超越YOLOv8,飞桨推出精度最高的实时检测器RT-DETR!
众所周知,实时目标检测( Real-Time Object Detection )一直由 YOLO 系列模型主导。
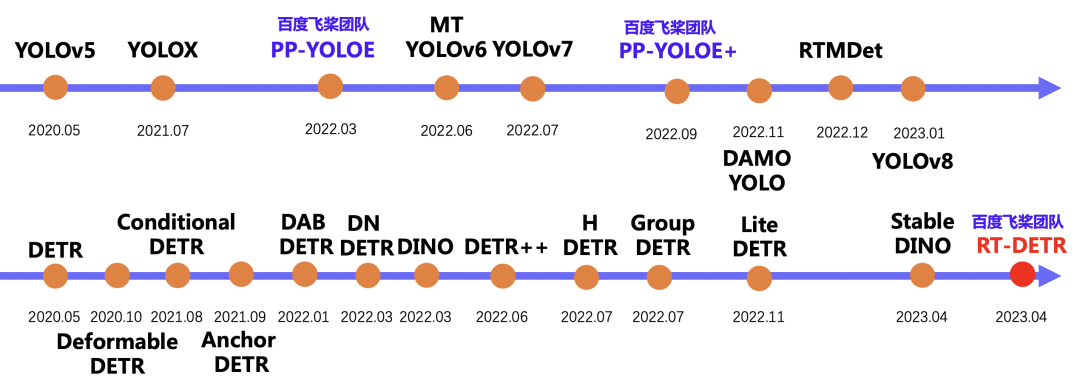
飞桨在去年 3 月份推出了高精度通用目标检测模型 PP-YOLOE ,同年在 PP-YOLOE 的基础上提出了 PP-YOLOE+ 。后者在训练收敛速度、下游任务泛化能力以及高性能部署能力方面均达到了很好的效果。而继 PP-YOLOE 提出后,MT-YOLOv6、YOLOv7、DAMO-YOLO、RTMDet 等模型先后被提出,一直迭代到今年开年的 YOLOv8。
而我们一直在思考,实时目标检测器除了 YOLO 是否还有其他技术路线可以探索呢?
YOLO 检测器有个较大的待改进点是需要 NMS 后处理,其通常难以优化且不够鲁棒,因此检测器的速度存在延迟。为避免该问题,我们将目光移向了不需要 NMS 后处理的 DETR,一种基于 Transformer 的端到端目标检测器。然而,相比于 YOLO 系列检测器,DETR 系列检测器的速度要慢的多,这使得"无需 NMS "并未在速度上体现出优势。上述问题促使我们针对实时的端到端检测器进行探索,旨在基于 DETR 的优秀架构设计一个全新的实时检测器,从根源上解决 NMS 对实时检测器带来的速度延迟问题。
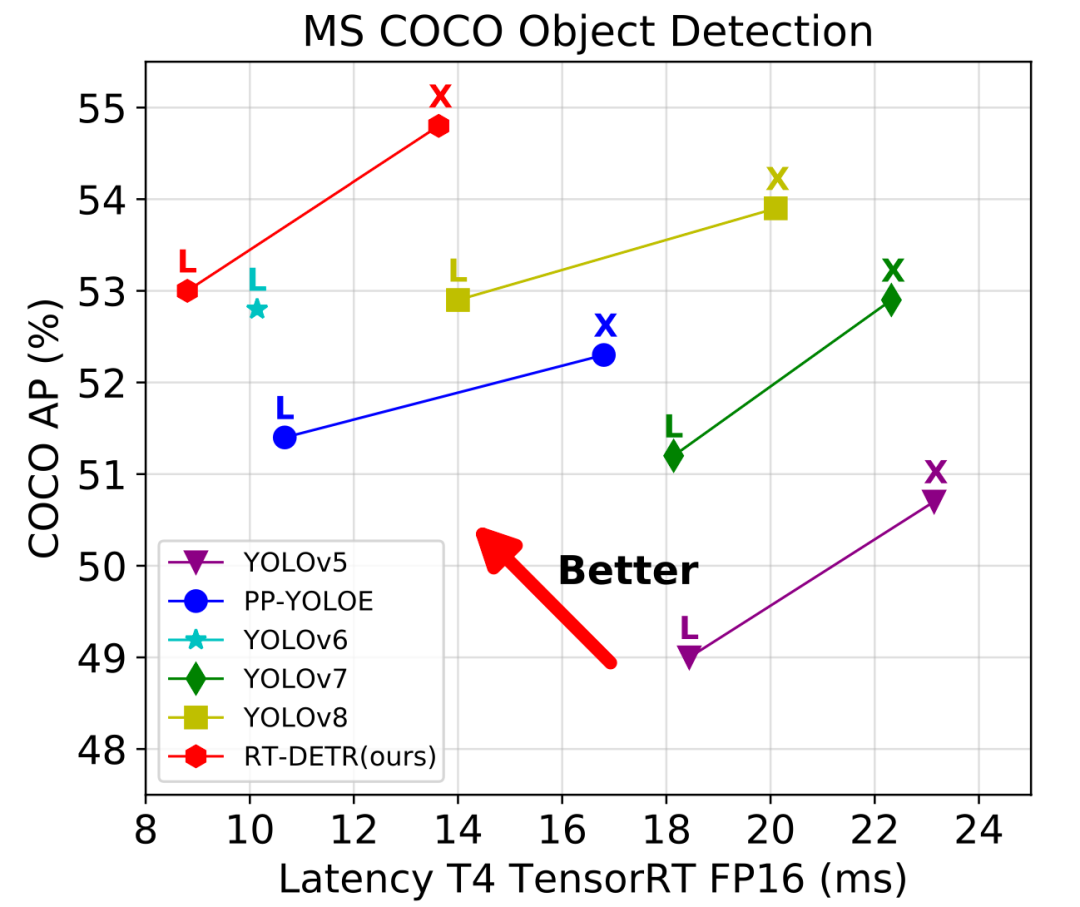
由此,我们正式推出了——RT-DETR (Real-Time DEtection TRansformer) ,一种基于 DETR 架构的实时端到端检测器,其在速度和精度上取得了 SOTA 性能。
-
点击文末阅读原文快速体验 RT-DETR
https://github.com/PaddlePaddle/PaddleDetection/tree/develop/configs/rtdetr
-
论文地址:
https://arxiv.org/abs/2304.08069
关于 PaddleDetection 的技术问题欢迎大家入群讨论,也欢迎大家在 GitHub 点 star 支持我们的工作!

NMS 分析
书接上文,具体分析 NMS 。
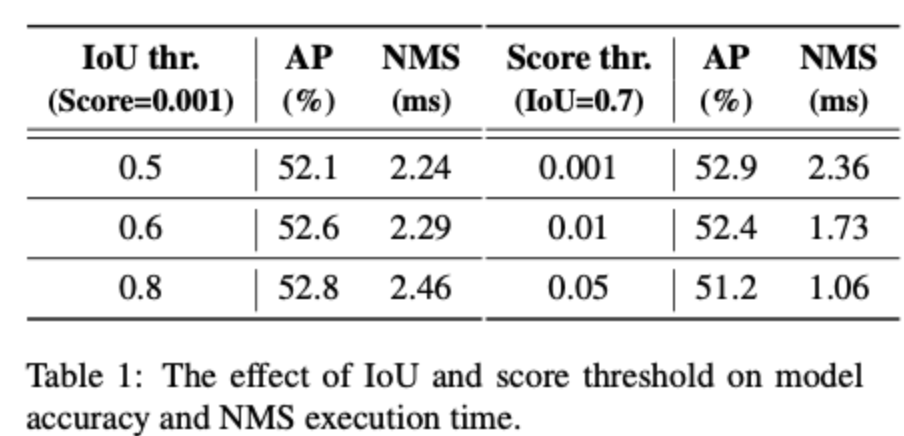
NMS 是目标检测领域常用的后处理技术,用于去除检测器产生的重叠较多的检测框,其包含两个超参数:置信度阈值和 IoU 阈值。具体来说,低于置信度阈值的框被直接过滤,并且如果两个检测框的交并比大于 IoU 阈值,那么其中置信度低的框会被滤除。该过程迭代执行,直到所有类别都被处理完毕。因此,NMS 算法的执行时间取决于预测框数量和上述两个阈值。为了更好地说明这一点,我们使用 YOLOv5 (anchor-based) 和 YOLOv8 (anchor-free) 进行了统计和实测,测量指标包括不同置信度阈值下剩余的检测框的数量,以及在不同的超参数组合下检测器在 COCO 验证集上的精度和 NMS 的执行时间。实验结果表明,NMS 不仅会延迟推理速度,并且不够鲁棒,需要挑选合适的超参数才能达到最优精度。这一实验结果有力证明设计一种实时的端到端检测器是具有重要意义的。

RT-DETR结构设计
近年来,得益于研究者们在加速训练收敛和降低优化难度上做出的努力, DETR 系列模型已经获得了优秀的性能。然而,DETR 与现有实时检测器在速度上存在巨大差距,因此,将其推向实时化面临巨大的挑战。我们在分析了 DETR 变体模型的架构中各组件对速度和精度的影响后,将主要优化目标定在编码器部分。现有的多尺度 Transformer 编码器在多个尺度的特征之间进行注意力运算,同时进行尺度内和尺度间特征交互,计算消耗较大。为了减少计算消耗,一个简单的办法是直接削减编码器层数。但是我们认为这并不能从根本上解决问题并且势必会对精度造成较大影响,更本质的方法应该是要解耦这种尺度内和尺度间的同时交互,缩短输入编码器的序列长度。
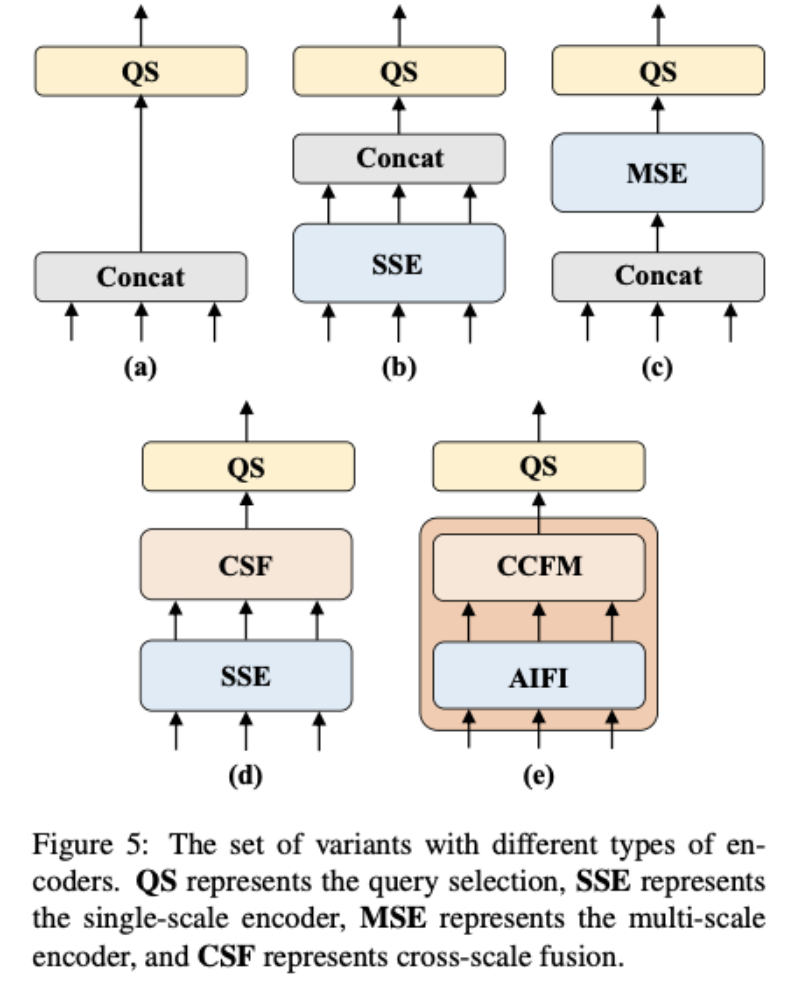
为此,我们设计了一系列编码器变体来验证解耦尺度内和尺度间特征交互的可行性并最终演化为我们提出的 HybridEncoder ,其包括两部分:Attention-based Intra-scale Feature Interaction (AIFI) 和 CNN-based Cross-scale Feature-fusion Module (CCFM) 。最后的实验结果证明了这一思路是可行的,并且可以同时在速度和精度上带来正向收益。

为了进一步提高 RT-DETR 的精度,我们又将目光移向了 DETR 架构的另外两个关键组件: Query Selection 和 Decoder 。 Query Selection 的作用是从 Encoder 输出的特征序列中选择固定数量的特征作为 object queries ,其经过 Decoder 后由预测头映射为置信度和边界框。现有的 DETR 变体都是利用这些特征的分类分数直接选择 top-K 特征。然而,由于分类分数和 IoU 分数的分布存在不一致,分类得分高的预测框并不一定是和 GT 最接近的框,这导致高分类分数低 IoU 的框会被选中,而低分类分数高 IoU 的框会被丢弃,这将会损害检测器的性能。
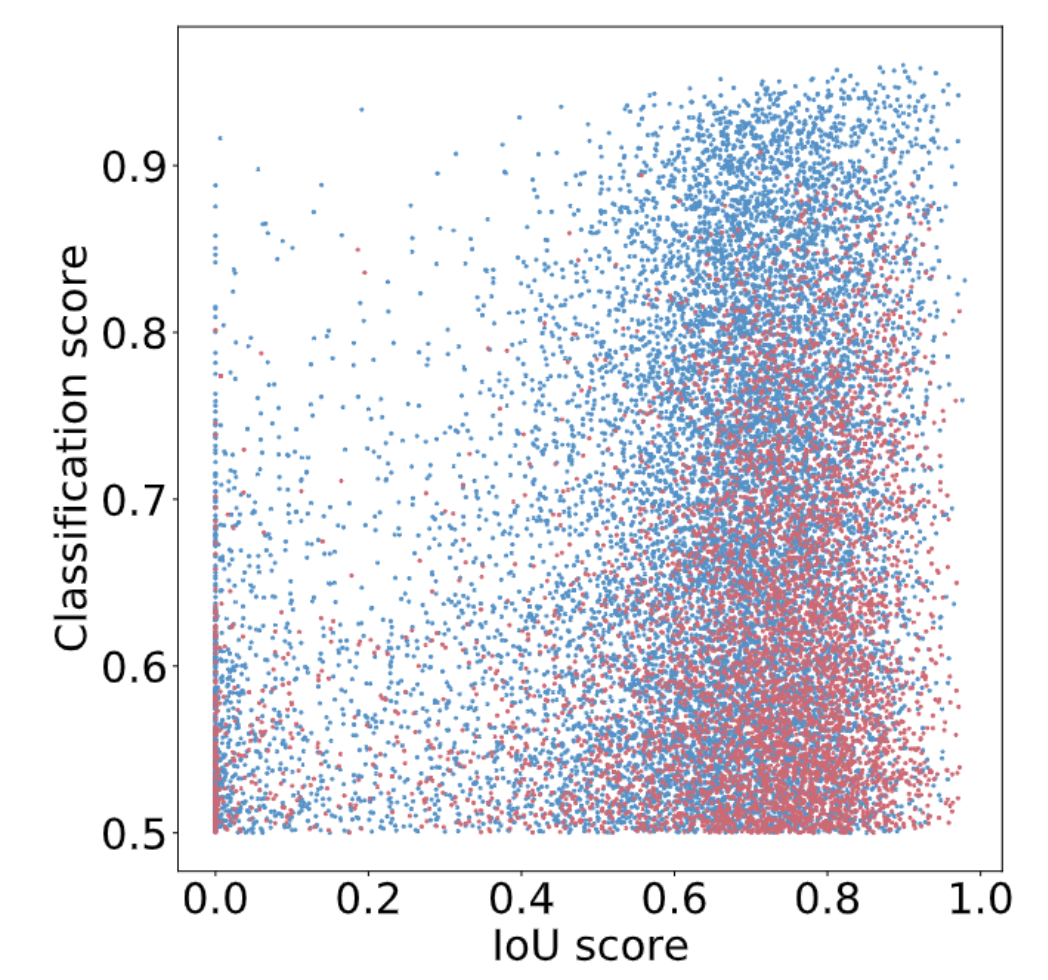
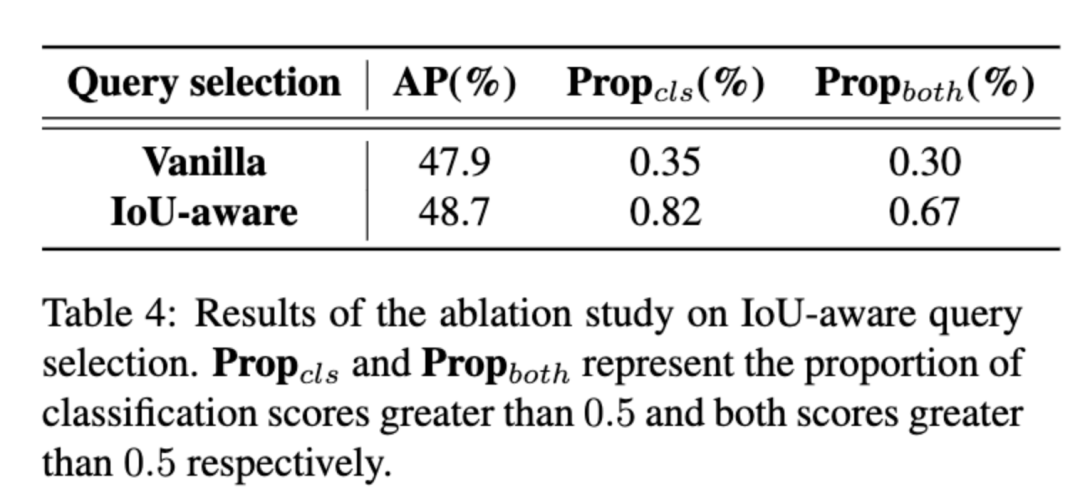
为解决这一问题,我们提出了 IoU-aware Query Selection ,通过在训练期间约束检测器对高 IoU 的特征产生高分类分数,对低 IoU 的特征产生低分类分数。从而使得模型根据分类分数选择的 top-K 特征对应的预测框同时具有高分类分数和高 IoU 分数。我们通过可视化这些编码器特征的置信度分数以及与 GT 之间的 IoU 分数后发现,IoU-aware Query Selection(蓝色点)明显提高了被选中特征的质量(集中于右上角)。对于 Decoder ,我们并没有对其结构进行调整,目的是为了方便使用高精度的 DETR 的大检测模型对轻量级 DETR 检测器进行蒸馏,我们认为这是未来可探索的一个方向。
最终我们的 RT-DETR 整体结构如下图所示:
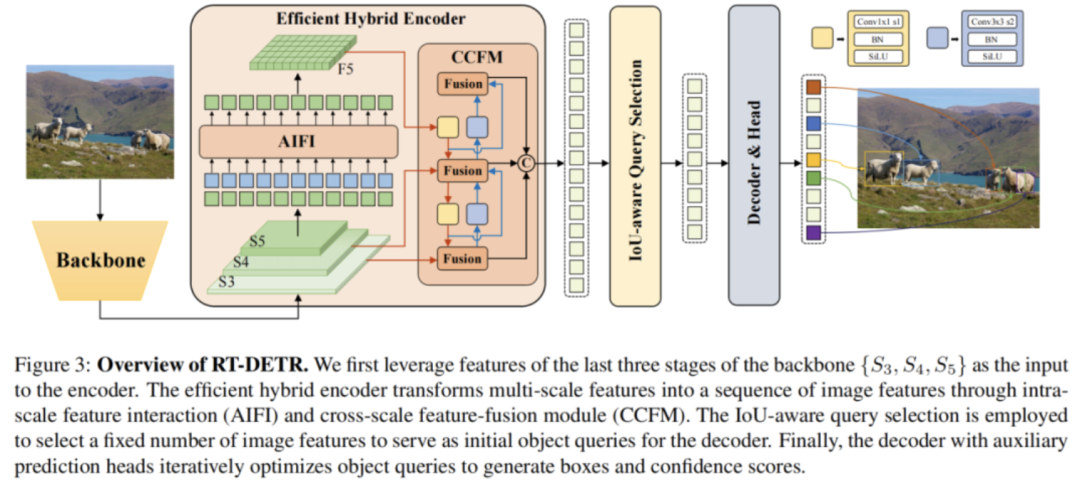
对于 backbone 部分,我们采用了经典的 ResNet 和可缩放的 HGNetv2 两种,我们本次使用两种 backbone 各训练了两个版本的 RT-DETR ,以 HGNetv2 为 backbone 的 RT-DETR 包括 L 和 X 版本,以 ResNet 为 backbone 的 RT-DETR 则包括 RT-DETR-R50 和 RT-DETR-R101 。 RT-DETR-R50 / 101 方便和现有的 DETR 变体进行对比,而 RT-DETR-L / X 则用来和现有的实时检测器( YOLO 系列模型)进行对比。
对于数据增强和训练策略部分,我们的数据增强采用的是基础的随机颜色抖动、随机翻转、裁剪和 Resize ,并且在验证和推理时图像的输入尺寸统一为 640 ,与 DETR 系列的处理方式有较大的不同,主要是为了满足实时性的要求。我们的训练策略则是和 DETR 系列基本相同,优化器同样采用 AdamW ,默认在 COCO train2017 上训练 6x ,即 72 个 epoch 。
另外,考虑到多样化的应用场景,实时检测器通常会提供多个不同尺度的模型,RT-DETR 同样可以进行缩放,我们通过调整 CCFM 中 RepBlock 的数量和 Encoder 的编码维度分别控制 Hybrid Encoder 的深度和宽度,同时对 backbone 进行相应的调整即可实现检测器的缩放。

实验结果

和实时检测器对比
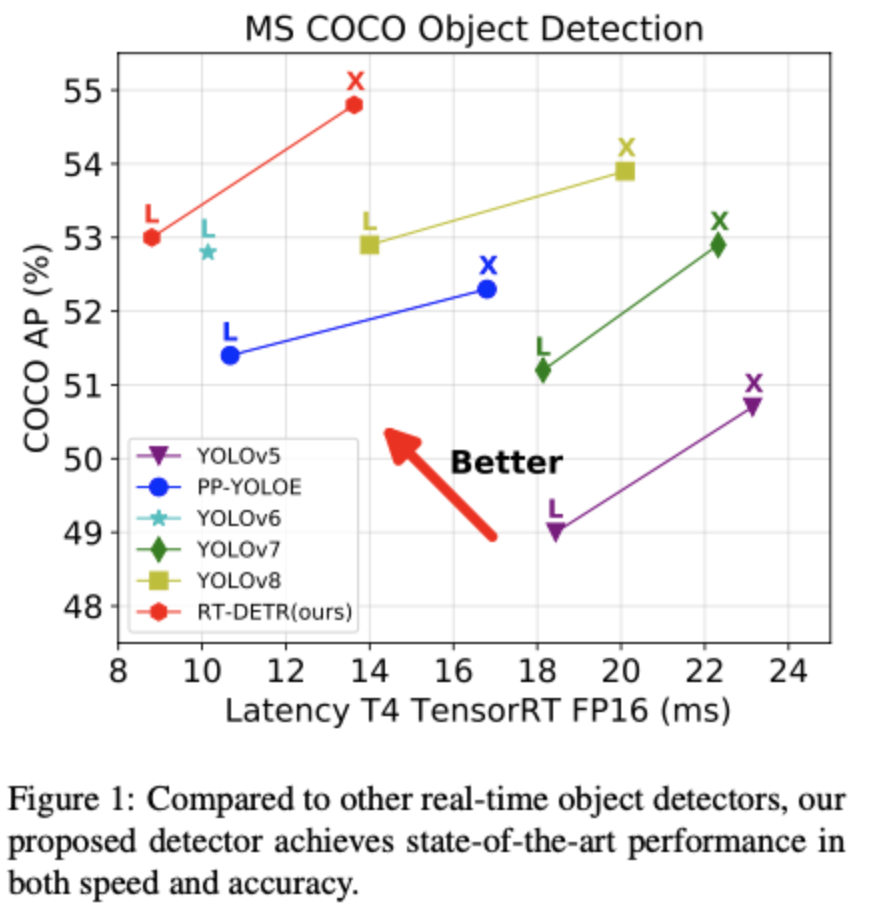
RT-DETR-L 在 COCO val2017 上的精度为 53.0% AP ,在 T4 GPU 上的 FPS 为 114,RT-DETR-X 的精度为 54.8% AP,FPS 为 74。相同尺度的版本下,RT-DETR 比 YOLO 系列检测器的精度都更高一些,端到端速度都更快一些。

和端到端检测器对比
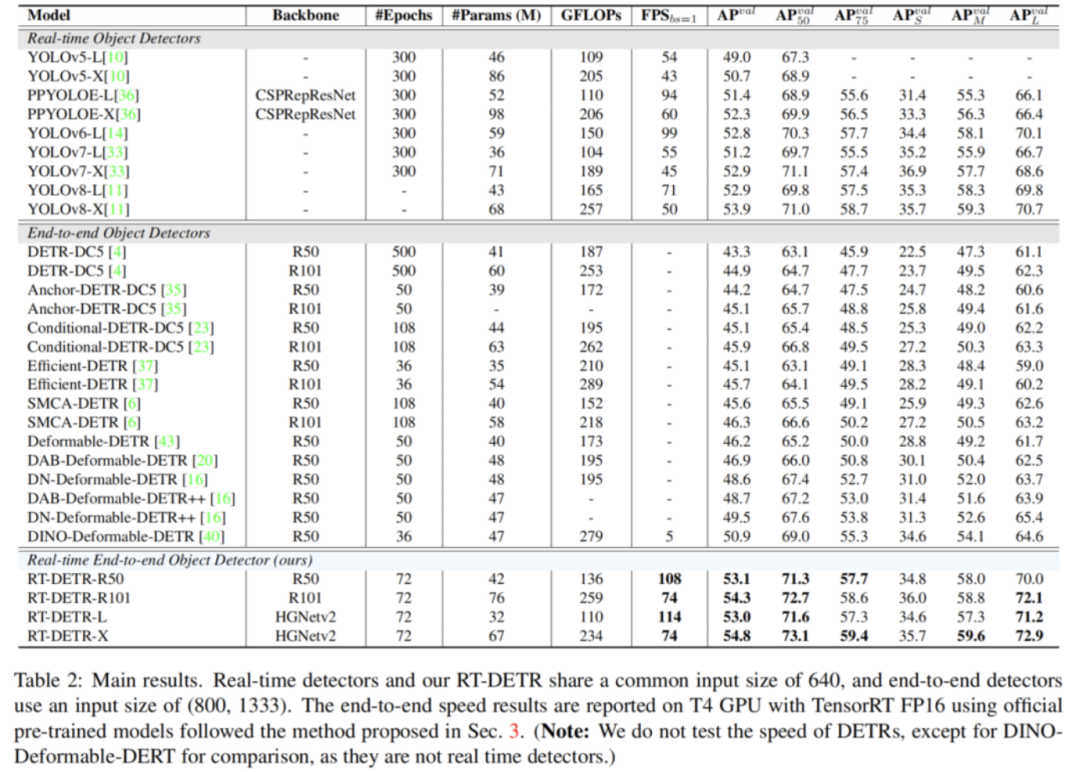
RT-DETR-R50 在 COCO val2017 上的精度为 53.1% AP,在 T4 GPU 上的 FPS 为 108,RT-DETR-R101 的精度为 54.3% AP,FPS 为 74。总结来说,RT-DETR 比具有相同 backbone 的 DETR 系列检测器有比较显著的精度提升和速度提升。
详细的实验数据见下表:

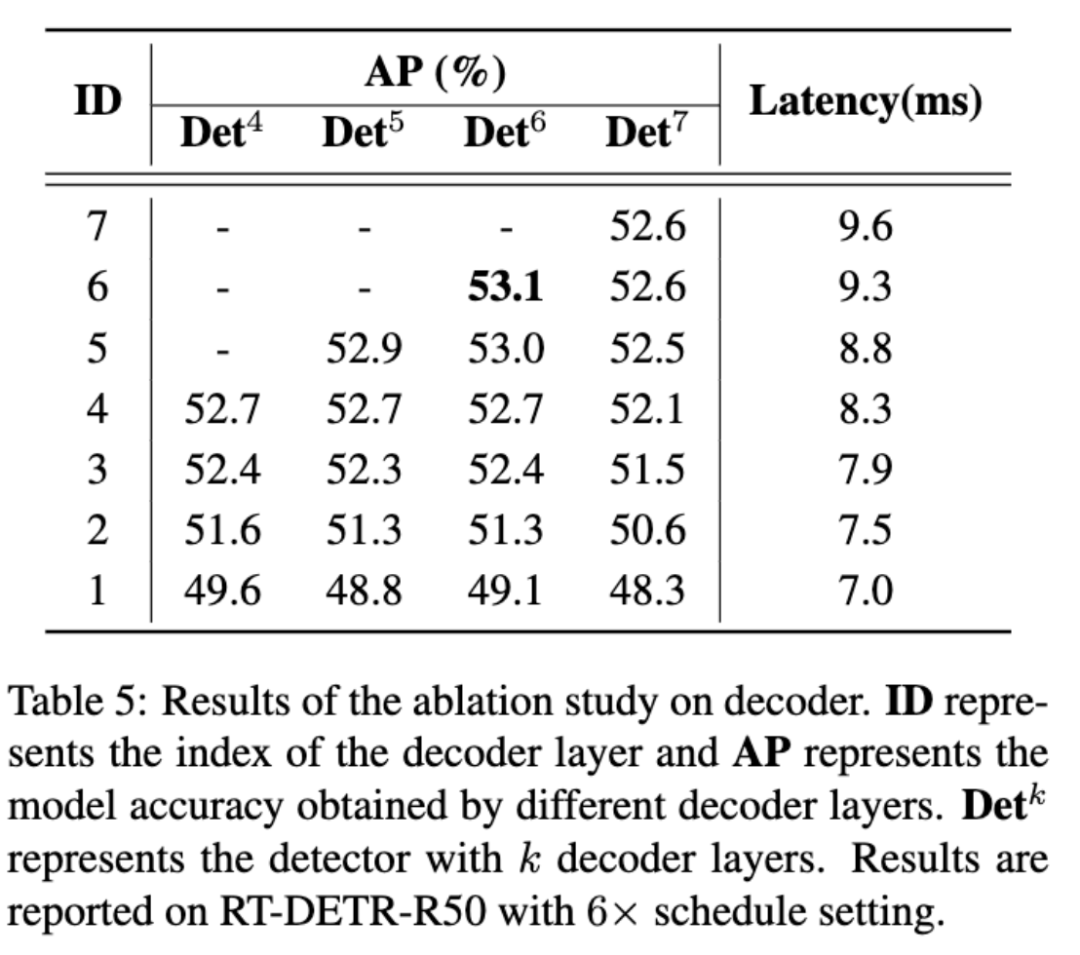
Decoder 消融实验
我们还对 Decoder 不同层的输出评估了精度,并测试了对应的检测器推理时间。RT-DETR 通过在推理时使用不同层数的 Decoder ,可以灵活的调整推理速度而不需要重新训练。我们发现减少少数的层( 1~2 )对精度产生的影响很小,而且可以显著提高推理速度,这为提供更轻量级的 RT-DETR(S or M) 提供了可行方案。

总结
在本文中,我们提出了一个实时的端到端检测器 RT-DETR ,克服了 NMS 对实时检测器推理速度的延迟和对精度的影响,对 DETR 的实时化进行了初步的探索和尝试,并提供了一种可行的解决方案。我们认为 RT-DETR 还有很多可以改进的地方,例如在小目标上的性能指标尚不如 YOLO 系列的部分检测器。在今后的研究中还可以继续优化,从而为实时目标检测这一领域提供更优的解决方案,为实际应用带来更好的体验。
预训练模型、部署等使用教程已全面发布,欢迎大家试用!详细链接可点击文末阅读原文快速体验!
相关文章:
超越YOLOv8,飞桨推出精度最高的实时检测器RT-DETR!
众所周知,实时目标检测( Real-Time Object Detection )一直由 YOLO 系列模型主导。 飞桨在去年 3 月份推出了高精度通用目标检测模型 PP-YOLOE ,同年在 PP-YOLOE 的基础上提出了 PP-YOLOE 。后者在训练收敛速度、下游任务泛化能力以及高性能部署能力…...

基于Docker安装Redis【保姆级教程、内含图解】
Redis官网:Redis Redis中文官网:CRUG网站 两者选其一即可,建议使用 Redis官网:Redis 学习任何框架和技术,一定要参考相应的官网学习,一定要参考官网学习!!! 目录 一、拉取…...

电子表格软件与一站式BI的区别
看完本节内容,相信您能够了解到电子表格软件(代号电子表格软件)与「一站式 BI」的主要区别。所谓一站式BI在官网上的名称就是Smartbi V10.5,代号就是Smartbi一直在使用insight。 这两个产品都属于商业智能BI软件的品类࿰…...
SpringCache
一、介绍 Spring Cache是一个框架,实现了基于注解的缓存功能,只需要简单地加一个注解,就能实现缓存功能,大大简化我们在业务中操作缓存的代码。 Spring Cache只是提供了一层抽象,底层可以切换不同的cache实现。具体就…...

Android Framework—Service
介绍 Service是一种可以在后台执行长时间运行操作而不提供界面的应用组件。服务可以由其他应用组件启动,而且即使用户切换到其他应用,服务仍将在后台继续运行。此外,组件可以通过绑定到服务与之进行交互,甚至是执行进程之间的通信…...
连续子数组的权值和最小)
leetcode (重排数组使得)连续子数组的权值和最小
题目描述:请重新排列某个仅包含2和3的数组,使得数组的所有连续子数组权值之和最小数组的权值定义为,数组中所有元素之积的因子个数,例如:rank([2,3])4 x p 1 c 1 p 2 c 2 p 3 c 3 ⋅ ⋅ ⋅ p k c k r a n k ( c 1 1 ) ( c …...
)
JSP计算机等级考试查询系统(源代码+论文+答辩PPT)
第一章 引言 计算机等级考试查询系统是有其开发的必要性的,它的应用将大大节省了学校的人力资源,从而从人工劳动中解脱出来。我们这次开发的软件系统一共包括了三个部分:等级考试的报名系统、查询系统和管理系统。其中管理系统是另外两部分…...

python 基础系列篇:七、以函数方式编写一个数字华容道
python 基础系列篇:七、以函数方式编写一个数字华容道 数字华容道游戏分析开始编写完整代码代码解说定义方法的规律 小结 数字华容道 嗯,就是一个简单的益智游戏,把数字按照特定规律排列,并比矩阵少一个格,用来进行移…...

2023年前端面试题
1.position都有哪些属性 2.1px等于多少rem,rem根据根元素的大小,根元素是谁 3.Es6操作数组的方法 4.防抖和节流以及应用场景 5.Vue和ajax最大的区别是什么(Vue和ajax怎么操作dom的,vue虚拟dom) 6.js数据类型有哪些&…...

快速入门量化交易
本文首发自「慕课网」,想了解更多IT干货内容,程序员圈内热闻,欢迎关注"慕课网"! 原作者:袁霄|慕课网讲师 近来“量化交易”这个词听得越来越频繁,多数人对量化交易的第一印象是“高大上的技术”…...

Mongodb oplog
在MongoDB复制集中,oplog信息存储在oplog.rs集合中。 oplog.rs集合是一个固定大小的集合(capped collection),它位于local数据库中。 当我们在源MongoDB实例上启用了复制(replication)功能,MongoDB会自动在local数据库中创建oplog.rs集合。此后,所有在该实例上的写操作都会生…...

python基础篇: python字符串方法都有哪些?你知道多少?
❝ Python提供了丰富的字符串处理方法,可以方便地对字符串进行操作、处理和转换。在本文中,我们将介绍Python中常用的字符串方法。 ❞ python中字符串内置方法很多,可以通过dir()方式查看具体有哪些方法,下表是python字符串的全部…...

chmod 命令 (chmod 0660)
chmod的作用: 用于设置文件所有者和文件关联组的命令,就是控制用户的权限命令 注意事项: chown 需要超级用户 root 的权限才能执行此命令。 自己常用chmod 命令是 chmod 777 * 给所有文件权限 chmod 777 文件名 给单独文件权限 这个777 是怎么来的, 或者chmod 0660 这…...

Qt应用开发常用功能
Qt判断当前操作系统? #ifdef Q_OS_MAC //mac ... #endif#ifdef Q_OS_LINUX //linux ... #endif#ifdef Q_OS_WIN32 //win ... #endif#ifdef __arm__ //arm ... #endifQt实现应用程序关闭和重启? //关机按钮-点击槽函数 void SystemD::on_shutdownButton…...

麻了,部门新来的00后给我卷崩溃了...
今天上班开早会就是新人见面仪式,听说来了个很厉害的大佬,年纪还不大,是上家公司离职过来的,薪资已经达到中高等水平,很多人都好奇不已,能拿到这个薪资应该人不简单,果然,自我介绍的…...

代码随想录算法训练营第56天|583. 两个字符串的删除操作,72. 编辑距离
代码随想录算法训练营第56天|583. 两个字符串的删除操作,72. 编辑距离 583. 两个字符串的删除操作72. 编辑距离 583. 两个字符串的删除操作 题目链接:583. 两个字符串的删除操作,难度:中等 【实现代码】 class Solution { publi…...
【嵌入式笔/面试】嵌入式软件基础题和真题总结——操作系统
在学习的时候找到几个十分好的工程和个人博客,先码一下,内容都摘自其中,有些重难点做了补充! 才鲸 / 嵌入式软件笔试题汇总 嵌入式与Linux那些事 阿秀的学习笔记 小林coding 百问网linux 嵌入式软件面试合集 2022年春招实习十四面…...
)
2023浙江省赛“信息安全管理与评估“--Web渗透测试(高职组)
2022全国职业技能大赛“信息安全管理与评估”(高职组)任务书 2022全国职业技能大赛“信息安全管理与评估”任务书第一阶段竞赛项目试题第二阶段竞赛项目试题第三阶段竞赛项目试题任务2:Web渗透测试2022全国职业技能大赛“信息安全管理与评估”任务书 第一阶段竞赛项目试题 …...
垃圾收集器面试总结(二)
G1 收集器 G1 (Garbage-First) 是一款面向服务器的垃圾收集器,主要针对配备多颗处理器及大容量内存的机器。 以极高概率满足 GC 停顿时间要求的同时,还具备高吞吐量性能特征。 被视为 JDK1.7 中 HotSpot 虚拟机的一个重要进化特征。它具备以下特点: 并行与并发&am…...

语音交友app开发中的用户积分系统
引言 在当今数字时代,语音交友app已成为一种流行的社交工具。它们给用户提供了一个平台,在这里他们可以结交新朋友,分享他们的生活和信仰,并建立深厚的人际关系。然而,市场上存在大量的语音交友app,这使得…...

实时VLA到底值不值?从π0抓钢笔看推理速度优化与系统延迟补偿的代价
实时VLA到底值不值?从π0抓钢笔看推理速度优化与系统延迟补偿的代价 先说结论推理优化可通过CUDA图和图简化大幅降延时,但必须配合系统延迟标定与补偿才能在实际机器人上稳定运行。轨迹后处理中的速度自适应和空间优化能在不重训模型前提下加速执行&…...

2026 年 5 月消防刷题不提分?高质量刷题工具实测指南
2026 年消防设施操作员考试侧重实操应用与智慧消防,题型灵活性大幅提升,超 68% 考生面临刷题量大但分数停滞的困境。核心痛点集中在:消防设施操作员模拟题质量差、与真题命题逻辑不符(相似度低于 62%)、消防设施操作员…...
迟滞模型及其PSO算法参数辨识【含Matlab源码 15544期】)
【参数辨识】经典Prandtl–Ishlinskii(PI)迟滞模型及其PSO算法参数辨识【含Matlab源码 15544期】
💥💥💥💥💥💥💥💥💞💞💞💞💞💞💞💞💞Matlab领域博客之家💞&…...
 全解析|≤68kg 单个包装件部分模拟运输测试标准)
ISTA 2A-2011 (2022) 全解析|≤68kg 单个包装件部分模拟运输测试标准
前言ISTA 2A-2011 (2022) 属于 ISTA 2 系列部分模拟性能测试,专门针对重量不大于 68kg(150lb)的单个运输包装件设计,是中小型产品包装最常用的入门级运输验证标准。该标准通过温湿度、堆码压力、振动、冲击等测试模块,…...

Perplexity奖学金搜索仅限前500名认证用户启用的“Priority Funding Mode”,你被系统自动降权了吗?
更多请点击: https://intelliparadigm.com 第一章:Perplexity奖学金搜索的机制演进与现状剖析 Perplexity 的奖学金搜索功能并非静态工具,而是随其核心检索架构的迭代持续演进。早期版本依赖关键词匹配与结构化数据库爬取,响应延…...

通过curl命令快速测试Taotoken接口连通性与模型响应效果
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令快速测试Taotoken接口连通性与模型响应效果 对于开发者而言,在集成大模型服务时,快速验证接口…...

AssetStudio深度解析:Unity资源二进制结构与离线反编译原理
1. 这不是“又一个Unity资源查看器”,而是一把能拆开Unity游戏包的手术刀AssetStudio这个名字,第一次见的人常误以为是Unity官方出的配套工具——毕竟带个“Studio”后缀,界面又长得挺像Unity编辑器。但其实它和Unity Technologies毫无关系&a…...

热门推荐:收藏!软件研发小白必看:AI转型从思维转变开始,轻松掌握大模型协作
本文探讨了软件研发团队如何进行AI转型,强调不应从购买工具或引入Agent开始,而是应首先关注个体思维的转变、团队知识底座的统一以及协作流程的重新设计。文章指出,开发者需要从关注代码实现转向关注编码前的设计、上下文组织和边界定义&…...

职场新人不会写自我介绍怎么办?AI三分钟帮你搞定,面试邀约直接翻倍!
嘿,各位刚踏入职场的小萌新、想跳槽但又苦于没新项目亮点的打工人!你是不是也遇到过这种尴尬:辛辛苦苦写完简历,最后却卡在“自我介绍”或者“个人总结”那块? 要么就是寥寥几句套话,像“本人性格开朗&…...

Claude CLI 缓存陷阱:为什么用第三方模型时 token 会暴涨 10 倍?
一个开发者的真实经历 上周,我收到一位朋友的微信: “我用 Claude Code 接 DeepSeek API,明明代码没怎么变,token 消耗却突然涨了好几倍,一天就把额度用完了。” 这个情况不是个例。在 GitHub 上,至少有 80 多个相关 issue,核心问题都指向同一个点——Claude CLI 默认…...