神经网络:CNN中的filter,kernel_size,strides,padding对输出形状的影响
输入数据在经过卷积层后,形状一般会发生改变,而形状的变化往往与以下四个超参数有关。
1,filter(out_channel)
该超参数控制着输入数据经过卷积层中需要与几个卷积核进行运算,而输入数据与每个卷积核进行卷积运算后会产生一个二维矩阵,因此最后会产生 filter 个矩阵,分别分布在输出的各个通道中。故该超参数决定输出的通道数。
2,kernel_size(k)
卷积核的宽高一般来说是相等的,且都等于kernel_size,对应一个n x n x 3 (忽略样本轴)的输入数据,在经过卷积层后,输出的宽高 = 1 + (n - k) // s,双斜杠表示整除,s表示步幅strides。当n,k,s中的某个宽高不相等时,则输出的宽高需分别代入n, k, s的宽高进行计算。
3,strides(s)
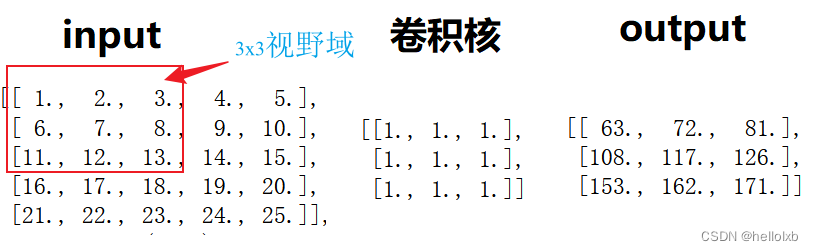
步幅的大小决定了视野域(卷积核的形状映射在输入数据上的窗口)每次移动的距离,输出的宽高符合公式 1 + (n - k) // s。
4,padding
padding的设置在卷积运算之前就对元输入数据进行修改填充0,一般来说padding可取值VALID或SAME(pytorch中可分别对行列进行填充)。
①当取值为VALID时,则可用公式 1 + (n - k) // s 计算输出的宽高。
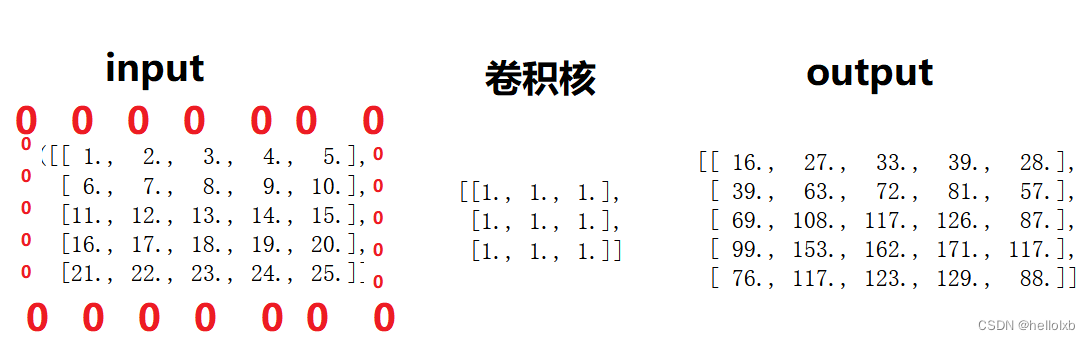
②当取值为SAME时,这时 k 的奇偶性就会影响到填充效果。
A:当 k 为奇数时,则上下左右都会填充 (k - 1) / 2 (可整除)个0行,故宽高可用公式 1 + (n + k - 1 - k) // s = 1 + (n - 1) // s(在Pytorch中,当 padding = SAME 时,s 必须等于1)。如下图(n = 5,k = 3,s = 1)
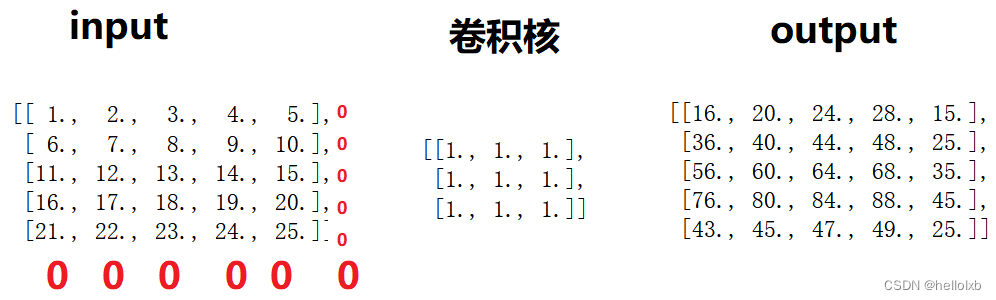
B:当k为偶数时,则上下左右都会填充(k - 1 - 1) / 2 = (k - 2)/ 2 个0行,然后下与右再填充1个0行,故宽高可用公式 1 + (n - k + k - 2 + 1) // s = 1 + (n - 1) // s 。如下图(n = 5,k = 2,s = 1)
综上所述:当取值为SAME时,输出的宽高可用公式 1 + (n - 1) // s 计算。
欢迎提问!
相关文章:
神经网络:CNN中的filter,kernel_size,strides,padding对输出形状的影响
输入数据在经过卷积层后,形状一般会发生改变,而形状的变化往往与以下四个超参数有关。 1,filter(out_channel) 该超参数控制着输入数据经过卷积层中需要与几个卷积核进行运算,而输入数据与每个卷积核进行…...
Spring Boot集成Redisson布隆过滤器案例
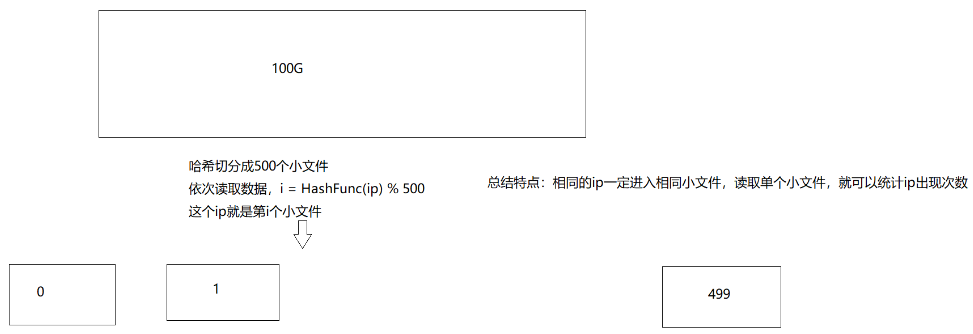
1 什么是布隆过滤器 布隆过滤器实际上是一个非常长的二进制向量(bitmap)和一系列随机哈希函数。那什么又叫哈希函数呢?哈希函数指将哈希表中元素的关键键值通过一定的函数关系映射为元素存储位置的函数。(HashMap源码) 布隆过滤器的优点&…...
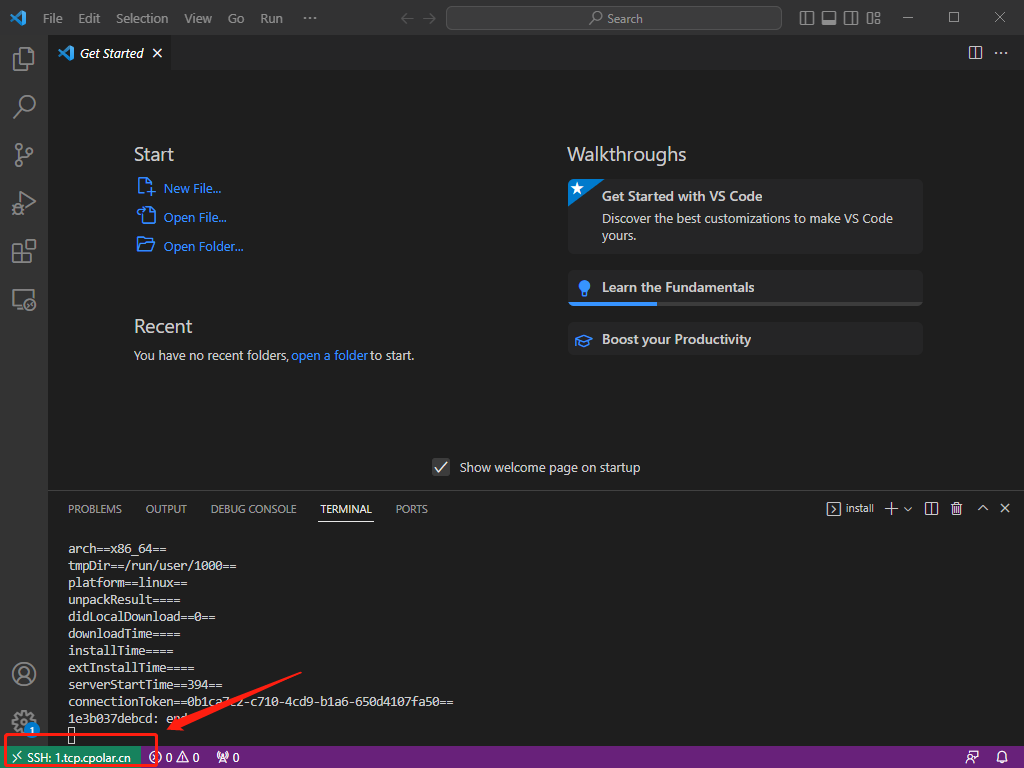
使用 VSCode SSH 公网远程连接本地服务器开发 - cpolar内网穿透
文章目录 前言视频教程1、安装OpenSSH2、vscode配置ssh3. 局域网测试连接远程服务器4. 公网远程连接4.1 ubuntu安装cpolar内网穿透4.2 创建隧道映射4.3 测试公网远程连接 5. 配置固定TCP端口地址5.1 保留一个固定TCP端口地址5.2 配置固定TCP端口地址5.3 测试固定公网地址远程 转…...
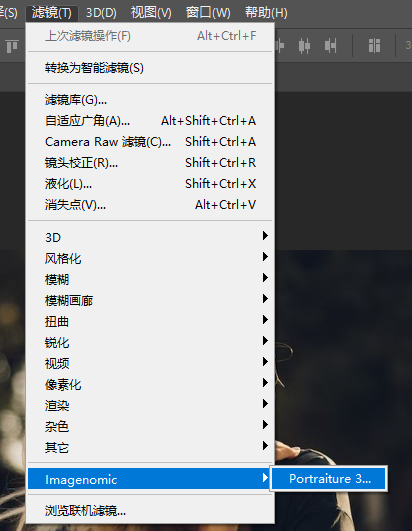
portraiture宿主插件最新v4中文版本下载及使用教程
自拍怎么可以不修图呢?如果要修图的话,磨皮就是其中非常重要的一环。皮肤看起来细腻光滑了,整个人的颜值都会瞬间拉高。下面就让我们介绍一下磨皮用什么软件好用,什么软件可以手动磨皮的相关内容。portraiture是ps人像修图中常用的…...

一. ATR技术指标的定义与运用
一. ATR的定义 1. 什么是ATR ATR英文全名是Average true range,翻译过来就是平均真实波幅,这个指标主要用来衡量最近N天TR(真实波幅)的平均值。 2. ATR相关计算公式 T R [ ( 最高价 − 最低价 ) , ( 前一次收盘价 − 最高价 ) ࿰…...

linux find帮助文档
以下是完整的find命令帮助文档: 用法:find [-H] [-L] [-P] [-D debugopts] [-Olevel] [起始路径…] [表达式] 选项: -H 跟随命令行符号链接 -L 跟随所有符号链接 -P 不跟随任何符号链接(默认) -D debugopts 调试标志…...
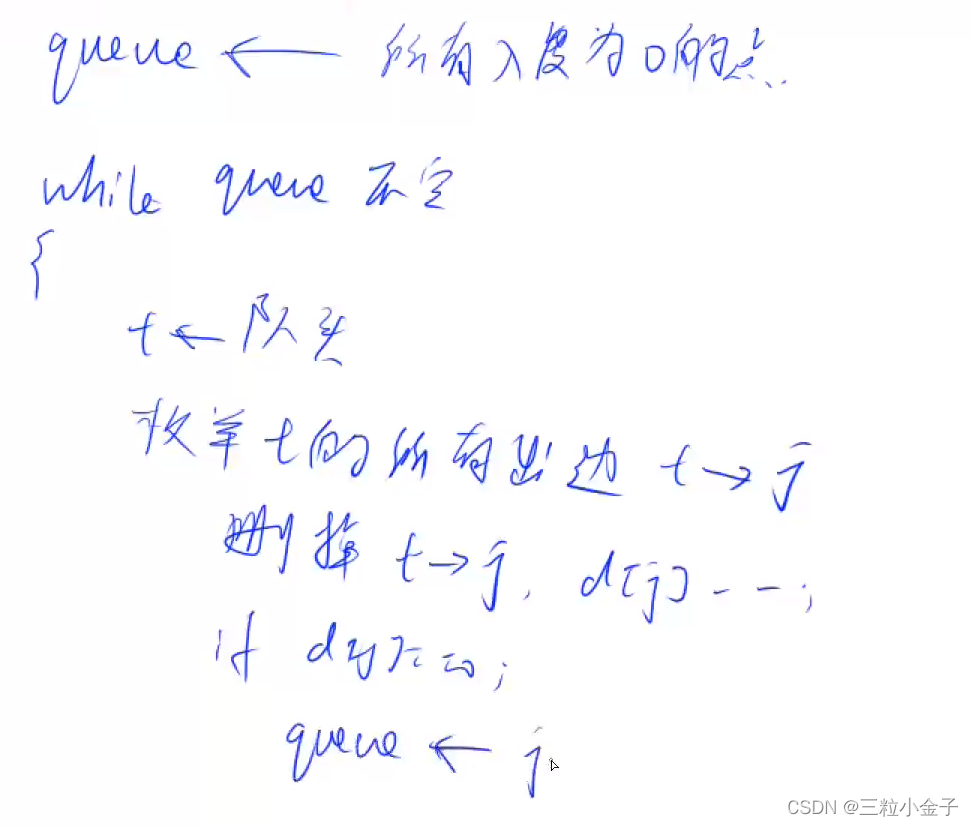
搜索与图论(acwing算法基础)
文章目录 DFS排列数字n皇后 BFS走迷宫 拓扑序列单链表树与图的深度优先搜索模拟队列有向图的拓扑序列 bellman-ford有边数限制的最短路 spfaspfa求最短路spfa判断负环 FloydFloyd求最短路 PrimPrim算法求最小生成树 KruskalKruskal算法求最小生成树 染色法判定二分图染色法判定…...

【数据结构】何为数据结构。
🚩 WRITE IN FRONT 🚩 🔎 介绍:"謓泽"正在路上朝着"攻城狮"方向"前进四" 🔎🏅 荣誉:2021|2022年度博客之星物联网与嵌入式开发TOP5|TOP4、2021|2022博客之星T…...

【P57】JMeter 保存响应到文件(Save Responses to a file)
文章目录 一、保存响应到文件(Save Responses to a file)参数说明二、准备工作三、测试计划设计 一、保存响应到文件(Save Responses to a file)参数说明 可以将结果树保存到文件 使用场景:当结果太大,使…...
Visual Studio 2022 v17.6 正式发布
Visual Studio 17.6 正式发布,这个最新版本提供了一系列强大的工具和功能,旨在使你能够制作出最先进的应用程序。 提高生产力 通过 Visual Studio 2022,目标是帮助你在更短的时间内完成 IDE 内的所有开发任务,在这个版本中&…...

std::chrono时间处理
std::chrono是C11引入的标准库,用于时间的计算和处理。它按照ISO8601标准定义了多个时间类,例如:duration(持续时间)、time_point(时间点)和clock(时钟)。以下是一些常见…...

ieda codeformatV2.xml
ieda codeformatV2.xml 目录概述需求: 设计思路实现思路分析1.codeformatV22.codeformatV23.codeformatV24.codeformatV25.数据处理器 拓展实现 参考资料和推荐阅读 Survive by day and develop by night. talk for import biz , show your perfect code,full busy&…...

Hbase
java客户端 导入maven依赖 XML<dependencies> <dependency> <groupId>org.apache.zookeeper</groupId> <artifactId>zookeeper</artifactId> <version>3.4.6</version> </dependency>…...
[golang 微服务] 5. 微服务服务发现介绍,安装以及consul的使用,Consul集群
一.服务发现介绍 引入 上一节讲解了使用 gRPC创建微服务,客户端的一个接口可能需要调用 N个服务,而不同服务可能存在 不同的服务器,这时,客户端就必须知道所有服务的 网络位置(ipport),来进行连接服务器操作,如下图所示: 以往的做…...
【数据结构】哈希应用
目录 一、位图 1、位图概念 2、位图实现 2.1、位图结构 2.2、比特位置1 2.3、比特位置0 2.4、检测位图中比特位 3、位图例题 3.1、找到只出现一次的整数 3.2、找到两个文件交集 3.3、找到出现次数不超过2次的所有整数 二、布隆过滤器 1、布隆过滤器提出 2、布隆过…...
【 Python 全栈开发 - WEB开发篇 - 31 】where条件查询
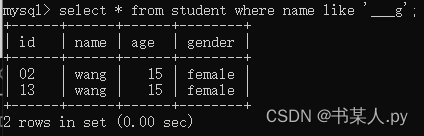
文章目录 一、where条件查询1.关系运算符查询2.IN关键字查询3.BETWEEN AND关键字查询4.空值查询5.AND关键字查询6.OR关键字查询7.LIKE关键字查询普通字符串含有%通配的字符串含有_通配的字符串 一、where条件查询 MySQL 的 where 条件查询是指在查询数据时,通过 wh…...

Android系统的Ashmem匿名共享内存子系统分析(5)- 实现共享的原理
声明 其实对于Android系统的Ashmem匿名共享内存系统早就有分析的想法,记得2019年6、7月份Mr.Deng离职期间约定一起对其进行研究的,但因为我个人问题没能实施这个计划,留下些许遗憾…文中参考了很多书籍及博客内容,可能涉及的比较…...

谈一谈冷门的C语言爬虫
C语言可以用来编写爬虫程序,但是相对于其他编程语言,C语言的爬虫开发可能会更加复杂和繁琐。因为C语言本身并没有提供现成的爬虫框架和库,需要自己编写网络请求、HTML解析等功能。 不过,如果你对C语言比较熟悉,也可以…...

基于状态的维护(CBM)如何推动设备效率提高?
基于状态的维护(Condition-Based Maintenance,CBM)是一种先进的维护策略,通过实时监测和分析设备的状态数据,预测设备故障并采取相应的维护措施。CBM基于数据驱动的方法,能够提高设备的可用性、降低维修成本…...
DC LAB8SDC约束四种时序路径分析
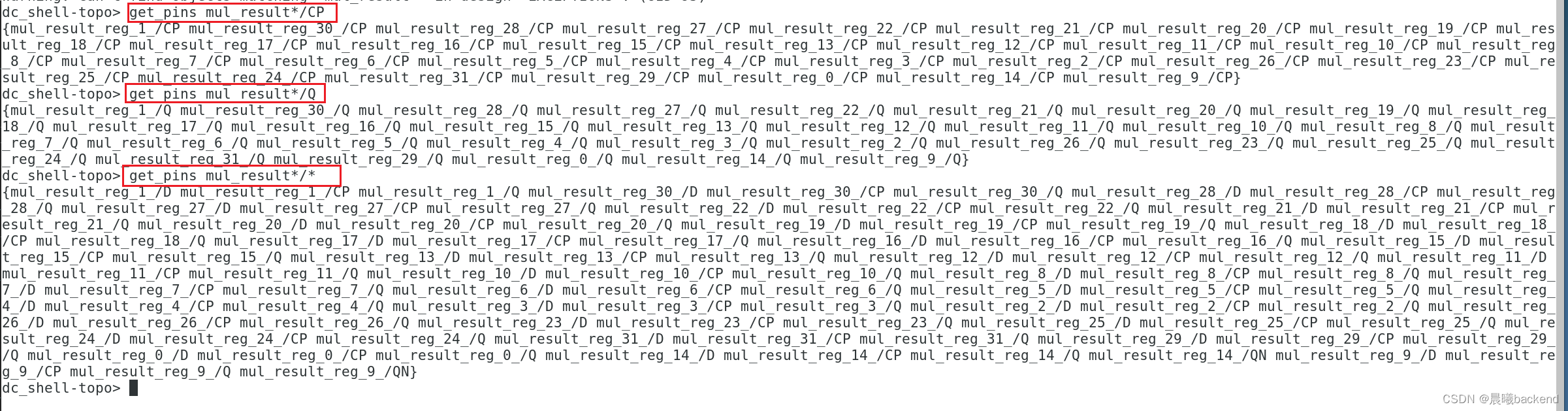
DC LAB 1.启动DC2.读入设计3. 查看所有违例的约束报告3.1 report_constraint -all_violators (alias rc)3.2 view report_constraint -all_violators -verbose -significant_digits 4 (打印详细报告) 4.查看时序报告 report_timing -significant_digits 45. 约束组合逻辑(adr_i…...

KMS智能激活工具终极指南:一键解决Windows和Office激活难题
KMS智能激活工具终极指南:一键解决Windows和Office激活难题 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO KMS_VL_ALL_AIO是一款强大的智能激活脚本,能够帮助用户轻松解…...

Maya摄影机避坑指南:单节点、双节点、三节点到底怎么选?搞懂类型才能做好动画
Maya摄影机类型深度解析:从原理到实战的动画控制艺术 在三维动画制作中,摄影机就像导演的眼睛,决定了观众将如何观看你创造的世界。Maya提供了三种基础摄影机创建方式,看似简单的选择背后,却直接影响着动画控制的流畅度…...

终极艾尔登法环性能优化指南:3步解锁帧率限制与视野扩展
终极艾尔登法环性能优化指南:3步解锁帧率限制与视野扩展 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/E…...

从思维链到思维图:大语言模型推理范式的跃迁与实践
1. 项目概述:从“思维链”到“思维图”的范式跃迁如果你最近在关注大语言模型(LLM)的应用前沿,特别是如何让它们更可靠、更聪明地解决复杂问题,那么“思维链”(Chain-of-Thought, CoT)这个概念你…...
)
AI原生测试生成自动化落地全景图(2026奇点大会闭门报告首次解禁)
更多请点击: https://intelliparadigm.com 第一章:AI原生测试生成自动化:2026奇点智能技术大会测试用例生成 核心范式跃迁 传统基于规则或模板的测试生成已无法应对大模型驱动下的动态接口、多模态输入与上下文敏感逻辑。2026奇点智能技术大…...

3种终极方案破解Navicat Mac版14天试用限制:一键无限重置教程
3种终极方案破解Navicat Mac版14天试用限制:一键无限重置教程 【免费下载链接】navicat_reset_mac navicat mac版无限重置试用期脚本 Navicat Mac Version Unlimited Trial Reset Script 项目地址: https://gitcode.com/gh_mirrors/na/navicat_reset_mac 还在…...
别再死记硬背了!用一张图帮你理清Spring全家桶里那些让人头疼的注解(@Autowired, @Transactional, @Value等)
Spring注解全解析:从零构建高效开发思维图谱 1. 引言:为什么需要系统性理解Spring注解? 每次打开Spring项目的代码,你是否会被各种以符号开头的注解弄得眼花缭乱?Autowired、Transactional、Value这些注解看似简单&…...

TinyClaw:微智能体协同框架,打造个人AI自动化工作流
1. 项目概述:从单兵作战到团队协作的AI助手进化如果你和我一样,长期在个人效率工具和自动化脚本的海洋里折腾,那你肯定经历过这样的场景:为了处理一个稍微复杂点的任务,比如“整理上周的会议纪要,提取关键待…...
)
SITS大会技术社区交流活动实战指南(附2024最新人脉激活话术库)
更多请点击: https://intelliparadigm.com 第一章:SITS大会技术社区交流活动 SITS(Software Innovation & Technology Summit)大会作为国内聚焦开源协作与工程实践的年度技术盛会,其技术社区交流活动以“共建、共…...

别再只盯着TOF了!从三角测距到相控阵,一文搞懂激光雷达的四种测距原理与选型避坑
激光雷达技术全景解析:从基础原理到工程选型实战指南 当扫地机器人精准绕开你的拖鞋,当自动驾驶汽车在暴雨中识别障碍物,背后都离不开一项关键技术——激光雷达。作为机器感知环境的"眼睛",激光雷达的性能直接决定了整个…...