【MATLAB数据处理实用案例详解(22)】——基于BP神经网络的PID参数整定
目录
- 一、问题描述
- 二、算法仿真
- 2.1 BP_PID参数整定初始化
- 2.2 优化PID
- 2.3 绘制图像
- 三、运行结果
- 四、完整程序
一、问题描述
基于BP神经网络的PID控制的系统结构如下图所示:
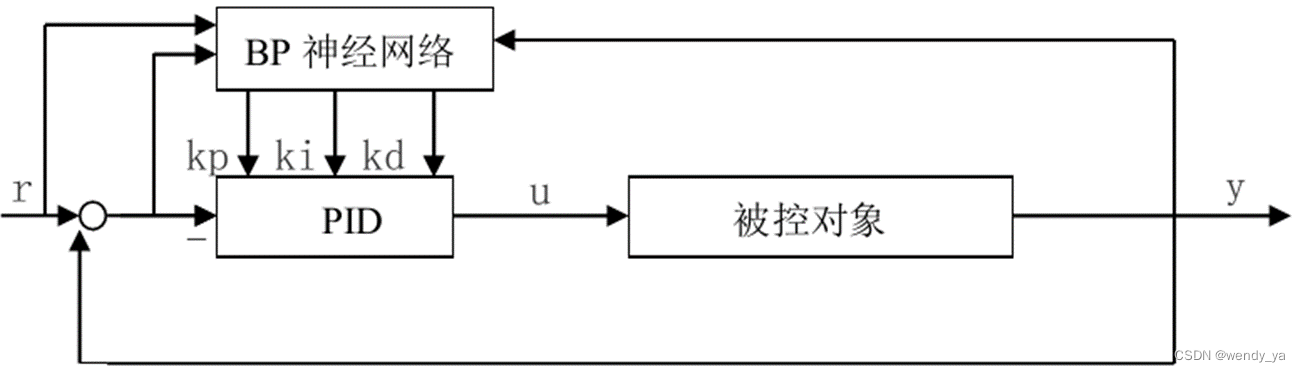
考虑仿真对象,输入为r(k)=1.0,输入层为4,隐藏层为5,输出层为3,仿真输出满足 a ( k ) = 1.2 ( 1 − 0.8 e x p ( − 0.1 k ) ) , y ( k ) = a ( k ) y − 1 1 + ( y − 1 ) 2 + u − 1 a(k)=1.2(1-0.8exp(-0.1k)),y(k)=a(k) \frac{y-1}{1+(y-1)^2}+u-1 a(k)=1.2(1−0.8exp(−0.1k)),y(k)=a(k)1+(y−1)2y−1+u−1,进行仿真分析。
二、算法仿真
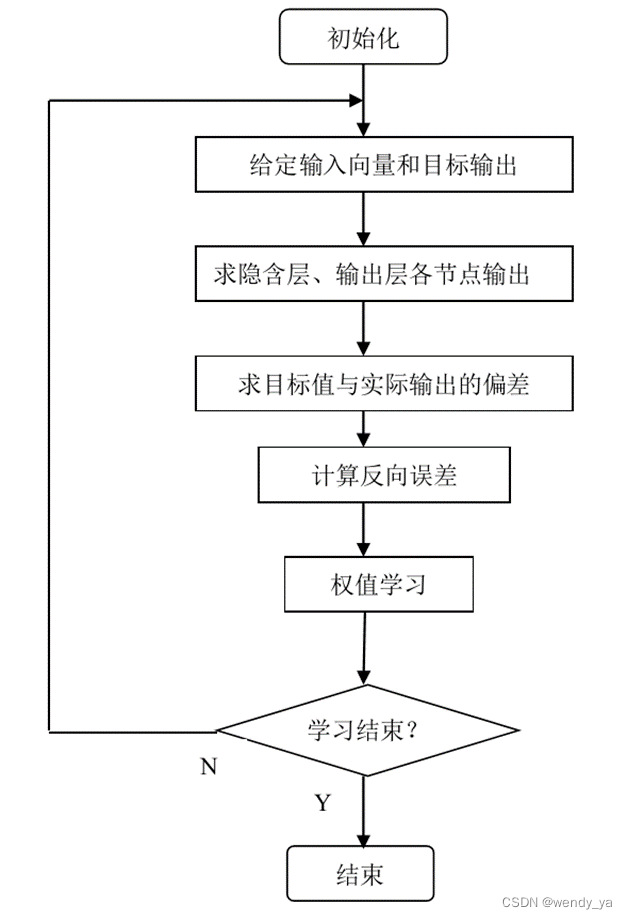
算法流程图如下:
2.1 BP_PID参数整定初始化
代码如下:
clc,clear,close all
warning off
xite=0.25; % 学习因子
alfa=0.05; % 惯量因子
S=1; %Signal type
%NN Structure
IN=4; % 输入层个数
H=5; % 隐藏层个数
Out=3; % 输出层个数
if S==1 %Step Signal
wi=[-0.6394 -0.2696 -0.3756 -0.7023;-0.8603 -0.2013 -0.5024 -0.2596;-1.0749 0.5543 -1.6820 -0.5437;-0.3625 -0.0724 -0.6463 -0.2859;0.1425 0.0279 -0.5406 -0.7660];
%wi=0.50*rands(H,IN);
wi_1=wi;wi_2=wi;wi_3=wi;
wo=[0.7576 0.2616 0.5820 -0.1416 -0.1325;-0.1146 0.2949 0.8352 0.2205 0.4508;0.7201 0.4566 0.7672 0.4962 0.3632];
%wo=0.50*rands(Out,H);
wo_1=wo;wo_2=wo;wo_3=wo;
endif S==2 %Sine Signal
wi=[-0.2846 0.2193 -0.5097 -1.0668;-0.7484 -0.1210 -0.4708 0.0988;-0.7176 0.8297 -1.6000 0.2049;-0.0858 0.1925 -0.6346 0.0347;0.4358 0.2369 -0.4564 -0.1324];
%wi=0.50*rands(H,IN);
wi_1=wi;wi_2=wi;wi_3=wi;
wo=[1.0438 0.5478 0.8682 0.1446 0.1537;0.1716 0.5811 1.1214 0.5067 0.7370;1.0063 0.7428 1.0534 0.7824 0.6494];
%wo=0.50*rands(Out,H);
wo_1=wo;wo_2=wo;wo_3=wo;
endx=[0,0,0];
u_1=0;u_2=0;u_3=0;u_4=0;u_5=0;
y_1=0;y_2=0;y_3=0;
% 初始化
Oh=zeros(H,1); %从隐藏层到输出层
I=Oh; %从输入层到隐藏层
error_2=0;
error_1=0;ts=0.001;
2.2 优化PID
2.3 绘制图像
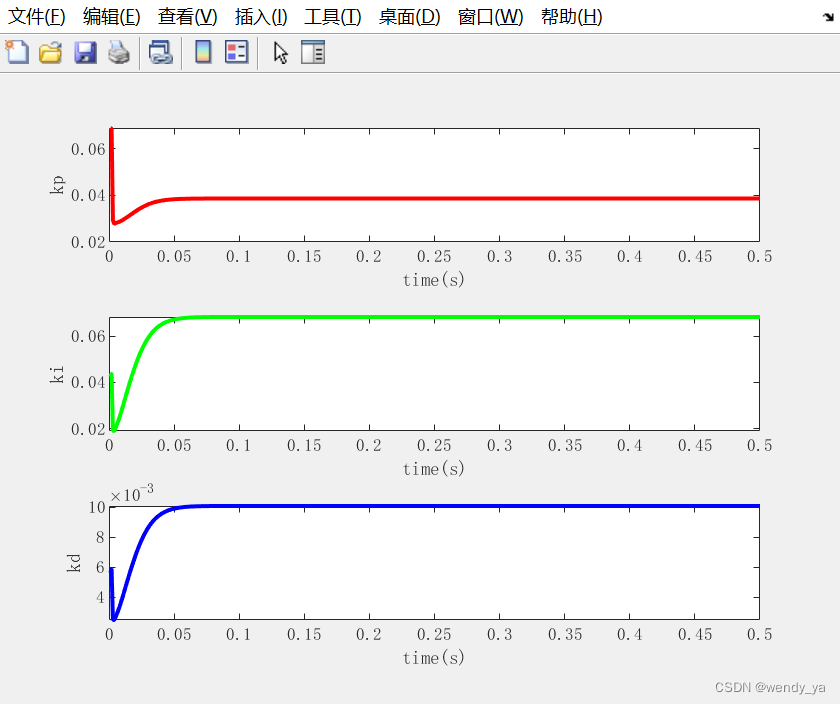
三、运行结果
PID三个参数变化值如下:
四、完整程序
完整程序如下:
%BP based PID Control
clc,clear,close all
warning off
xite=0.25; % 学习因子
alfa=0.05; % 惯量因子
S=1; %Signal type
%NN Structure
IN=4; % 输入层个数
H=5; % 隐藏层个数
Out=3; % 输出层个数
if S==1 %Step Signal
wi=[-0.6394 -0.2696 -0.3756 -0.7023;-0.8603 -0.2013 -0.5024 -0.2596;-1.0749 0.5543 -1.6820 -0.5437;-0.3625 -0.0724 -0.6463 -0.2859;0.1425 0.0279 -0.5406 -0.7660];
%wi=0.50*rands(H,IN);
wi_1=wi;wi_2=wi;wi_3=wi;
wo=[0.7576 0.2616 0.5820 -0.1416 -0.1325;-0.1146 0.2949 0.8352 0.2205 0.4508;0.7201 0.4566 0.7672 0.4962 0.3632];
%wo=0.50*rands(Out,H);
wo_1=wo;wo_2=wo;wo_3=wo;
endif S==2 %Sine Signal
wi=[-0.2846 0.2193 -0.5097 -1.0668;-0.7484 -0.1210 -0.4708 0.0988;-0.7176 0.8297 -1.6000 0.2049;-0.0858 0.1925 -0.6346 0.0347;0.4358 0.2369 -0.4564 -0.1324];
%wi=0.50*rands(H,IN);
wi_1=wi;wi_2=wi;wi_3=wi;
wo=[1.0438 0.5478 0.8682 0.1446 0.1537;0.1716 0.5811 1.1214 0.5067 0.7370;1.0063 0.7428 1.0534 0.7824 0.6494];
%wo=0.50*rands(Out,H);
wo_1=wo;wo_2=wo;wo_3=wo;
endx=[0,0,0];
u_1=0;u_2=0;u_3=0;u_4=0;u_5=0;
y_1=0;y_2=0;y_3=0;
% 初始化
Oh=zeros(H,1); %从隐藏层到输出层
I=Oh; %从输入层到隐藏层
error_2=0;
error_1=0;ts=0.001;
for k=1:1:500
time(k)=k*ts;
if S==1rin(k)=1.0;
elseif S==2rin(k)=sin(1*2*pi*k*ts);
end
%非线性模型
a(k)=1.2*(1-0.8*exp(-0.1*k));
yout(k)=a(k)*y_1/(1+y_1^2)+u_1; % 输出error(k)=rin(k)-yout(k); % 误差
xi=[rin(k),yout(k),error(k),1];x(1)=error(k)-error_1;
x(2)=error(k);
x(3)=error(k)-2*error_1+error_2;epid=[x(1);x(2);x(3)];
I=xi*wi';
for j=1:1:HOh(j)=(exp(I(j))-exp(-I(j)))/(exp(I(j))+exp(-I(j))); %Middle Layer
end
K=wo*Oh; %Output Layer
for l=1:1:OutK(l)=exp(K(l))/(exp(K(l))+exp(-K(l))); %Getting kp,ki,kd
end
kp(k)=K(1);ki(k)=K(2);kd(k)=K(3);
Kpid=[kp(k),ki(k),kd(k)];du(k)=Kpid*epid;
u(k)=u_1+du(k);
% 饱和限制
if u(k)>=10u(k)=10;
end
if u(k)<=-10u(k)=-10;
enddyu(k)=sign((yout(k)-y_1)/(u(k)-u_1+0.0000001));%Output layer
for j=1:1:OutdK(j)=2/(exp(K(j))+exp(-K(j)))^2;
end
for l=1:1:Outdelta3(l)=error(k)*dyu(k)*epid(l)*dK(l);
endfor l=1:1:Outfor i=1:1:Hd_wo=xite*delta3(l)*Oh(i)+alfa*(wo_1-wo_2);end
endwo=wo_1+d_wo+alfa*(wo_1-wo_2);
%Hidden layer
for i=1:1:HdO(i)=4/(exp(I(i))+exp(-I(i)))^2;
endsegma=delta3*wo;
for i=1:1:Hdelta2(i)=dO(i)*segma(i);
endd_wi=xite*delta2'*xi;
wi=wi_1+d_wi+alfa*(wi_1-wi_2);
% 参数更新
u_5=u_4;u_4=u_3;u_3=u_2;u_2=u_1;u_1=u(k);
y_2=y_1;y_1=yout(k);wo_3=wo_2;
wo_2=wo_1;
wo_1=wo;wi_3=wi_2;
wi_2=wi_1;
wi_1=wi;error_2=error_1;
error_1=error(k);
end
% 绘图
figure(1);
plot(time,rin,'r',time,yout,'b','linewidth',2);
xlabel('time(s)');ylabel('rin,yout'); % 输入和输出
figure(2);
plot(time,error,'r','linewidth',2);
xlabel('time(s)');ylabel('error'); % 误差
figure(3);
plot(time,u,'r','linewidth',2);
xlabel('time(s)');ylabel('u'); % 控制输出
figure(4);
subplot(311); % PID参数
plot(time,kp,'r','linewidth',2);
xlabel('time(s)');ylabel('kp');
subplot(312);
plot(time,ki,'g','linewidth',2);
xlabel('time(s)');ylabel('ki');
subplot(313);
plot(time,kd,'b','linewidth',2);
xlabel('time(s)');ylabel('kd');
ok,以上便是本文的全部内容了,如果对你有所帮助,记得点个赞哟~
相关文章:
【MATLAB数据处理实用案例详解(22)】——基于BP神经网络的PID参数整定
目录 一、问题描述二、算法仿真2.1 BP_PID参数整定初始化2.2 优化PID2.3 绘制图像 三、运行结果四、完整程序 一、问题描述 基于BP神经网络的PID控制的系统结构如下图所示: 考虑仿真对象,输入为r(k)1.0,输入层为4,隐藏层为5&…...

第11章 项目人力资源管理
文章目录 项目人力资源管理 过程11.2.1 编制项目人力资源计划的工具与技术(1)层次结构图(工作、组织、资源 分解结构)(2)矩阵图(责任分配矩阵,RAM)(3…...
07-Vue技术栈之(组件之间的通信方式)
目录 1、组件的自定义事件1.1 绑定自定义事件:1.1.1 第一种方式1.1.2 第二种方式1.1.3 自定义事件只触发一次 1.2 解绑自定义事件1.3绑定原生DOM事件1.4 总结 2、全局事件总线(GlobalEventBus)2.1 应用全局事件总线 3、 消息订阅与发布&#…...

度量学习Metirc Learning和基于负例的对比学习Contrastive Learning的异同点思考
参考:对比学习(Contrastive Learning):研究进展精要 - 知乎 参考:对比学习论文综述【论文精读】_哔哩哔哩_bilibili 参考:度量学习DML之Contrastive Loss及其变种_对比损失的变种_胖胖大海的博客-CSDN博客 参考&…...

3.编写油猴脚本之-helloword
3.编写油猴脚本之-helloword Start 通过上一篇文章的学习,我们安装完毕了油猴插件。今天我们来编写一个helloword的脚步,体验一下油猴。 1. 开始 点击油猴插件>添加新脚本 默认生成的脚本 // UserScript // name New Userscript // name…...

openwrt的openclash提示【更新失败,请确认设备闪存空间足够后再试】
网上搜索了一下,问题应该是出在“无法从网络下载内核更新包”或者“无法识别内核的版本号” 解决办法:手动下载(我是只搞了DEV内核就搞定了TUN和Meta没有动) --> 上传到路由器上 --> 解压缩 --> 回到openclash界面更新配…...
torch.nn.Module
它是所有的神经网络的根父类! 你的神经网络必然要继承 可以看一下这篇文章...
论文解析-基于 Unity3D 游戏人工智能的研究与应用
1.重写 AgentAction 方法 1.1 重写 AgentAction 方法 这段代码是一个重写了 AgentAction 方法的方法。以下是对每行代码解释: ①public override void AgentAction(float[] vectorAction) 这行代码声明了一个公共的、重写了父类的 AgentAction 方法的方法。它接受…...
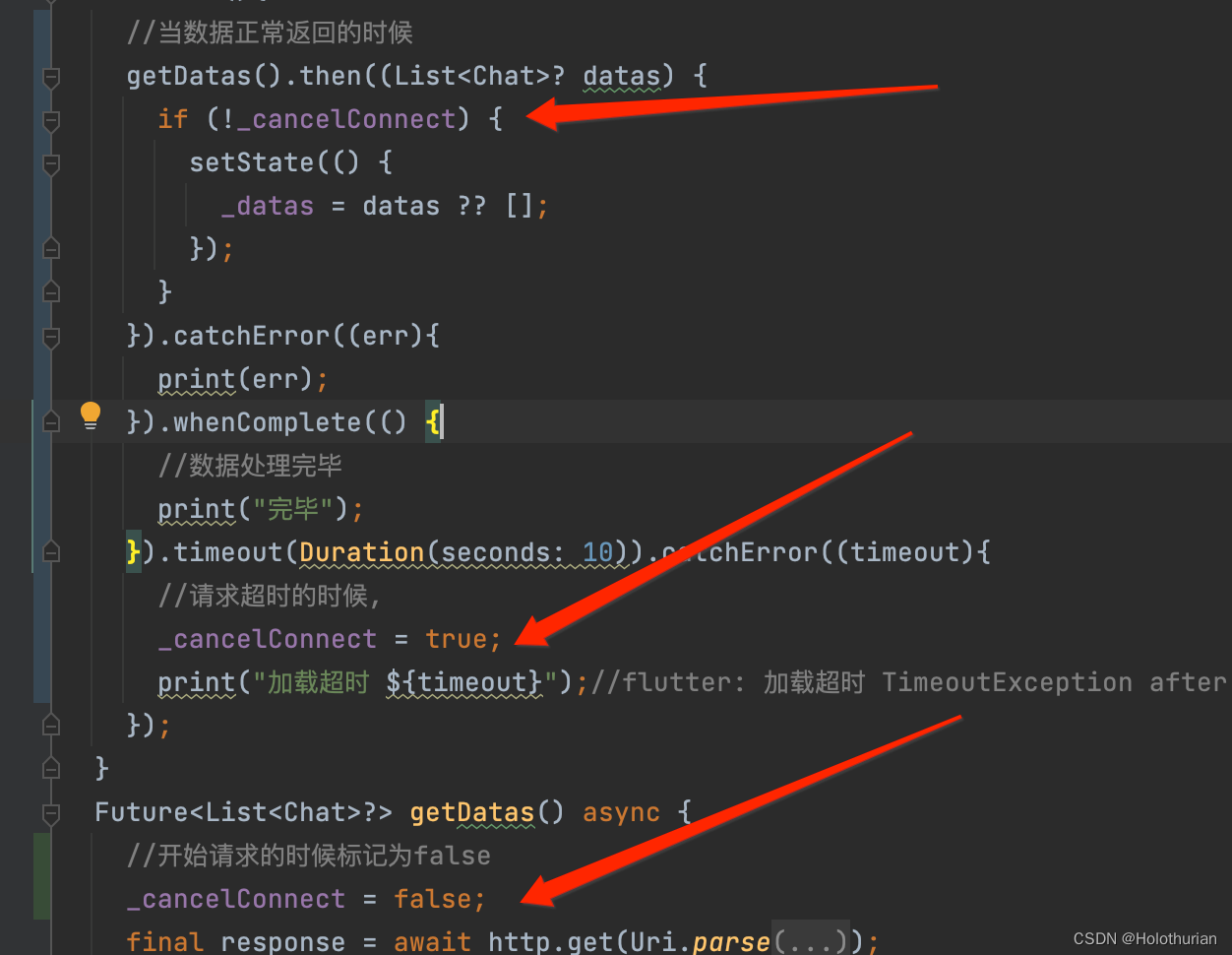
6、Flutterr聊天界面网络请求
一、准备网络数据 1.1 数据准备工作 来到网络数据制造的网址,注册登录后,新建仓库,名为WeChat_flutter;点击进入该仓库,删掉左侧的示例接口,新建接口. 3. 接着点击右上角‘编辑’按钮,新建响应内容,类型为Array,一次生成50条 4. 点击chat_list左侧添加按钮,新建chat_list中的…...

Java 8 腰斩!Java 17 暴涨 430%!!(文末福利)
New Relic 最新发布了一份 “2023 年 Java 生态系统状况报告”,旨在提供有关当今 Java 生态系统状态的背景和见解。该报告基于从数百万个提供性能数据的应用程序中收集的数据,对生产中使用最多的版本、最受欢迎的 JDK 供应商、容器的兴起等多方面进行了调…...

如何手写一个支持H.265的高清播放器
概述 音视频编解码技术在当前的互联网行业中十分热门,特别是高清视频播放器的开发,其中包括4K、8K等超高清分辨率的播放器,具有极高的市场需求和广泛的应用场景。H265编码技术更是实现高清视频压缩的重要手段之一。如果想要掌握音视频编解码…...

Day 1 认识软件测试——(软件测试定义、目的、原则)
Day 1 认识软件测试——(软件测试定义、目的、原则) 文章目录 Day 1 认识软件测试——(软件测试定义、目的、原则)软件测试的定义软件测试的目的软件测试的经济学问题黑盒测试白盒测试软件测试原则小结所谓软件测试,就是一个过程或一系列过程,用来确定计算机代码完成了其…...
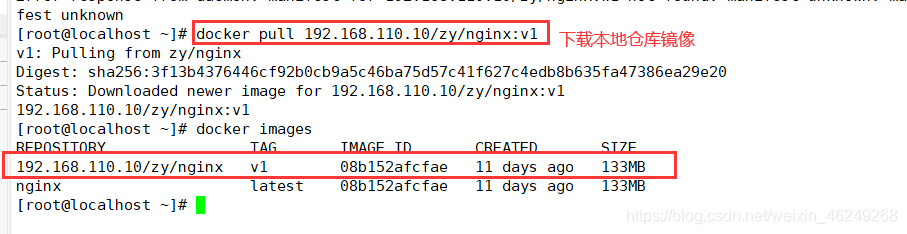
Docker Harbor
目录 一、Docker Harbor概述 1、Harbor的优势 2、Harbor知识点 3、Docker私有仓库架构 二、Harbor构建Docker私有仓库 1、环境配置 2、案例需求 3、部署docker-compose服务 4、部署harbor服务 5、启动harbor ① 访问 ② 添加项目并填写项目名称 ③ 通过127.0.0.1来…...

第三十四章 Unity人形动画(上)
在我们DirectX课程中,我们讲过一个模型最少拥有网格和材质,可以没有动画。游戏场景中的静态物体就可以是这样的模型,例如花草树木,建筑物等等,他们通过MeshRenderer就可以渲染。对于一个带有动画的FBX文件,…...

计算机图形学-GAMES101-7
引言 场景中有很多的三角形,如果实现可见性和遮挡呢? 一个简单的想法是,从远到近画,近处的物体自然会覆盖掉远处的物体,这种画法也叫画家算法。 但是实际绘制中物体的顺序是不容易确定的,比如如下图绘制…...

AndroidAuto 解决PCTS NF7
直接上代码 public void handleNavigationFocusRequest(int focusType) {// Always grant requested focus in this example.-mGal.galReceiver.sendNavigationFocusState(focusType);+mGal.galReceiver.sendNavigationFocusState...
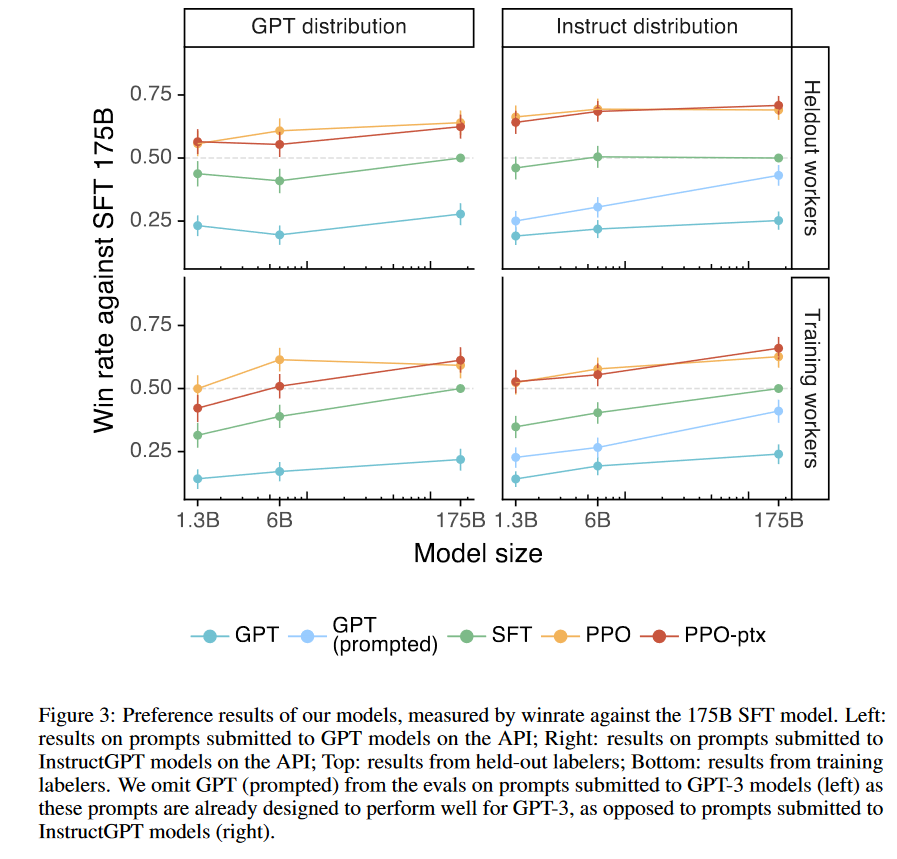
GPT:你知道这五年我怎么过的么?
时间轴 GPT 首先最初版的GPT,来源于论文Improving Language Understanding by Generative Pre-Training(翻译过来就是:使用通用的预训练来提升语言的理解能力)。GPT这个名字其实并没有在论文中提到过,后人将论文名最后…...
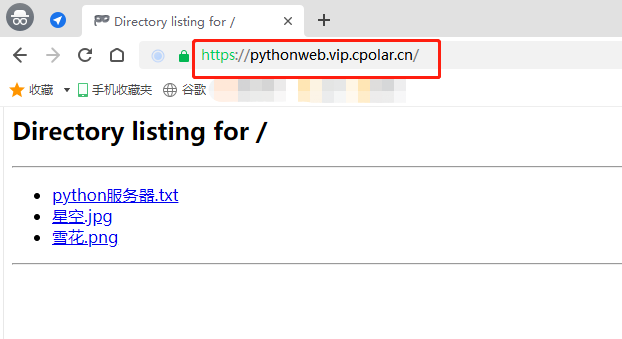
Python一行命令搭建HTTP服务器并外网访问 - 内网穿透
文章目录 1.前言2.本地http服务器搭建2.1.Python的安装和设置2.2.Python服务器设置和测试 3.cpolar的安装和注册3.1 Cpolar云端设置3.2 Cpolar本地设置 4.公网访问测试5.结语 转载自远程内网穿透的文章:【Python】快速简单搭建HTTP服务器并公网访问「cpolar内网穿透…...

TypeScript5-泛型
泛型是 TS 中一个重要的概念,它可以创建可复用的组件,同时保持对类型信息的一致性。 泛型提供了一种方式使得类型可以被参数化,这样就可以创建可以适用于各种数据类型的函数或类,而不仅仅限于一个数据类型。 一、泛型 先来看一…...
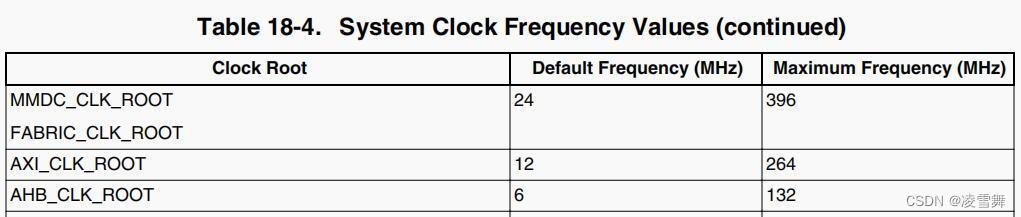
IMX6ULL裸机篇之DDR3的时钟配置
一. MMDC 控制器 对于 I.MX6U 来说,有 DDR 内存控制器,否则的话它怎么连接 DDR 呢?MMDC控制器 就是 I.MX6U 的 DDR内存控制器。 MMDC 外设包含一个内核(MMDC_CORE)和 PHY(MMDC_PHY),内核和 PHY 的功能如下: MMDC 内…...

汇川小型机 H5U编写程序 设备采用回转hu小型机编写程序不含的硬件配置有ECT的总线
汇川小型机 H5U编写程序 设备采用回转hu小型机编写程序不含的硬件配置有ECT的总线,包括汇川660系列伺服驱动器以及Io模块。 设备程序分段明确采用梯形图编写更加方便,直观,易懂各个伺服轴密切配合,实现收放卷pid调节,以…...

手机拍照更快了?聊聊MIPI CSI-2的LRTE技术如何优化图像传感器数据传输
手机拍照更快了?揭秘MIPI CSI-2的LRTE技术如何重塑图像传输效率 按下快门的那一刻,你是否曾因手机短暂的"卡顿"而错过精彩瞬间?这背后隐藏着图像传感器与处理器之间数据传输的效率瓶颈。MIPI联盟推出的CSI-2协议最新特性——延迟减…...

Streamlit像素UI深度优化教程:解决Ostrakon-VL终端文字遮挡问题
Streamlit像素UI深度优化教程:解决Ostrakon-VL终端文字遮挡问题 1. 项目背景与问题分析 在开发Ostrakon-VL零售扫描终端时,我们选择了一种独特的像素艺术风格UI设计。这种高饱和度的8-bit复古游戏美学虽然提升了用户体验的趣味性,但也带来了…...

保姆级教程:在Windows上用Python 3.10.7一键部署SenseVoice语音识别API
Windows平台Python 3.10.7环境下的SenseVoice语音识别API全流程部署指南 语音识别技术正在改变我们与设备交互的方式。对于开发者而言,快速搭建一个可靠的语音识别服务是许多AI应用开发的第一步。SenseVoice作为开源的语音识别解决方案,以其轻量级和易用…...

Windows/Mac双平台实测:FORCE PRO 6.3.0求解器从注册到下载的完整配置流程
Windows/Mac双平台实测:FORCE PRO 6.3.0求解器从注册到下载的完整配置流程 在工程优化与控制领域,FORCE PRO求解器凭借其高效的数值计算能力和灵活的接口设计,已成为众多开发者的首选工具。最新发布的6.3.0版本在算法效率和平台兼容性上都有…...

探索光的世界:Ray Optics Simulation 几何光学仿真平台深度解析
探索光的世界:Ray Optics Simulation 几何光学仿真平台深度解析 【免费下载链接】ray-optics A web app for creating and simulating 2D geometric optical scenes, with a gallery of (interactive) demos. 项目地址: https://gitcode.com/gh_mirrors/ra/ray-op…...

AI辅助开发智能车:让快马平台优化你的图像处理与识别算法
最近在准备智能车竞赛,遇到了一个头疼的问题:摄像头采集的图像受环境光影响太大,导致巡线识别不稳定。特别是在弯道和阴影区域,传统固定阈值的二值化方法完全失效。经过反复尝试,发现用InsCode(快马)平台的AI辅助开发功…...

实战应用:使用快马平台为vmware17部署生成企业级健康检查与配置方案
在实际的企业IT环境中,部署VMware vSphere 17(以下简称VMware 17)这类虚拟化平台往往不是简单的安装过程,而是需要综合考虑硬件兼容性、系统配置、安全策略等多方面因素。为了确保部署过程的顺利和后续运行的稳定,我们…...

Ostrakon-VL像素终端实战:为盲人顾客生成语音版货架导航
Ostrakon-VL像素终端实战:为盲人顾客生成语音版货架导航 1. 项目背景与价值 在零售场景中,视觉障碍顾客常常面临难以独立寻找商品的困境。传统解决方案依赖人工引导或专用盲道,成本高且灵活性不足。我们基于Ostrakon-VL-8B多模态大模型&…...

跨平台终端与进程控制:从原理到实践
跨平台终端与进程控制:从原理到实践 【免费下载链接】node-pty Fork pseudoterminals in Node.JS 项目地址: https://gitcode.com/gh_mirrors/no/node-pty 在现代软件开发中,终端交互和进程管理是不可或缺的核心能力。无论是构建IDE、开发自动化工…...