yolo v8
这个系列代码被封装的非常的精致,对二次开发不太友好,虽然也还是可以做些调节
模型的导出
有三种方式试过,都可以导出onnx的模型
1. 用yolov8
源码来自:ultralytics\yolo\engine\exporter.py
(不固定尺寸)
yolo export model=path/to/best.pt format=onnx dynamic=True
2. 用yolov5 里 export.py
但是attempt_load_weights这一步,要用yolo v8
3. 直接用 torch
class Demo(nn.Module):def __init__(self, model=None):super(Demo, self).__init__()self.model = YOUR_PROCESS(model, 0, 255, False)def forward(self, img):return self.model(img)[0]from ultralytics.nn.tasks import attempt_load_weights
model = attempt_load_weights(weights, device=0, inplace=True, fuse=True)
model = Demo(model)
model.to(device).eval()
#......(过程省略)
torch.onnx.export(self.model, img, output_path, verbose=False, opset_version=11, input_names=['images'],output_names=['output'],dynamic_axes={'images': {0: 'batch', 2: 'height', 3: 'width'}})
- 这里的Demo和YOUR_PROCESS都需要基于
nn.Module,在YOUR_PROCESS用于包含一些模型额外的处理。- YOUR_PROCESS 中的内容,如果是用于前处理,记得不要进行梯度计算,并对运算过程和整个层做梯度忽略。如下:
with torch.no_grad():# 在这个代码块中执行的操作不会被记录用于自动求导output = model(input)
self.conv_xx.eval()
# 对于self.conv_xx层以及与其相关的层,将启用评估模式的行为
output = self.conv_xx(input)
- attempt_load_weights这一步,要用yolo v8的
multi-scale
def preprocess_batch(self, batch, imgsz_train, gs):"""Allows custom preprocessing model inputs and ground truths depending on task type."""sz = random.randrange(int(self.args.imgsz * 0.5), int(self.args.imgsz * 1.5) + self.gs) // self.gs * self.gs # sizesf = sz / max(batch['img'].shape[2:]) # scale factorif sf != 1:ns = [math.ceil(x * sf / self.gs) * self.gs for x in batch['img'].shape[2:]] # new shape (stretched to gs-multiple)batch['img'] = batch['img'].to(self.device, non_blocking=True).float() / 255batch['img'] = nn.functional.interpolate(batch['img'], size=ns, mode='bilinear', align_corners=False)return batch
Loss
Yolo V8 只有两个 loss, 因为是anchor-free 了,所以不需要objective loss, 直接看分类和预测出来的框的两个内容。
-
Yolo v5 使用 CIOU 去算的loss, 而 Yolo v8 加入了更符合anchor-free的 loss 。所以这一步,用了两个loss一起帮助优化IOU。
CIOU loss + DFL来自Generalized focal loss: Learning qualified and distributed bounding boxes for dense object detection这篇论文(DFL论文)- VFL 在 yolo v8中也implement了,但是没有用上,这个loss 也是针对 anchor-free 的, 来自arifocalNet: An IoU-aware Dense Object Detector这篇论文(VFL论文)。
-
对分类loss, yolo v5 使用Focal loss(由BCE为基础), Yolo v8 沿用
BCEWithLogitsLoss
# cls loss
# loss[1] = self.varifocal_loss(pred_scores, target_scores, target_labels) / target_scores_sum # VFL wayloss[1] = self.bce(pred_scores, target_scores.to(dtype)).sum() / target_scores_sum # BCE# bbox lossif fg_mask.sum():loss[0], loss[2] = self.bbox_loss(pred_distri, pred_bboxes, anchor_points, target_bboxes, target_scores,target_scores_sum, fg_mask)loss[0] *= self.hyp.box # box gainloss[1] *= self.hyp.cls # cls gainloss[2] *= self.hyp.dfl # dfl gainreturn loss.sum() * batch_size, loss.detach() # loss(box, cls, dfl)
VFL
class VarifocalLoss(nn.Module):"""Varifocal loss by Zhang et al. https://arxiv.org/abs/2008.13367."""def __init__(self):"""Initialize the VarifocalLoss class."""super().__init__()def forward(self, pred_score, gt_score, label, alpha=0.75, gamma=2.0):"""Computes varfocal loss."""weight = alpha * pred_score.sigmoid().pow(gamma) * (1 - label) + gt_score * labelwith torch.cuda.amp.autocast(enabled=False):loss = (F.binary_cross_entropy_with_logits(pred_score.float(), gt_score.float(), reduction='none') *weight).sum()return loss
DFL
(感谢大白话 Generalized Focal Loss)
DFL 来自于GFL (Generalised focal loss)
GFL 主要解决了两个大的问题:
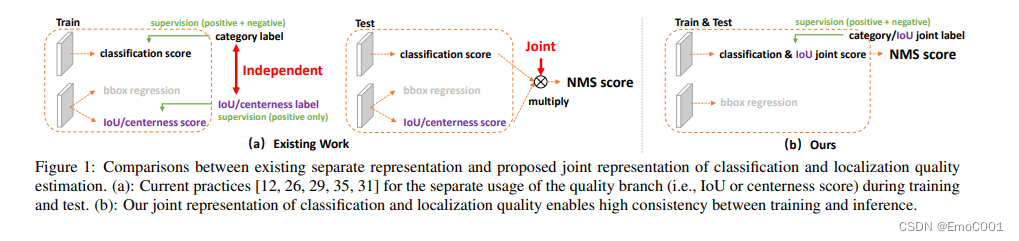
- classification score 和 IoU/centerness score 训练测试不一致
- bbox regression 采用的表示不够灵活,没有办法建模复杂场景下的uncertainty
class BboxLoss(nn.Module):def __init__(self, reg_max, use_dfl=False):"""Initialize the BboxLoss module with regularization maximum and DFL settings."""super().__init__()self.reg_max = reg_maxself.use_dfl = use_dfldef forward(self, pred_dist, pred_bboxes, anchor_points, target_bboxes, target_scores, target_scores_sum, fg_mask):"""IoU loss."""weight = torch.masked_select(target_scores.sum(-1), fg_mask).unsqueeze(-1)iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum# DFL lossif self.use_dfl:target_ltrb = bbox2dist(anchor_points, target_bboxes, self.reg_max)loss_dfl = self._df_loss(pred_dist[fg_mask].view(-1, self.reg_max + 1), target_ltrb[fg_mask]) * weightloss_dfl = loss_dfl.sum() / target_scores_sumelse:loss_dfl = torch.tensor(0.0).to(pred_dist.device)return loss_iou, loss_dfl@staticmethoddef _df_loss(pred_dist, target):"""Return sum of left and right DFL losses."""# Distribution Focal Loss (DFL) proposed in Generalized Focal Loss https://ieeexplore.ieee.org/document/9792391tl = target.long() # target lefttr = tl + 1 # target rightwl = tr - target # weight leftwr = 1 - wl # weight rightreturn (F.cross_entropy(pred_dist, tl.view(-1), reduction='none').view(tl.shape) * wl +F.cross_entropy(pred_dist, tr.view(-1), reduction='none').view(tl.shape) * wr).mean(-1, keepdim=True)
问题1
不一致有两方面:
方面1 分类,objective 和 IOU 都是各自训练自己的这部分,比如Fcos(论文里提到). 查看了Fcos 的loss 计算,看到和YOLO的方式类似。

以上的loss 计算,在GFL一文中,作者不认可,他认为这个不够End-to-End
方面2 归功于focal loss,分类的计算,能帮助平衡样本类别imbalance的情况。但是IOU的计算这里,没有考虑到样本imbalance的情况。如果将不公平的IOU分数乘上还算公平的分类分数,那么可能导致这个结果有水分(因为我们希望IOU和分类都够好的,排到前面,作为正样本)。
问题2
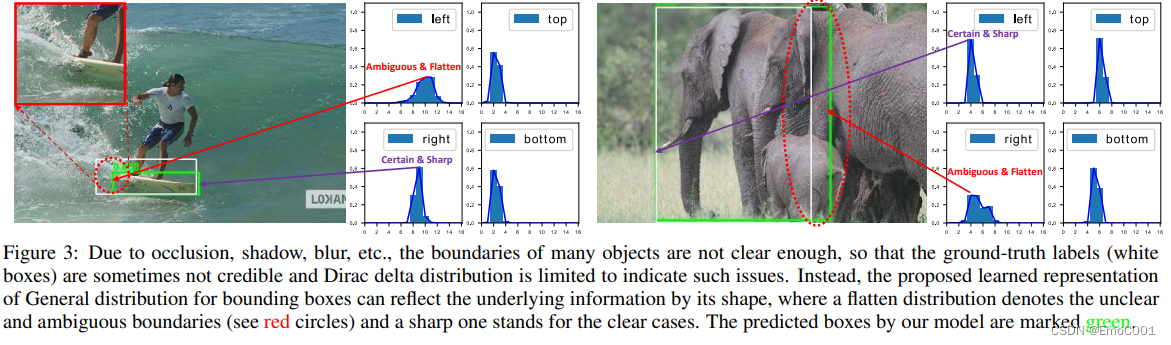
作者认为对于训练中IOU形成的Dirac delta distribution 或者预先做Gaussian分布的假设不足以用于general purpose 的场景。所以作者提出的新distribution, 可以让分布有形状上的明显特征。
确定为锐利区域的是紫色箭头所指,模棱两可为平滑区域的为红色箭头所指。从图上看,当遇到模棱两可的情况时,predict 的结果离 ground truth 有点多。
问题1 solution
针对方面1的问题,在QFL中用了classification-IoU joint representation(作为NMS score,而不像之前的做法是把两者相乘)。针对方面2,将Focal loss 运用进了 loss 公式。
问题2 solution
第二个问题使用general 分布解决,虽然数据也会有正负样本imbalance问题,但我们做的是目标检测,只有是正样本的时候,我们才在意它的IOU,因此作者决定只考虑正样本的情况,所以DFL仅用了cross entropy。
它之所以也叫focal,应该是因为它通过增加两个y labels( y i y_i yi , y i + 1 y_{i+1} yi+1)的结果,来快速定位到正确的label y. y i < = y < = y i + 1 y_i <= y <= y_{i+1} yi<=y<=yi+1
Finally
总的来说,作者靠QFL & DFL 解决了以上所有问题。但是一直强调的GFL呢?
在论文中,作者将QFL 与 DFL 做了 unified, GFL 就融合QFL 与 DFL的思想:
https://crossminds.ai/video/generalized-focal-loss-learning-qualified-and-distributed-bounding-boxes-for-dense-object-detection-606fdcaef43a7f2f827bf6f1/
https://paperswithcode.com/method/generalized-focal-loss
https://github.com/implus/GFocal
https://zhuanlan.zhihu.com/p/147691786
OTA
Distillation
DAMO-YOLO 用了KD, yolo v6 用了 self-distillation.
https://www.youtube.com/watch?v=MvM9J1lj1a8
https://openaccess.thecvf.com/content_ICCV_2019/papers/Zhang_Be_Your_Own_Teacher_Improve_the_Performance_of_Convolutional_Neural_ICCV_2019_paper.pdf
https://crossminds.ai/video/generalized-focal-loss-learning-qualified-and-distributed-bounding-boxes-for-dense-object-detection-606fdcaef43a7f2f827bf6f1/
相关文章:
yolo v8
这个系列代码被封装的非常的精致,对二次开发不太友好,虽然也还是可以做些调节 模型的导出 有三种方式试过,都可以导出onnx的模型 1. 用yolov8 源码来自:ultralytics\yolo\engine\exporter.py (不固定尺寸) yolo export modelpa…...
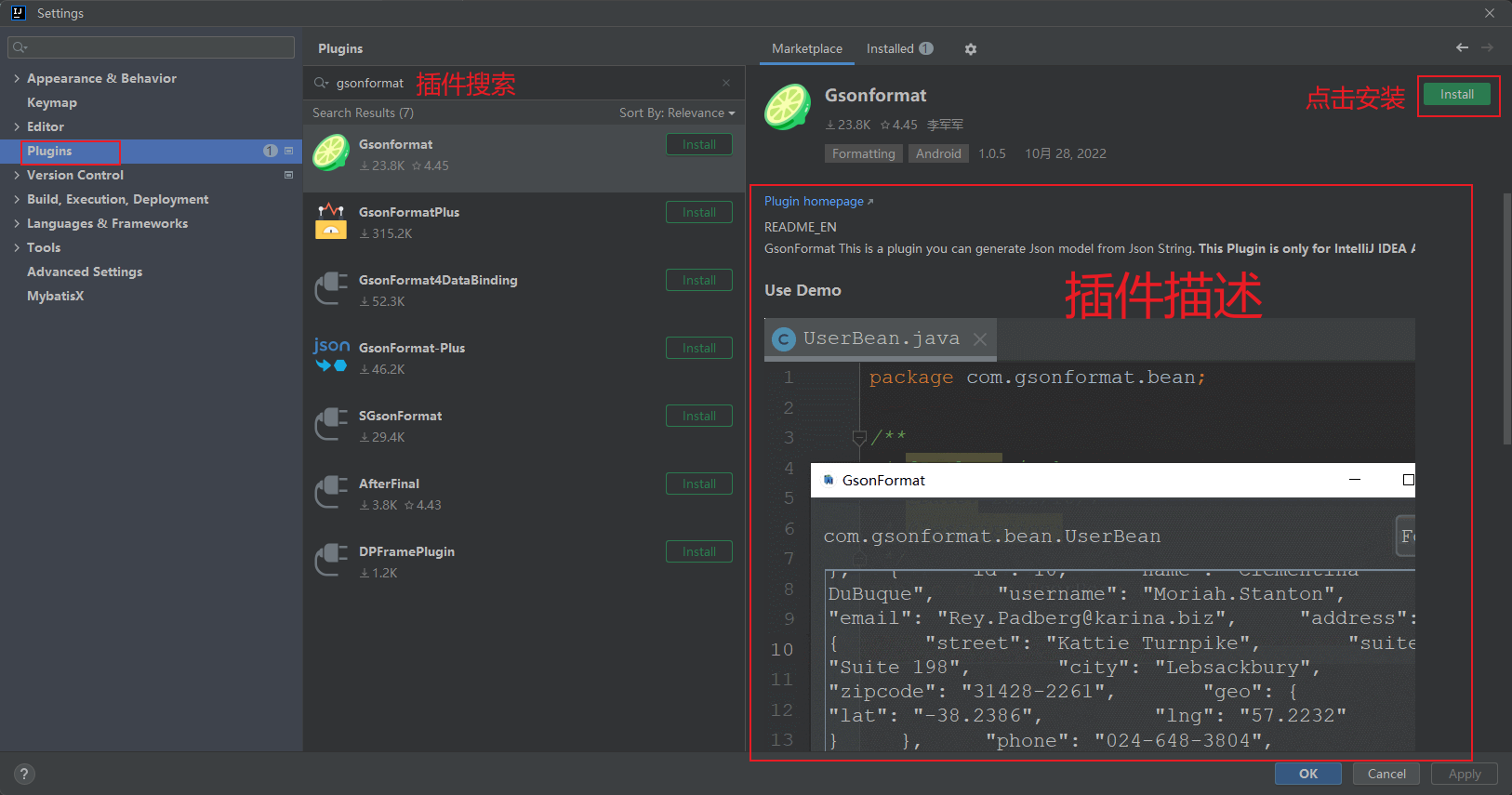
2022IDEA的下载、安装、配置与使用
文章目录 1.IntelliJ IDEA 介绍1.2 JetBrains 公司介绍1.2 IntelliJ IDEA 介绍1.3 IDEA 的主要功能介绍1.3.1 语言支持上1.3.2 其他支持 1.4 IDEA 的主要优势:(相较于 Eclipse 而言)1.5 IDEA 的下载地址1.6 官网提供的详细使用文档 2.windows 下安装过程2.1 安装前的…...

实验十 超市订单管理系统综合实验
实验十 超市订单管理系统综合实验 应粉丝要求,本博主帮助实现基本效果! 未避免产生版权问题,本项目博主不公开源码,如果您遇到相关问题可私聊博主! 一、实验目的及任务 通过该实验,掌握利用SSM框架进行系…...
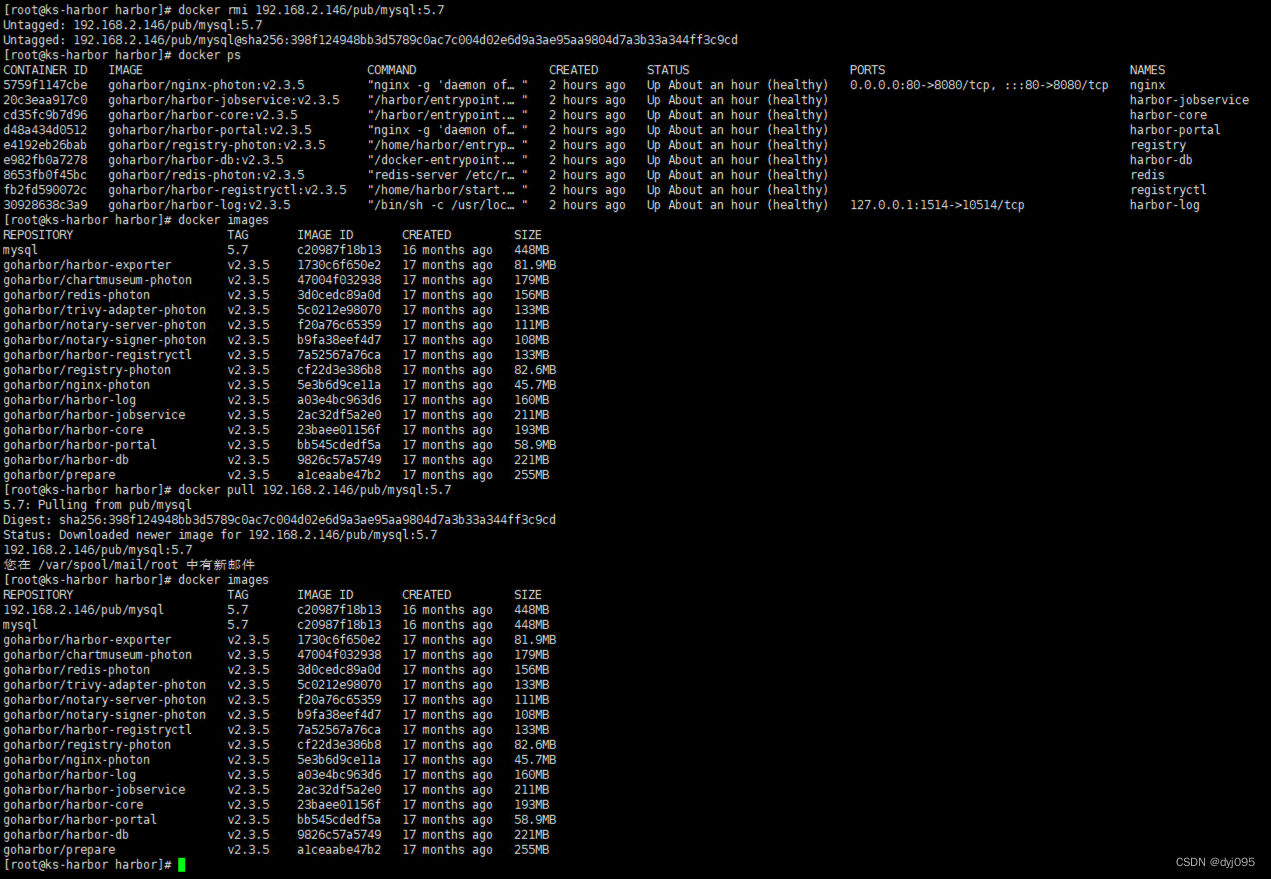
微服架构基础设施环境平台搭建 -(二)Docker私有仓库Harbor服务搭建
微服架构基础设施环境平台搭建 -(二)Docker私有仓库Harbor服务搭建 通过采用微服相关架构构建一套以KubernetesDocker为自动化运维基础平台,以微服务为服务中心,在此基础之上构建业务中台,并通过Jekins自动构建、编译、…...
springboot+freemarker+restful
什么是freemarker? FreeMarker是一种模板引擎,它可以用于生成各种类型的文档,比如HTML、XML、PDF、Word等。它可以通过简单的模板语法和数据模型来生成文档内容。与传统的JSP相比,FreeMarker的语法更加简洁和易读,并且可以很好地…...
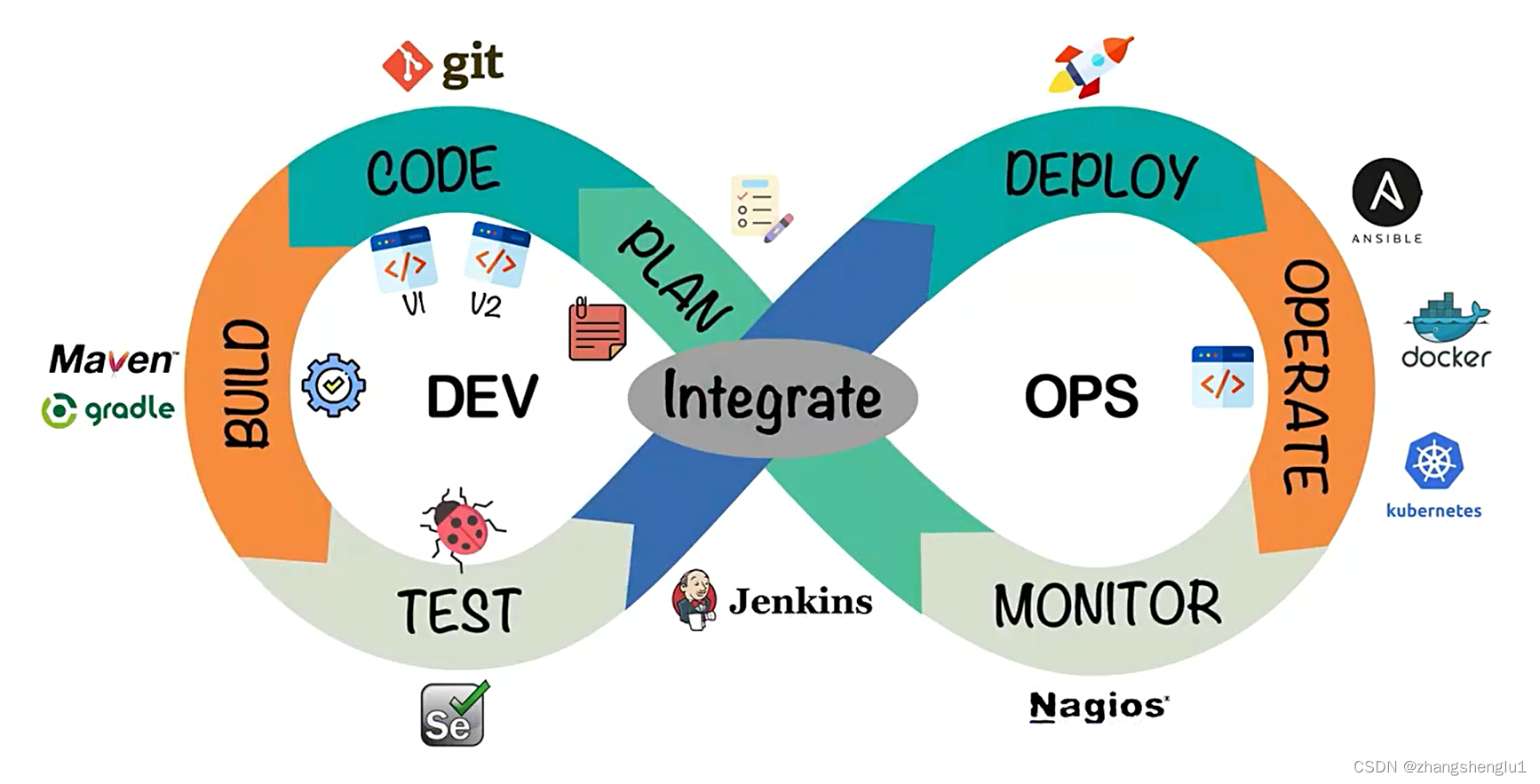
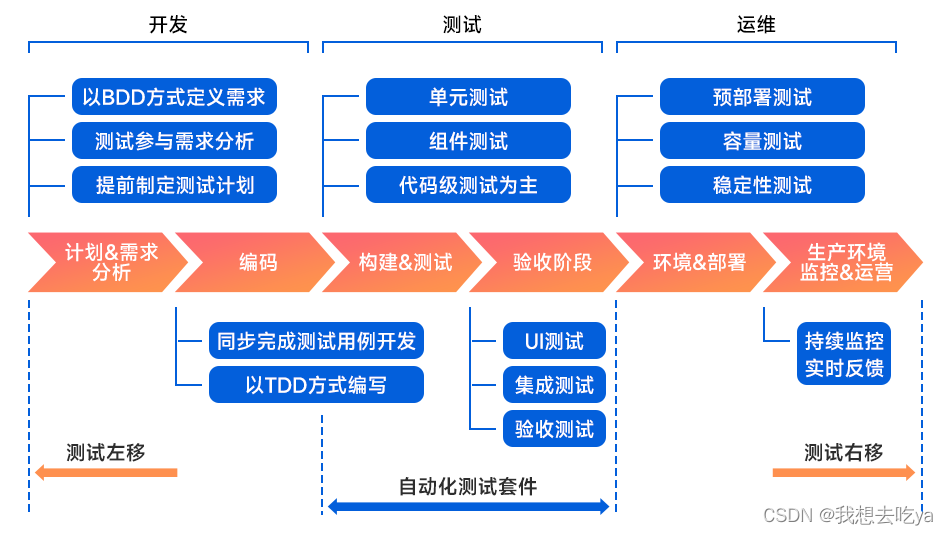
基于Kubernetes集群构建大中型企业CICD应用平台(1)-- devOps
一、DevOps介绍 软件开发最开始是由两个团队组成: 开发计划由开发团队从头开始设计和整体系统的构建。需要系统不停的迭代更新。 运维团队将开发团队的Code进行测试后部署上线。希望系统稳定安全运行。 这看似两个目标不同的团队需要协同完成一个软件的开发。 …...
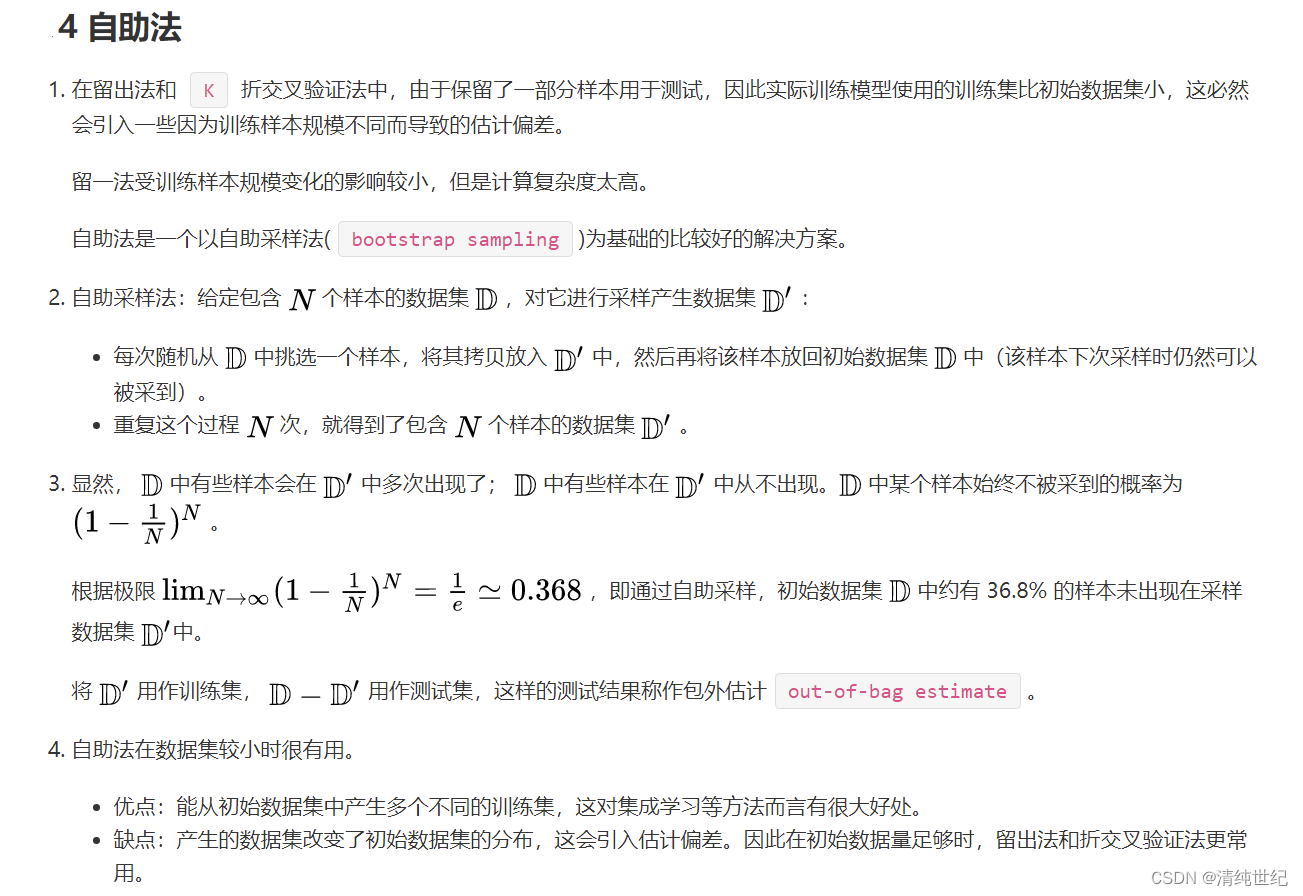
什么是模型鲁棒性和泛化能力
目录 1、鲁棒性 2、泛化能力 1、鲁棒性 定义:在统计学领域和机器学习领域,对异常值也能保持稳定、可靠的性质,称为鲁棒性。比如说,计算机软件在输入错误、磁盘故障、网络过载或有意攻击情况下,能否不死机、不崩溃&a…...
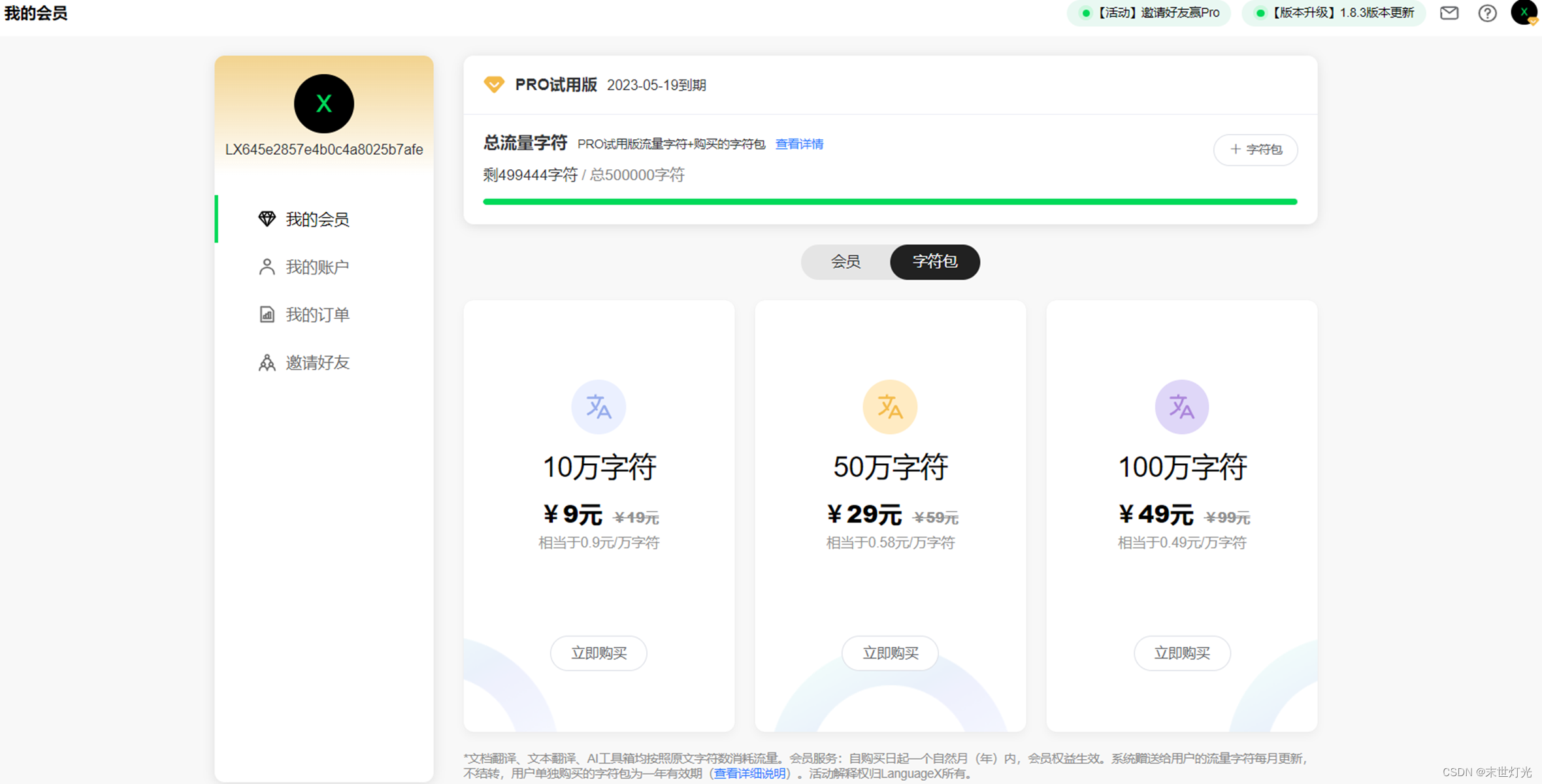
AI翻译工具分享
LanguageX简介 冠军翻译引擎交互式翻译,为专业译者而生的新一代译者工具 自2017年神经网络机器翻译流行以来,“机器翻译替代人工翻译”的观点屡见不鲜。作为一个技术和语言背景结合的团队,LanguageX认为语言服务是高度复杂、需要创意的智力活动,并肩负着人类沟通的重要使命。La…...

选男友最好的方式就是爬山
爬山,作为一种户外运动,一直备受青睐,拥有着许多的好处。而对于现代人来说,选择一位合适的伴侣,也是一件非常重要的事情。 那么,为什么不将两者结合起来,用爬山来寻找最合适的男友呢?…...
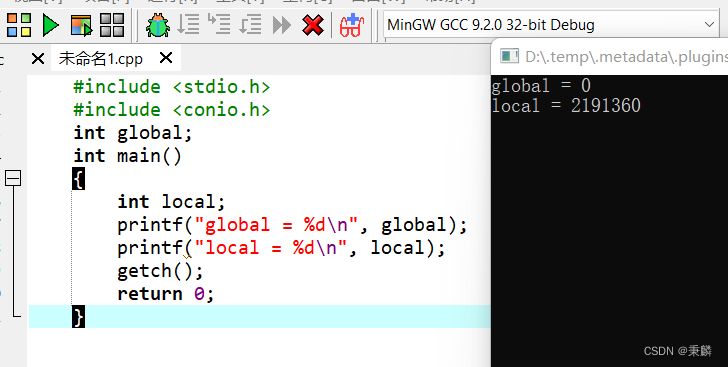
C++面经:初始化全局变量和未初始化全局变量有什么区别
全局变量初始化而且初始值不为0,那么这样的全局变量是放在内存的.data段的,如果全局变量初始值为0或者未初始化,那么这样的全局变量是放在.bss段的。 考点: 考察C/C语言内存模型,.data,.bss段存放的内容。 …...

vue-2 指令:
指令 什么是html属性:就是用来扩展html标签的功能,属性是写在html的开发标签中:属性“属性值”, 指令就是用来扩展在vue中标签的功能 {{}} :模板语法,文本插值 不可解析html标签 {{ 可以写变量&#x…...

非常提效的7款原型工具推荐
原型图工具允许在开发前进行测试和迭代过程,可以帮助节省大量的开发时间和成本。在本文中,我们盘点了7个易于使用的原型图工具,以提高您的生产力! 1.即时设计 即时设计是一款免费的在线 UI 设计工具,无系统限制&…...
)
最新Kafka和RabbitMQ消息队列经典面试题汇总(含答案)
最新Kafka和RabbitMQ消息队列经典面试题汇总 1.消息队列的应用场景有哪些?2.RabbitMQ 有哪些优点?3.RabbitMQ 有哪些重要的角色?4.RabbitMQ 有哪些重要的组件?它们有什么作用?5.什么是消息持久化?6.RabbitMQ 要实现消息持久化,需要满足哪些条件?7.消息持久化有哪些缺点…...
软件测试行业对新人友好吗?
软件测试真的算是对新人小白非常友好的学科了,但是你也千万不要抱有幻想,觉得轻轻松松就能掌握真正的技能,然后如愿找到高薪工作。从0到1还是需要一个过程的,也是需要你付出相当大的努力去学习的 随着人工智能时代的到来…...

Python requests 模块
Python中的requests模块是一个HTTP客户端库,它允许您向任何Web服务器发送HTTP请求并获取响应。 下面是一个简单的示例,向某个网站发送一个HTTP GET请求: python import requests response requests.get("http://www.example.com&quo…...

IOC理论推导
1.UserDao接口 package com.kuang.dao;public interface UserDao {void getUser(); }2.UserDaoImpl业务接口 package com.kuang.dao;public class UserDaoImpl implements UserDao{Overridepublic void getUser() {System.out.println("默认获取用户数据");} }3.Us…...

我的一些感悟
记录一些感悟,不定时更新 当面临稍微突发的情况时,感到慌乱;遭遇一点挫折时,情绪低落;面对问题,不是首先思考解决办法,而是抱怨不已。这种心态基本上无法取得成功 做事雷厉风行,需要…...
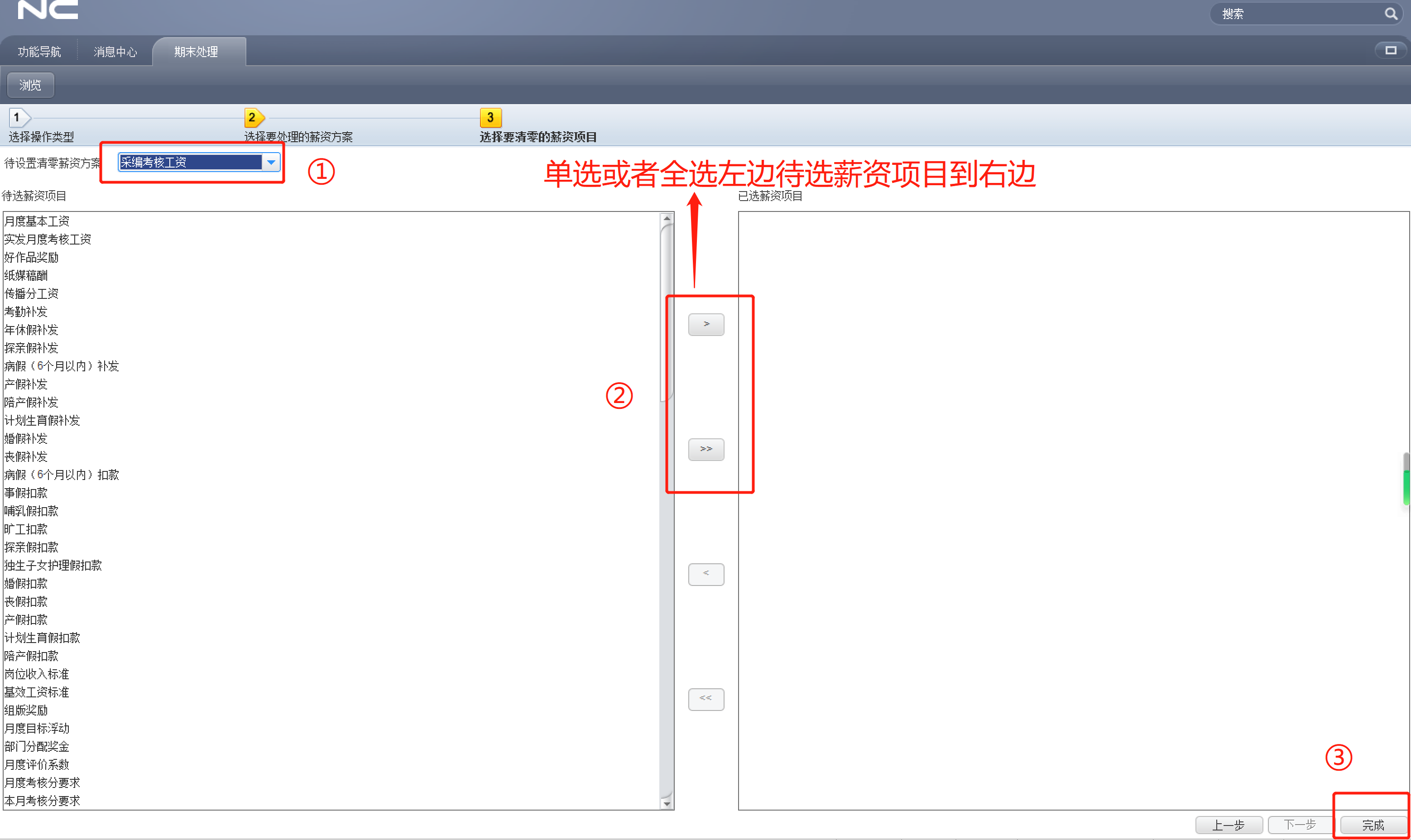
NC 人力薪酬管理怎么结账?
NC 人力薪酬管理结账流程 1、先在【薪资发放】节点选择相应的薪资方案进行查询操作,然后进行计算操作; 2、计算操作完后,再进行审核操作; 3、如果薪资方案勾选了“发放数据需要审批”属性,则需要在【发放申请】节点…...

JavaWeb编程面试题——Spring Boot
目录 引言一、面试题导航二、面试题目1.什么是SpringBoot?2.谈谈你对SpringBoot的理解?3.为什么需要SpringBoot?4.SpringBoot的配置文件有哪几种格式?5.SpringBoot支持哪些日志框架?推荐和默认的日志框架是哪个&#x…...
 A,B,C)
Educational Codeforces Round 148 (Rated for Div. 2) A,B,C
A. New Palindrome 要求:对于一个回文串,判断是否可以转换为其他回文串 思路:如果回文串的前一半存在不相同的字符,就可以转换 #include<bits/stdc.h> using namespace std;int n; string s;void solve(){cin>>s;boo…...

4大解决方案提升Blender项目质感:从资源获取到渲染优化的完整指南
4大解决方案提升Blender项目质感:从资源获取到渲染优化的完整指南 【免费下载链接】awesome-blender 🪐 A curated list of awesome Blender addons, tools, tutorials; and 3D resources for everyone. 项目地址: https://gitcode.com/GitHub_Trendin…...

乙巳马年春联生成终端效果展示:Ma Shan Zheng字体巨幅卷轴实拍
乙巳马年春联生成终端效果展示:Ma Shan Zheng字体巨幅卷轴实拍 1. 引言:一场数字时代的“开门见喜” 想象一下,你站在一扇威严的朱红大门前,门上是整齐排列的金色门钉,两侧是古老的门神画像。你只需轻声说出一个新年…...

Qwen2.5-VL视觉定位模型效果展示:一句话精准框出图中目标
Qwen2.5-VL视觉定位模型效果展示:一句话精准框出图中目标 1. 视觉定位技术的新突破 想象一下,你正在翻看手机相册寻找一张特定照片——"去年夏天在海边穿红色泳衣的那张"。传统相册需要你一张张翻看,而搭载Qwen2.5-VL视觉定位技术…...

Laf云平台终极灾备指南:如何实现多区域部署与智能故障转移
Laf云平台终极灾备指南:如何实现多区域部署与智能故障转移 【免费下载链接】laf labring/laf: 是一个用于 PHP 的轻量级 AJAX 库,可以方便地在 PHP 应用中实现 AJAX 通信。适合对 PHP、AJAX 库和想要实现 PHP AJAX 通信的开发者。 项目地址: https://g…...

【2.0 教程】第 7 章:仪表盘,一眼看全局
🎉NocoBase V2 系列教程已在官网-教程专栏发布,点击链接前往查看。 https://docs.nocobase.com/cn/tutorials/v2/ 已发布教程速览: NocoBase 2.0 入门教程 —— IT 工单系统 第一章:认识 NocoBase — 5 分钟跑起来 第二章&…...
`到生产级可观测性)
为什么你的LoRA微调总在step 217崩溃?Python大模型调试日志解密:从`torch._C._debug_dump_tracing_state()`到生产级可观测性
第一章:LoRA微调崩溃现象的系统性认知LoRA(Low-Rank Adaptation)作为一种高效参数微调技术,虽显著降低显存开销与训练成本,但在实际落地过程中频繁出现训练过程突然中断、梯度爆炸、loss突变为NaN或GPU内存溢出等“崩溃…...

Git内部原理浅析:对象、引用与分支合并策略
Git内部原理浅析:对象、引用与分支合并策略 在软件开发中,Git已成为版本控制系统的标准工具,但其强大的功能背后隐藏着精妙的设计原理。理解Git的内部机制,尤其是对象模型、引用系统以及分支合并策略,不仅能提升开发效…...
了!Python机器学习模型评估的5种实用方法对比)
别再只盯着model.score()了!Python机器学习模型评估的5种实用方法对比
超越model.score():Python机器学习模型评估的五大实战工具 当你的机器学习模型在测试集上表现不佳时,model.score()给出的单一数值往往无法揭示问题的全貌。就像医生不能仅凭体温判断病情一样,数据科学家也需要更丰富的诊断工具来全面评估模型…...
操作系统)
Linux(9)操作系统
linux 之 操作系统冯若依曼体系体系结构理解数据流动操作系统什么是操作系统??理解操作系统的调用系统调用的接口:冯若依曼体系 体系结构 要理解进程首先就需要了解操作系统!!! 五大组件: ○…...

augmentcode配置智谱、Deepseek、Minimax
Minimax 渠道名称:Minimax接口地址:https://api.minimaxi.com/anthropic/v1/chat/completionsToken:API Key模型:MiniMax-M2.7格式:默认格式 deepseek 渠道名称:deepseek接口地址:https://api.d…...