机器人科普--evoBOT
机器人科普--evoBOT
- 1 介绍
- 2 视频
- 3 Modular prototype
- 4 Mechanical construction
- 5 Hardware architecture and technology
- 6 Autonomy und navigation
- 7 Operation of the robot
- 8 Technical data
- 参考
1 介绍
The evolution of autonomous mobile robotic systems
2 视频
evoBOT®– Inventors and developers explain the technology
3 Modular prototype
- prototype: Version 3.0
- scalable height
- length: 192 mm
- width: 785 mm
- 40 kg weight
- 60 km/h maximum speed
- 65 kg liftig capacity
4 Mechanical construction
The principle of an inverse pendulum without an external counterweight allows a space saving and lightweight concept. Moreover the driving dynamic is maximized by the constant strain of the driving weels.
- direct drive
- increased energy efficiency through selflocking lifting arms
- increased stability through topology optimized design
- size and driving performance scalable,
- dependent on desired characteristics
- configurable design, tuned for the use case
- usage of individual handle technology
5 Hardware architecture and technology
Despite of its versatile capabilities, the whole technology of evoBOT® is completely integrated in the robot. Accordingly no additional hardware is necessary. For the robot layot costefficient components were used that complies to the latest technology regarding precision, efficiency and dynamic.
6 Autonomy und navigation
Localization algorithms are specially developed to allow extreme inclination angle and high velocities. Through this, use indoors and outdoors becomes possible. Further details about autonomy and navigation:
- usage of Visual Slam for navigation indoors and outdoors
- near field recognition by sensors
- localization accuracy in one-digit centimeter range
7 Operation of the robot
The prototype currently has a driving time of 5-8 hours. Furthermore, the evoBOT® is able to drive on different and uneven surfaces. With a suitable surface, a slop of up to 45 degrees can be comfortably managed.
8 Technical data
The compact evoBOT® has a height of 923mm, width of 785mm and length of 192mm, with a weight of 40 kilograms. The maximum speed is 60 km/h with a strong acceleration and braking effect. The lifting capacity is currently at 65 kg and a payload of 100kg. This specification is strongly dependent on the application and can be individually adapted.
参考
1、Fraunhofer Institute for Material Flow and Logistics
2、evoBOT® Homepage
3、Department IoT and Embedded Systems
相关文章:

机器人科普--evoBOT
机器人科普--evoBOT 1 介绍2 视频3 Modular prototype4 Mechanical construction5 Hardware architecture and technology6 Autonomy und navigation7 Operation of the robot8 Technical data参考 1 介绍 The evolution of autonomous mobile robotic systems 2 视频 evoBOT…...
数据结构课程设计——运动会分数统计
运动会分数统计 数据结构课程设计任务书 学生姓名:xxx 专业班级:软件工程 指导教师: 工作单位: 题 目: 运动会分数统计 基础要求: 要求具有C语言的理论基础…...
C语言递归算法实现经典例题
一.递归 1.什么是递归 递归是一种编程技术,它通过在函数内部反复调用自身来解决问题。当一个程序调用自己时,这就称为递归调用。递归可以有助于简化某些算法的实现和理解。在递归过程中,每个调用都会将一些数据保存在栈上,直到递…...
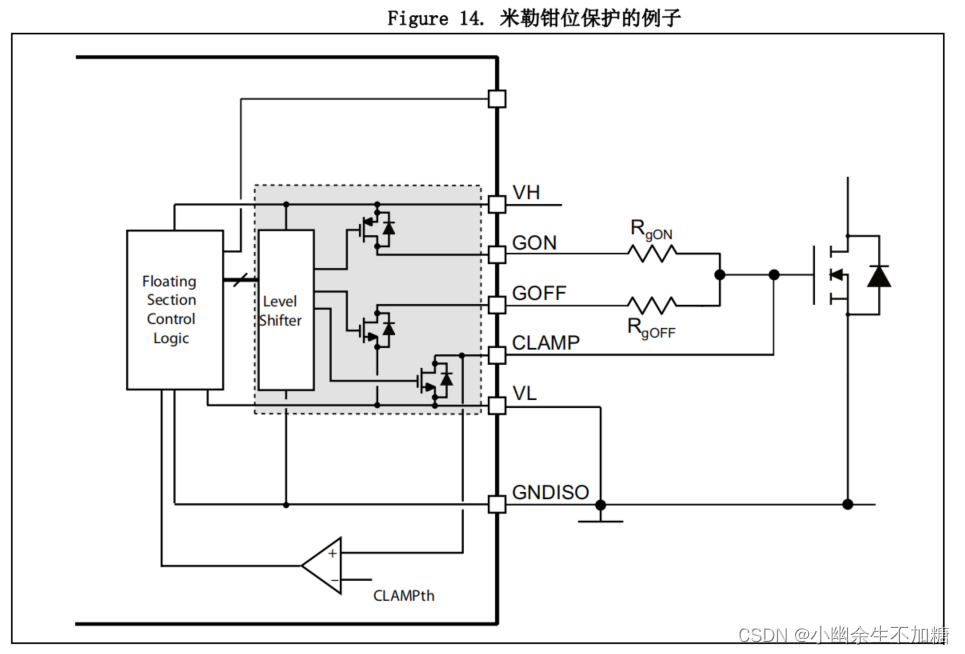
ST典型碳化硅MOSFET驱动应用方案
ST典型碳化硅MOSFET驱动应用方案 1.栅极驱动器规格和功能实现 参考资料:ST官网应用手册《AN4671》 作者:Xiou 1.栅极驱动器规格和功能实现 以下是对栅极驱动要求的简短列表: dv / dt 的瞬变抗扰度:在整个温度范围内 50 V/ns。 …...

对比AMD和英特尔显卡的区别
✨求关注~ 😀博客:www.protaos.com AMD和英特尔都是著名的半导体公司,它们都生产处理器和显卡。在显卡领域,AMD生产Radeon系列显卡,而英特尔则生产Intel HD Graphics和Intel Iris Graphics系列显卡。 使用群体对比&…...

Linux系统c语言socket实现UDP通信
UDP全称 User Datagram Protocol,即:用户数据报协议。是面向无连接的协议。通常,UDP 通信还会被冠以不可靠的头衔。这里的不可靠指的是:无法可靠地得知对方是否收到数据。 UDP有如下特征: 无连接:通信双方不需要事先连接无确认:收到数据不给对方发回执确认不保证有序、丢…...

常用五大类RFID系统,实践领域广泛,加强现代化管理
随着信息技术的不断进步,RFID技术已逐渐成为企业管理及社会服务领域中不可或缺的一种重要技术手段。根据其不同的应用场景,RFID技术广泛应用于药品监管、固定资产管理、仓储管理、智慧工厂和消费服务等领域。本文将从五个方面介绍常用的RFID系统。 一、…...

卡方检验.医学统计实例详解
卡方检验是一种常用的假设检验方法,通常用于分析两个或多个分类变量之间的关系。在医学研究中,卡方检验被广泛应用于分析两种或多种治疗方法的疗效,或者分析某种疾病的发病率与某些危险因素之间的关系。下面我们来看一个卡方检验在医学实例中…...

H264和AAC打包PS包代码
段老师的干货时间又到咯,下面代码实现的是将 AAC 和 H264 数据打包成 PS 包的流程,其中包括了 PES 头、PSI 表头、MPEG-TS 头、AAC/H264 数据打包等多个步骤。此外,还包含 CRC32 校验等校验码的计算。需要注意的是,此代码示例仅供…...

Redis数据类型-ZSet
一. 概述 SortedSet又叫zset,它是Redis提供的特殊数据类型,是一种特殊的set类型,继承了set不可重复的特点,并在set基础上为每个值添加一个分数,用来实现值的有序排列。 二. 常用指令 明白它的特点后,接下来…...

国外各大学和学院对于ChatGPT使用立场总结
ChatGPT和生成式AI的快速普及对教育这个专业领域带来了威胁——全国各地的大学和学院都召开了紧急会议,讨论如何应对学生利用AI作弊的风险。 一部分学校和教授担心这项技术会成为学生在论文或其他写作作业和考试中寻求捷径的工具。而这种生成内容的方式往往能够绕开…...
我在VScode学Java(Java二维数组)
我的个人博客主页:如果\真能转义1️⃣说1️⃣的博客主页 关于Java基本语法学习---->可以参考我的这篇博客:(我在Vscode学Java) 接上回Java一维数组的介绍(我在VScode学Java(Java一维数组) ) 二维数组是Java中的一…...
HTML-iconfont动态图标SVG效果--阿里巴巴图标矢量库
给北大打工,实现官网首页动态图标效果_哔哩哔哩_bilibilihttps://www.bilibili.com/video/BV1Ys4y1c7oh/?spm_id_from333.1007.top_right_bar_window_default_collection.content.click&vd_source924f5dad6f2dcb0a3e5dca4604287ecd(本篇笔记操作方法…...

C++17完整导引-模板特性之编译器的if语句
编译期if语句 if constexpr 编译期if语句使用编译期if语句编译期if的注意事项编译期if影响返回值类型即使在 *then* 部分返回也要考虑 *else* 部分编译期短路求值 其他编译期if的示例完美返回泛型值使用编译期if进行类型分发 带初始化的编译期if语句在模板之外使用编译期if参考…...
告别Excel,免费大数据分析与可视化工具,让你的论文图表“高大上”
数据分析工具很多,可以分为表格、数据库、BI工具、编程等四大工具。每个大类又有很多的工具,例如表格包括Excel、WPS、Google Sheets、Airtable等。编程工具包括Python和R。 搞科研几年了,笔者一直都是在使用Excel做数据分析和可视化…...

C++ 中的继承和多态
C 中的继承和多态 一、继承二、函数重载、隐藏、覆盖、重写1.函数重载(Function Overload)2.函数隐藏(Function Hiding)3.函数重写与函数覆盖(Function Override) 三、多态四、纯虚函数和抽象类五、多重继承…...
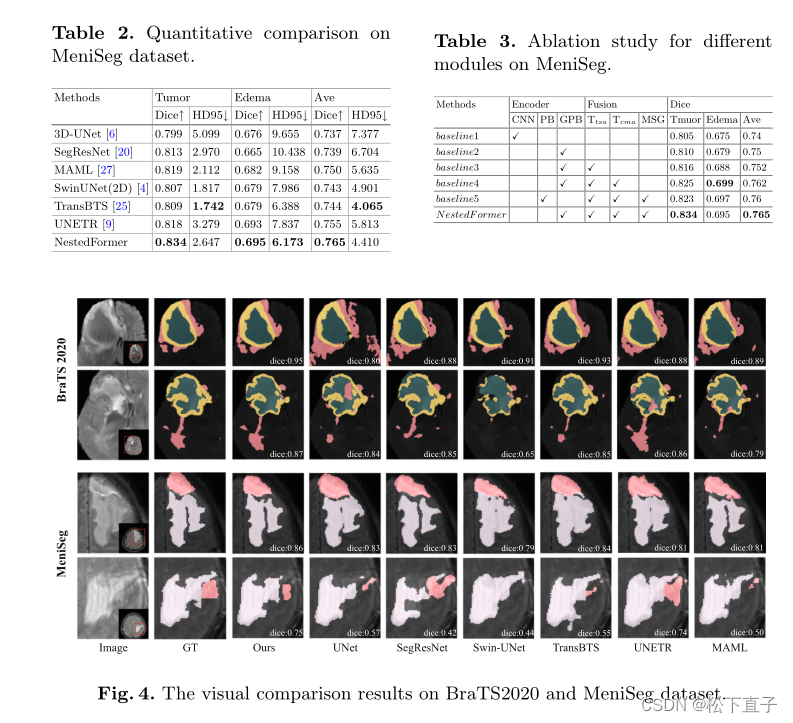
NestedFormer:用于脑肿瘤分割的嵌套模态感知Transformer
文章目录 NestedFormer: Nested Modality-AwareTransformer for Brain Tumor Segmentation摘要方法Global Poolformer EncoderNested Modality-Aware Feature AggregationModality-Sensitive Gating 实验结果 NestedFormer: Nested Modality-AwareTransformer for Brain Tumor …...
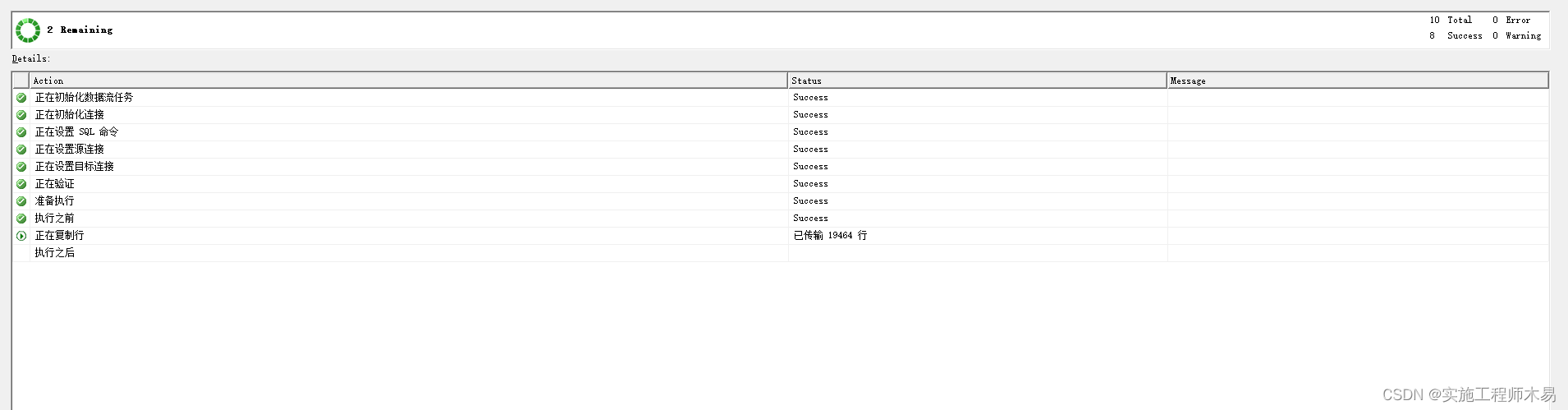
【SQLServer】sqlserver数据库导入oracle
将sqlserver数据库导入到oracle 实用工具: SQL Server Management Studio 15.0.18424.0 SQL Server 管理对象 (SMO) 16.100.47021.07eef34a564af48c5b0cf0d617a65fd77f06c3eb1 Microsoft Analysis Services 客户端工具 15.0.19750.0 Microsoft 数据访问组件 (MDAC) …...

【5.20】四、性能测试—性能测试工具
目录 4.5 性能测试工具 4.5.1 LoadRunner 4.5.2 JMeter 4.5 性能测试工具 性能测试是软件测试中一个很重要的分支,人们为了提高性能测试的效率,开发出了很多性能测试工具。一款好的测试工具可以极大地提高测试效率,为发现软件缺陷提供重要…...
)
朗诵素材-《少年正是读书时》(两角色主持朗诵)
少年正是读书时 1、少年正是读书时 男:我们生活在/古老的土地上 男:我们拥有/共同的梦想 女:那朗朗的书声/那浓浓的墨香 女:都在告诉我们 合:少年正是/读书时 2、为何要读书 男:养心&am…...

Taotoken的TokenPlan套餐如何实现更经济的模型调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的TokenPlan套餐如何实现更经济的模型调用 1. 理解TokenPlan的计费模式 在模型应用开发过程中,成本的可预测性…...

Lampiao 靶场
Lampiao 靶场完整渗透解析一、靶场环境信息攻击机(Kali)IP:192.168.146.128靶机 IP:192.168.146.129目标:获取靶机 root 权限与 flag二、步骤 1:信息收集(端口与服务扫描)nmap -p- -…...

[智能体-69]:重新认知MCP:协议不生产智能,只是AI全域交互的标准化基石
MCP只是提供了大模型、编排调度、外部工具能够进行结构化交流的标准,而整个系统的智能主要依赖编排调度,与外部软件系统的交互取决于外部工具,包括外部语音交互、视觉交互、数字化交互。当下MCP(Model Context Protocol࿰…...

从游戏引擎到仿真平台:手把手教你用AirSim+UE4搭建你的第一个无人机/自动驾驶仿真环境
从游戏引擎到仿真平台:构建AirSimUE4无人机与自动驾驶仿真环境实战指南当游戏引擎遇上机器人算法测试,会碰撞出怎样的火花?微软开源的AirSim项目将虚幻引擎(Unreal Engine)从游戏开发领域引入到自动驾驶和无人机研究的…...

深度解析网络设备权限管理工具:中兴光猫工厂模式与Telnet服务完整指南
深度解析网络设备权限管理工具:中兴光猫工厂模式与Telnet服务完整指南 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 在当今网络设备管理领域,获取设备完整控制…...

遭遇薪酬倒挂后的反向谈判与资产重估策略「蒸汽求职分享」
在 2026 年全球科技大厂与跨国泛金融巨头追求极致人效、频繁进行组织架构重组(Reorg)的买方市场中,一个让无数海外名校留学生在入职两年后心态瞬间崩塌的现象,正在高频发生——“薪酬倒挂(Salary Inversion)…...
)
保姆级教程:手把手教你搞定ESXi 6.7安装前的BIOS设置(VT-x/VT-d/AES全开)
从零开始:ESXi 6.7安装前的BIOS设置终极指南当你第一次接触企业级虚拟化平台时,那种既兴奋又忐忑的心情我完全理解。作为过来人,我记得自己第一次在Dell PowerEdge服务器上安装ESXi时,光是搞清楚BIOS里那些晦涩的选项就花了整整一…...

NPU跑LLM实战指南:KV Cache动态性如何突破硬件限制
NPU跑LLM实战指南:KV Cache动态性如何突破硬件限制 副标题: 从预分配+Attention Mask到三层软件栈,完整解析NPU推理架构 痛点:为什么NPU跑LLM这么难? LLM的生成机制和NPU的硬件特性存在根本冲突: LLM特性 NPU特性 冲突点 逐token生成 固定shape执行 KV Cache动态增长 动…...

抖音批量下载助手:一键构建你的专属视频素材库
抖音批量下载助手:一键构建你的专属视频素材库 【免费下载链接】douyinhelper 抖音批量下载助手 项目地址: https://gitcode.com/gh_mirrors/do/douyinhelper 还在为手动保存抖音视频而烦恼吗?想要批量获取心仪创作者的精彩内容却无从下手&#x…...

自然语言处理的实战项目:从0到1搭建属于自己的文本分类系统
对于软件测试从业者而言,日常工作中我们每天都会接触大量的文本数据:缺陷管理系统中的bug描述、测试用例的步骤说明、用户反馈的问题报告、需求文档的规格描述,甚至是接口返回的异常信息文本。这些非结构化文本往往隐含着关键业务信息&#x…...