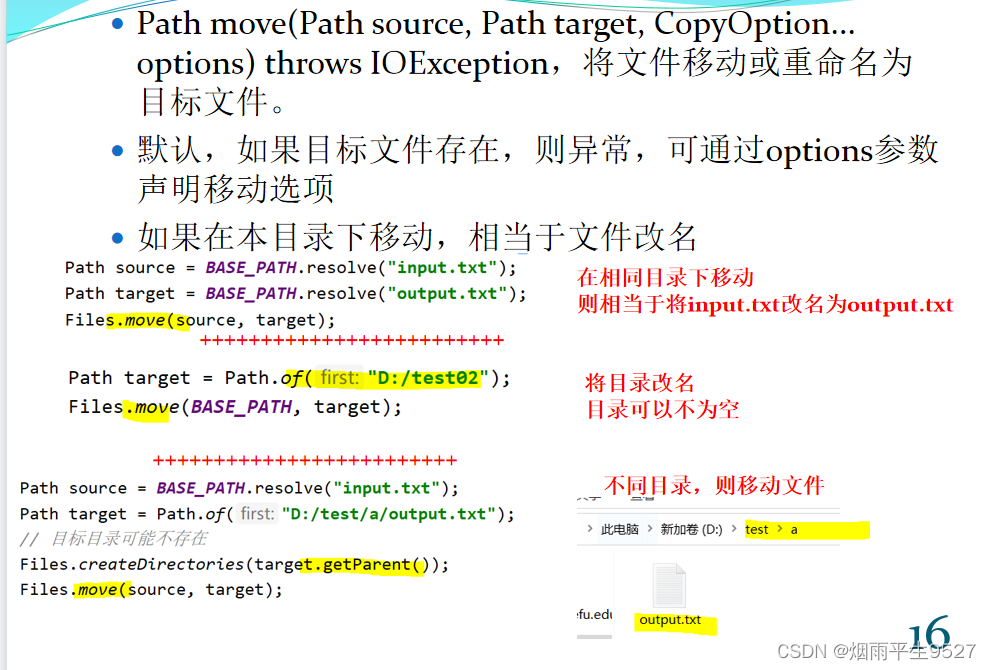
Java入坑之IO操作
目录 一、IO流的概念 二、字节流 2.1InputStream的方法 2.2Outputstream的方法 2.3资源对象的关闭: 2.4transferTo()方法 2.5readAllBytes() 方法 2.6BufferedReader 和 InputStreamReader 2.7BufferedWriter 和 OutputStreamWriter 三、路径:…...
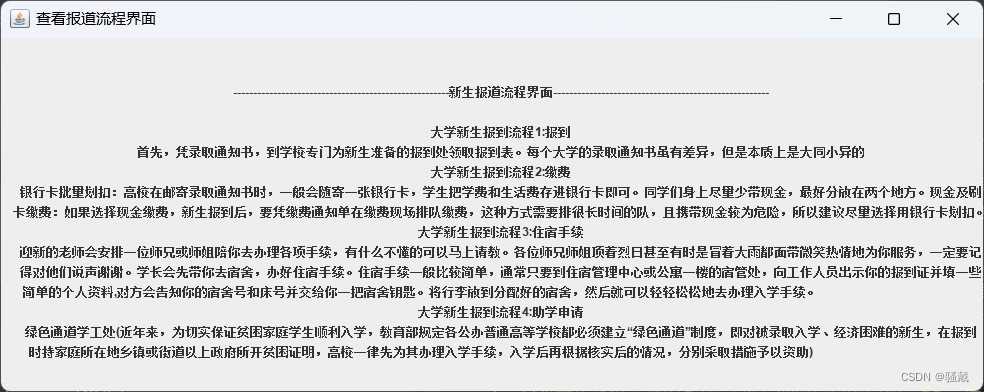
校园小助手【GUI/Swing+MySQL】(Java课设)
系统类型 Swing窗口类型Mysql数据库存储数据 使用范围 适合作为Java课设!!! 部署环境 jdk1.8Mysql8.0Idea或eclipsejdbc 运行效果 本系统源码地址: 更多系统资源库地址:骚戴的博客_CSDN_更多系统资源 更多系统…...

String的不可变特性
1 问题 如何理解“String是不可变的,但是可以变”? 2 方法 (1)String的不可变特性体现在内容和长度 首先在idea中点开查看String这个类是如何定义的 可以看到这样一行代码:private final char value[]; 正是因为这个数…...
转换MMxx(MMDeploy支持库均可)pth权重到onnx,并使用python SDK进行部署验证)
使用MMDeploy(预编译包)转换MMxx(MMDeploy支持库均可)pth权重到onnx,并使用python SDK进行部署验证
MMDeploy使用python部署实践记录 准备工作空间所需环境配置使用MMDeploy得到onnx使用MMDeploy加载onnx模型对单张图片进行推理使用python SDK对onnx模型进行验证 注意 mmdeploy C SDK的使用部署和实际操作过程请看本人另外一篇博文使用MMDeploy(预编译包)…...
Shiro安全框架简介
一、权限管理 1.1 什么是权限管理 基本上只要涉及到用户参数的系统都要进行权限管理,使用权限管理实现了对用户访问系统的控制,不同的用户访问不同的资源。按照安全规则或者安全策略控制用户访问资源,而且只能访问被授权的资源 权限管理包括认…...
三行Python代码,让数据处理速度提高2到6倍
本文可以教你仅使用 3 行代码,大大加快数据预处理的速度。 Python 是机器学习领域内的首选编程语言,它易于使用,也有很多出色的库来帮助你更快处理数据。但当我们面临大量数据时,一些问题就会显现…… 在默认情况下,…...

空间向量模长
// 空间向量模长 #include <stdio.h> #include <stdlib.h> #include <math.h> int main(int argc, char **argv) { float x, y, z; float mochang 0.0; x y z 0.0; if (argc ! 4) { printf("usage:%s x y z\n", argv[1]); …...

活动需求中灵活使用Redis提升生产力
抽奖 一堆用户参与进来,然后随机抽取几个幸运用户给予实物/虚拟的奖品;此时,开发人员就需要写上一个抽奖的算法,来实现幸运用户的抽取;其实我们完全可以利用Redis的集合(Set),就能轻…...
)
Java知识点学习(第16天)
Innodb是如何实现事务的? innodb通过Buffer Pool,LogBuffer,Redo Log,Undo Log来实现事务,以一个update语句为例: innodb在收到一个update语句后,会先根据条件找到数据所在的页,并…...

ORA-1688: unable to extend table AUDSYS.AUD$UNIFIED
昨晚正在外滩玩,有个客户发过来一段报错,已经影响到业务了。一看就是12C以后版本才有的问题,,赶紧在手机中收到临时解决办法 报错如下 ORA-1688: unable to extend table AUDSYS.AUD$UNIFIED partition SYS_P42549 by 1024 in t…...
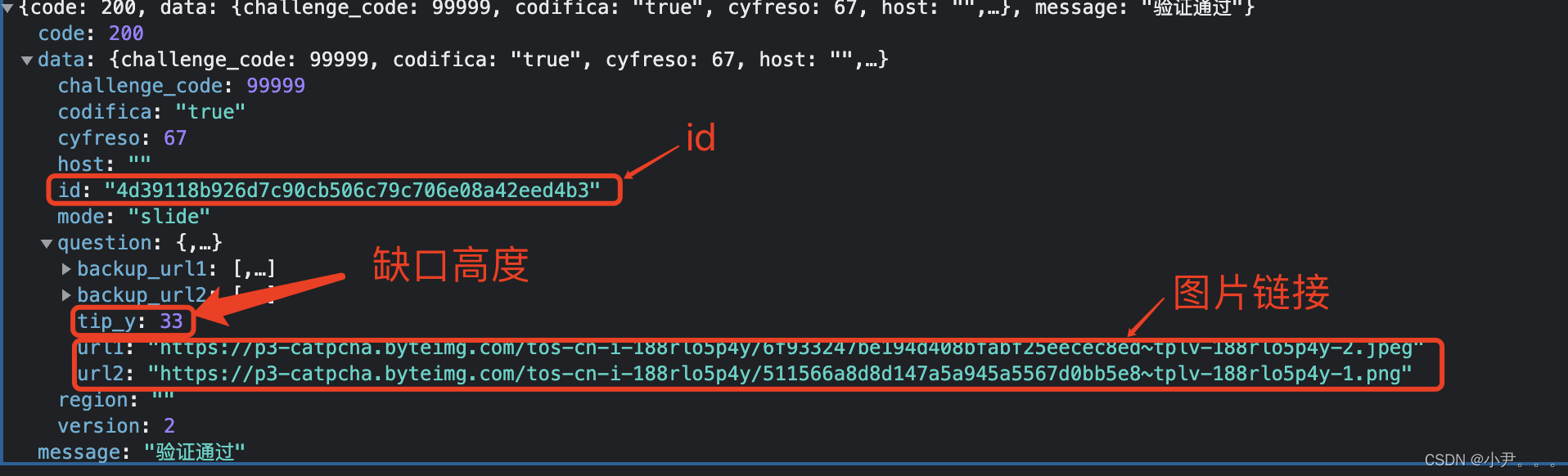
抖音滑块以及轨迹分析
声明 本文以教学为基准、本文提供的可操作性不得用于任何商业用途和违法违规场景。 本人对任何原因在使用本人中提供的代码和策略时可能对用户自己或他人造成的任何形式的损失和伤害不承担责任。 如有侵权,请联系我进行删除。 我们在web端打开用户主页的时候,时不时的会出现滑…...

C#生成单色bmp图片,转为单色bmp图片 任意语言完全用字节拼一张单色图,LCD取模 其它格式图片转为单色图
最终效果: V1.8.2 20230419 文字生成单色BMP图片4.exe 默认1280*720 如果显示不全,请把宽和高加大 字体加大。 首先,用windows画板生成一张1*1白色单色图作为标准,数据如下: 数据解析参考:BMP图像文件完…...

【瑞吉外卖】002 -- 后台登录功能开发
本文章为对 黑马程序员Java项目实战《瑞吉外卖》的学习记录 目录 一、需求分析 1、页面原型展示 2、登录页面展示 3、查看登录请求信息 4、数据模型 二、代码开发 1、创建实体类Employee,和employee表进行映射 2、创建包结构:(Controller、Se…...
【电动汽车充电站有序充电调度的分散式优化】基于蒙特卡诺和拉格朗日的电动汽车优化调度(分时电价调度)(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
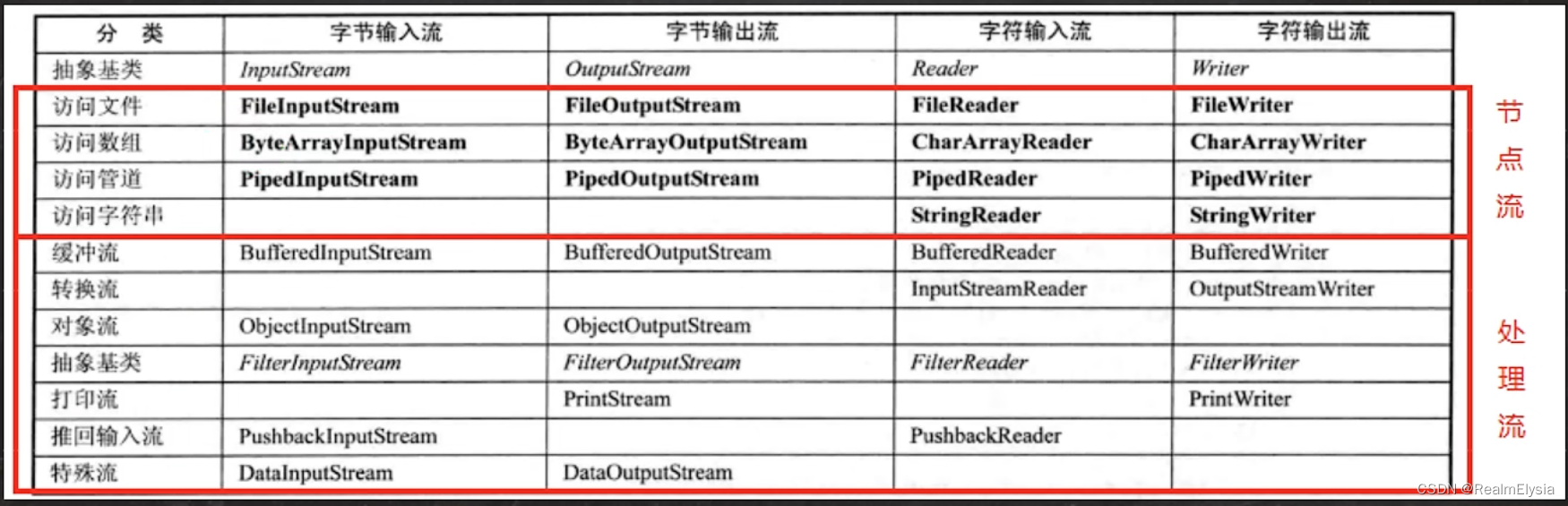
java IO流_1
目录 分类 字节流 InputStream OutputStream 文件拷贝 字符流 FileReader FileWriter 处理流 BufferedReader BufferedWriter 文本拷贝 流是从起源到接受的有序数据,通过流的方式允许程序使用相同的方式来访问不同的输入/输出源。 分类 按数据…...

【回忆 总结】我的大学四年
大学四年关键词速览 如果穿越回大一,你想对大一的你提什么最重要的建议?同样是上网课,我为何能比大多数同学学的更好?回到学校,我的大二似乎一帆风顺?在不断的迷茫和徘徊中,大三的我做出的决定&…...

深度解析OEKO
【深度解析OEKO】 什么是OEKO-TEX Standard 100? OEKO-TEX Standard 100现在是使用最为广泛的纺织品生态标志。OEKO-TEX Standard 100规定的标准是根据最新的科学知识,对纱线、纤维以及各类纺织品的有害物质含量规定限度。只有按照严格检测和检查程序提供…...
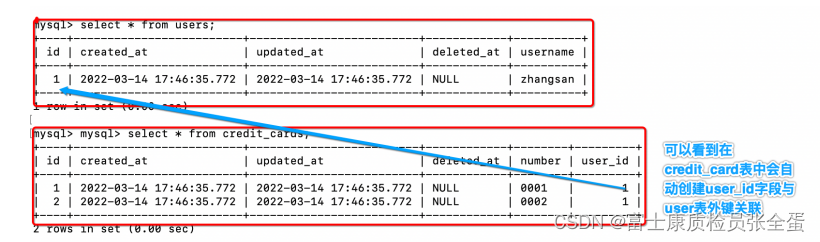
Golang gorm
GORM 指南 | GORM - The fantastic ORM library for Golang, aims to be developer friendly. 一 对多入门 比如要开发cmdb的系统,无论是硬件还是软件。硬件对应的就是对应的哪个开发在用。或者服务对应的是哪个业务模块在使用,或者应用谁在使用。那么这…...
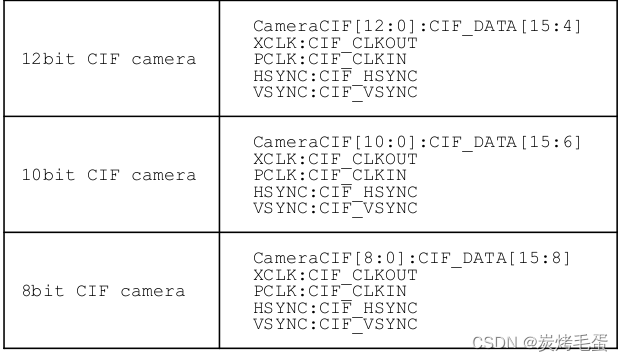
rk3568 适配摄像头 (CIF协议)
rk3568 适配摄像头 (CIF协议) 在RK3568处理器中,支持CIF协议的摄像头可以通过CSI接口连接到处理器,实现视频数据的采集和处理。同时,RK3568还支持多种图像处理算法和编解码器,可以对采集到的视频数据进行实时处理和压缩ÿ…...

桌面自动化技能库:基于PyAutoGUI与Selenium的工程化实践
1. 项目概述:一个桌面操作员的技能库最近在GitHub上看到一个挺有意思的项目,叫Marways7/cua_desktop_operator_skill。光看这个名字,可能有点摸不着头脑,但作为一个在自动化运维和桌面支持领域摸爬滚打多年的老手,我立…...

Proof Engine:简化零知识证明开发,降低区块链应用门槛
1. 项目概述:Proof Engine,一个为现代开发者设计的证明引擎如果你和我一样,在构建需要复杂逻辑验证、状态证明或零知识证明(ZKP)相关应用时,常常感到头疼——工具链复杂、学习曲线陡峭、不同框架间的兼容性…...

HTTP客户端设计哲学:从axios到hoomanity的易用性演进
1. 项目概述:一个为人类设计的HTTP客户端在构建现代应用程序时,与外部API或服务进行HTTP通信几乎是每个开发者都会遇到的日常任务。无论是调用一个天气接口、上传文件到云存储,还是与自家的微服务进行数据交换,我们都需要一个可靠…...

AI驱动Figma设计自动化:Claude插件实现自然语言到UI生成
1. 项目概述:当设计工具遇上AI助手最近在和一些资深UI/UX设计师朋友交流时,大家不约而同地提到了一个痛点:在Figma这类设计工具里,从概念到高保真原型的转化过程,依然充满了大量重复、机械的劳动。比如,我需…...
)
【独家首发】ElevenLabs马拉雅拉姆文支持状态实测报告(含ISO 639-2代码验证、音素对齐误差率<0.8%)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs马拉雅拉姆文支持的现状与战略意义 ElevenLabs 作为全球领先的语音合成平台,自2023年11月起正式将马拉雅拉姆语(Malayalam,ISO 639-1: ml)纳入…...

别再只会用LM358了!手把手教你用电压跟随器搞定嵌入式硬件中的阻抗匹配难题
嵌入式硬件实战:用电压跟随器破解阻抗匹配困局 在调试一款基于STM32的土壤湿度检测仪时,我发现传感器输出的微弱信号经过3米长的导线传输后,ADC采集到的数值总是比实际值低15%左右。更换更高精度的ADC芯片也无济于事,直到在信号源…...

UPS Ground运输时间估算:从纽约10013到全美各区域的实操指南
1. 物流时间估算的核心价值与挑战在电商和供应链的世界里,时间就是金钱,而运输时间则是连接承诺与现实的桥梁。无论是作为卖家管理客户预期,还是作为买家规划项目进度,一个相对准确的运输时间预估都至关重要。UPS Ground作为美国境…...

【百度AI】从API调用到场景落地:车牌识别技术全解析
1. 车牌识别技术入门指南 第一次接触车牌识别技术时,我也被各种专业术语搞得一头雾水。简单来说,车牌识别就像给电脑装了一双"火眼金睛",让它能自动从照片或视频中找出车牌并读出上面的文字。这项技术现在已经深入到我们生活的方方…...

OBS WebSocket插件深度解析:从源码编译到生产部署终极指南
OBS WebSocket插件深度解析:从源码编译到生产部署终极指南 【免费下载链接】obs-websocket Remote-control of OBS Studio through WebSocket 项目地址: https://gitcode.com/gh_mirrors/ob/obs-websocket OBS WebSocket是一个基于WebSocket协议的OBS Studio…...

用HSPICE玩转CMOS反相器:手把手教你分析尺寸、延迟与功耗的权衡
用HSPICE玩转CMOS反相器:手把手教你分析尺寸、延迟与功耗的权衡 在集成电路设计的浩瀚宇宙中,CMOS反相器就像是一颗不起眼却至关重要的基础星体。作为数字电路中最简单的构建模块,它的性能表现直接影响着整个系统的运行效率。对于已经掌握HS…...