orin Ubuntu 20.04 配置 Realsense-ROS
librealsense安装
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
sudo apt-get install ros-noetic-ddynamic-reconfigure
二进制安装librealsense
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo bionic main" -u
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
拉取librealsense
git clone https://github.com/IntelRealSense/librealsense.git
//也可以指定版本
//git clone -b v2.50.0 https://github.com/IntelRealSense/librealsense.git
//sudo chmod u+x ./installLibrealsense.sh
//./installLibrealsense.sh
cd librealsense
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install
realsense-viewer
Cloning into ‘libcurl’…
error: RPC failed; HTTP 408 curl 22 The requested URL returned error: 408
fatal: the remote end hung up unexpectedly
直接去 https://github.com/curl/curl 下载curl.zip。
注释掉 ~/librealsense/CMake 文件下的 external_libcurl.cmake 的 GIT_REPOSITORY "git://github.com/curl/curl.git" 。即在 GIT_REPOSITORY "git://github.com/curl/curl.git"前加#。
并将提前下载后的 curl.zip 解压后 改名为 libcurl ,放入到 ~/librealsense/build/third-party。
由此可跳过git clone libcurl 失败的问题。
ROS包安装
cd ~/catkin_ws/src
git clone https://github.com/IntelRealSense/realsense-ros.git
git checkout ros1-legacy
git branch
cd ~/catkin_ws && catkin_make
roslaunch realsense2_camera demo_pointcloud.launch
roslaunch realsense2_camera rs_camera.launch
[ INFO] [1683620250.396558236]: Done Setting Dynamic reconfig parameters.
/opt/ros/noetic/lib/nodelet/nodelet: symbol lookup error: /home/bitcq/fast-drone-250/devel/lib//librealsense2_camera.so: undefined symbol: _ZN2cv3MatC1Ev
or
Could not find a package configuration file provided by “OpenCV“
未定义标识符undefined symbol: _ZN2cv3MatC1Ev。猜测是OpenCV库的问题,未找到链接库。
先在终端输入命令查找路径
locate OpenCVConfig.cmake
OpenCVConfig.cmake所在路径为/usr/lib/aarch64-linux-gnu/cmake/opencv4/OpenCVConfig.cmake
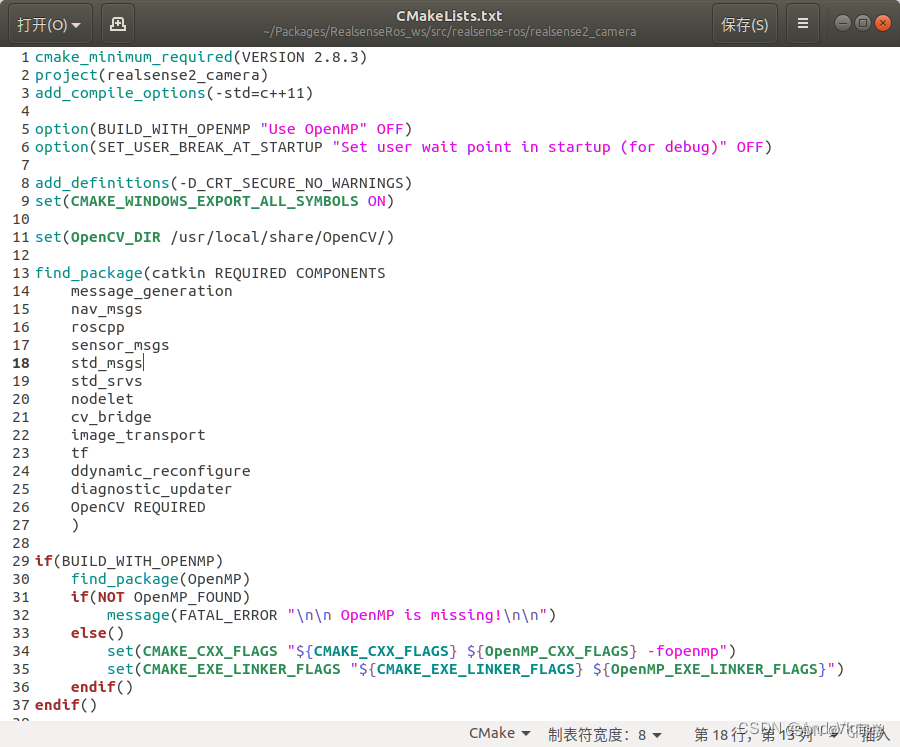
打开realsense-ros的功能包文件夹下 realsense2_camera 文件夹下的 CmakeLists.txt文件,做出如下修改:
添加
set(OpenCV_DIR /usr/lib/aarch64-linux-gnu/cmake/opencv4)到find_package前,添加OpenCV REQUIRED到find_package里
set(OpenCV_DIR /usr/lib/aarch64-linux-gnu/cmake/opencv4)
find_package(catkin REQUIRED COMPONENTSmessage_generationnav_msgsroscppsensor_msgsstd_msgsstd_srvsnodeletcv_bridgeimage_transporttfddynamic_reconfigurediagnostic_updaterOpenCV REQUIRED)
 添加${OpenCV_LIBS}到目标链接库里
添加${OpenCV_LIBS}到目标链接库里
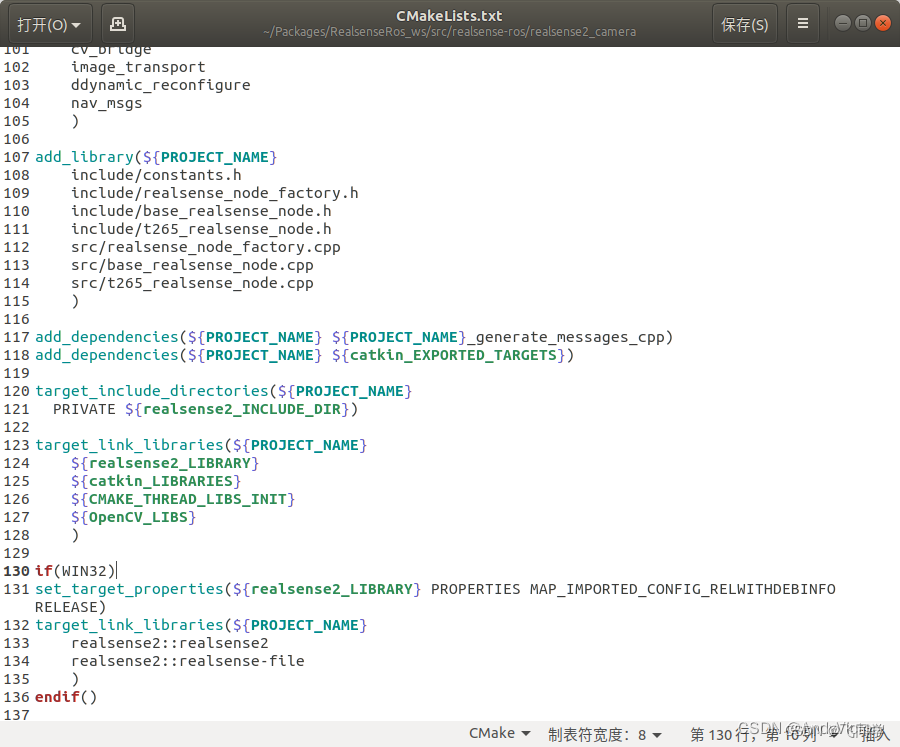
target_link_libraries(${PROJECT_NAME}${realsense2_LIBRARY}${catkin_LIBRARIES}${CMAKE_THREAD_LIBS_INIT}${OpenCV_LIBS})
[ WARN] [1683681450.133423931]: Hardware Notification:Depth stream start failure,1.68368e+12,Error,Hardware Error
将深度相机分辨率设置为与RGB相机相同即可
<arg name="depth_width" default="1280"/><arg name="depth_height" default="720"/><arg name="enable_depth" default="true"/>多主机ROS通信
export ROS_HOSTNAME=[master_host_ip]
export ROS_MASTER_URI=http://[host_ip]:11311
rgbd_launch是一组打开RGBD设备,并load 所有nodelets转化 raw depth/RGB/IR 流到深度图(depth image), 视差图(disparity image)和点云(point clouds)的launch文件集。
sudo apt-get install ros-noetic-rgbd-launch
相关文章:
orin Ubuntu 20.04 配置 Realsense-ROS
librealsense安装 sudo apt-get install libudev-dev pkg-config libgtk-3-dev sudo apt-get install libusb-1.0-0-dev pkg-config sudo apt-get install libglfw3-dev sudo apt-get install libssl-dev sudo apt-get install ros-noetic-ddynamic-reconfigure二进制安装libr…...

MyBatis基础知识点总结
MyBatis了解 MyBatis 是什么? MyBatis 是支持定制化 SQL、存储过程以及高级映射的优秀的持久层框架 MyBatis 避免了几乎所有的 JDBC 代码和手动设置参数以及获取结果集 MyBatis 可以使用简单的XML或注解用于配置和原始映射,将接口和Java的 POJO&#x…...
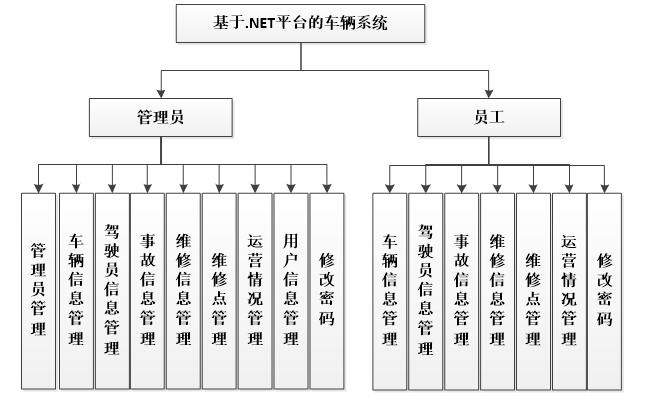
校园企业车辆维修报修管理系统设计与开发
本研究课题重点主要包括了下面几大模块:在本基于.net平台的车辆系统中分为管理员和用户2个模块,主要功能包括管理员信息管理,车辆信息管理,驾驶员信息管理,事故信息管理,维修信息管理,维修点管理…...
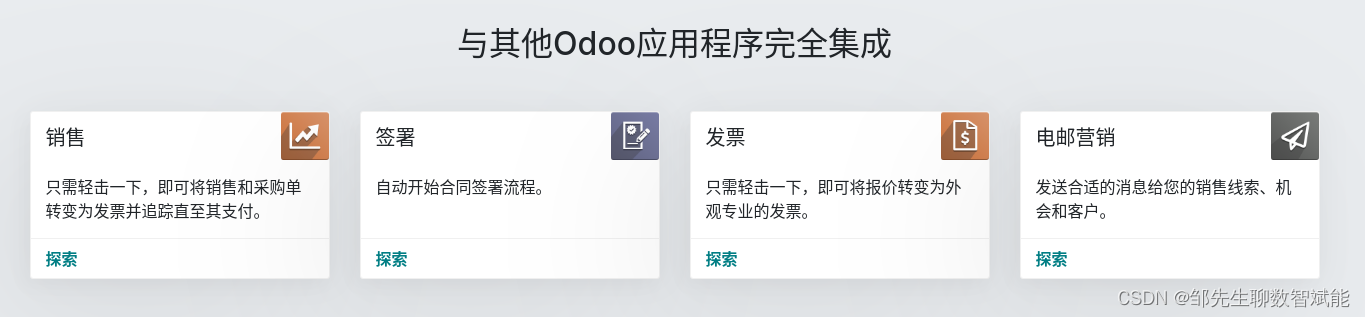
【企业信息化】第1集 免费开源ERP: Odoo 16 CRM客户关系管理系统
文章目录 前言一、概览二、使用功能1.加快销售速度2.销售线索3.机会4.客户5.高效沟通6.报告7.集成 三、总结 前言 世界排名第一的免费开源ERP: Odoo 16 CRM客户关系管理系统。真正以客户为中心的CRM。 一、概览 获得准确预测 使用可操作数据,以做出更好的决定。 获…...

Flink创建Hudi的Sink动态表
工厂类 HoodieTableFactory 提供的创建动态表接口 createDynamicTableSource 和 createDynamicTableSink,对应的源码文件为:https://github.com/apache/hudi/blob/master/hudi-flink-datasource/hudi-flink/src/main/java/org/apache/hudi/table/HoodieT…...

人脸识别技术的安全性及其应用探讨
随着科技的不断发展,人脸识别技术已经成为了一个热门话题。人脸识别系统的出现,给人们的生活带来了极大的便利,同时也为一些犯罪分子提供了方便。因此,人脸识别技术的安全性和可靠性一直备受关注。 一、人脸识别技术的原理 人脸识…...
老域名查询工具- 在线域名批量查询工具
域名批量查询工具 域名批量查询工具是一种帮助用户快速查询多个域名信息的工具,通常能够自动扫描一组域名的WHOIS信息、DNS、IP地址、服务器等各种信息,并提供快速的结果反馈。 以下是域名批量查询工具主要的优点: 提高工作效率:…...
JimuReport - 积木报表(一款免费Web报表工具)
一款免费的数据可视化报表,含报表和大屏设计,像搭建积木一样在线设计报表!功能涵盖,数据报表、打印设计、图表报表、大屏设计等! Web 版报表设计器,类似于excel操作风格,通过拖拽完成报表设计。…...
01-数据操作+数据预处理
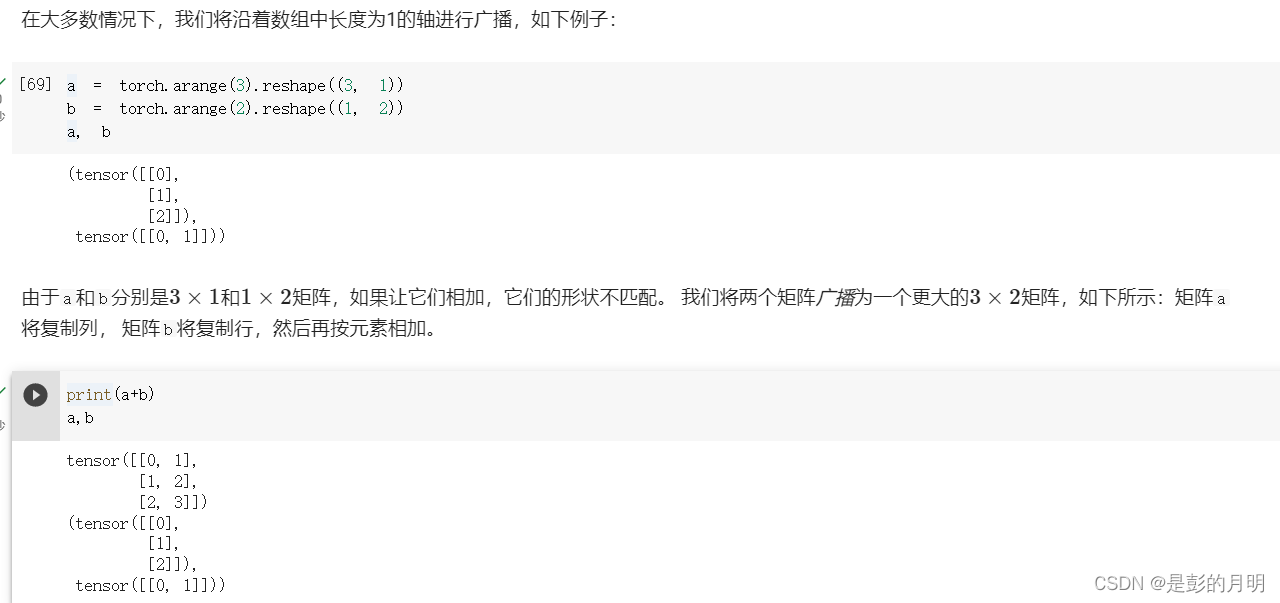
1.n维数组,也称为张量(tensor):tensor和ndarray没有本质区别。tensor是有数学上的严格定义,ndarray是计算机描述的;张量表示一个由数值组成的数组,这个数组可能有多个维度; 无论使用…...

macOS本地python环境/vscode/导入python包/设置python解释器
查看macbook本地是否有python环境 输入python或者python3,退出python环境使用exit(),别忘了括号 没有的话去官网安装https://www.python.org/ 2. 安装vscode 官网https://code.visualstudio.com/ 3. 安装插件 点击左边的“插件”按钮,安装…...

【转存】Go语言设计模式
导语| 设计模式是针对软件设计中常见问题的工具箱,其中的工具就是各种经过实践验证的解决方案。即使你从未遇到过这些问题,了解模式仍然非常有用,因为它能指导你如何使用面向对象的设计原则来解决各种问题,提高开发效率࿰…...

第十一章 升级与定制
第十一章 升级与定制 一、 RPM 包安装操作 RPM(Redhat Packet Manager)。 ①安装 rpm –i rpm 文件名 (注:⑴常见用法:-ivh 参数显示安装过程和 hash 符#; ⑵覆盖安装:使用- -force 选项。…...

代码随想录算法训练营第二十二天|235. 二叉搜索树的最近公共祖先、701.二叉搜索树中的插入操作、450.删除二叉搜索树中的节点
目录 235. 二叉搜索树的最近公共祖先 1、递归实现 2、迭代法实现 701.二叉搜索树中的插入操作(递归实现) 450.删除二叉搜索树中的节点(递归实现) 235. 二叉搜索树的最近公共祖先 相对于 二叉树的最近公共祖先 本题就简单一些了…...

hbase表出现RIT删除方案
1.删除zookeeper中对应表注册信息 cd /opt/cloudera/parcels/CDH/lib/zookeeper/bin ./zkCli.sh -server node2:2181 --node2为仿真节点,生产需改 deleteall /hbase/table/表名 2.删除hdfs对应表数据 hadoop dfs -rm -r /hbase/data/default/表名 3.删除hbase:met…...
)
SQL学习(3)
SELECT 语句用于从表中选取数据。 SELECT 列名称 FROM 表名称 SELECT * FROM 表名称关键词 DISTINCT 用于返回唯一不同的值 SELECT DISTINCT 列名称 FROM 表名称WHERE 子句用于规定选择的标准 如需有条件地从表中选取数据,可将 WHERE 子句添加到 SELECT 语句。 S…...

连接型CRM助力医疗企业把“成本中心”变成“利润中心”
在市场竞争日益加剧的情形下,企业获客成本大幅上涨,存量客户的维护和开发开始被重视,售后服务部门的职责在企业中发挥的价值越来越大。因为企业售后服务不仅能帮助客户解决问题的部门,还是客户与企业沟通的桥梁,将客户…...

《Vue.js 设计与实现》—— 03 Vue.js 3 的设计思路
1. 声明式地描述 UI Vue.js 3 是一个声明式的 UI 框架,即用户在使用 Vue.js 3 开发页面时是声明式地描述 UI 的。 编写前端页面涉及的内容如下: DOM 元素:例如是 div 标签还是 a 标签属性:如 a 标签的 href 属性,再…...

2023年湖北省建设厅特种作业操作证报名条件是什么?
建筑施工特种作业人员是指在房屋建筑和市政工程施工活动中,从事可能对本人、他人及周围设备设施的安全造成重大危害作业的人员。建筑施工特种作业人员必须经建设主管部门考核合格,取得建筑施工特种作业人员操作资格证书(以下简称“资格证书”…...

Redis 进阶
🥲 🥸 🤌 🫀 🫁 🥷 🐻❄️🦤 🪶 🦭 🪲 🪳 🪰 🪱 🪴 🫐 🫒 🫑…...

伙伴匹配系统笔记---02
Java 8特性 1. stream / parallelStream 流失处理 2. Optional 可选类 一. 前端整合路由 1. 路由:vue 路由组件库地址:安装 | Vue Router (vuejs.org) 安装:yarn add vue-router@4 2. 整合路由: // 1. 定义路由组件. // 也可以从其他文件导入 const Home = { templ…...

从Office功能区的“局外人“到“掌控者“:Office RibbonX Editor深度指南
从Office功能区的"局外人"到"掌控者":Office RibbonX Editor深度指南 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/g…...

6款高效降AI率工具 改写实力出众
写论文时反复检测出的AI痕迹总让你提心吊胆?别担心,这里整理了6款真正好用的论文降AI率工具,堪称应对AI生成特征的“得力助手”。它们能有效识别并消除AI生成的痕迹,改写能力出众,帮你快速降低查重率,顺利通…...

HarmonyOS ArkTS DateUtil 日期增减与日历计算完整指南
文章目录 背景一、引言二、日期增减方法详解使用示例 三、日历计算方法详解四、Demo 演示:日期增减结果展示五、Demo 演示:月历视图完整实现六、日历视图关键点解析为什么要填充前置空格?getLastDayOfMonth 的实现技巧 七、小结 背景 近期发现…...

别再死记硬背了!用5个生活化比喻彻底搞懂Linux进程的fork、exec和wait
别再死记硬背了!用5个生活化比喻彻底搞懂Linux进程的fork、exec和wait想象你正在厨房准备一顿大餐。菜谱上写着"切菜"、"炒菜"、"装盘"等步骤,但突然发现需要同时处理多道菜品——这时候,你会本能地让家人分工…...

WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南
WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 魔兽争霸III作为经典即时战…...

Airtest Poco实战:5分钟搞定微信小程序自动化测试环境搭建与元素抓取
Airtest Poco实战:5分钟搞定微信小程序自动化测试环境搭建与元素抓取微信小程序作为轻量级应用的代表,已经渗透到电商、社交、工具等各个领域。随着小程序功能的日益复杂,自动化测试成为保障产品质量的重要手段。本文将带你快速搭建微信小程序…...

多智能体谈判系统:Agent 如何通过博弈达成最优交易价格?
多智能体谈判系统:Agent 如何通过博弈达成最优交易价格?关键词 多智能体系统、自动谈判、博弈论、纳什均衡、帕累托最优、双边/多边谈判、强化学习谈判、动态定价 摘要 想象一个没有人类中介的世界:电商平台上的智能客服自动和批发商砍价、供…...

DeepSeek模型微调全链路解析:从数据准备、LoRA配置到推理部署的7大关键步骤
更多请点击: https://intelliparadigm.com 第一章:DeepSeek模型微调全链路概览 DeepSeek系列大语言模型(如DeepSeek-V2、DeepSeek-Coder)凭借其开源特性、高性能推理能力与丰富的领域适配性,已成为工业界与学术界微调…...

3分钟掌握中兴光猫配置解密:ZET工具终极快速指南
3分钟掌握中兴光猫配置解密:ZET工具终极快速指南 【免费下载链接】ZET-Optical-Network-Terminal-Decoder 项目地址: https://gitcode.com/gh_mirrors/ze/ZET-Optical-Network-Terminal-Decoder 想要自由掌控家中网络却总被光猫配置限制?中兴光猫…...
虚拟显示器优化指南)
拒绝延迟与黑屏:向日葵控制端 局域网直连 P2P 穿透与无头服务器(Headless)虚拟显示器优化指南
拒绝延迟与黑屏:向日葵控制端 局域网直连 P2P 穿透与无头服务器(Headless)虚拟显示器优化指南 在远程开发、分布式部署及日常运维场景中,我们经常需要远程连接到公司的高配工作站、机房服务器或家中的调试开发机。 作为国内普及…...