Jeston Orin Nnao 安装pytorch与torchvision环境
大家好,我是虎哥,Jeston Orin nano 8G模块,提供高达 40 TOPS 的 AI 算力,安装好了Jetpack5.1之后,我们需要配置一些支持环境,来为我们后续的深度学习开发提供支持。本章内容,我将主要围绕安装对应版本pytorch跟torchvision展开。

安装好了Jetpack5.1之后,我才发现英伟达官方还没有正式发布适配的pytorch版本跟torchvision版本,但是我在官方的论坛里面发现了这个:Installing PyTorch for Jetson Platform - NVIDIA Docs
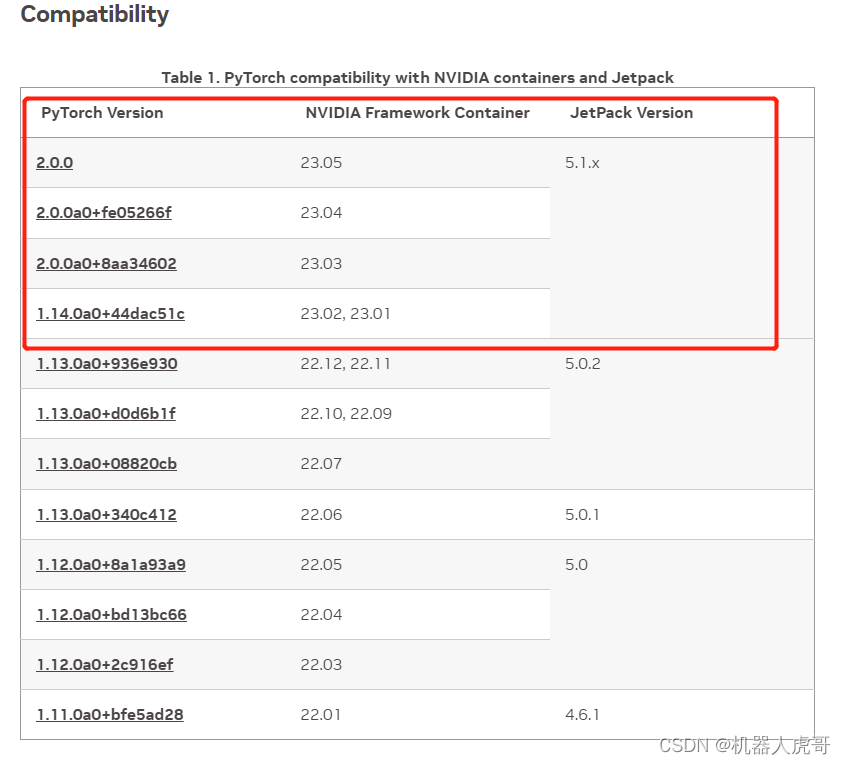
通过:PyTorch for Jetson - Jetson Nano - NVIDIA Developer Forums介绍,我们找到了对应的版本。
0、针对自己的系统选择对应版本
参考入口:PyTorch for Jetson - Jetson Nano - NVIDIA Developer Forums
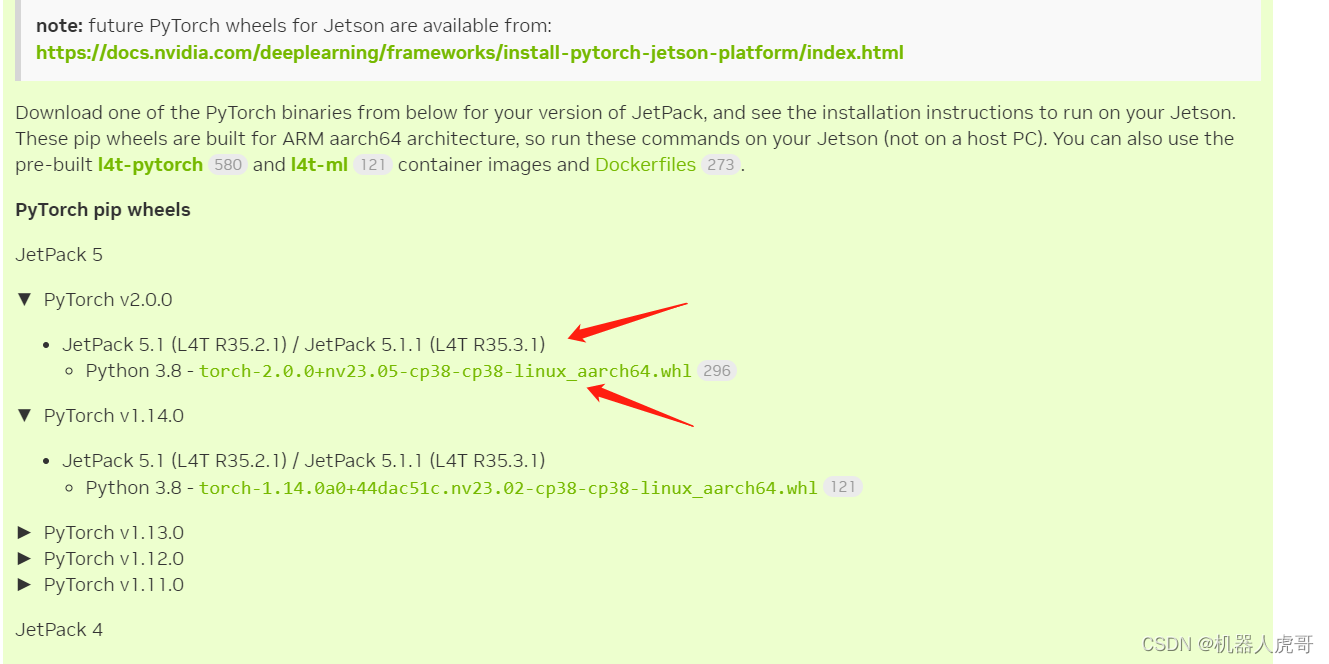
 所以我们选择
所以我们选择
Python 3.8 - torch-2.0.0+nv23.05-cp38-cp38-linux_aarch64.whl 296
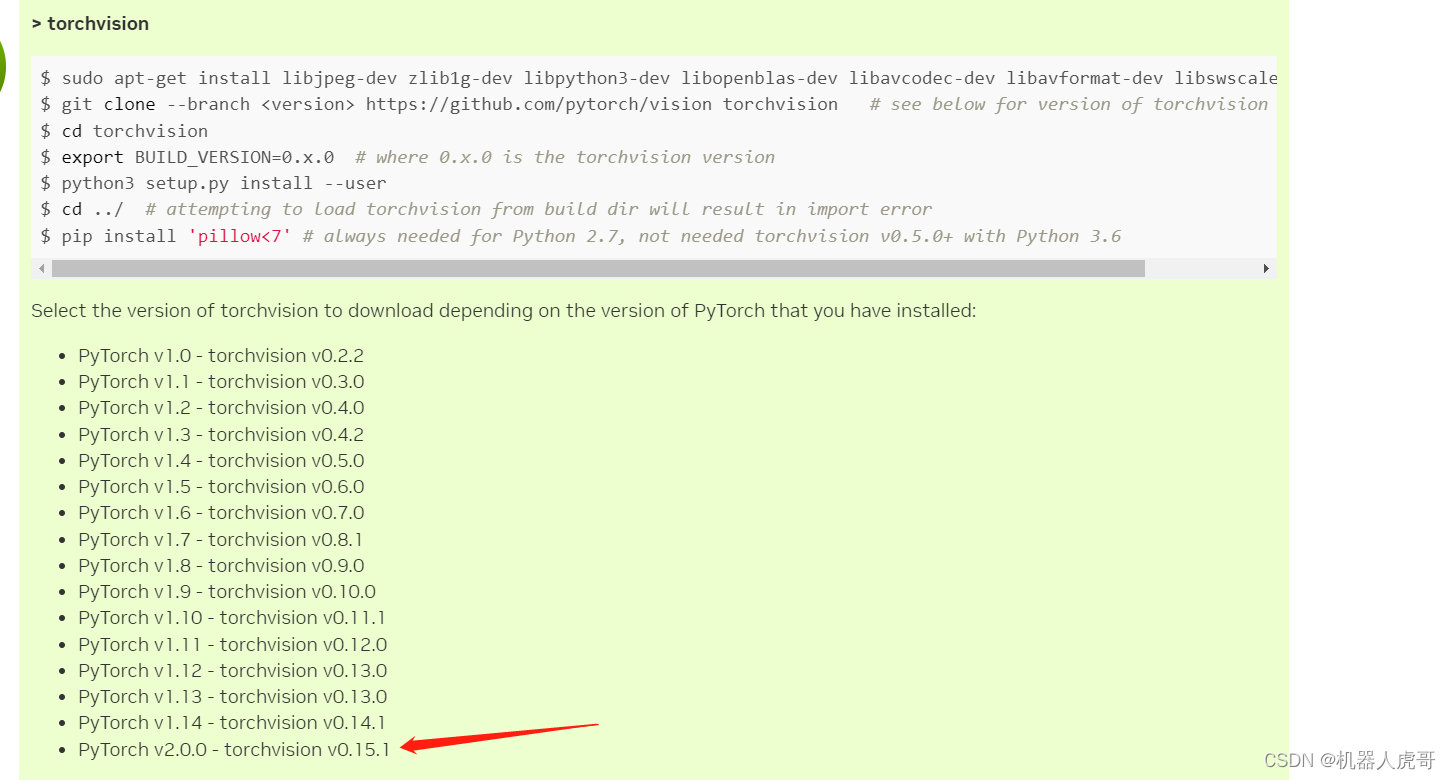
PyTorch v2.0.0 - torchvision v0.15.11、JetPack 5.1.1
JetPack 5.1.1是一个生产质量版本,支持Jetson Orin Nano开发套件、Jetson AGX Orin 64GB、Jetson OrinNX 8GB、Jetson Orin Nano 8GB和Jetson Orin-Nano 4GB模块。它包括带有Linux内核5.10的Jetson Linux 35.3.1 BSP、基于Ubuntu 20.04的根文件系统、基于UEFI的引导加载程序和作为可信执行环境的OP-TEE。JetPack 5.1.1包CUDA 11.4、TensorRT 8.5.2、cuDNN 8.6.0和VPI 2.2,以及其他更新。
-
VPI (Vision Programing Interface) 是一个软件库,提供在Jetson上的多个硬件加速器上实现的计算机视觉/图像处理算法,如PVA(可编程视觉加速器)、GPU、NVDEC(NVIDIA解码器)、NVENC(NVID IA编码器)、VIC(视频图像合成器)等。
-
NVIDIA Isaac™ ROS 是一组硬件加速包,使ROS开发人员更容易在NVIDIA硬件(包括NVIDIA Jetson)上构建高性能解决方案。
Isaac ROS DP3版本支持JetPack 5.1.1
如何在Jeston Orin Nnao 刷对应JetPack 5.1.1的系统,请参考我之前的文章。【Jeston Orin】Orin nano 8G模块使用官方系统包生成标准烧写系统测试_机器人虎哥的博客-CSDN博客
2、PyTorch on Jetson Platform
PyTorch(用于JetPack)是一个用于深度学习的优化张量库,用于自然语言处理等应用程序。它主要由Facebookd的人工智能小组开发,不仅能够 实现强大的GPU加速,同时还支持动态神经网络,这一点是现在很多主流框架如TensorFlow都不支持的。 PyTorch提供了两个高级功能:
-
具有强大的GPU加速的张量计算(如Numpy)
-
包含自动求导系统的深度神经网络
3、安装环境确认说明
Jetpack默认已安装opencv、cuda、cudnn,故只需再安装pytorch即可,留意jetson是arm架构,需要下载对应的安装文件加以安装
1、确认系统版本
nvidia@nvidia-desktop:~$ sudo lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 20.04.5 LTS
Release: 20.04
Codename: focal2、确认L4T版本版本
nvidia@nvidia-desktop:~$ head -n 1 /etc/nv_tegra_release
# R35 (release), REVISION: 3.1, GCID: 32827747, BOARD: t186ref, EABI: aarch64, DATE: Sun Mar 19 15:19:21 UTC 2023说明使用的是R35.3.1系统。
3、确认Jetson版本
jetson_release -v
nvidia@nvidia-desktop:~$ jetson_release -v
Software part of jetson-stats 4.2.1 - (c) 2023, Raffaello Bonghi
Model: NVIDIA Orin Nano Developer Kit - Jetpack 5.1.1 [L4T 35.3.1]
NV Power Mode[0]: 15W
Serial Number: [XXX Show with: jetson_release -s XXX]
Hardware:- 699-level Part Number: 699-13767-0003-300 L.3- P-Number: p3767-0003- Module: NVIDIA Jetson Orin Nano (8GB ram)- SoC: tegra23x- CUDA Arch BIN: 8.7- Codename: P3768
Platform:- Machine: aarch64- System: Linux- Distribution: Ubuntu 20.04 focal- Release: 5.10.104-tegra- Python: 3.8.10
jtop:- Version: 4.2.1- Service: Active
Libraries:- CUDA: 11.4.315- cuDNN: 8.6.0.166- TensorRT: 8.5.2.2- VPI: 2.2.7- Vulkan: 1.3.204- OpenCV: 4.5.4 - with CUDA: NO4、PYthon 版本:
nvidia@nvidia-desktop:~$ python --version
Python 2.7.18
nvidia@nvidia-desktop:~$ python3 --version
Python 3.8.104、PyTorch安装步骤
4.1 安装系统支持包
sudo apt-get -y update;
sudo apt-get -y install autoconf bc build-essential g++-8 gcc-8 clang-8 lld-8 gettext-base gfortran-8 iputils-ping libbz2-dev libc++-dev libcgal-dev libffi-dev libfreetype6-dev libhdf5-dev libjpeg-dev liblzma-dev libncurses5-dev libncursesw5-dev libpng-dev libreadline-dev libssl-dev libsqlite3-dev libxml2-dev libxslt-dev locales moreutils openssl python-openssl rsync scons python3-pip libopenblas-dev;国内安装经常会有网络无法连接发生各种错误,没事多执行几次命令行肯定可以安装成功的(我的个人经验)。
4.2 配置环境变量
#注意,我们安装的JetPack 5.1.1,所以找对版本对应
export TORCH_INSTALL=https://developer.download.nvidia.cn/compute/redist/jp/v511/pytorch/torch-2.0.0+nv23.05-cp38-cp38-linux_aarch64.whl
#`JP_VERSION`
#The major and minor version of JetPack you are using, such as `461` for JetPack 4.6.1 or `50` for JetPack 5.0.4.3 在线安装
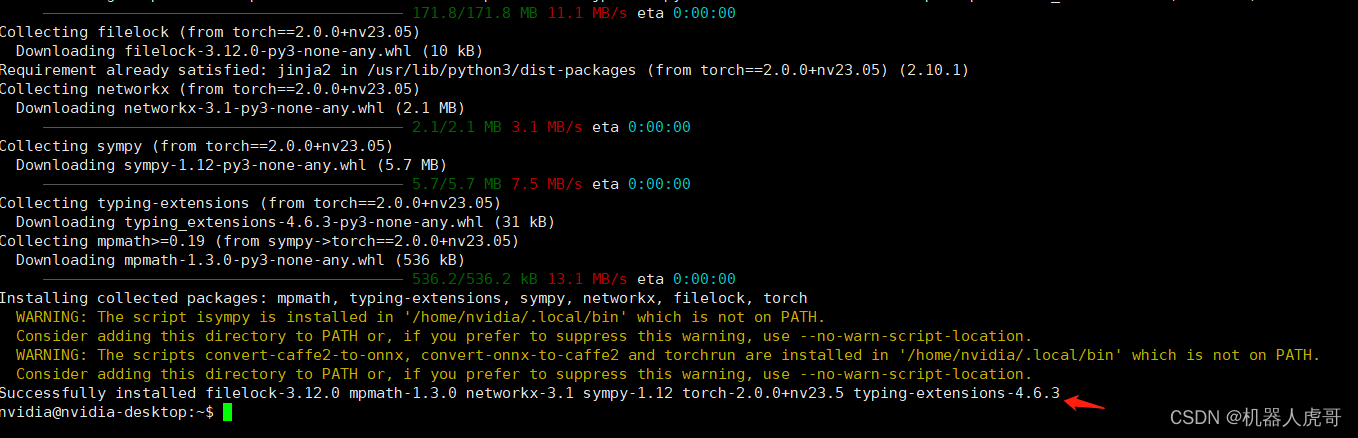
python3 -m pip install --upgrade pip; python3 -m pip install aiohttp numpy=='1.19.4' scipy=='1.5.3' export "LD_LIBRARY_PATH=/usr/lib/llvm-8/lib:$LD_LIBRARY_PATH"; python3 -m pip install --upgrade protobuf; python3 -m pip install --no-cache $TORCH_INSTALL 类似的报错可以不用理会
类似的报错可以不用理会
4.4 验证安装是否成功
要验证PyTorch是否已成功安装在Jetson平台上,您需要启动Python提示并导入PyTorch。
$ export LD_LIBRARY_PATH=/usr/lib/llvm-8/lib:$LD_LIBRARY_PATH
$ python3之后在python3的环境输入
>>> import torch
>>> print(torch.__version__)
>>> print('CUDA available: ' + str(torch.cuda.is_available()))
>>> print('cuDNN version: ' + str(torch.backends.cudnn.version()))
>>> a = torch.cuda.FloatTensor(2).zero_()
>>> print('Tensor a = ' + str(a))
>>> b = torch.randn(2).cuda()
>>> print('Tensor b = ' + str(b))
>>> c = a + b
>>> print('Tensor c = ' + str(c))如果PyTorch安装正确,则执行此命令时应不会出现错误。

4.5 卸载(如果有需要)
PyTorch可以使用pip3卸载命令轻松卸载,如下所示:
$ sudo pip3 uninstall -y torch5、torchvision 0.15.1安装
5.1 安装
安装好pytorch之后,使用下面的命令行从源码安装torchvision 0.15.1版本,先安装依赖,然后下载安装包,最后从源码编译安装,大概十分钟左右就好,相关命令行如下:
sudo apt install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-devpip3 install --upgrade pillowwget https://github.com/pytorch/vision/archive/refs/tags/v0.15.1.zipcd vision-0.15.1export BUILD_VERSION=0.15.1python3 setup.py install --user官方指导步骤
$ sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libopenblas-dev libavcodec-dev libavformat-dev libswscale-dev
$ git clone --branch <version> https://github.com/pytorch/vision torchvision # see below for version of torchvision to download
$ cd torchvision
$ export BUILD_VERSION=0.x.0 # where 0.x.0 is the torchvision version
$ python3 setup.py install --user
$ cd ../ # attempting to load torchvision from build dir will result in import error
$ pip install 'pillow<7' # always needed for Python 2.7, not needed torchvision v0.5.0+ with Python 3.6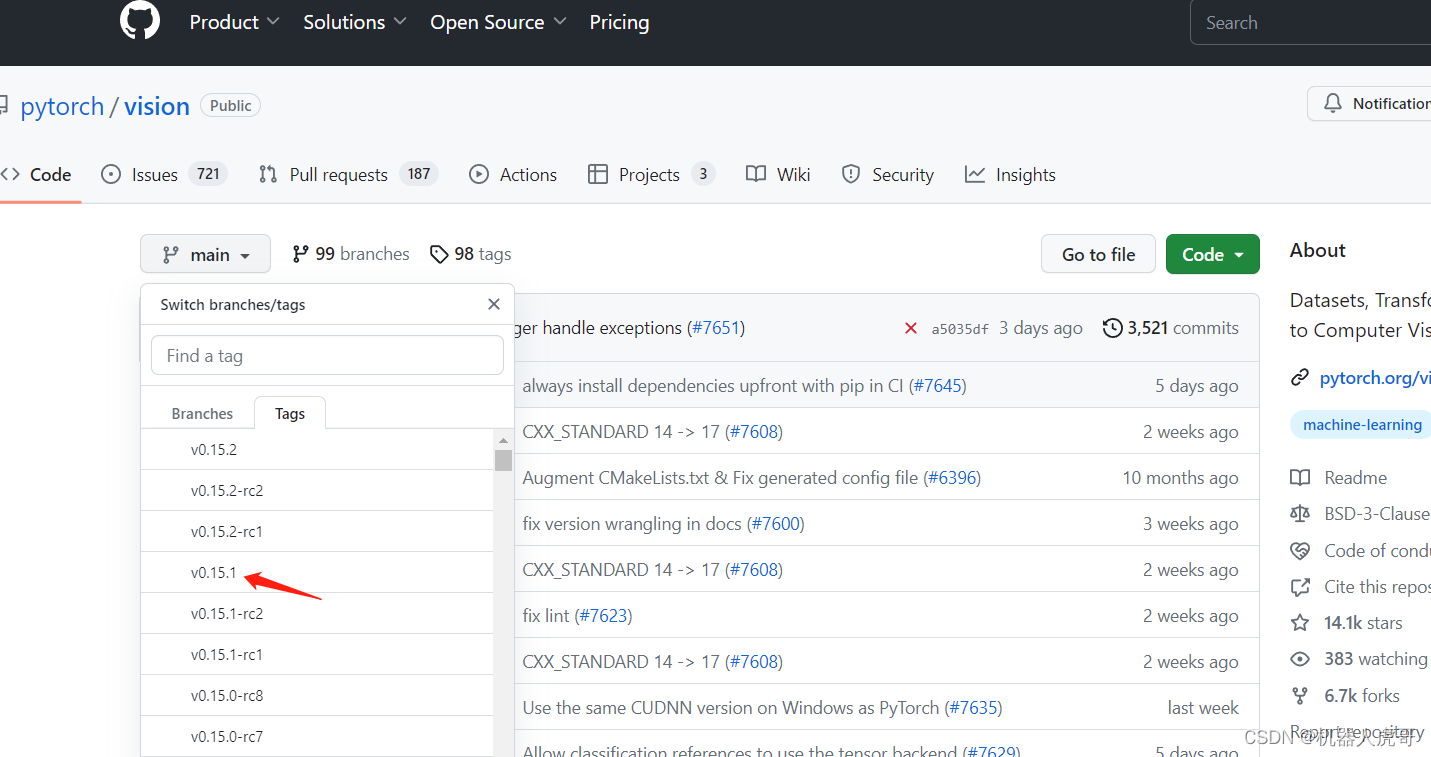
我自己操作的步骤
$ sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libopenblas-dev libavcodec-dev libavformat-dev libswscale-dev
#这个官方教程没写
$ pip3 install setuptools
#$ sudo pip3 install --upgrade pillowwget https://github.com/pytorch/vision/archive/refs/tags/v0.15.1.zip
#$ git clone --branch v0.15.1 https://github.com/pytorch/vision torchvision
#克隆源代码
git clone --branch v0.15.1 https://github.com/pytorch/vision torchvision
cd torchvision/
git checkout -b v0.15.1
#查看当前分支
git branch -a
#如果一直无法拉过来,可以选择使用迅雷下载包后拷贝到开发套件中
$ unzip v0.15.1.zip
$ cd vision-0.15.1
$ export BUILD_VERSION=0.15.1
$ python3 setup.py install --user同样不行就执行几次,肯定会成功安装的,我安装与运行的截图如下:
 开始编译
开始编译
 编译安装完毕。
编译安装完毕。

5.2 验证安装
如果torchvision安装正确,则执行此命令时应不会出现错误。
>>> import torchvision
>>> print(torchvision.__version__)
6、python TensorRT支持
都安装好了用pip3 list查一下
pip3 list
发现如下信息,说明全部环境配置完毕
tensorrt 8.5.2.2
torch 2.0.0+nv23.5
torchvision 0.15.1 tensorrt 如果没有,记得用SDK manager 刷一下官方的cuda等支持库就有了
7、总结:
Jeston Orin Nnao -JetPack5.1.1环境下安装很还算顺利,按照以上步骤,中间可能会有几次反复,但是最终都可以完整的配置好环境。
以上就是我今天要分享的内容。纠错,疑问,交流: 911946883@qq.com
相关文章:
Jeston Orin Nnao 安装pytorch与torchvision环境
大家好,我是虎哥,Jeston Orin nano 8G模块,提供高达 40 TOPS 的 AI 算力,安装好了Jetpack5.1之后,我们需要配置一些支持环境,来为我们后续的深度学习开发提供支持。本章内容,我将主要围绕安装对…...

ROS:常用可视化工具的使用
目录 一、日志输出工具——rqt_console二、绘制数据曲线——rqt_plot三、图像渲染工具——rqt_image_view四、图形界面总接口——rqt五、Rviz六、Gazebo 一、日志输出工具——rqt_console 启动海龟键盘控制节点,打开日志输出工具 roscorerosrun turtlesim turtles…...
智能应用搭建平台——LCHub低代码表单 vs 流程表单 vs 仪表盘
1. LCHub低代码如何选择 「流程表单」:填报数据,并带有流程审批功能,适合报销、请假申请或其他工作流; 「表单」:填报数据,并带有数据协作功能,如修改、删除、导入、导出,并可以给不同的人不同的管理权限; 「仪表盘」:数据分析处理、结果展示功能,如数据汇总、趋…...

Mac下通过Docker安装ElasticSearch集群
1、安装ElasticSearch 使用docker直接获取es镜像,执行命令docker pull elasticsearch:7.7.0 执行完成后,执行docker images即可看到上一步拉取的镜像。 2、创建数据挂在目录,以及配置ElasticSearch集群配置文件 创建数据文件挂载目录 mkdir -…...

MySQL redo log、undo log、binlog
MySQL是一个广泛使用的关系型数据库管理系统,它通过一系列的日志来保证数据的一致性和持久性。在MySQL中,有三个重要的日志组件,它们分别是redo log(重做日志)、undo log(回滚日志)和binlog&…...

文件包含漏洞
一、原理解析。 开发人员通常会把可重复使用的函数写到单个文件中,在使用到某些函数时,可直接调用此文件,而无须再次编写,这种调用文件的过程被称为包含。 注意:对于开发人员来讲,文件包含很有用…...

Python 中的 F-Test
文章目录 F 统计量和 P 值方差(ANOVA) 分析中的 F 值 本篇文章介绍 F 统计、F 分布以及如何使用 Python 对数据执行 F-Test 测试。 F 统计量是在方差分析检验或回归分析后获得的数字,以确定两个总体的平均值是否存在显着差异。 它类似于 T 检验的 T 统计量…...

Docker网络模式
一、docker网络概述 1、docker网络实现的原理 Docker使用Linux桥接,在宿主机虚拟一个Docker容器网桥(docker0),Docker启动一个容器时会根据Docker网桥的网段分配给容器一个IP地址,称为Container-IP, 同时Docker网桥是 每个容器的…...

百度离线资源治理
作者 | 百度MEG离线优化团队 导读 近些年移动互联网的高速发展驱动了数据爆发式的增长,各大公司之间都在通过竞争获得更大的增长空间,大数据计算的效果直接影响到公司的发展,而这背后其实依赖庞大的算力及数据作为支撑,因此在满足…...
C++进阶之继承
文章目录 前言一、继承的概念及定义1.继承概念2.继承格式与访问限定符3.继承基类与派生类的访问关系变化4.总结 二、基类和派生类对象赋值转换基本概念与规则 三、继承中的作用域四、派生类的默认成员函数五、继承与友元六、继承与静态成员六、复杂的菱形继承及菱形虚拟继承七、…...
在 Transformers 中使用约束波束搜索引导文本生成
引言 本文假设读者已经熟悉文本生成领域波束搜索相关的背景知识,具体可参见博文 如何生成文本: 通过 Transformers 用不同的解码方法生成文本。 与普通的波束搜索不同,约束 波束搜索允许我们控制所生成的文本。这很有用,因为有时我们确切地知…...
Centos7更换OpenSSL版本
OpenSSL 1.1.0 用户应升级至 1.1.0aOpenSSL 1.0.2 用户应升级至 1.0.2iOpenSSL 1.0.1 用户应升级至 1.0.1u 查看openssl版本 openssl version -v选择升级版本 我的版本是OpenSSL 1.0.2系列,所以要升级1.0.2i https://www.openssl.org/source/old/1.0.2/openssl-…...
基于摄影测量的三维重建【终极指南】
我们生活的时代非常令人兴奋,如果你对 3D 东西感兴趣,更是如此。 我们有能力使用任何相机,从感兴趣的物体中捕捉一些图像数据,并在眨眼间将它们变成 3D 资产! 这种通过简单的数据采集阶段进行的 3D 重建过程是许多行业…...

配置ThreadPoolExecutor
ThreadPoolExecutor为一些Executor 提供了基本的实现,这些Executor 是由Executors中的newCachedThreadPool、newFixedThreadPool和newScheduledThreadExecutor 等工厂方法返回的。ThreadPoolExecutor是一个灵活的、稳定的线程池,允许进行各种定制。 如果默认的执行策略不能满足…...
Yolov5s算法从训练到部署
文章目录 PyTorch GPU环境搭建查看显卡CUDA版本Anaconda安装PyTorch环境安装PyCharm中验证 训练算法模型克隆Yolov5代码工程制作数据集划分训练集、验证集修改工程相关文件配置预训练权重文件配置数据文件配置模型文件配置 超参数配置 测试训练出来的算法模型 量化转换算法模型…...
分布式补充技术 01.AOP技术
01.AOP技术是对于面向对象编程(OOP)的补充。是按照OCP原则进行的编写,(ocp是修改模块权限不行,扩充可以) 02.写一个例子: 创建一个新的java项目,在main主启动类中,写如下代码。 package com.co…...
)
QT 多对一服务插件 CTK开发(五)
CTK在软件的开发过程中可以很好的降低复杂性、使用 CTK Plugin Framework 提供统一的框架来进行开发增加了复用性 将同一功能打包可以提供多个应用程序使用避免重复性工作、可以进行版本控制提供了良好的版本更新迭代需求、并且支持动态热拔插 动态更新、开发更加简单快捷 方便…...

[Windows]_[初级]_[创建目录和文件的名字注意事项]
场景 在开发Windows程序时,会出现目录生成了,但是函数无法在目录里创建文件,怎么回事?说明 在之前说过Windows上有些字符是不能作为文件名的[1],但是检查了下出问题的目录名没有非法字符,所以不是这个原因。 把文件的绝对路径打印出来就发现了问题,目录名后边带了空格,…...

「QT」QT5程序设计目录
✨博客主页:何曾参静谧的博客 📌文章专栏:「QT」QT5程序设计 目录 📑【QT的基础知识篇】📑【QT的GUI编程篇】📑【QT的项目示例篇】📑【QT的网络编程篇】📑【QT的数据库编程篇】📑【QT的跨平台编程篇】📑【QT的高级编程篇】📑【QT的开发工具篇】📑【QT的调…...
ConcurrentHashMap核心源码(JDK1.8)
一、ConcurrentHashMap的前置知识扫盲 ConcurrentHashMap的存储结构? 数组 链表 红黑树 二、ConcurrentHashMap的DCL操作 HashMap线程不安全,在并发情况下,或者多个线程同时操作时,肯定要使用ConcurrentHashMap 无论是HashM…...

从登录到支付:手把手教你用RSA签名验签保护Spring Boot API接口安全
从登录到支付:Spring Boot API接口的RSA签名验签实战指南 在数字化业务高速发展的今天,API接口安全已成为系统设计的核心议题。想象这样一个场景:用户通过移动端提交登录请求,黑客在传输过程中篡改了密码字段;或是支付…...

如何高效配置智能游戏助手:绝区零一条龙完整使用攻略
如何高效配置智能游戏助手:绝区零一条龙完整使用攻略 【免费下载链接】ZenlessZoneZero-OneDragon 绝区零 一条龙 | 全自动 | 自动闪避 | 自动每日 | 自动空洞 | 支持手柄 项目地址: https://gitcode.com/gh_mirrors/ze/ZenlessZoneZero-OneDragon 还在为《绝…...

宝塔面板登录教程
1买个服务器2连接ssh-宝塔或者xshell都行3在xshell下载宝塔面板4在服务器主页--在哪里订购的就在有个管理点进去-加入安全组或者添加nat转发。如果不行用bt命令重置端口号再访问,最后重置之后重启一下-bt 15使用nat转发的要用外网端口,宝塔显示的是内网的…...

【大模型服务治理实战指南】:奇点智能大会首发的7大避坑法则与3套可落地架构模板
更多请点击: https://intelliparadigm.com 第一章:大模型服务治理:奇点智能大会 在2024年奇点智能大会上,大模型服务治理成为核心议题。随着LLM推理服务规模化部署,企业面临模型版本混乱、流量调度失衡、资源隔离缺失…...

ARM架构TLB管理机制与RVALE1指令详解
1. ARM架构中的TLB管理机制解析在ARMv8/ARMv9架构中,TLB(Translation Lookaside Buffer)作为内存管理单元(MMU)的核心组件,承担着加速虚拟地址到物理地址转换的关键任务。当CPU需要访问内存时,T…...

LLM应用可观测性实战:基于OpenTelemetry与OpenLLMetry的监控方案
1. 项目概述:当LLM应用遇见可观测性如果你正在开发或维护一个基于大语言模型的应用,那么下面这个场景你一定不陌生:用户反馈说“AI助手刚才的回答很奇怪”,或者“昨天还能正常调用的功能今天突然报错了”。你打开日志,…...

为什么电路中的阻抗需要引入复数?
1、方便计算说法▼无他,就是图个方便计算而已。请看下题,求如图所示电路中电流的大小。电流的频率与电压频率相同,无非就是求解幅值的变化和相位的变化。▼引用一下以前我的一个知乎回答,数学中的数先是从一维数轴开始。▼因电路的…...

量子度量学习的黑盒验证协议设计与实现
1. 量子度量学习与黑盒验证概述量子度量学习(Quantum Metric Learning)是量子机器学习领域的一个重要分支,其核心目标是通过优化量子特征映射,将经典数据转换为量子希尔伯特空间中的态,使得不同类别的数据在量子态空间…...

Arm CoreSight SoC-400 CTI架构与调试技术详解
1. Arm CoreSight SoC-400 CTI架构概述在复杂的多核SoC开发过程中,高效的调试机制是确保系统可靠性的关键。Arm CoreSight架构中的Cross Trigger Interface(CTI)模块作为硬件级调试基础设施,实现了处理器核之间的精确事件同步。So…...

0301国产光刻机突围全景:双工件台+纳米级精密运动控制 1. 双工件台工作逻辑
国产光刻机突围全景:双工件台纳米级精密运动控制 第三卷 双工件台纳米级精密运动控制(A级 中期集中攻坚) 1. 双工件台工作逻辑(喂饭级实操版带量化参数企业单字脱敏) 一、核心定义:先搞懂“双工件台”的本质…...