【手把手做ROS2机器人系统开发二】熟悉ROS2基本命令
【手把手做ROS2机器人系统开发二】熟悉ROS2基本命令
目录
【手把手做ROS2机器人系统开发二】熟悉ROS2基本命令
一、上讲回顾
二、ROS2核心命令讲解
1、daemon-各种守护进程相关的子命令
2、node-各种节点进程相关的子命令
3、pkg-各种包进程相关的子命令
4、run运行特定软件包的可行性文件
5、topic各种话题进程相关的子命令
6、security各种安全进程相关的子命令
7、service各种服务进程相关的子命令
7、ROS2参数
8、ROS2操作Action
9、ROS2消息日志
10、ROS2自启动节点launch
11、数据记录和播放
一、上讲回顾
在上一讲开发环境搭建中,我们讲解了如何搭建Ubuntu系统环境和ROS2开发运行环境。
1.Ubuntu系统安装
2.ROS2系统环境安装
二、ROS2核心命令讲解
1、daemon-各种守护进程相关的子命令
查看帮助:
ros2 daemon -h启动daemon
ros2 daemon start查看状态
ros2 daemon status停止daemon
ros2 daemon stop守护进程用途:按照字面意思起到守护用途。类似ros1 master中心节点功能,用于减少节点之间发现的时间。
2、node-各种节点进程相关的子命令
启动一个节点用于测试
ros2 run demo_nodes_cpp talker输出节点列表:
ros2 node list查看节点信息
ros2 node info /talker3、pkg-各种包进程相关的子命令
创建功能包命令:指定包名、编译方式、依赖项、节点名等
命令格式:
ros2 pkg create RobotDotTest --build-type ament_python --node-name RobotDotTest_node --dependencies rclpy std_msgs sensor_msgs --license Apache-2.0| 命令 | 说明 |
| ros2 pkg create | ROS2功能包创建命令 |
| RobotDotTest | 所建功能包名称 |
| --build-type ament_python | 指定编程语言 |
| -node-name RobotDotTest_node | 节点名称 |
| --dependencies rclpy std_msgs sensor_msgs | 指定依赖模块,rclpy是python编程必选的, std_msgs和sensor_msgs是我们要用的消息模块,也可以不指定手动配置 |
| --license Apache-2.0 | 指定license Apache-2.0 |
查看
---------------------------------------
查看包列表
ros2 pkg list
executables输出特定于软件包的可执行文件列表:
ros2 pkg executables turtlesim
prefix 输出包的前缀路径:
ros2 pkg prefix turtlesim 
4、run运行特定软件包的可行性文件
ros2 run turtlesim turtlesim_noderos2 run [-h] [--prefix PREFIX] package_name executable_name ...
package_name 软件包名称
executable_name 执行名称
argv 执行对应参数5、topic各种话题进程相关的子命令
usage: ros2 topic [-h] [--include-hidden-topics]bw 显示使用话题带宽delay 通过header中的时间戳计算消息延迟echo 输出话题信息find 按消息类型查找相关话题hz 显示话题平均发布频率info 显示话题消息类型,订阅者数量,发布者数量list 列出域内可使用的主题列表pub 发布一个话题消息type 打印话题数据类型list 列出域内可使用的主题列表
ros2 topic listinfo 显示话题消息类型,订阅者数量,发布者数量
ros2 topic info /turtle1/posetype 打印话题数据类型
ros2 topic type /turtle1/posefind 按消息类型查找相关话题
ros2 topic find turtlesim/msg/Posepub 发布一个话题消息
ros2 topic pub control_node/action geometry_msgs/msg/TwistStamped "{header: {stamp:{sec: 0, nanosec: 0}, frame_id: control_node}, twist: {linear: {x: 0.3, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}}"echo 输出话题信息
ros2 topic echo /control_node/actionhz 显示话题平均发布频率
ros2 topic hz /control_node/action
打开节点主题显示图形
rqt_graph
打开主题列表
ros2 topic list -t
查看主题数据
ros2 topic echo <topic_name>
ros2 topic echo /turtle1/cmd_vel
查看主题信息
ros2 topic info /turtle1/cmd_vel
查看主题数据结构
ros2 interface show geometry_msgs/msg/Twist
发布主题数据消息
ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
注:--once 单次发送 --rate 1 循环发送频率1HZ
查看主题信息
ros2 topic echo /turtle1/pose
查看主题发送速率
ros2 topic hz /turtle1/pose
6、security各种安全进程相关的子命令
create_enclave Create enclavecreate_key 创建秘钥create_keystore 创建秘钥库create_permission 创建许可generate_artifacts 从身份和策略文件列表中生成密钥和许可文件generate_policy Generate XML policy file from ROS graph datalist_enclaves List enclaves in keystorelist_keys DEPRECATED: List enclaves in keystore. Use list_enclaves instead7、service各种服务进程相关的子命令
call调用服务
list列出所有的服务
ros2 service list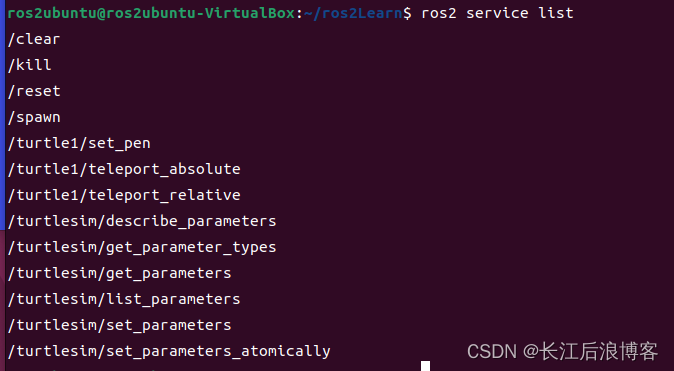
服务基于呼叫->应答模型
查看服务列表
ros2 service list
ros2 service list -t
查看服务类型
ros2 service type <service_name>
ros2 service type /clear
查看服务查找
ros2 service find <type_name>
ros2 service find std_srvs/srv/Empty
服务展示显示
ros2 interface show <type_name>.srv
ros2 interface show std_srvs/srv/Empty.srv
ros2 interface show turtlesim/srv/Spawn
服务调用call
ros2 service call <service_name> <service_type> <arguments>
ros2 service call /clear std_srvs/srv/Empty
ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: 'turtle2'}"
7、ROS2参数
查看参数列表
ros2 param list
ros2参数get
ros2 param get <node_name> <parameter_name>
ros2 param get /turtlesim background_g
ros2 参数set
ros2 param set <node_name> <parameter_name> <value>
ros2 param set /turtlesim background_r 150
ros2参数存储
ros2 param dump <node_name>
ros2 param dump /turtlesim
ros2 参数加载
ros2 param load <node_name> <parameter_file>
ros2 param load /turtlesim ./turtlesim.yaml
ros2 节点启动时加载参数
ros2 run <package_name> <executable_name> --ros-args --params-file <file_name>
ros2 run turtlesim turtlesim_node --ros-args --params-file ./turtlesim.yaml
8、ROS2操作Action
(1)节点信息查看
ros2 node info /turtlesim
ros2 node info /teleop_turtle
(2)查询操作列表
ros2 action list
ros2 action list -t
(3)操作动作信息
ros2 action info /turtle1/rotate_absolute
(4)操作界面显示
ros2 interface show turtlesim/action/RotateAbsolute
(5)发送目标动作
ros2 action send_goal <action_name> <action_type> <values>
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.57}"
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: -1.57}" --feedback
9、ROS2消息日志
消息等级:
Fatal消息指示系统将终止以尝试保护自身免受损害。
Error消息指示不一定会损坏系统,但会阻止其正常运行的重大问题。
Warn消息指示可能代表更深层次问题的意外活动或非理想结果,但不会完全损害功能。
Info消息指示事件和状态更新,用于直观验证系统是否按预期运行。
Debug消息详细说明了系统执行的整个分步过程。
启动信息终端
ros2 run rqt_console rqt_console
设置节点启动消息等级
ros2 run turtlesim turtlesim_node --ros-args --log-level WARN
10、ROS2自启动节点launch
执行自动文件
ros2 launch <package_name> <launch_file_name>
ros2 launch <path_to_launch_file>
执行自动文件后接参数
ros2 launch <package_name> <launch_file_name> background_r:=255
ros2 launch <path_to_launch_file> background_r:=255
参考启动文件
<!-- example.launch.xml -->
<launch>
<!-- args that can be set from the command line or a default will be used -->
<arg name="background_r" default="0"/>
<arg name="background_g" default="255"/>
<arg name="background_b" default="0"/>
<arg name="chatter_ns" default="my/chatter/ns"/>
<!-- include another launch file -->
<include file="$(find-pkg-share demo_nodes_cpp)/launch/topics/talker_listener.launch.py"/>
<!-- include another launch file in the chatter_ns namespace-->
<group>
<!-- push-ros-namespace to set namespace of included nodes -->
<push-ros-namespace namespace="$(var chatter_ns)"/>
<include file="$(find-pkg-share demo_nodes_cpp)/launch/topics/talker_listener.launch.py"/>
</group>
<!-- start a turtlesim_node in the turtlesim1 namespace -->
<node pkg="turtlesim" exec="turtlesim_node" name="sim" namespace="turtlesim1"/>
<!-- start another turtlesim_node in the turtlesim2 namespace and use args to set parameters -->
<node pkg="turtlesim" exec="turtlesim_node" name="sim" namespace="turtlesim2">
<param name="background_r" value="$(var background_r)"/>
<param name="background_g" value="$(var background_g)"/>
<param name="background_b" value="$(var background_b)"/>
</node>
<!-- perform remap so both turtles listen to the same command topic -->
<node pkg="turtlesim" exec="mimic" name="mimic">
<remap from="/input/pose" to="/turtlesim1/turtle1/pose"/>
<remap from="/output/cmd_vel" to="/turtlesim2/turtle1/cmd_vel"/>
</node>
</launch>
11、数据记录和播放
建立测试环境
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
建立记录数据存储区域
mkdir bag_files
cd bag_files
选择对应主题信息
ros2 topic list
ros2 topic echo /turtle1/cmd_vel
数据记录命令
ros2 bag record <topic_name>
ros2 bag record /turtle1/cmd_vel
记录多个主题信息
ros2 bag record -o subset /turtle1/cmd_vel /turtle1/pose
查看记录信息
ros2 bag info <bag_file_name>
ros2 bag info subset
播放记录信息
ros2 bag play subset
ros2 topic hz /turtle1/pose
本节文章到此结束,谢谢大家阅读。。。
相关文章:
【手把手做ROS2机器人系统开发二】熟悉ROS2基本命令
【手把手做ROS2机器人系统开发二】熟悉ROS2基本命令 目录 【手把手做ROS2机器人系统开发二】熟悉ROS2基本命令 一、上讲回顾 二、ROS2核心命令讲解 1、daemon-各种守护进程相关的子命令 2、node-各种节点进程相关的子命令 3、pkg-各种包进程相关的子命令 4、run运行特定软…...
如何训练个人的ChatGpt4
如何在自己的计算机上安装类似 ChatGPT 的个人 AI 并在没有互联网的情况下运行它 个人 AI 的“第一台 PC”时刻 这是个人AI的“第一台PC”时刻,随之而来的是限制,就像在车库里生产第一台Apple 1一样。你是先驱。今天,任何人都可以使用私人和…...
Rabbit与springboot整合-1
目录 1、整体结构 2、pom引入 3、配置文件 4、代码 公共类 controller类 JSON转换类 监听-接收发送消息类 1、整体结构 2、pom引入 <!--rabbitmq--> <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-st…...
项目沟通管理5大技巧 第4个很重要
1、充分使用twitter管理沟通模型 项目沟通会议可以充分使用witter的管理沟通模型,提高会议沟通效率。使用此模型,主要是有三步: 第一步:倾听,项目经理需要保持中立的立场,不先表态,让团队成员畅…...
vector(入门知识点)
目录 vector的介绍 编辑 例:遍历 拷贝: 初始化: 反向迭代器: 扩容: insert与erase vector的介绍 例:遍历 拷贝: 初始化: (10个1) vector<int>注意…...

成人高考专业怎么选?看这三点
专业选得好,以后学习、考试和就业都会走得更加顺畅。 想简单拿个大专或者本科学历文凭,最好选择容易毕业的,比如工商管理、行政管理文史类专业,相对简单容易。 为了满足考证需要的,选对口的专业,比如要考一…...
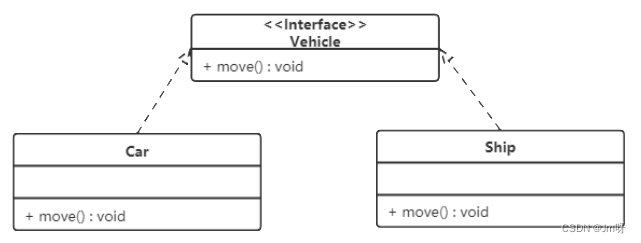
设计模式:UML中的类图(6种关系)
一.UML图介绍 统一建模语言是用来设计软件的可视化建模语言。它的特点是简单、统一、图形化、能表达软件设计中的动态与静态信息。 UML 从目标系统的不同角度出发,定义了用例图、类图、对象图、状态图、活动图、时序图、协作图、构件图、部署图等 9 种图。 二.类图…...
00后卷王的自述,我真有同事口中说的那么卷?
前言 前段时间去面试了一个公司,成功拿到了offer,薪资也从14k涨到了20k,对于工作都还没几年的我来说,还是比较满意的,毕竟一些工作5、6年的可能还没我高。 我可能就是大家口中的卷王,感觉自己年轻…...
VS2022配置OpenGL+GLAD
Glew(The OpenGL Extension Wrangler Library)是对底层OpenGL接口的封装,可以让你的代码跨平台。Glad与Glew作用相同,可以看作它的升级版。 Freeglut(OpenGL Utility Toolkit)主要用于创建并管理窗口和Ope…...

javascript for循环的定义
循环代码可以执行指定的次数 不同类型的循环: javascript支持不同类型的循环 for-循环代码块的一定次数 for/in-循环遍历对象的属性 while-当指定的条件为true时循环指定的代码块 do/while-当指定的条件为true时循环指定的代码块 for循环的语法: …...

【安全与风险】安全研究的新课题
安全研究的新课题 第一部分 主题概述和普适计算目的两种类型的研究人员从事安全和隐私研究关注重点更大的愿景:普适计算什么是普适/泛在计算?普及计算推动者第一个推动者:传感器/执行器例1:无线电传感器例2:RFIDs(“智能标签”)例3:Crowdsensing:实现大规模泛在感知 第二个推动…...
4核8G云服务器腾讯云CVM S5和轻量应用服务器性能差异?
腾讯云4核8G云服务器可以选择轻量应用服务器或CVM云服务器标准型S5实例,轻量4核8G12M服务器446元一年,CVM S5云服务器935元一年,相对于云服务器CVM,轻量应用服务器性价比更高,轻量服务器CPU和CVM有区别吗?性…...

【对比】文心一言对飚ChatGPT实操对比体验
前言 🍊缘由 百度【文心一言】体验申请通过 本狗中午干饭时,天降短信,告知可以体验文心一言,苦等一个月的实操终于到来。心中这好奇的对比心理油然而生,到底是老美的【ChatGPT】厉害,还是咱度娘的【文心一…...
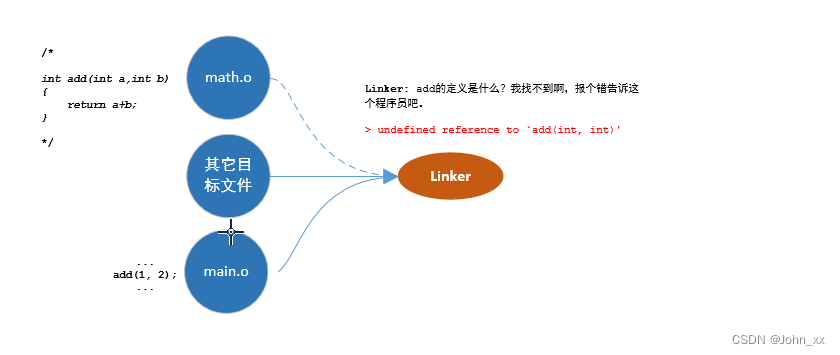
C++:Article:链接器(二):符号决议
链接器 1. C源文件都有些什么1.1 . 目标文件里有什么 2. 符号表 Symbol table2.1. 符号表的位置2.2. 符号的决议2.3. 符号决议过程 3. 实例说明3.1. 意外出现3.2 总结排查 在上篇文章中,我们介绍了 链接器基本概念,我们知道所有的应用程序否是连接器将所…...
期权价格上下限与期权平价关系
目录 1. 期权的基本概念 2. 期权的上下限 3. 期权的平价关系 1. 期权的基本概念 期权:是一种选择权,期权买方向卖方支付一定数额的 期权费 后,可获得在 一定时间(到期日)内以 一定价格(执行价格&#x…...

QT中TCP的学习
文章目录 qt中TCP的实现 qt中TCP的实现 学习视频 QT中可以通过TCP协议让服务器和客户端之间行通信。服务器和客户端的具体流程 下方的信号都是系统提供的,我们只需要写相应的槽函数 A、服务器: 创建QTcpServer对象启动服务器(监听&…...

编译选项与常用环境变量
一、编译选项与常用环境变量 1、命令选项 -D 相当于就是定义,-D 可以理解为告诉cmake 后边我要定义一些参数,每定义一个就在前边加上-D就可以了,示例: #!/bin/shcmake -DTEST_DEBUGON . cmake --build .2、编译选项 下面列出来的…...
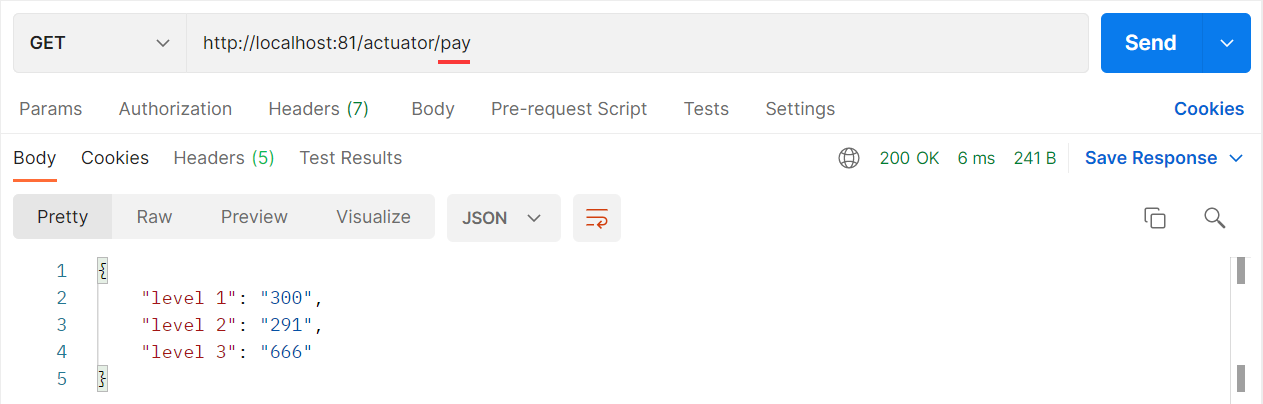
【SpringBoot2】SpringBoot开发实用篇
SpringBoot开发实用篇 KF-1.热部署 什么是热部署?简单说就是你程序改了,现在要重新启动服务器,嫌麻烦?不用重启,服务器会自己悄悄的把更新后的程序给重新加载一遍,这就是热部署。 热部署的功能是如…...

接口自动化测试框架搭建全部过程
思想: 1、基本目录的搭建 report:静态输出目录(报告或者日志) data:静态输入目录(可以存放Excel数据,被读取的一些数据) utils:实用方法层(这里存放的是项目的公共方法,一般拿到别…...
--DML_多表查询(针对数据表记录的join查询、子查询的操作))
SQL学习(十)--DML_多表查询(针对数据表记录的join查询、子查询的操作)
目录 1. 多表查询 -- 内连接查询 1.1 显示内连接 1.2 隐式内连接 2. 多表连接 -- 外连接查询...

PhonePi-MCP:基于MCP协议实现AI智能体自动化操控Android手机
1. 项目概述:当你的手机成为AI的“眼睛”与“双手” 最近在折腾AI智能体(Agent)时,我一直在思考一个问题:如何让这些运行在云端或本地电脑上的“大脑”真正地与现实世界互动?比如,让它帮我查一…...

北京明光云振铎数据科技Java面经
Nacos、OpenFeign、Gateway 三个组件的作用及协作流程首先:Nacos 主要负责服务注册发现和配置中心Gateway 作为统一网关入口,负责路由、鉴权、限流OpenFeign 负责服务之间的远程调用用户请求先进入 GatewayGateway 会先做 JWT 鉴权,比如校验 …...

开源数字资产管理平台OpenClaw Studio:架构设计与工程实践
1. 项目概述:一个面向创意工作者的开源数字资产管理工具最近在和一些独立开发者、小型创意团队的朋友聊天时,大家普遍提到一个痛点:项目文件、素材、版本管理越来越乱。设计稿、代码、文档、参考图散落在电脑各个角落,团队协作时经…...

基于RK3568的边缘AIoT实战:多模态行为识别系统设计与优化
1. 项目概述:从赛题到全国一等奖的实战复盘去年,我们团队抱着“试试看”的心态参加了瑞芯微与飞凌嵌入式联合举办的全国大学生嵌入式设计大赛,最终捧回了全国一等奖的奖杯。现在比赛尘埃落定,我想把整个项目从破题、选型、开发到最…...

aztfexport扩展开发:如何自定义资源映射和导入逻辑
aztfexport扩展开发:如何自定义资源映射和导入逻辑 【免费下载链接】aztfexport A tool to bring existing Azure resources under Terraforms management 项目地址: https://gitcode.com/gh_mirrors/az/aztfexport Azure Export for Terraform(a…...

超大规模云服务外计算资源交易:虽有风险但概念已验证,或成新资源获取选项
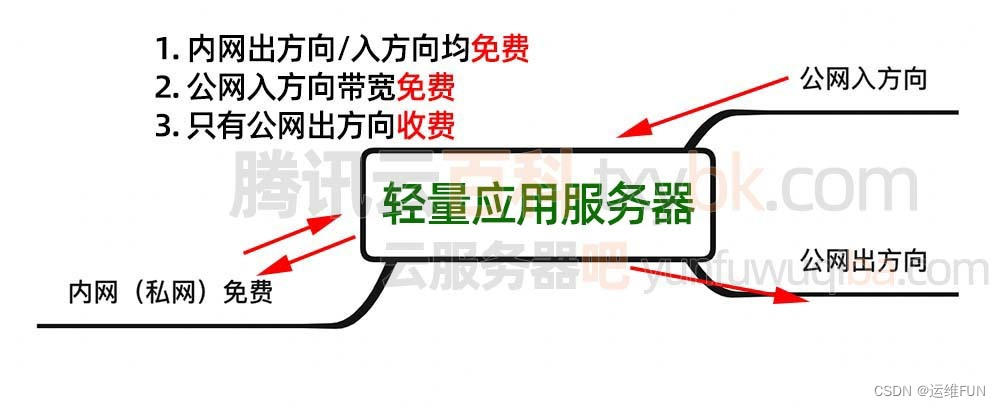
经济合理性这一趋势积极面易理解。一是价格,有多余计算能力的非超大规模云服务提供商成本结构等与主要供应商不同,闲置资源或低价出售,对控制成本企业重要。二是效率,利用已有计算能力满足需求,无需新建数据中心等&…...

容器化应用分发平台seait:简化部署流程,实现一键运行
1. 项目概述:一个面向开发者的容器化应用分发平台最近在折腾个人项目部署和团队协作时,我一直在思考一个问题:如何能像分发一个可执行文件一样,轻松地分享和运行一个完整的、包含所有依赖的应用程序?尤其是在跨平台、跨…...

AI代码助手Cursor与Django全栈开发:十倍速构建Web应用实战
1. 项目概述:当AI代码助手遇上Django全栈开发如果你是一名独立开发者、初创团队的技术负责人,或者正在学习全栈开发,那么你一定对如何高效构建一个现代化的Web应用感到头疼。从环境配置、数据库设计、API接口开发到前端页面渲染,每…...

Adafruit Metro M4 AirLift开发板:硬件解析与物联网开发实战
1. 项目概述与硬件解析如果你正在寻找一款既能提供强大本地计算能力,又能轻松接入无线网络的微控制器开发板,那么Adafruit Metro M4 Express AirLift绝对是一个值得深入研究的选项。它不是简单的单片机加WiFi模块的堆砌,而是一个经过精心整合…...

Cursor编辑器深度美化:CSS注入与动态特效实现全解析
1. 项目概述:当代码编辑器拥有了“皮肤”与“特效”如果你和我一样,每天有超过8小时的时间是在代码编辑器里度过的,那么你一定理解一个顺眼、顺手、甚至有点“酷”的编辑环境意味着什么。它不仅仅是生产力的工具,更是我们开发者思…...